
Abstract
This article is concerned with free vibration analysis of open circular cylindrical shells with either the two straight edges or the two curved edges simply supported and the remaining two edges supported by arbitrary classical boundary conditions. An analytical solution of the traveling wave form along the simply supported edges and the standing wave form along the remaining two edges is obtained based on the Flügge thin shell theory. With such a unidirectional traveling wave form solution, the method of reverberation-ray matrix is introduced to derive the equation of natural frequencies of the open circular cylindrical shell with various boundary conditions. Then, the golden section search algorithm is employed to obtain the natural frequencies of the open circular cylindrical shell. The calculation results are compared with those obtained by the finite element method and the method in available literature. Finally, the natural frequencies of the open circular cylindrical shell with various boundary conditions are calculated and the effects of boundary conditions on the natural frequencies are examined. The calculation results can be used as benchmark values for researchers to check their numerical methods and for engineers to design thin structures with shell components.
Keywords
Introduction
Thin shells are extensively used in naval architecture and ocean engineering, as well as in civil, mechanical, and aeronautical engineering. Open circular cylindrical shells (OCCSs) are often applied as structural components of pressure vessels, roof structures, open space buildings, and marine structures. It is of great significance for engineers to be familiar with vibration behaviors of such shell structures in practical design.
Vibration of OCCSs has been studied by many researchers in the past decades. A comprehensive presentation of the available results for vibration of shell structures was provided by Leissa, 1 in which various theoretical models are presented and the free vibration characteristics of the OCCSs are analyzed. The early researches on OCCSs mainly involve the free vibration analysis with numerical methods such as the Rayleigh–Ritz method,2–4 the spline finite strip method, 5 and the finite element method (FEM).6–10
Ohga et al. 11 presented an analytical procedure to estimate natural frequencies and modes of open cylindrical shells with a circumferential thickness taper by the transfer matrix method. The transfer matrix is derived from the nonlinear differential equations for the cylindrical shells by numerical integration. Lim et al.12,13 proposed a higher order shear deformation theory to investigate the vibratory characteristics of thick cylindrical shallow shells of rectangular planform and then analyzed the effects of various shell geometries and boundary conditions on the vibration responses. Yu et al. 14 obtained exact solutions for OCCSs with simple boundary conditions using the generalized Navier method and accurate solutions for shells with mixed boundary conditions using the method of superposition. Price et al. 15 reviewed the theories of vibration of cylindrical pipes and open shells within the context of thin shell theory. A summary of the thin shell equations of motion and the solutions corresponding to several thin shell theories are presented and applied in a specific example, and the calculation results are compared with those obtained by the FEM. Zhang et al. 16 presented the vibration analysis of cylindrical panels using a wave propagation method. The calculation results are evaluated against those available in the literature. Toorani and Lakis 17 discussed the free vibration of anisotropic laminated composite, as well as isotropic open or closed cylindrical shells submerged in and subjected simultaneously to an internal and external incompressible, inviscid fluid on the basis of a refined shell theory in which transverse shear deformation and rotary inertia effects are taken into account. Gulgazaryan 18 studied natural vibrations localized at the free edge (FE) of a semi-infinite, elastic, orthotropic, circular cylindrical shell of open profile. A variational full-filled method for the free vibration analysis of open circular cylindrical laminated shells supported at discrete points was presented by Singh and Shen, 19 in which a differential equation in matrix form is developed using the first-order shear deformable theory of shells, and rotary inertia is included. Kandasamy and Singh 20 presented a numerical study for the free vibration of skewed open circular cylindrical deep shells. Since the formulation is based on the first-order shear deformation theory and includes the rotary inertia, the vibration behaviors of thin to moderately thick shells can be analyzed. Zhang and Xiang,21,22 respectively, developed an analytical procedure for determining the natural frequencies of OCCSs with stepped thickness variations and with intermediate ring supports based on the Flügge thin shell theory. Gulgazaryan et al. 23 investigated the vibrations of a thin elastic orthotropic circular closed cylindrical shell with free and hinge-mounted ends and of an open cylindrical shell with free and hinge-mounted edges, when the two boundary generatrices are hinge-mounted. Kandasamy and Singh 24 presented the free vibration analysis of open skewed circular cylindrical shells supported only on selected segments of the straight edges by means of numerical methods. Wang et al.25,26 investigated the nonlinear dynamic response of a cantilever rotating circular cylindrical shell subjected to a harmonic excitation about one of the lowest natural frequency and the nonlinear dynamic response in forced oscillations of a third-order nonlinear partial differential system with the method of harmonic balance.
Recently, Ye et al. 27 presented a unified Chebyshev–Ritz formulation for the free vibration analysis of open shells with arbitrary boundary conditions and various geometric parameters such as subtended angle and conicity, and the formulation was extended to investigate the vibrations of composite laminated deep open shells with various shell curvatures and arbitrary restraints, including cylindrical, conical, and spherical shells by the subsequent work. 28 Su et al. 29 presented the free vibration analysis of functionally graded open shells including cylindrical, conical, and spherical shells with arbitrary subtended angle and general boundary conditions.
As far as the authors are concerned, researches on vibration analysis of plate-shell coupled structures are rare, especially for those with analytical methods. For the available literature, the accuracy of the approximate methods is less than that of the analytical methods. While the available analytical methods are sometimes too targeted for shell structures to be consistent with exact solutions of other structural components, such as beams and plates. The method of reverberation-ray matrix (MRRM) is a suitable method for determining natural frequencies and steady-state response of multi-span structures and space frame structures with complex geometry. MRRM was first proposed by Howard and Pao to analyze wave propagation in planar trusses.30–32 Subsequently, Pao and his associates extended the method to study waves propagating in a multilayered media.33–38 Many attentions on applications of MRRM were paid to dynamic analysis of frames and beams.39–51 Meanwhile, MRRM is also employed to analyze unidirectional wave propagation through plates52–56 and closed shells.57–59 Recently, the research objects of MRRM turn to be functionally graded or laminated structures.50,55,59–62 The unidirectional traveling wave form solution for OCCSs obtained in this article is of good consistency with the solutions for beams and plates presented in literature.42,43,47,52,53,58 Therefore, the formulation presented in this article is a fundamental research for vibration analysis of ring-stiffened OCCSs and plate-shell coupled structures.
This article is concerned with an analytical procedure for free vibration analysis of an isotropic OCCS with either the two straight edges or the two curved edges simply supported (SS) and the remaining two edges supported by arbitrary classical boundary conditions. Based on the Flügge thin shell theory, the force and moment resultants and the equations of motion for an OCCS are presented in the beginning. Then, analytical solutions of the traveling wave form along the SS edges and the standing wave form along the remaining two edges are obtained for OCCSs with either two SS straight edges or two SS curved edges. With the solutions expressed in matrix form, the scattering matrix, phase matrix, and permutation matrix as well as the reverberation-ray matrix of the OCCS are derived. Then, the equation of natural frequencies of the OCCS is obtained by MRRM and subsequently solved by the golden section search algorithm.63,64 The natural frequencies for the OCCS with all four SS edges are obtained by the method presented in this article and the results are compared with those obtained by FEM and the method presented in available literature. Finally, the natural frequencies of the OCCS with various boundary conditions are calculated and the effects of the boundary conditions on the natural frequencies are revealed at the end of this article.
Formulation
Consider an isotropic, OCCS with length L, included angle θ0, uniform thickness h, middle surface radius R, Young’s modulus E, Poisson’s ratio µ, and mass density ρ, as shown in Figure 1. The axial, circumferential, and radial displacements of the middle surface of the OCCS with reference to the coordinate system are denoted as u(x, θ, t), v(x, θ, t), and w(x, θ, t), respectively. Either the two straight edges or the two curved edges of the shell are assumed to be SS in the following discussions. The problem at hand is to determine the natural frequencies of the OCCS.
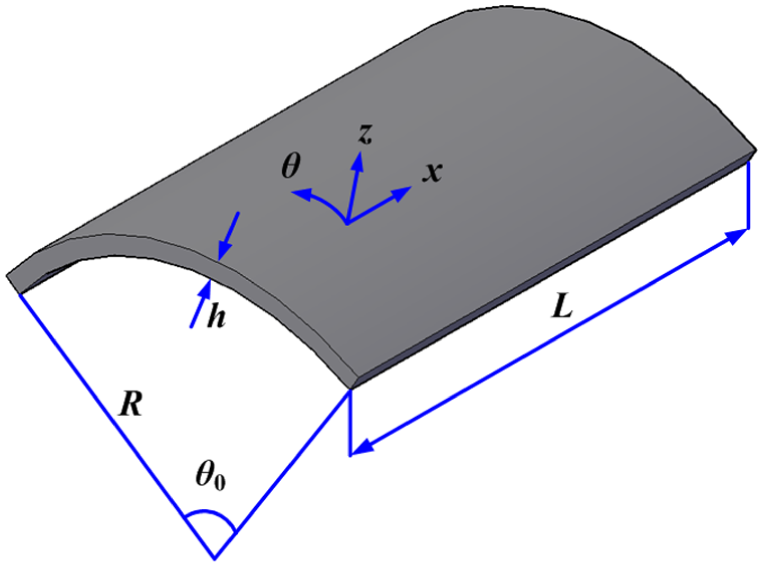
Geometry and coordinate system for an OCCS.
To begin with, the relations of the force and moment resultants with the displacements and the governing equations based on the Flügge thin shell theory are introduced. Subsequently, with the employment of Fourier transform, an analytical solution of the traveling wave form along the SS edges and the standing wave form along the remaining two edges is obtained in the frequency domain. Then, the solutions of the displacements and the force and moment resultants are expressed in matrix form. Finally, the equations of natural frequencies of the OCCS with various classical boundary conditions are obtained by MRRM and solved by the golden section search algorithm. The above-mentioned formulation is presented in detail as follows.
Force and moment resultants
The force and moment resultants in an OCCS, as shown in Figure 2, are expressed in terms of displacement components u, v, and w as follows 1












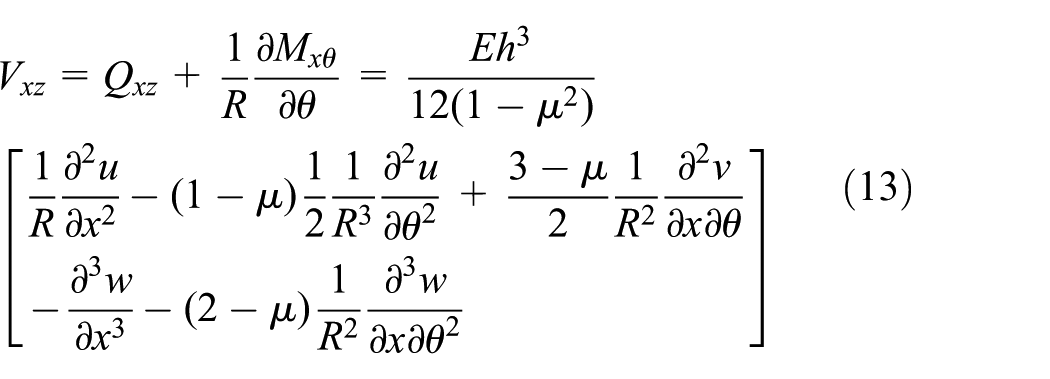
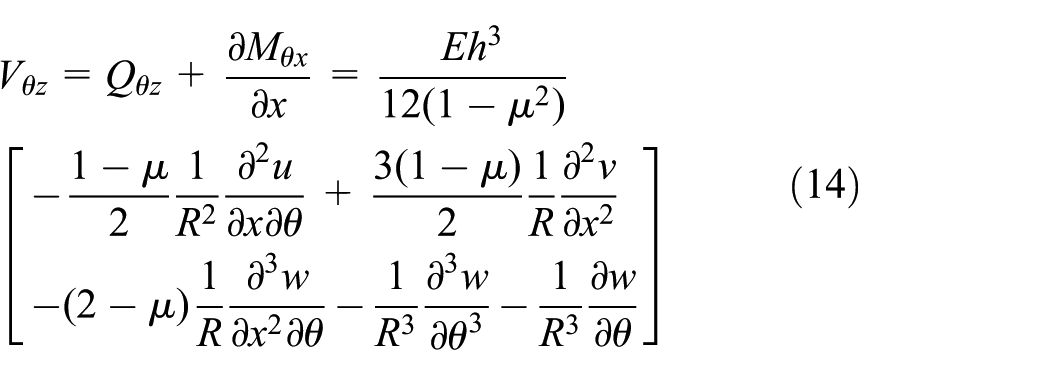
where u, v, and w denote the displacement components in the axial (x), circumferential (θ), and radial (z) directions, respectively. C = Eh/(1 − µ2) and D = Eh3/12(1 − µ2) represent the middle surface stiffness and the bending stiffness of the shell, respectively. Nxx and Nθθ denote the in-plane normal forces, Nxθ and Nθx the in-plane shear forces, Mxx and Mθθ the bending moment, Mxθ and Mθx the torsional moment, and Qxz and Qθz the out-of-plane shear forces acting on the cross sections perpendicular to the axial and circumferential directions, respectively. Besides, Fxθ and Fθx indicate the in-plane shear force resultants and Vxz and Vθz the out-of-plane shear force resultants acting on the cross sections perpendicular to the axial and circumferential directions, respectively.

Force and moment resultants in a shell (positive directions are indicated).
Governing differential equations
Based on the Flügge thin shell theory, the governing differential equations for free vibration of an OCCS are written as1,65



where λ = h2/12R2 is a dimensionless parameter, which is related to the ratio of the shell thickness to shell radius.
The Fourier transform of an arbitrary physical quantity X(t) is defined as

where ω is the circular frequency, and a tilde over a symbol represents the corresponding quantity expressed in the frequency domain. The inverse Fourier transform is given by

Taking the Fourier transforms of equations (15)–(17), the governing differential equations can be expressed in the frequency domain as
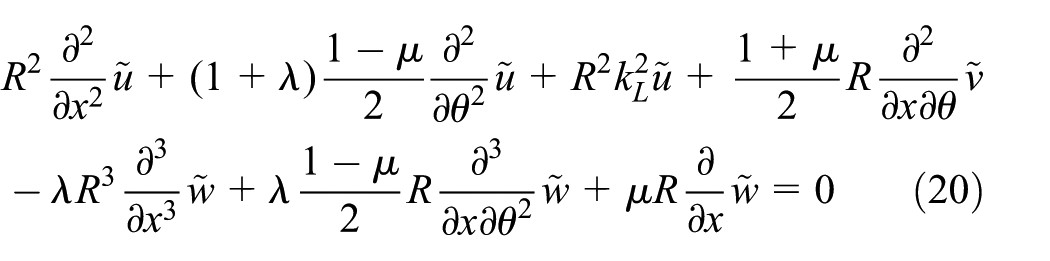


where kL = ω[(1 − µ2)ρ/E]1/2 represents the in-plane longitudinal wave number.
Equations (20)–(22) can be represented in linear differential operator form as



Substituting equation (23) into equation (24) and eliminating the circumferential displacement

Substituting equation (23) into equation (24) and eliminating the axial displacement

Similarly, substituting equation (23) into equation (25) and eliminating the circumferential displacement

Substituting equation (24) into equation (25) and eliminating the axial displacement
All the above-mentioned linear differential operators Lj (j = 1–8) are presented in detail in section “Linear differential operators Li” in Appendix 1.
Subsequently, substituting equation (26) into equation (28) and eliminating the radial displacement
In a similar manner, substituting equation (27) into equation (29) and eliminating the radial displacement

However, with the radial displacement

It can be observed from equations (30)–(32) that the differences among the linear differential operators operating on the axial, circumferential, and radial displacement components lie in the parts outside the braces, which represent zero wave number solutions, or in other words, the rigid-body motions. As is the case in free vibration analysis, the zero wave number solutions will be neglected throughout this article.
Solutions for the OCCS with the curved edges supported by SSs
As the two curved edges of the OCCS are assumed to be SS, the boundary conditions at x = 0 and x = L are given by 1

According to the boundary conditions defined by equation (33), the axial, circumferential, and radial displacements of the OCCS can be expressed as



where kx = mπ/L denotes the wave number in the axial direction, m is the axial mode number, and L represents the length of the OCCS.
Assuming that the axial, circumferential, and radial displacements can be expressed as exponential functions of the circumferential variable θ, a common circumferential wave number equation for the axial, circumferential, and radial displacements of the OCCS is obtained
where µj (j = 1, 2), λ1 and ξj (j = 1–10) are the non-dimensional parameters presented in detail in sections “Dimensionless parameters µj and λj” and “Dimensionless parameters ξj” in Appendix 1.
By solving equation (37), eight circumferential wave numbers are obtained

Therefore, the solutions of the equations of motion of the OCCS with two SS curved edges are expressed in the frequency domain as



where αj and βj (j = 1–4) are the ratios of the amplitude coefficients of the axial and circumferential displacements to the amplitude coefficient of the radial displacement, respectively. The expressions of αj and βj are presented as follows


The rotation of the normal to the middle surface of the OCCS about the axial direction is defined as

According to equations (40) and (41), the above-mentioned rotation can be expressed in frequency domain as

Besides, substitution of equations (39)–(41) into the Fourier transforms of equations (2), (6), (12), and (14) yields the frequency domain expressions of the force and moment resultants of the OCCS




Solutions for the OCCS with SS straight edges
Since the derivation for solutions of the OCCS with SS straight edges is independent of the derivation for the OCCS with SS curved edges and the two derivation procedures are quite similar to each other, the symbols used in this section will be very similar and frequently the same to those used in the preceding section.
As the two straight edges of the OCCS are assumed to be SS, the boundary conditions at θ = 0 and θ = θ0 are given by 1

According to the boundary conditions defined by equation (50), the axial, circumferential, and radial displacements of the OCCS are written as



where kθ = nπ/θ0 denotes the circumferential wave number, n is the mode number, and θ0 represents the included angle of the OCCS.
Assuming that the axial, circumferential, and radial displacements are expressed as exponential functions of the axial variable x, a common axial wave number equation of the axial, circumferential, and radial displacements of the OCCS can be obtained as

where µ2 and λj (j = 2, 3) are the non-dimensional parameters presented in detail in section “Dimensionless parameters µj and λj” in Appendix 1. While ζj (j = 1–9) are the dimensional parameters of the same dimension as the axial wave number, and they are presented in detail in section “Dimensional parameters ζj” in Appendix 1.
By solving equation (54), eight axial wave numbers are obtained

Thus, with respect to the boundary conditions defined by equation (50), the solutions of equations (30)–(32) are written as



where αj and βj (j = 1–4) are the ratios of amplitude coefficients of the axial and circumferential displacements to the amplitude coefficient of the radial displacement. The expressions of αj and βj are presented as follows


The rotation of the normal to the middle surface about the circumferential direction is defined as

According to equation (61), the above-mentioned rotation is expressed in frequency domain as

Substituting equations (56)–(58) into the Fourier transforms of equations (1), (5), (11), and (13) yields the frequency domain expressions of the force and moment resultants of the OCCS


Solutions expressed in matrix form
SS curved edges
For an arbitrary axial mode number m, equations (39)–(41) and (45) can be expressed in matrix form as

where



in which




where j = 1, 2, 3, 4.
Meanwhile, equations (46)–(49) can be expressed in matrix form as

where


in which the physical significances and expressions of

where j = 1, 2, 3, 4.
SS straight edges
For an arbitrary circumferential mode number n, equations (56)–(58) and (62) can be rewritten in the same matrix form as equation (67) only if the element


Besides, the elements of the coefficient matrices

where j = 1, 2, 3, 4.
In a same manner, equations (63)–(66) can be written in the same matrix form as equation (75) only if the axial mode matrix

Besides, the elements of the coefficient matrices
where j = 1, 2, 3, 4.
Equation of the natural frequencies
Taking advantage of the unidirectional traveling wave form solutions of the OCCS with SS curved edges and SS straight edges, respectively, obtained in sections “Solutions for the OCCS with the curved edges supported by SSs” and “Solutions for the OCCS with SS straight edges,” the MRRM is introduced to derive the equation of natural frequencies of the OCCS. Since the scattering matrix is related to the boundary conditions of the remaining two edges, it will be discussed in the first step. Then, the phase matrix and permutation matrix, which are independent of the boundary conditions, are obtained. Finally, the reverberation-ray matrix and the equation of natural frequencies of the OCCS are derived. The formulations mentioned above are presented in detail in the following discussion.
Since the derivation procedures for equations of natural frequencies of the OCCS with SS curved edges and SS straight edges are quite similar to each other, the one for SS curved edges will be taken as an example and the other one will be omitted. Note that the only difference between the two derivation procedures is that the one for SS curved edges takes advantage of the solutions obtained in section “Solutions for the OCCS with the curved edges supported by SSs” while the other one employs the solutions obtained in section “Solutions for the OCCS with SS straight edges” instead.
Scattering matrix for various classical boundary conditions
With regard to an OCCS with SS curved edges and SS straight edges, the boundary conditions and the dual local coordinate systems of the OCCS are, respectively, shown in Figure 3(a) and (b). The scattering matrices for the remaining two edges corresponding to various classical boundary conditions, including SS, FE, and clamped edge (CE), are derived in the following discussion.

Boundary conditions and the dual local coordinate system of the shell: (a) curved edges supported by SSs and (b) straight edges supported by SSs.
1. SS
Assuming that the OCCS is SS at Node Line 1, namely, the boundary conditions are defined in the local coordinate (oxθz) 12 as

Substitution of equations (39), (41), (46), and (47) into the Fourier transform of equation (84) yields




Equations (85)–(88) can be presented in matrix form as

where
2. FE
Assuming that the edge of the OCCS at Node Line 1 is free, namely, the boundary conditions are defined in the local coordinate (oxθz) 12 as

Substitution of equation (75) into the Fourier transform of equation (90) yields

Since the phase matrix turns into a unit matrix at the origin of the local coordinate, equation (91) can be presented in the same form as equation (89) with the scattering matrix replaced by
3. CE
Assuming that the edge of the OCCS at Node Line 1 is clamped, namely, the boundary conditions are defined in the local coordinate (oxθz) 12 as

Substitution of equation (67) into the Fourier transform of equation (92) results in

In a same manner, equation (93) can be presented in the same form as equation (89) with the scattering matrix replaced by
Similarly, the scattering relation for the OCCS at Node Line 2 is presented as

where
Assembling both the local scattering equations at Node Line 1 and Node Line 2 by stacking

where
Phase matrix and permutation matrix
The phase relations of harmonic waves in dual local coordinate system of MRRM provide additional equations for solving the unknown amplitude vectors. Note that the departing wave from Node Line 1 is exactly the arriving wave to Node Line 2, and vice versa. Therefore, the amplitudes of the departing wave and the arriving wave differ with each other by a phase factor.
With the employment of the solutions of the OCCS with SS curved edges, the relations between the amplitudes of the departing wave and the arriving wave are presented as


which are rewritten in matrix form as


Assembling both the local phase equations defined by equations (98) and (99) results in the global phase equation

where
A comparison of the two global amplitude vectors of the departing wave

where
Equation of natural frequencies
Substitution of equations (100) and (101) into equation (95) yields

where
To obtain a nontrivial solution of the global amplitude vector of the departing wave, the determinant of (

which is the equation of natural frequencies of the OCCS.
Searching algorithm for natural frequencies
As the equation of natural frequencies of the OCCS is obtained, the problem at hand is to solve the equation for the natural frequencies. It is obvious that the left-hand side of equation (103) represents a function of frequency and the natural frequencies are zeros of the function. Unfortunately, for most values of the frequency, the left-hand side of equation (103) is complex numbers, which indicates that finding the zeros needs to search the common zeros of the real part and the imaginary part of the function. To address this problem, a good idea is to search the zeros or the minimal values of the absolute value of the function. This simple approach is adopted in this article and the golden section search algorithm is introduced to determine the natural frequencies of the OCCS. The procedure for determining natural frequencies of the OCCS is shown in Figure 4. 66
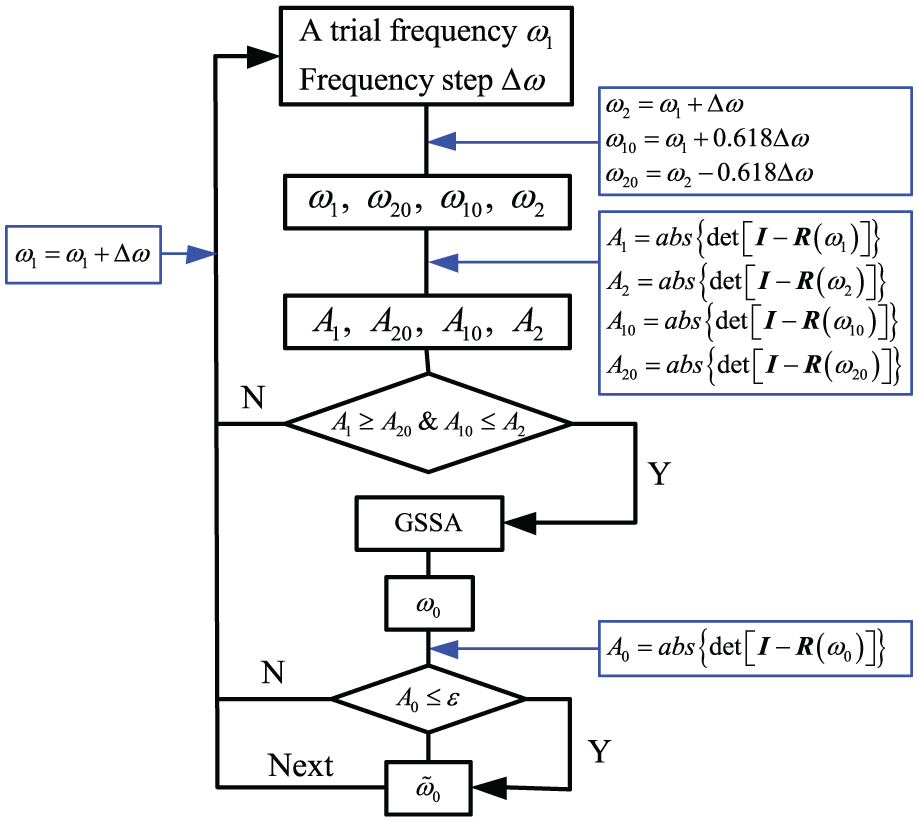
Procedure for determining natural frequencies of the OCCS.
It should be pointed out that since an increase in a frequency step Δω from the last natural frequency can be the initial estimation of the next natural frequency, only the initial estimation of the lowest natural frequency needs to be determined for a given circumferential mode number. The initial estimation of the lowest natural frequency can be determined from the curve of the absolute value of the determinant (
Besides, a calculation example is presented here to clarify the efficiency of the golden section search algorithm compared with other methods; specifically, the dichotomy method is chosen as the comparison method. Both the methods are applied to calculate the natural frequency for mode number (m, n) = (1, 1) of the OCCS with the two curved edges SS and the two straight edges clamped. The initial estimation of the natural frequency and the frequency step are, respectively, taken as 6.5 and 0.6 Hz, which are consistent with the initial searching interval (6.5, 7.1) for the dichotomy method. The consuming time for the golden section search algorithm is 0.027439 s (obtained by tic-toc in MATLAB) to find the minimum or zero point for the absolute value, and the consuming time for the dichotomy method is 0.021495 s to find the zero point for the real part and 0.037846 s to find the zero point for the imaginary part. Therefore, it is more efficient to use the golden section search algorithm to find the roots for the natural frequency characteristic equation.
Mode shape calculation for the OCCS
Substituting one of the natural frequencies determined in the preceding section into equation (102), the global amplitude vector of the departing wave
Finally, substituting the global amplitude vector of the departing wave and the arriving wave into the expressions of the displacement components of the OCCS, the mode shape corresponding to the given natural frequency is obtained.
Results and discussions
The MRRM and the golden section search algorithm are applied in this section to obtain the natural frequencies of the OCCS. To begin with, the method and the procedure presented in this article are verified by FEM and the results are given by other researchers. Then, the effects of different boundary conditions on the natural frequencies are examined.
Verification of this method
To verify the validity of the method for determining natural frequencies of the OCCS presented in the preceding sections, the natural frequencies of the OCCS with all four SS edges are obtained and the results are compared with those obtained by FEM and the method adopted by Leissa. 1 The basic parameters of the OCCS remain unchanged in this section and they are defined in Table 1.
Basic parameters of the OCCS.

The calculation results of the comparison study are presented in Table 2, in which the integer numbers m and n denote the half-wave numbers of the vibration modes in axial and circumferential directions, respectively. MRRM1 and MRRM2 represent the calculation results obtained by MRRM from the solutions for the OCCS with SS curved edges derived in section “Solutions for the OCCS with the curved edges supported by SSs” and the results obtained by MRRM from the solutions for the OCCS with SS straight edges derived in section “Solutions for the OCCS with SS straight edges.”
Comparison of natural frequencies (Hz) obtained by FEM, LM, and MRRM.

FEM: finite element method; LM: Leissa’s method; MRRM: method of reverberation-ray matrix.
It is observed from Table 2 that an excellent agreement is achieved between the results obtained by MRRM based on the two solutions and the results obtained by the method of Leissa. Therefore, the comparison study confirms the validity of MRRM for vibration analysis of OCCSs. Meanwhile, the results obtained by FEM are quite close to those obtained by the analytical methods and the mode shapes obtained by FEM and MRRM agree well with each other, which also indicates that the calculation results obtained by MRRM are validated.
Some mode shapes calculated by FEM and MRRM are presented in Figure 5. The FEM results are obtained with the common program software ANSYS, in which the geometric and material properties of the OCCS are defined according to Table 1, and 500 × 132 finite element mesh (element edge length 0.02 m) of SHELL181 elements is used during the calculation.

Comparison of some selected mode shapes calculated by FEM and MRRM: (a) FEM (m, n) = (1, 1), (b) FEM (m, n) = (3, 2), (c) FEM (m, n) = (5, 2), (d) FEM (m, n) = (8, 3), (e) MRRM (m, n) = (1, 1), (f) MRRM (m, n) = (3, 2), (g) MRRM (m, n) = (5, 2) and (h) MRRM (m, n) = (8, 3).
Besides, this method is employed to calculate the natural frequencies of an OCCS with the geometric parameters such as shell length of 0.2 m, shell radius of 0.1 m, shell thickness of 0.001 m, and the included angle of π/3 and the material properties such as Young’s modulus E = 2.1 × 1011 Pa, Poisson’s ratio µ = 0.3, and mass density ρ = 7800 kg m−3. Comparison of the results obtained by this method and those given by other researchers is presented in Table 3.
Comparison of natural frequencies (Hz) of the OCCS having its two curved edges simply supported and two straight edges free.

It can be observed from Table 3 that the present results are close to the results given by the other researchers. For most of the mode numbers, they are more close to the experimental results presented in Selmane and Lakis. 8 This further proves the validation of the method presented in this article.
Results for the OCCS with SS curved edges
Having gained confidence in this method, it is subsequently employed to calculate natural frequencies of the OCCS with the two curved edges SS while the remaining two edges supported by an arbitrary combination of SS, CE, and FE based on the solutions derived in section “Solutions for the OCCS with the curved edges supported by SSs.” The basic parameters of the OCCS are defined in Table 1 and the calculation results corresponding to various boundary conditions of the remaining two edges are presented in Table 4. It should be pointed out that the FE effect is neglected in determining the mode number for each of the natural frequencies. As the remaining two edges are supported by SS–CE, CE–CE, and CE–FE, the natural frequencies corresponding to the circumferential mode number n = 1 are almost the same, which indicates that with two curved edges SS and one of the straight edges clamped, the boundary condition of the remaining edge hardly affects the natural frequencies of the OCCS corresponding to the circumferential mode number n = 1.
Natural frequencies (Hz) of the OCCS with the curved edges simply supported and the remaining two edges supported by various boundary conditions.

BC: boundary condition; CE: clamped edge; SS: simply supported; FE: free edge.
For a better illustration, the results presented in Table 4 are plotted in Figure 6, in which the variation curves of natural frequencies against the circumferential mode number are shown for each of the axial mode numbers.

Comparison of natural frequencies of the OCCS with simply supported curved edges and the remaining two edges supported by various boundary conditions.
It can be observed from Figure 6 that for most axial mode numbers with an exception of m = 1, the natural frequencies for SS–SS, SS–FE, and FE–FE vary against the circumferential mode number in a similar pattern, which means that the natural frequencies of the OCCS first decrease and then increase with the increase in the circumferential mode number. The minimal natural frequency corresponds to different circumferential mode numbers for different axial mode numbers and different boundary conditions. In this article, the circumferential mode number corresponding to the minimal natural frequency is defined as the minimal frequency mode number. As the circumferential mode number is smaller than the minimal frequency mode number, the natural frequencies for SS–SS, SS–FE, and FE–FE decrease in turn. However, as the circumferential mode number is larger than the minimal frequency mode number, the highest to lowest order for the natural frequencies corresponding to the three boundary conditions turns to be FE–FE, SS–FE, and SS–SS.
Meanwhile, for circumferential mode numbers smaller than 5 or 6, the natural frequencies corresponding to SS–CE and CE–FE are very close to each other, and they are approximately linearly related to the circumferential mode number. While as the circumferential mode number is larger than 5 or 6, the natural frequency curve of SS–CE approaches to coincide with the one for SS–FE, and the natural frequency curve of CE–FE tends to coincide with the one for FE–FE.
Besides, the natural frequencies corresponding to CE–CE fluctuate upon those for SS–CE and CE–FE. Generally, for even circumferential mode numbers, the natural frequencies of CE–CE are much larger than those of SS–CE and CE–FE, while for odd circumferential mode numbers, they are very close to those of SS–CE and CE–FE.
Results for the OCCS with SS straight edges
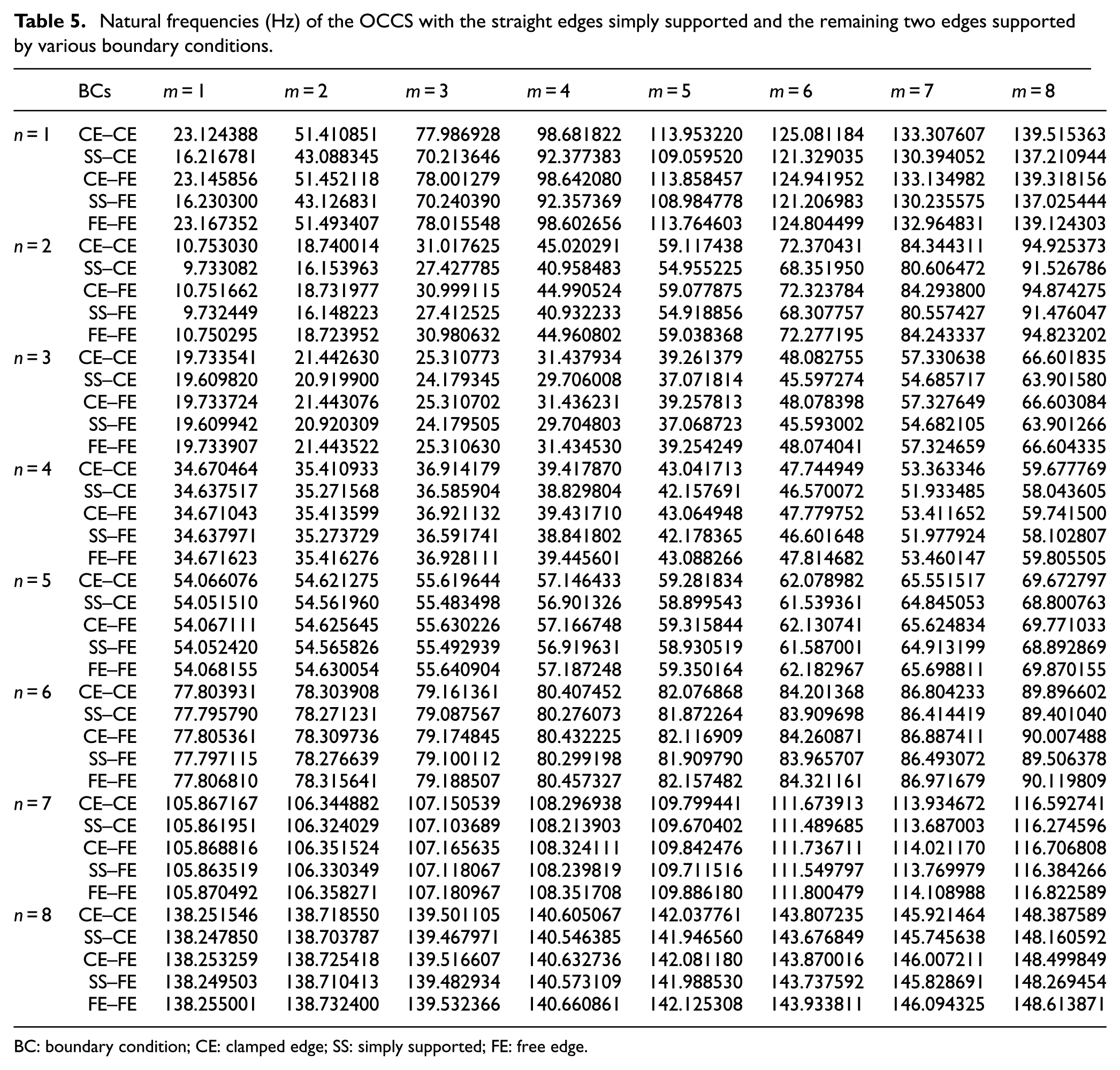
Based on the solutions derived in section “Solutions for the OCCS with SS straight edges,” the MRRMs are employed to calculate the natural frequencies of the OCCS with the two straight edges SS while the remaining two edges supported by an arbitrary combination of SS, CE, and FE. The basic parameters of the OCCS are defined in Table 1 and the calculation results corresponding to various boundary conditions of the remaining two edges are presented in Table 5.
Natural frequencies (Hz) of the OCCS with the straight edges simply supported and the remaining two edges supported by various boundary conditions.
BC: boundary condition; CE: clamped edge; SS: simply supported; FE: free edge.
For a better illustration, the results presented in Table 5 are plotted in Figure 7, in which the variation curves of the natural frequencies against the axial mode number are shown for each of the circumferential mode numbers.

Comparison of natural frequencies of the OCCS with simply supported straight edges and the remaining two edges supported by various boundary conditions.
It can be observed from Figure 7 that with the two straight edges SS, the effects of boundary conditions of the remaining two edges on the natural frequencies of the OCCS are not significant in general. The natural frequencies for FE–FE, CE–FE, CE–CE, SS–FE, SS–CE, and SS–SS decrease in sequence.
Figure 7 also shows that for circumferential mode numbers smaller than 6, the natural frequencies of the OCCS for different boundary conditions vary with the axial mode number in three different curves. Specifically, CE–CE, CE–FE, and FE–FE share the highest one, SS–CE and SS–FE take the middle one, and SS–SS holds the lowest one. However, as the circumferential mode number is larger than 6, all the natural frequencies corresponding to various boundary conditions are very close to each other, which indicates that for large circumferential mode numbers, boundary conditions of the curved edges have no much influence on the natural frequencies of the OCCS with the two straight edges SS.
Conclusion
This article presents an analytical solution procedure for free vibration analysis of the OCCS with two opposite edges SS and the remaining two edges supported by various combinations of classical boundary conditions. Based on the Flügge thin shell theory, the force and moment resultants and the equations of motion for an OCCS are introduced. With the employment of Fourier transform, the solutions of the traveling wave form along the SS edges and the standing wave form along the remaining two edges are obtained. Then, MRRM is applied to derive the equation of natural frequencies and the golden section search algorithm is employed to solve for the natural frequencies of the OCCS. The proposed method has been verified through the comparison of the present results against those obtained by FEM and presented in available literature. Finally, the effects of boundary conditions of the remaining two edges on the natural frequencies are investigated. It can be concluded as follows:
With the two curved edges SS and one of the straight edges clamped, the boundary condition of the remaining edge hardly affects the natural frequencies of the OCCS corresponding to the circumferential mode number n = 1.
With the two curved edges SS, the natural frequencies for SS–SS, SS–FE, and FE–FE vary against the circumferential mode number in a similar pattern, namely, first decrease and then increase with the increase in the circumferential mode number for most axial mode numbers. The natural frequencies corresponding to SS–CE and CE–FE are very close to each other for small circumferential mode numbers; however, the natural frequency curve of SS–CE tends to coincide with the one for SS–FE, and the natural frequency curve of CE–FE tends to coincide with the one for FE–FE for large circumferential mode numbers.
With the two straight edges SS, the effects of boundary conditions of the remaining two edges on the natural frequencies of the OCCS are not significant in general. However, the natural frequencies for FE–FE, CE–FE, CE–CE, SS–FE, SS–CE, and SS–SS decrease in sequence.
For small circumferential mode numbers, the natural frequencies of the OCCS for different boundary conditions vary with the axial mode number in three different curves, CE–CE, CE–FE, and FE–FE share the highest one, SS–CE and SS–FE take the middle one, and SS–SS holds the lowest one. However, for large circumferential mode numbers, boundary conditions of the curved edges have no much influence on the natural frequencies of the OCCS with the two straight edges SS.
It is particularly pointed out that the formulation presented in this article is a fundamental work to apply MRRM to vibration analysis of complex structures composed of OCCSs.
Footnotes
Appendix 1
For simplicity and clarity of this article, some lengthy linear differential operators and parameters are replaced by equivalent indexes. However, for the strictness of the presentation, the equivalent indexes are defined in the appendix.
Acknowledgements
The authors would like to sincerely thank Miss Jingjing Yu and Mr Qingshan Wang for the scientific discussions and suggestions and the anonymous reviewers for the critical and constructive comments on this article.
Academic Editor: Farzad Ebrahimi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by National Natural Science Foundation of China (Grant Nos 51509047, 51279038, and 51479041) and Fundamental Research Funds for Central Universities (HEUCF150105). The authors would like to express their profound thanks for the financial support.