
Abstract
In the conditions of Gaussian noise, symmetric alpha stable impulse noise, multipath propagation, Doppler effect, and so on, a joint synchronization algorithm is proposed for underwater acoustic communication system based on fractional Fourier transform orthogonal frequency division multiplexing. The algorithm realizes the orthogonal multicarrier underwater acoustic communication system synchronization based on that the symmetrical triangular linear frequency modulation signal has the energy convergence in the domain of fractional Fourier transform. In order to verify the effectiveness of the algorithm, hyperbolic frequency modulation signal and linear frequency modulation signal are used as the evaluation index, and the synchronization performance of bit error rate of them is compared by simulation and pool experiments. The simulation results show that the proposed algorithm in this article is resistant to Gaussian noise, symmetric alpha stable pulse noise, multipath propagation, and Doppler effect, compared with traditional synchronization algorithms; the synchronization error probability is low at the same signal-to-noise ratio.
Keywords
Underwater acoustic communication technology is an important technical means for the real-time acquisition, processing, and transmission of the marine environmental parameters in the marine monitoring system 1 at present. Because of the existence of the underwater acoustic channel’s space-varying characteristics and time-varying characteristics, the time of the acoustic channel not only has time delay and Doppler frequency shift but also contains various types of noise and interference. Coupled with a large number of pulse components in underwater acoustic noise, we need to use the symmetric alpha stable (SαS) stable distribution model to express. Therefore, the noise and interference with the sound source signal superposition will seriously affect the synchronization and subcarrier orthogonality of orthogonal frequency division multiplexing (OFDM) underwater acoustic communication system. How to accurately realize the synchronization parameter estimation is the key and hot research topic in OFDM2–6 system. The main literature7–9 gives some estimation scheme of synchronization parameters for the OFDM system. But for underwater acoustic communication, there are some problems such as the complexity of operation and the estimation accuracy. The performance of synchronization signals of hyperbolic frequency modulation (HFM) and linear frequency modulation (LFM) compared with the time domain correlation method based on time delay was studied using fractional lower order cycle fuzzy function and joint estimation of Doppler frequency shift, for SαS stable distribution noise to get better performance.10–12 In order to further improve the performance of the synchronization parameters’ estimation in OFDM underwater acoustic communication system, the symmetrical triangular linear frequency modulation (STLFM) signals are used to obtain the higher joint estimation and synchronization performance.
The rest of the article is organized as follows. The first part introduces the synchronization parameters in underwater acoustic fractional Fourier transform (FRFT)-OFDM communication system. The second part gives the analysis and derivation of the joint synchronization algorithm. The third part gives the algorithm simulation results under different environmental noise and interference and pools the results with synchronization error rate and carrier frequency offset mean square error (MSE) as evaluation index for performance evaluation. The results are given in the last part.
Synchronization parameters
The synchronization of OFDM underwater acoustic communication system includes time (timing), sampling value, and carrier frequency synchronization. 9
Assuming that N is the number of subcarriers in the OFDM underwater acoustic communication system, Ts is the sampling period of the transmitter, and Hypothesis

In equation (1),
If there is relative motion between the transmitter and the receiver, the Doppler frequency shift will be generated. Assuming that

In equation (2), D represents the time delay,
The Doppler frequency shift for the kth subcarrier of OFDM can be represented as

In this equation,
Joint synchronization parameter estimation
STLFM signal features
Assuming that A is the amplitude of STLFM signal,

In case that the Doppler frequency shift is not too much, the frequency modulation slope of STLFM signal can be seen as the same. Using equation (4), we will get the positive and negative frequency modulation slopes of STLFM signal, represented as
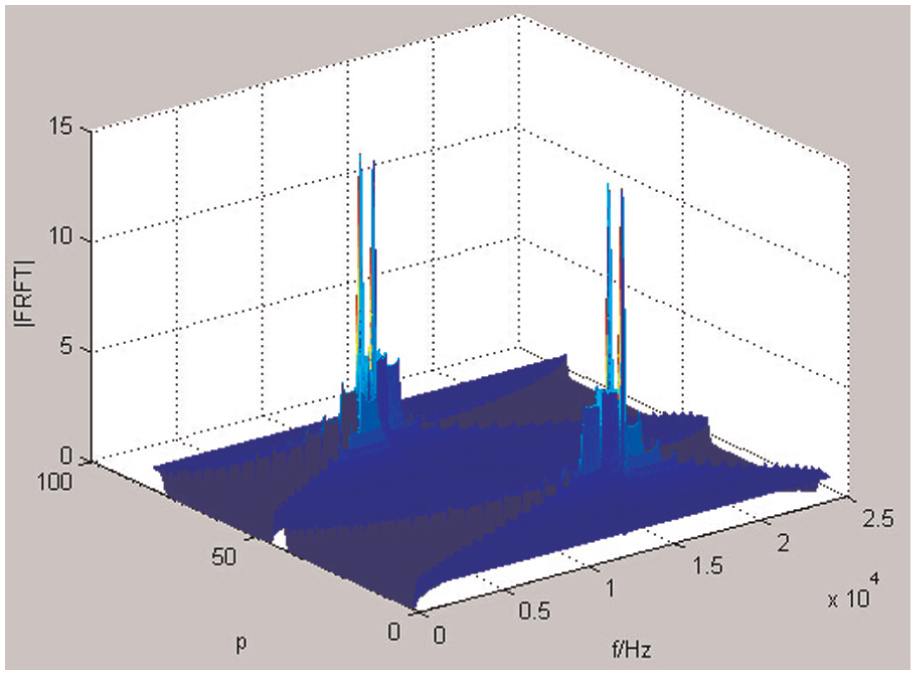
FRFT domain analysis of STLFM signal.
Synchronization parameters’ estimation of FRFT-OFDM system
It can be seen obviously that in Figure 2 the STLFM signal with a length of NL is added as the synchronization code for FRFT-OFDM underwater acoustic communication system and the transmission is achieved by an independent subcarrier in order to achieve synchronization, The period of synchronous code is represented as

Structure of sent OFDM signal.
At the receiving hydrophone end, the received signal of random selection with a long of

where
From the analysis of section “STLFM signal features,” we analyze the STLFM signal at the P level of FRFT

In equation (7),

In the same way, the second impulse response points are searched, and the location
Search the third impulse response points and remember the location

Then get the solution of simultaneous equations (8), (9), and (10) as follows

Among them

In the same way, the FRFT signal at the STLFM level of the p2 is analyzed, and the corresponding rotation angle is α2, which can be obtained
Among them

The above analysis shows that the STLFM signals can be done at two FRFT in
The simulation and experimental results’ analysis
The parameter estimation performance simulation analysis
The underwater acoustic communication simulation system we used in the experiment adopts quadrature phase shift keyin (QPSK) modulation method. Its parameters are set as follows: FRFT length 256, cyclic prefix length of 64, the sampling frequency of 48 kHz, and channel multipath number is 3. Assuming that initial distance between the emission source and receiving hydrophone is 2000 m, the relative speed of them is 20m/s, the channel noise is Gaussian. The parameters of the simulation signal are shown in Table 1.
Simulation signal parameters.

Tables 2–4 indicate the signal-to-noise ratio (SNR) in −5, 5, and 15 dB, respectively, 1000 times of the simulation results.
Parameter estimation results when SNR = −5 dB.
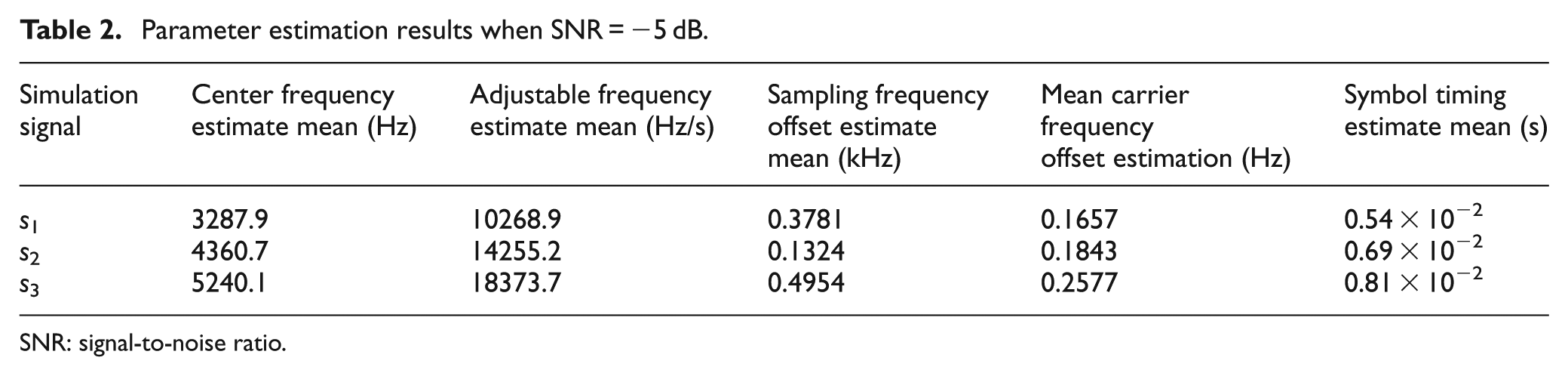
SNR: signal-to-noise ratio.
Parameter estimation results when SNR = 5 dB.
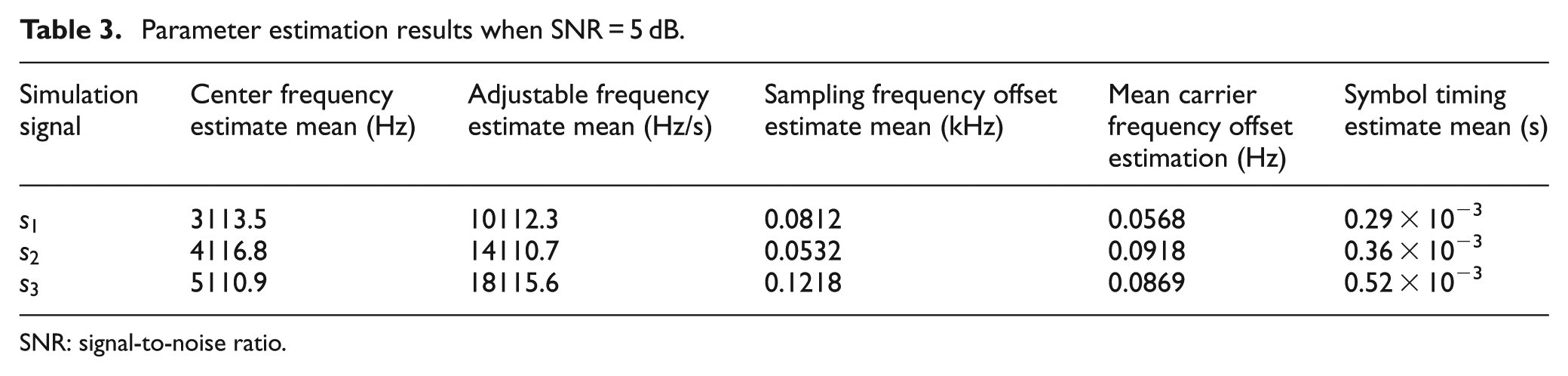
SNR: signal-to-noise ratio.
Parameter estimation results when SNR = 15 dB.

SNR: signal-to-noise ratio.
Comparison of the performance of the simulation synchronization
In order to compare the performance of the proposed algorithm, the proposed method is used to perform the timing synchronization same as the condition with the LFM or HFM synchronization signal and the fractional lower order cyclic cross ambiguity (FCCA) function estimation, and the error rate of the estimation is analyzed and compared. The results are shown in Figure 3.
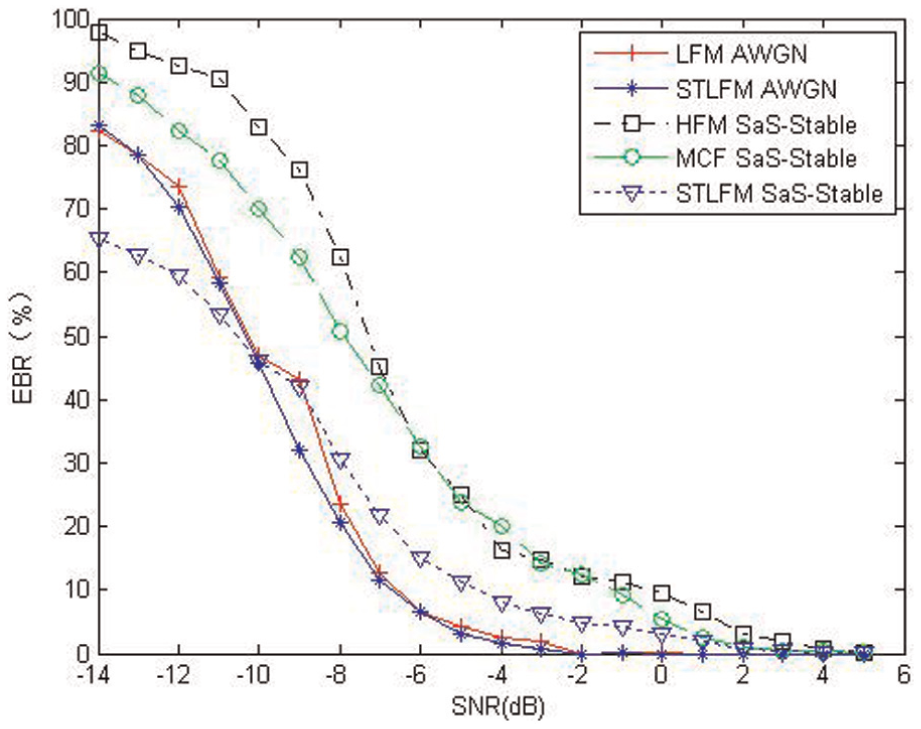
Comparison of bit error rate.
Figure 3 shows that under the condition of additive white Gaussian noise channel, LFM and STLFM synchronization performance gets close; STLFM synchronization is more stable in the situation of low SNR; what is more, with Gaussian white noise and impulse noise at the same time (α = 1.25) of mixed noise, the synchronization error rate increased evidently while using HFM, indicating that the synchronization performance significantly decreased. While using FCCA, the estimation error rate can effectively be improved, and in the case of STLFM, synchronization performance has improved significantly, as the SNR is low.
The experiment in the pool
In order to verify the performance of the underwater acoustic communication system based on FRFT-OFDM, the experiments are finished in the pool at the Key Laboratory of Underwater Acoustic Communication and Marine Information Technology Ministry of Education built in Xiamen University.
In Experiment 1, two transducers are set in water with a depth of 0.5 and 5 m away, respectively. The experiment separately uses LFM signal and STLFM signal as the synchronization code and gets three groups’ effective sample data. In Experiment 2, one transducer is set in the deep water zone and the other one is in shallow water and their interval distance is 15 m; different synchronization code experiments are adopted.
By analyzing, we get the average BER from 200 experiments. It is said that 600 samples are used to get the average values. The analyzing results are shown in Table 5. It can be seen that the BER performance of the system with STLFM signal as the synchronization code has obvious advantages, and it shows better anti-noise performance.
Comparison of BER.

SNR: signal-to-noise ratio; LFM: linear frequency modulation; STLFM: symmetrical triangular linear frequency modulation.
Conclusion
This article puts forward a joint synchronization algorithm for orthogonal multicarrier underwater acoustic communication system based on STLFM signal as synchronization code. The FRFT is adopted to estimate the parameters accurately. This algorithm gets high anti-interference and synchronization performance.
The computer simulation and the pool experimental results are as follows:
The proposed algorithm can achieve the joint estimation of time delay, Doppler frequency shift, and multipath effect and has the suppression ability to many kinds of noise such as Gauss noise, multipath propagation, and Doppler effect.
For Gaussian noise, SαS noise and more complex channel of the underwater acoustic the synchronization performance of the proposed algorithm is obviously better than other methods.
Footnotes
Academic Editor: Stephen D Prior
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by NSFC projects under Grant No. 6150031264; Fujian Provincial Natural Science Foundation under Grant Nos 2013J01203, 2015J01265, and 2014H0036; Science and Technology Plan Projects of Xiamen City under Grant No. 3502Z20130005; The Plan of College Youth Outstanding Research Talents in Fujian Province (2015); and The Plan of College New Century Excellent Talents Program in Fujian Province (2016).