
Abstract
By analyzing the limitations of existing offset optimization models about coordinated signal systems and considering the random distribution of road travel speed, we obtain an offset optimization algorithm based on the multi-attribute decision-making method, in which road travel speed, delay, and queue length are considered. Finally, the algorithm is applied to a coordinated signal system and an analysis is conducted using SIMIO, a simulation tool. The results show that the optimized model improves the existing models for offset optimization of coordinated signal system.
Introduction
Signalized arterials carry a significant portion of traffic flow in urban traffic networks. Thus, urban arterial operation plays an important role in improving the network efficiency and easing traffic congestion. One of the most effective means of improving urban arterial operations is through signal coordination. Among the various signal timing parameters for coordination, offset is considered the most important one. The state of the research on offset optimization can be categorized into two types: the maximum green bandwidth method (MGBM) and the minimum delay method (MDM). 1
The MGBM is more widely used in practice and includes both analytical and graphical approaches. Due to simplified assumptions and the lack of considerations of many traffic flow factors, the result of its field application is not satisfactory. The MDM, on the other hand, takes into consideration many relevant traffic flow factors, which require complicated mathematical models and extensive computing time. As a result, its real-time application is somewhat limited.
Based on control theory and vehicle delay characteristics at intersections, Wan and Lu 2 developed an offset optimization model, which aimed at minimizing delay of vehicles in both directions. Liu and Yang 3 depicted a vehicle dispersion model using traffic density parameter. The offset was determined by forcing both vehicles to a stop, thus creating a domino effect onto the residual vehicles at the end as they reached the next intersection. Other studies4,5 considered the influence of cross streets and used generic algorithm to derive optimal offset with the objective function of minimizing delays and stops. These studies proved to be advantageous over traditional approaches by considering turning vehicles and platoon dispersion. Algorithms such as cellular automaton (CA), genetic algorithm (GA), and particle swarm optimization (PSO) were generally applied to solve these complex models.6–9
The approaches mentioned above presented improvements over the traditional methods to some extent; however, all of these methods assumed constant travel speeds. Meanwhile, the objective functions primarily focused on delay, queue length, or stops which cannot reflect the operational state of the traffic flow already past the stop line of an intersection, thus these approaches are not always practical. In coordinating signal systems, many parameters such as road segment length, traffic composition, travel speed, delay, and queue length should be comprehensively considered. Studies and field observations have shown that travel speed is time-varying and changes substantially.10,11
Regarding speed variations, Lv and Niu12,13 addressed the random nature of travel speed as well as the relationship between speed and offset. Based on information entropy theory and multi-attribute decision-making methodology, they developed an offset optimization algorithm with an objective function of weighting several measures including travel time, delay, and queue length. Simulation results demonstrated the effectiveness of the proposed method.
Because of the influence of travel time and road network information, which constantly change, a decision maker may have different views on the offset schemes. For example, according to the information entropy theory, an offset scheme may produce the best overall system performance; however, delays on certain movements may not be ideal. It is likely that the suboptimal offset schemes may result in more desirable delay or queue length, thus they might be chosen by decision makers in this case. 12 Because of the differences in how various performance measures are viewed by decision makers, different offset schemes can be selected and implemented. 13
This article improves over the existing methodologies by considering the differences in operating results of these indexes under different schemes. In order to reduce the bias between subjective preference of decision makers and the objective information, the random nature of travel speed is particularly considered. By analyzing the relationship between travel speed and offset, a single-objective optimization model is proposed, where different levels of attentions are given to the relevant indexes, including travel time, delay, and queue length. We obtain an optimal offset solution on the basis of multi-attribute decision-making methods and Lagrange multiplier method. 14 In the end, a simulation model named SIMIO is used to verify the validity of the method.
Multiple attribute optimization model
Description of the research problem
The main factors affecting coordinated signal systems include average speed of each road section, turning traffic from side streets, discrete characteristic of vehicle, and inhomogeneity of arriving vehicles. A coordinated signal system could completely fail if these factors are not given proper consideration.
Studies have shown that travel speed V, as a random variable, follows the normal distribution

Here, V is travel speed and u is the mean or expectation of the distribution. The parameter
The existing offset optimization models always assume that the travel speed is constant, which does not reflect actual field observations. The random variation of vehicle arrivals has shown to affect traffic signal settings.18,19 Consequently, the random variation of travel speed would most likely affect the offset value, which ultimately determines the efficiency of coordinated signal systems.
When offset optimization only considers vehicle delay, stops, or queuing length, it is limited to the performance and traffic state before the stop line. To overcome this limitation, travel time is another important measure, which can reflect the traffic performance beyond the stop line and the system as a whole. Therefore, in order to improve the efficiency and adaptability of coordinated signal systems, travel time, delay, and queue length should be comprehensively considered in offset optimization.
In order to identify different indexes that affect the modeling result, a preference value for each offset scheme is first given according to a multiplicative judgment matrix. Because there are errors between subjective and objective values of decision makers, a single-objective optimization model is established to minimize the error, and the model is solved by an analytic method called Lagrange multiplier method. 14 Finally, the multi-attribute decision-making method is used to obtain the optimal offset scheme by ranking the schemes based on the random characteristics of travel speed.
Model establishment
For a given travel speed distribution, a group of offset schemes
Let

Through simulation of each offset scheme, operation indexes can be obtained which include travel time, delay, and queue length. These operation indexes form the decision-making matrix



The preference values of each offset scheme, expressed by a multiplicative judgment matrix, are given by decision makers according to operational results, which are related to the travel speed distribution.
Definition 1
For matrix
There are four types of reciprocal scale in Table 1.
20
The judgment matrix, which is composed by one type of reciprocal scales, is the multiplicative judgment matrix according to Definition 1. In addition, the reciprocal scale is valid when the value is within the range. For example, 2, 4, 6, or 8 represent intermediate values on a 1–9 scale. If the reciprocal scale of scheme
Four types of reciprocal scale.

At first, the schemes
In order to achieve uniformity of the decision-making information, the synthetic attribution value of all schemes

where
If multiplicative judgment matrix
or

In this case, sorting methods of multiplicative judgment matrix such as the eigenvector method
21
can be directly used to get the priority vector of matrix
However, there are some errors between multiplicative judgment matrix

In order to minimize the errors, a single-objective model (10) is established to compute the index weight vector

No matter what values the variables in formula (10) take,

Let

Expanding formula (12) and taking

Let

Formula (13) can be transferred into the matrix form as shown below

Write

Combining formulas (14) and (15), an optimal solution is obtained by

If
Calculating steps
Step 1. Normalizing the decision-making matrix
Step 2. Making a pairwise comparison between two schemes
Step 3. Using formula (13) to compute matrix
Step 4. Using formula (17) to compute the optimal weight vector
Step 5. Computing the synthetic attribute value of each scheme
Step 6. According to
Numerical example
SIMIO was selected as a modeling tool for this study due to proven accuracy. 24 The true object-oriented design makes SIMIO to be easily extended, and the objects of SIMIO in the standard library offer a comprehensive modeling capability. The modeling objects in SIMIO are defined using graphical process flows that can be viewed and changed by the user.
Using SIMIO as a simulation tool in this study, a simulation model is established for a coordinated signal system that has four intersections. First, we compute the cycle and phase times of each intersection based on the methodology documented in the literature.18,19 Then, according to the random distribution of travel speed, we obtain the objective weight for each index and the two best schemes based on the information entropy and multi-attribute decision-making methods. 12 Finally, analyses of the offset schemes are done which correspond to different travel time, delay, and queue length. The optimal offset scheme is selected after a comparison of the schemes with the multiplicative judgment matrix.
Basic data of the coordinated signal system
A coordinated signal system of four signalized intersections is established to illustrate the analysis process. Each intersection has eight lanes (both directions) on the main street and four lanes on the minor street. The distances between each intersection are 350, 450, and 420 m, respectively. No midblock driveways and pedestrian crossings exist on the main street. Figures 1 and 2 show the system layout and intersection geometry.

The structure of coordinated signal system.
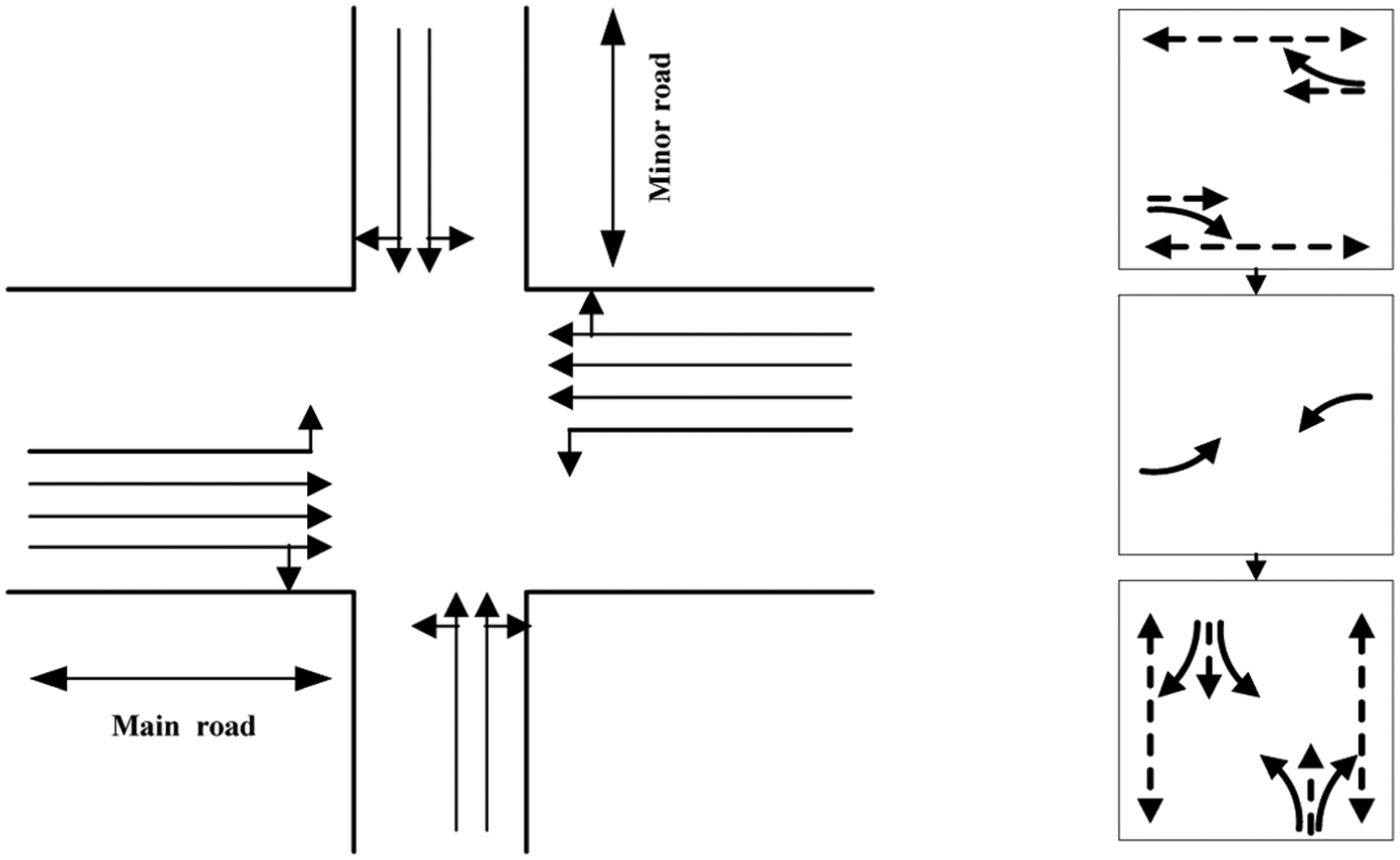
The graph of intersection channelization and phase scheme.
The parameters used in simulation are as described below:
All of the section length is more than 150 m and the maximum queue storage is 17 pcu when the section length is less than 150 m.
The traffic turning movement ratios of left-turn, through, and right-turn from intersections 1–4 are: 5%, 83%, and 12%; 6%, 81%, and 13%; 4%, 83%, and 13%; and 4%, 86%, and 10%, respectively. The turning movement ratios of left-turn, through, and right-turn are 2%, 87%, and 11% on all of the minor streets.
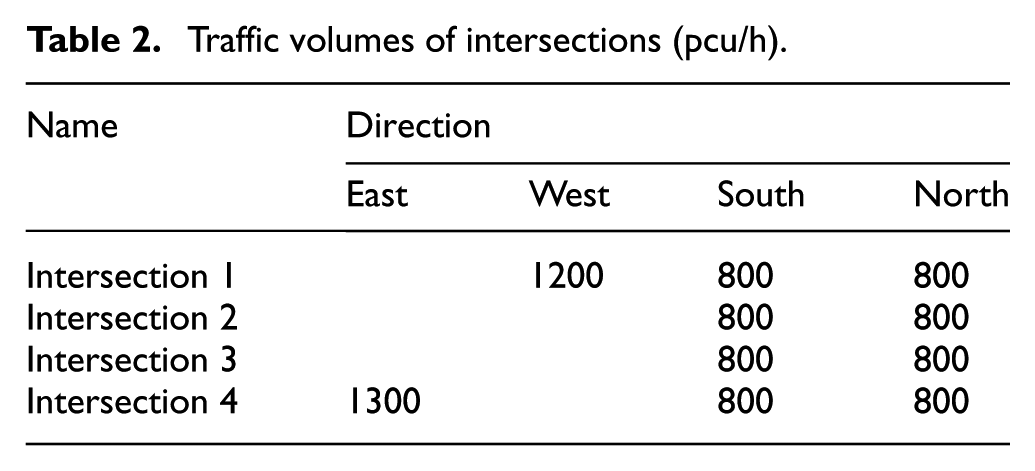
Three-stage signal control plan is used at these intersections with the through movement signal phases in Stage 1 being the coordinated phases. Intersection 1 is determined to be the critical intersection based on volume and geometric configuration. Meanwhile, we assume that all of the approaches have ideal conditions, that is, ideal saturation flow rates, and the cycle length for coordination is 80 s. Lost time per phase is 3 s without red clearance interval.
The traffic volumes for each intersection are shown in Table 2.
Traffic volumes of intersections (pcu/h).
Analysis of the simulation result
We assume that the mean travel speed of each section is 40 km/h but with three different standard deviations of 0, 5, and 10 km/h. A set of offset schemes is obtained first by traditional MGBM. After 50 simulation runs with SIMIO, we obtain the average operating indexes of the system including travel time, delay, and queue length.
In order to demonstrate the validity and practicability of the proposed method, we obtain the objective weight for each index and two of the best schemes using information entropy theory and multi-attribute decision-making methods when the standard deviation of travel speed is changed. 12 Then, decision makers give the preference values of each offset scheme, and the multiplicative judgment matrix is obtained. The optimal offset scheme is selected after a comparison of the schemes based on the synthetic attribution value of each scheme.
Results when travel speed is constant
When travel speed is assumed constant at 40 km/h, the two best schemes obtained by the information entropy and multi-attribute decision-making methods are shown in Table 3, and the operations indexes of each section and direction are listed in Table 4. When a decision maker has no subjective preference about these offset schemes, preference values of scheme 1 and scheme 2 are 0.9946 and 0.8210, respectively. At this point, operations result of scheme 1 is better than scheme 2.
Offset scheme when travel speed is constant (unit: s).

Operational indicators when travel speed is constant.

Next, we discuss how the proposed method is used to compute the synthetic attribution values of schemes and to obtain the optimal scheme by considering the differences among decision makers in their subjective preference.
Because there are two directions in arterial system, let
Step 1. Because travel time, delay, and queue length are cost-type index, we normalized the decision-making matrix
Step 2. A pairwise comparison between scheme 1 and scheme 2 is made according to the reciprocal scale which is selected from Table 1. With the data in Table 4, one regards scheme 2 being better than scheme 1 because the delay of scheme 2 is less than that of scheme 1, then the multiplicative judgment matrix
Step 3. By formula (14), we get the matrix
Step 4. By formula (17), we compute and get the optimal weight vectors
It can be clearly seen, when preference values of each offset scheme are different, the decision maker’s subjective judgment has an obvious influence on the offset scheme selection.
In Table 5, there are synthetic attribute values of each section and direction for two schemes. When a decision maker regards scheme 2 being better than scheme 1, the multiplicative judgment matrix
Calculation results of synthetic attribute values when the travel speed is constant.

Similarly, when the standard deviation of section travel speed is 5 km/h and the expectation of section travel speed is 40 km/h, the two best schemes obtained by information entropy and multi-attribute decision-making methods are shown in Table 6, and the operations indexes of each section and direction are listed in Table 7.
Offset scheme when the standard deviation of travel speed is 5 km/h.

Operation indicators when the standard deviation of travel speed is 5 km/h.

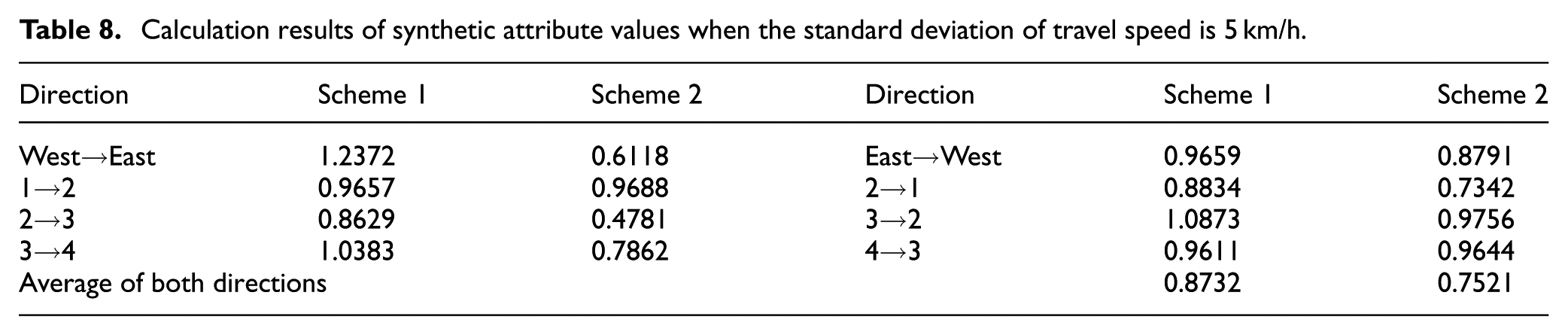
Similar to the case of constant travel speed, when the standard deviation of section travel speed is 5 km/h, the results are shown in Table 8, which includes the synthetic attribute values of each section and direction for two schemes.
Calculation results of synthetic attribute values when the standard deviation of travel speed is 5 km/h.
Travel speed is random with a standard deviation of 10 km/h
Similarly, when the mean travel speed is 40 km/h with a standard deviation of 10 km/h, the best two schemes which are obtained by information entropy and multi-attribute decision-making methods are shown in Table 9, and the operation indexes of each section and direction are listed in Table 10.
Offset scheme when the standard deviation of travel speed is 10 km/h.

Operation indicators when the standard deviation of travel speed is 10 km/h.

Similarly, when the standard deviation of section travel speed is 10 km/h, the synthetic attribute values of each section and direction for two schemes are shown in Table 1.
The following can be observed from Tables 5, 8, and 11:
When travel speed is random, the performance indexes, which run their own optimal scheme, are inferior to that of constant speed. This trend becomes more obvious as the standard deviation of travel speed increases.
When decision makers vary in their subjective judgment on a scheme’s performance, there are significant differences in the synthetic attribute values of schemes with and without preferences whether they are at the system level or the intersection level. For example, when travel speed has a standard deviation of 0 and 10 km/h, the scheme 2 is optimal if a decision maker is satisfied with the delay of scheme 2. When the standard deviation of travel speed is 5 km/h, the scheme 1 becomes optimal.
In the above calculation, delay is considered as the more important evaluation criteria; therefore, the role of delay is more obvious than other indexes. These results indicate that different preference values of the indexes or schemes have an obvious influence on the offset value, and different traffic management objective can lead to different control effect.
Calculation results of synthetic attribute values when the standard deviation of travel speed is 10 km/h.

From the above discussions, the simulation and computation results indicate that different concerns of decision makers about indexes or schemes have an obvious influence on the offset. Using the proposed methodology by the authors, we can obtain a relatively optimal offset scheme. Moreover, it shows that the random characteristics of travel speed have an obvious influence on offset. This phenomenon should be taken into consideration when developing coordination signal timing plans.
Summary and conclusion
By examining the limitations of existing offset optimization models for signal coordination, the authors propose a new offset optimization methodology, in which the random nature of travel speed is considered. Based on multi-attribute decision-making method, the algorithm is obtained. And a decision maker could give his or her preference on each scheme by considering travel speed, delay, or queue length. At the end, the methodology is applied to a coordinated signal system to demonstrate its effectiveness using SIMIO simulation.
Although the proposed methodology takes the travel speed as a random variable which follows a normal distribution, the type of distribution does not really affect its application. The method can not only be used in optimizing timing parameters of coordinated signal systems but also in evaluating existing signal timing plans. Future work would involve analysis of the relationship between offset and traffic operation schemes and traffic composition to optimize all relevant signal timing parameters such as cycle, split, and offset to fit the random characteristics of traffic arrivals and travel speed.
Footnotes
Academic Editor: Xiaobei Jiang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work described in the paper was supported by Natural Science Foundation of China (Nos 71261014, 61463026, and 61463027), Research the Fund for the Doctoral Program of Higher Education under Grant of China (No. 20136204120007), and the Natural Science Foundation of Gansu Province of China (No. 1308RJZA128).