
Abstract
A quantized flocking control for a group of second-order multiple agents with obstacle avoidance is proposed to address the problem of the exchange of information needed for quantification. With a reasonable assumption, a logarithmic or uniform quantizer is used for the exchange of relative position and velocity information between adjacent agents and the virtual leader, moving at a steady speed along a straight line, and a distributed flocking algorithm with obstacle avoidance capability is designed based on the quantitative information. The Lyapunov stability criterion of nonsmooth systems and the invariance principle are used to prove the stability of these systems. The simulations and experiments are presented to demonstrate the feasibility and effectiveness of the proposed approach.
Introduction
The flocking of a group of autonomous agents is currently a significant research subject in the field of multiple-robot cooperative control. Reynolds 1 introduced three heuristic rules to describe biological flocking: (1) separation: avoid collision with nearby group mates, (2) alignment: attempt to match velocity to that of nearby group mates, and (3) cohesion: attempt to stay close to nearby group mates.
Many variants based on these three rules have been proposed over the years. A Lyapunov-based approach was considered in Hong et al.
2
for switching the joint interconnection of an agent group. Graph theory was used to analyze the consensus problems of agents in Olfati-Saber and Murray.
3
The theoretical framework for the design and analysis of distributed flocking algorithms was presented in Olfati-Saber
4
by designing an artificial potential for
Because agents are distributed and constrained by their limited sensing capabilities, they must rely on digital communication channels to obtain the needed information, and quantization is one of the basic limitations induced by finite bandwidth channels. This limitation has motivated an increasing interest in the use of quantized measurements to design effective coordination control strategies. In Dimarogonas and Johansson, 11 the spectral properties of the incidence matrix of the communication graph were exploited to study the convergence properties of a multi-agent network with quantized communication in continuous systems. For a team of mobile agents with second-order dynamics, a new set of tools, including new forms of the Lyapunov functions, was used to study how different quantizers affect the performances of consensus-type schemes to achieve synchronized collective motion. 12 In Ceragioli et al., 13 two quantization rules were considered: a uniform static quantizer and a hysteretic quantizer, which were designed to cope with the undesired chattering phenomena and study the convergence properties of the dynamics resulting from a hybrid system approach. In Chen et al., 14 the quantized consensus problem of continuous-time second-order multi-agent systems via sampled data was addressed, and a necessary and sufficient condition on the sampling period and design parameters was obtained.
However, the above research works did not investigate the flocking control of second-order multi-agent systems based on quantitative information. Specifically, obstacles were ignored, and thus, the obstacle avoidance feature was not addressed. There are two objectives in this article. The first objective is to extend the above research works to the flocking algorithm with the quantitative information regarding the relative position and velocity between neighboring agents. The second objective is to verify the flocking algorithm with obstacle avoidance when only a minority of the agents are informed regarding obstacle information. Through both mathematical analysis and numerical simulation, we show that a group of agents form a flock under exchange information quantized by a uniform or logarithmic quantizer condition. Furthermore, we apply these techniques to the problem of guaranteeing stable flocking of NAO humanoid robots whose model are used in the RoboCup 3D Simulated Soccer League.
Preliminaries and problem formulation
Filippov solutions
We consider the vector differential equation

where

then the Filippov solutions of equation (1) are as follows.
Definition 1
A vector function x is called a solution of equation (1) on

where

and N is the set of x at which f is discontinuous;
Lemma 1
If

Definition 2
The generalized directional derivative of f at x in the direction

if
Definition 3
If

Lemma 2
Let

where

Lemma 3
Let
Problem formulation
We consider a team of

where

with
Quantized flocking control with obstacle avoidance
In Zhang et al.,
6
a general alignment repulsion algorithm for the flocking of multi-agent systems was proposed, and the controller

where

and

where
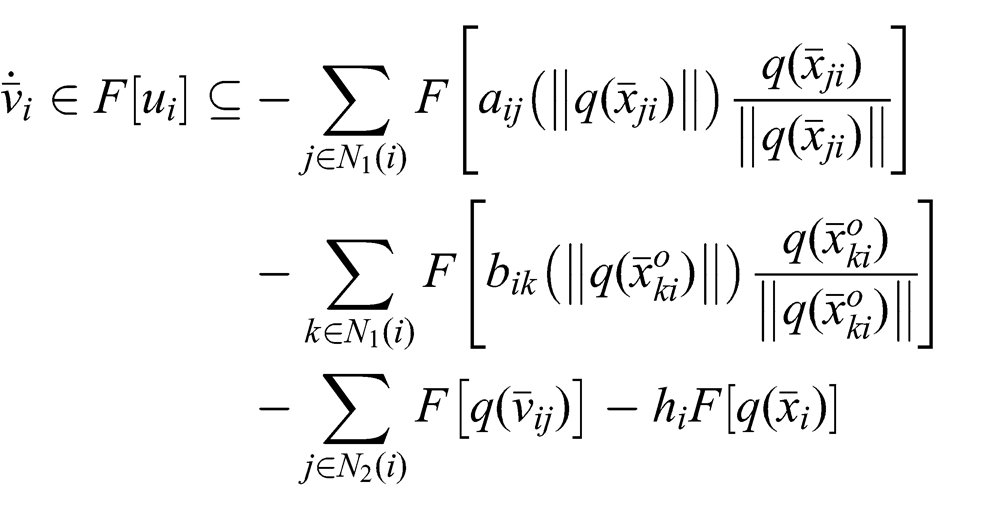
In this article, we consider the scenario in which for each individual, the relative velocity and position information of its neighbors are acquired through digital communication. Thus, we have the control signals in the following form

where

where
In this section, we assume that only some, not all, of the agents are informed agents who have the position information regarding the virtual leader.
We have assumed that all the individuals have been installed with identical quantizers. We consider the following two types of quantizers. The uniform quantizer we used is a map

where
The logarithmic quantizer we used is an odd map

For any
Denote the position difference vector and velocity difference vector between agent i and the virtual leader as

Let

Hence, the control protocol for agent i (12) can be rewritten as

To state the main results of this section, we define the potential and kinetic energies of the group as follows

where



When two agents i and j collide, that is,

When agents i and obstacle k collide, that is,

Theorem 1
Consider a system of N mobile agents and a virtual leader with dynamics (9) and (10). Assume that
In the case of logarithmic quantizers
In the case of uniform quantizers
Proof
In view of Lemma 2, it follows that

where

Additionally


Applying Lemma 1, one has
Then, function (19) can be further computed as

From Definition 1, we can further deduce that

This implies that

From function (17), one has

that is,
Furthermore, from function (17), we have

Then, one has
From equations (17) and (21), it is clear that

hence,

is a compact set. Then, it follows from Lemma 3 that all trajectories of the agents that start from

in the closure of

When the logarithmic quantizers (14) are used, it follows that
When the logarithmic quantizers (13) are used, from
Simulation and experimental results
A simulation on six agents moving in a two-dimensional space was performed in MATLAB. The logarithmic quantizers
The initial velocities and positions of the six agents were chosen randomly from the boxes
Some simulation results are shown in Figures 1 and 2. In the figure, there are six agents marked with circles; the solid lines represent the neighboring relations, the solid lines with arrows represent the velocities, and the star represents the virtual leader. The positions and radius of the obstacle are

Initial state of multi-agent systems.
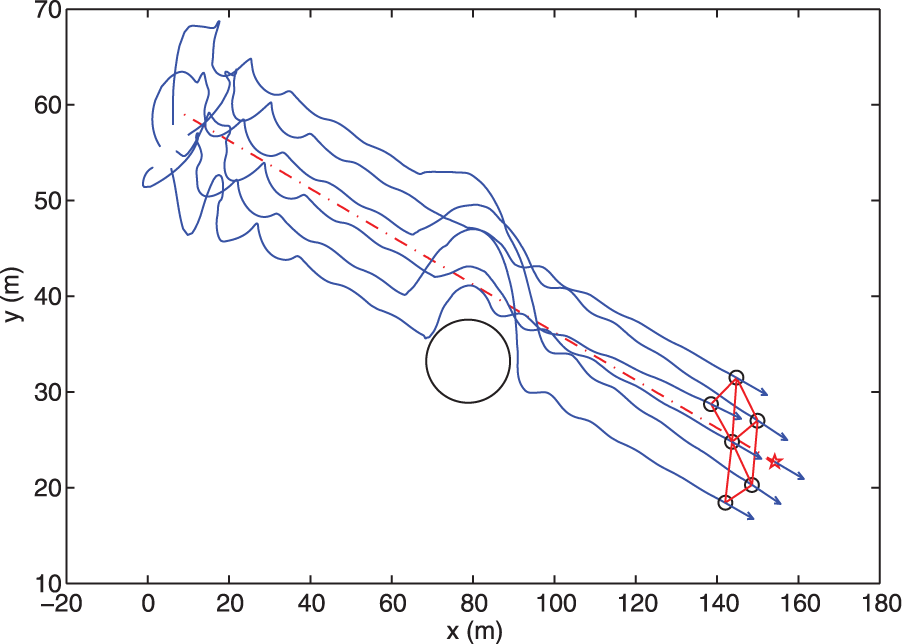
Trajectories of the multi-agent systems applying control input (12) with obstacle avoidance.
The NAO humanoid robot was produced by Aldebaran Robotics and has 25 degrees of freedom, a height of approximately 0.57 m, and a weight of approximately 4.5 kg. The robot model used in the RoboCup 3D Simulated Soccer League is currently NAO. The CIT3D team, which was built by our laboratory, has taken part in several RoboCup 3D soccer simulation competitions and won world runner-up of the RoboCup (once), third place of RoboCup IranOpen (once), runner-up (twice), and second runner-up (four times) in the RoboCup ChinaOpen. The walking pattern generation of the CIT3D team was based on the three-dimensional (3D) linear inverted pendulum model (LIPM)19,20 and preview control.21–23 Stable bipedal walking has been successfully realized in the CIT3D team.
Based on the source code of the CIT3D team, an experiment of humanoid robot flocking behavior with obstacle avoidance was performed in the RoboCup 3D soccer simulation environment. The dimensions of the soccer field are 30 × 20 m, as shown in Figure 3.

Dimensions and coordinate system of the soccer field.
Eleven blue NAO robots were placed randomly on the left side of the soccer field, while initial velocities of there robots were set to

Snapshot of initial state of the experiment of humanoid robot flocking behavior with obstacle avoidance.
Figure 5 shows that the flocking of these 11 blue NAO robots was achieved by applying control input (12). Figures 6 and 7 show that these 11 blue NAO robots walked through these two obstacles based on flocking behavior with obstacle avoidance. Figure 8 shows that after avoiding obstacles, the team of 11 blue NAO robots reached the destination. The formation of these 11 blue NAO robots was again achieved.

Snapshot at 17.4 s.

Snapshot at 39.4 s.
Snapshot at 57.4 s.

Snapshot at 82.6 s.
Conclusion
In this article, the flocking control with obstacle avoidance problem has been considered for second-order agents under quantized communication. A distributed protocol has been proposed based on the exchange of the quantitative relative position and velocity between neighboring agents. It was shown that for an initial connected network, with the proposed distributed protocol, flocking with obstacles avoidance was achieved using quantitative information exchange between each pair of adjacent agents at each time step.
Footnotes
Academic Editor: Long Cheng
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.