
Abstract
The optimal control of fractional-order active isolation system is researched based on the optimal control theory, and the effect of fractional-order derivative on passive isolation system is also analyzed. The mechanical model is established where viscoelastic features of isolation materials are described by fractional-order derivative. The viscoelastic property of the fractional-order derivative in dynamical system is studied and the fractional-order derivative could be divided into linear stiffness and linear damping. It is found that both the fractional coefficient and the fractional order could affect not only the resonance amplitude through the equivalent linear damping coefficient but also the resonance frequency by the equivalent linear stiffness. Based on optimal control theory, the feedback gain of fractional-order active isolation system under harmonic excitation is obtained, which is changed with the excitation frequency. The statistical responses of the displacement and velocity for passive and active vibration isolation systems subjected to random excitation are also presented, which further verifies the excellent performance of fractional-order derivative in vibration control engineering.
Introduction
The concept of fractional-order derivative was first presented by Hospital and Leibniz in the late 1600s. Because there was no support of physics, mechanics, and other background disciplines, fractional-order derivative was merely studied as a purely theoretical question of mathematics. After 300 years of development, many scholars had tried their best to study the definition, approximation calculation, mathematical properties, and application of fractional-order derivative,1–6 and fractional-order optimal control problems had been paid more and more attention.7–11 In recent years, the field of the fractional-order derivative has attracted interest in several areas including physics, chemistry, engineering, and even finance and social sciences.12–17 It has received an increasing interest due to the fact that fractional-order derivative could reflect a lot of natural phenomena more reasonably.
In the engineering problems, fractional-order derivative was generally introduced into the control system, so that it could improve the control performance and robustness of the system. The fractional-order derivative can also be used to describe viscoelastic features of advanced materials or dissipative forces in structural dynamics18,19 and the processes with power-law memory.
20
In 1991, VE Tarasov
21
proposed a dynamical system governed by fractional-order differential equations, which could be considered as an open (non-isolated) system with memory. It had been found that fractional-order derivative was more appropriate than traditional integer-order counterpart in describing the viscoelastic constitutive relation through numerous studies in recent years. The concept of fractional-order derivative was used in the development of a force–displacement relationship for viscous dampers by Oldham and Spanier
22
in 1974. And the fractional-order derivative within the context of viscoelasticity was used as early as 1936 by Gemant,
23
who first proposed the fractional-order derivative models for viscoelastic materials. In 1991, Makris and Constantinou
24
proposed a fractional-derivative Maxwell model for viscous dampers, and recently, Liu et al.
25
proposed a fractional-derivative Bingham model for magnetorheological (MR) damper. All this suggested that fractional-order derivative could be used in modeling of the viscoelastic materials, and generally, the fractional-order derivative could demonstrate both stiffness and damping effects. Accordingly, the force–displacement relationship of viscoelastic materials in vertical motion could be expressed as
Analytical research on fractional-order system is important. Recently, Shen et al.14–16,26 obtained approximately analytical solutions of some fractional-order dynamical systems based on averaging method, and they verified that fractional-order derivative should be considered as a damping and stiffness factor simultaneously in dynamical system. Optimal control theory for the integer-order isolation system had acquired more mature development, and the implementation methods for optimal control had been provided in some literatures.27–31 However, only limited work has been done in the area of fractional-order systems optimal control.7–11 Because the calculation of fractional-order derivative was very complex, many scholars had adopted numerical method,5,6,9 which was another main direction of study on fractional-order derivative.
In this article, the object is the optimal control of a fractional-order active isolation system. The dynamical model is established in section “Dynamic modeling of fractional-order active isolation system.” The damping and stiffness of fractional-order isolation system will change with the excitation frequency, which is different from the traditional integer-order isolation system, so that the feedback gain will also change with the excitation frequency. It is difficult to deal with fractional-order derivative when studying fractional-order system by optimal control theory. Based on the heuristic level in Shen et al.,14–16,26 the fractional-order derivative is studied in section “Processing of fractional-order derivative.” The optimal control aim is to minimize the displacement and velocity amplitude with different excitation frequency. Fractional-order passive and active isolation systems are analyzed in sections “Analysis on fractional-order passive vibration isolation system” and “Analysis of fractional-order active isolation system,” respectively. Finally, in order to further illustrate the control performance, the response of active isolation system is compared with that of passive isolation system subjected to random excitation. The results show that active vibration isolation system can theoretically reach the designed control target and provide a simple idea for optimal control of the fractional-order dynamical system, which could be used to solve similar problems in engineering applications.
Dynamic modeling of fractional-order active isolation system
In this article, the study object is a single degree-of-freedom fractional-order active isolation system shown in Figure 1. According to Newtonian second law, one could obtain the motion differential equation


Mechanical model of single degree-of-freedom isolation system.
where m,
In order to use optimal control theory to find the explicit form of the optimal control force, equation (1) should be rewritten as the form of state equation. Considering state vector as

one could obtain the system state equation

where H is the function of state vector X.
The main objective of vibration isolation is to minimize the displacement and velocity, so that the controlled performance indicators can be selected as

where

one can establish another form of the objective function as

Different from traditional integer-order isolation system, this system contains fractional-order derivative. In order to get the explicitly optimal control force u by calculus of variations, first, the fractional-order derivative must be processed.
Processing of fractional-order derivative
Here, Caputo’s definition is adopted

where
When it is in different form, the approximate expansion of the fractional-order derivative of
is a trigonometric function
When

where

Assuming that

Differentiating equation (6), one can obtain

Introducing the two formulae 11


one can get

Differentiating equation (7), one can obtain

Because equations (10) and (11) are equal, the following results could be established



When

is a periodic function
For a periodic function satisfying Dirichlet condition, one can assume its period as T

The Fourier series expansion of equation (14) is

where


where

Therefore,
Moreover, using a finite number of terms in equation (18), one could get

where


Obviously, the general periodic functions also satisfy the same property as trigonometric function.
Analysis on fractional-order passive vibration isolation system
Simplification of passive control system
For passive control system, equation (1) can be rewritten as

Defining two new parameters, that is, equivalent damping coefficient and equivalent stiffness coefficient 26


one could study the dynamical property of fractional-order passive vibration isolation system. From equations (20) and (21), it can be seen that fractional-order derivative has viscoelastic characteristics, which means it has not only the damping effect but also the stiffness effect. The effects of fractional-order derivative on dynamical response are related with the fractional coefficient
Steady-state solution and stability analysis
Substituting equation (21) into equation (20) and rewriting it in the plural form, one can obtain

The characteristic equation of equation (22a) is

The characteristic roots are

Due to

the real parts of the characteristic roots are always less than 0. That means the solution of equation (22a) is always stable.
Assuming that the steady-state solution of equation (22a) can be written in the following form

Substituting it into equation (22a), the steady-state amplitude can be obtained

The phase–frequency curve equation is

Equation (24) can be rewritten as

Defining

Based on equation (27), one could easily find the relationship between the amplitude amplification factor
Numerical simulation
In order to study the effect of fractional-order derivative on the system, one could consider denominator of equation (27)

Because the resonance has maximum impact on the system, we mainly research the influence of fractional-order derivative on resonance. The resonance point is the extreme point of equation (28), so that we discuss the extreme points in equation (28).
We take the first-order partial derivative of equation (28), and let it be equal to 0

Then, one can take the second-order partial derivative of equation (28)

When any set of
One could research equation (20) and select the basic parameters as

Effect of fractional order p on the amplitude–frequency curves.
From the observation of Figure 2, it could be found that

Effect of fractional coefficient
Analysis of fractional-order active isolation system
Optimal control force of single degree-of-freedom active isolation system
Under harmonic excitation, fractional-order derivative can be written as equation (13). We substitute it into equation (1) and omit higher order infinitesimal, so that equation (2b) can be written as

where



Based on optimal control theory, there is a real symmetric matrix E satisfying the Riccati equation 27

The analytical expressions of E can be obtained using computation software, such as Mathematica. From the expression form, we can see that even if the other system parameters are fixed, the matrix E will change with the excitation frequency. However, with the one excitation frequency, there is a unique optimal control force as

Numerical simulation of fractional-order active isolation system
We take a set of system parameters, including the system quality m = 30 kg, stiffness coefficient


where


From equations (35) and (36), it could be found that the system feedback gain is a function of the excitation frequency

Relationship between

Relationship between
After obtaining the feedback gain, one could research the performance of the fractional-order active isolation system. Theoretically speaking, the active isolation system is to add appropriately parallel spring and damper to the original passive isolation system. The change rule about the added stiffness and the damping coefficients are shown in Figures 4 and 5, respectively. We compare the amplitude–frequency curves of the passive isolation system and the active isolation system under different fractional order and could analyze the effect of active control force on control performance. Because the isolation system is subjected to harmonic excitation, the displacement amplitude is proportional to the velocity amplitude. One can find the optimization effect by comparing the amplitude–frequency curve of the displacement only. When the fractional order p is, respectively, taken as 0.25 and 0.5, the amplitude–frequency curves are shown in Figures 6 and 7. When

Amplitude–frequency curve for fractional order p = 0.5.
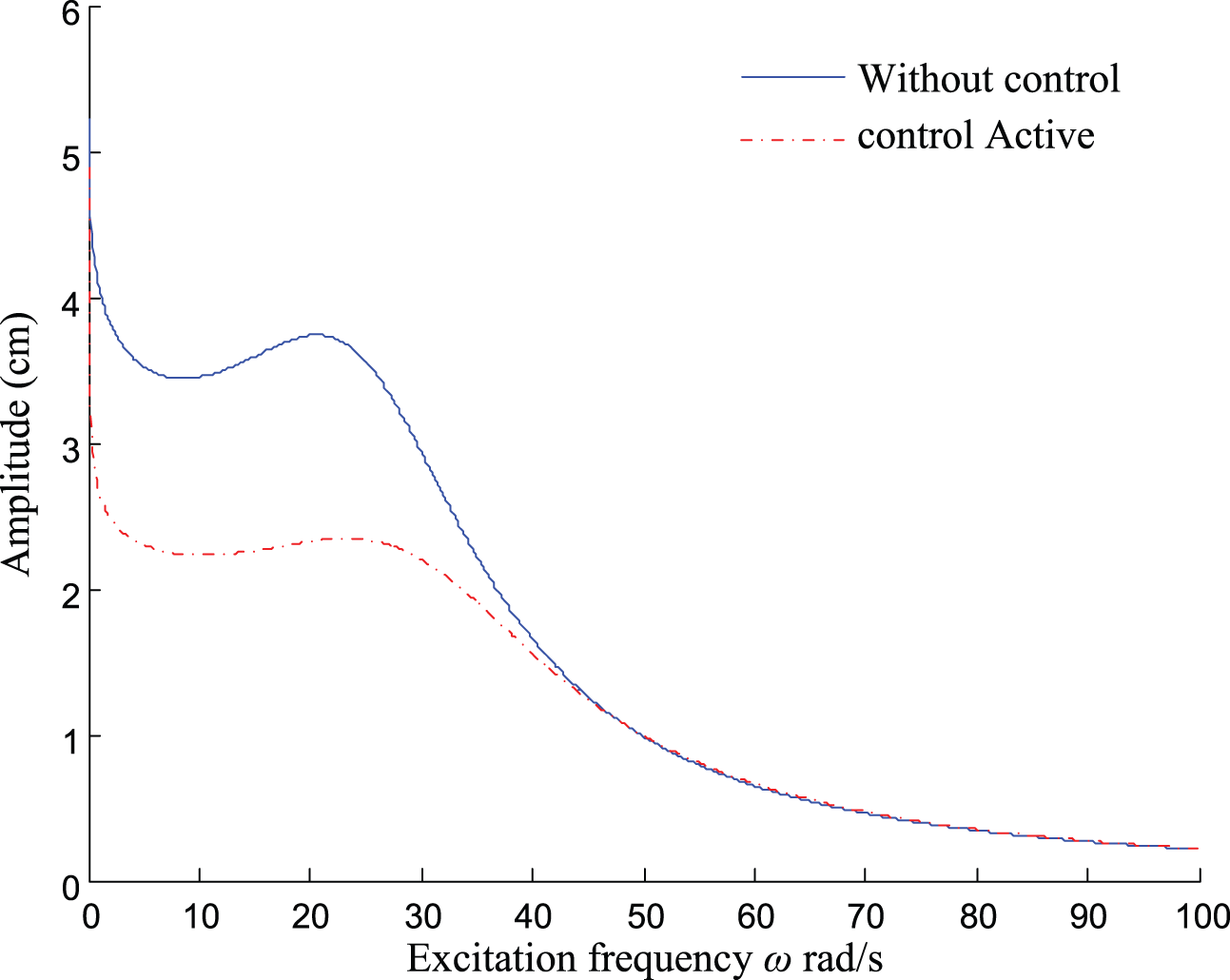
Amplitude–frequency curve for fractional order p = 0.25.
In practical engineering, the isolation system may be subjected to random excitation more frequently. Therefore, one should also analyze the control performance of isolation system under random excitation. In this article, we research the control effect of the optimal control force when the isolation system is subjected to random excitation. From equation (29), we can obtain the resonance frequency

System response of passive isolation system.
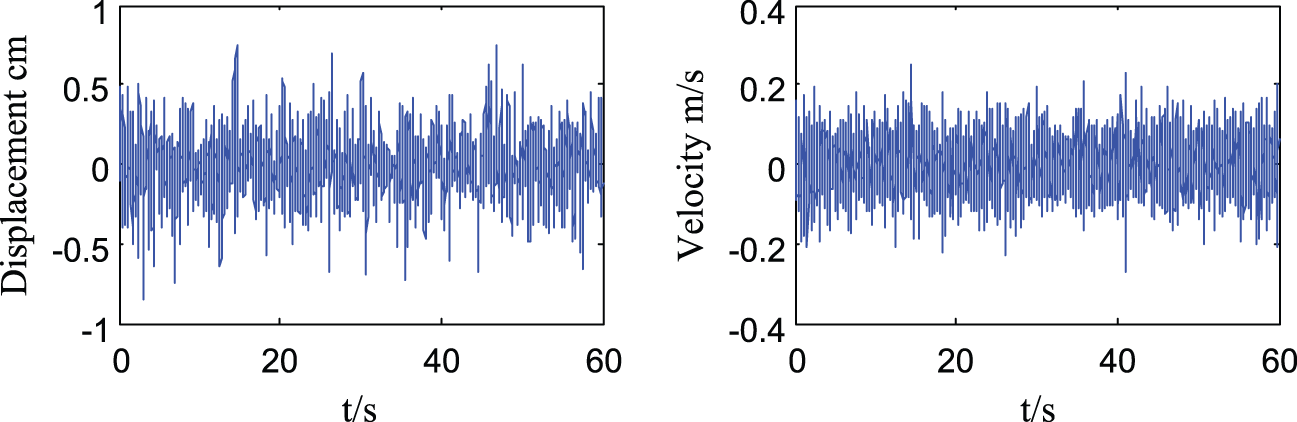
System response of active isolation system.
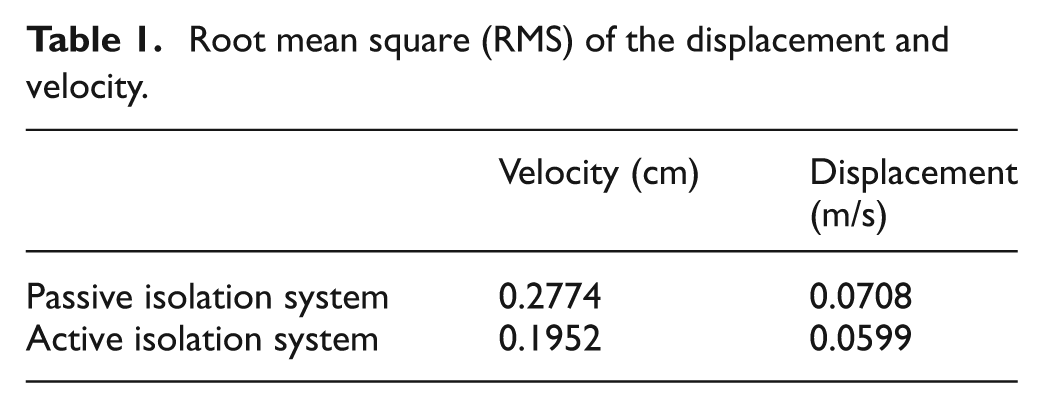
Root mean square (RMS) of the displacement and velocity.
Conclusion
In this article, we reasonably deal with the fractional-order derivative and study the effect of fractional-order derivative on passive isolation system. It can be clearly found that the effect of the fractional order and fractional coefficient on the system response could be characterized by the equivalent damping coefficient and equivalent stiffness coefficient, and they could affect the resonance frequency and resonance amplitude. After processing the fractional-order derivative, the system optimal feedback gain is obtained based on the optimal control theory. It could be found that the optimal feedback gain will change with the excitation frequency. Finally, we study the control effect through numerical simulation, and the simulation results show that this method can improve the performance of isolation system, whenever the isolation system is subjected to harmonic excitation or random excitation. This article provides a guideline for dealing with fractional-order derivative in vibration isolation system and also provides a simple and easy method for solving the similar engineering problems.
Footnotes
Academic Editor: Xiao-Jun Yang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors are grateful to the support by the National Natural Science Foundation of China (no. 11372198), the Cultivation plan for Innovation team and leading talent in Colleges and universities of Hebei Province (LJRC018), the Program for advanced talent in the universities of Hebei Province (GCC2014053), and the Program for advanced talent in Hebei (A201401001).