
Abstract
Aiming at balancing and positioning of a new electro-hydraulic servo system with iso-actuation configuration, an extended state observer–based fractional order proportional–integral–derivative controller is proposed in this study. To meet the lightweight requirements of heavy barrel weapons with large diameters, an electro-hydraulic servo system with a three-chamber hydraulic cylinder is especially designed. In the electro-hydraulic servo system, the balance chamber of the hydraulic cylinder is used to realize active balancing of the unbalanced forces, while the driving chambers consisting of the upper and lower chambers are adopted for barrel positioning and dynamic compensation of external disturbances. Compared with conventional proportional–integral–derivative controllers, the fractional order proportional–integral–derivative possesses another two adjustable parameters by expanding integer order to arbitrary order calculus, resulting in more flexibility and stronger robustness of the control system. To better compensate for strong external disturbances and system nonlinearities, the extended state observer strategy is further introduced to the fractional order proportional–integral–derivative control system. Numerical simulation and bench test indicate that the extended state observer–based fractional order proportional–integral–derivative significantly outperforms proportional–integral–derivative and fractional order proportional–integral–derivative control systems with better control accuracy and higher system robustness, well demonstrating the feasibility and effectiveness of the proposed extended state observer–based fractional order proportional–integral–derivative control strategy.
Keywords
Introduction
Large pipe weapons, arms of heavy machineries, industrial robotics, and space-borne manipulators possess a sort of long and heavy linkages which have high ratio of length to diameter and time-varying unbalancing torque induced by the misalignment between its gravity center and the corresponding trunnion. The unbalancing torque serving as a sort of strong disturbance highly deteriorates control performances of the system.1,2
Currently, there are two kinds of system balancing strategies, namely, the external force-based system balancing and the internal driving-based system balancing. The external methods mainly depended on adopting proper balancing weights or adopting balance machinery, and the static unbalancing components can be well compensated. Practically, the unbalancing part including partial static and dynamic unbalancing components was treated as external disturbances and further compensated by actively controlling the system. Regarding the feature of large diameter of the pipe, the unbalancing components were heavy, highly challenging the control system for positioning.3,4 Moreover, the extra-machinery for balancing strongly increased weights and costs of the corresponding mechanical systems and is being difficult to finely meet the lightweight requirements. With internal driving-based system balancing methods, the most direct way was to utilize the driving force for system balancing.5,6 Essentially, the currently adopted method based on direct driving was a feedforward inverse compensation strategy, and it cannot achieve real-time balancing. Besides, it was obvious that the driving force provided by the motor servo system is not large enough in terms of the heavy pipes. Another kind of adaptive balancing method combining the hydraulic accumulator and balancing machinery was recently developed by Han. 7 However, only partial of the unbalancing forces can be compensated during the process. Also, this method cannot be applied for active rejection of the unbalancing forces during the positioning.
However, there are certain extremely complicated segments with strong nonlinearities in large pipe-based gun control systems, including time-varying parameters induced by varying working conditions, external random loads, and complex friction forces between the cannon and trunnion. To eliminate these nonlinearity-induced undesired effects, a dominant method is the application of the well-known proportional–integral–derivative (PID) control strategy.8,9 The PID control is widely applied to mechanical and electrical control systems, which shows great control performance.10,11 However, due to the inherent nonlinearities existing in the control system as mentioned above, it is difficult for the linear PID control strategy to achieve excellent control behaviors, and consequently the unsuitable PID controller may significantly limit its dynamic performances. Facing this dilemma, a more robust and efficient control method should be further explored for the gun control system.
Fractional order proportional–integral–derivative (FOPID), which was first proposed by Podlubny, is the extended version of conventional integer order proportional–integral–derivative (IOPID), 12 which possesses unique characteristics of infinite dimensions, memory effects, and low sensitivity to external disturbances. Moreover, abundant dynamics, high robustness, and fine tracking accuracy of control systems can be obtained by applying the FOPID.13–16 Although the FOPID controller is much less sensitive to external disturbances, deteriorated tracking accuracy can also be observed when facing much larger disturbances and stronger nonlinearities.
In active disturbance rejection control (ADRC) system, one can use the output of the extended state observer (ESO) for the estimation of un-modeled dynamics and external disturbances of the control system with compensations.17–19 In Gao et al. 3 and Zhou et al.,20,21 ADRC was applied to gun control systems to achieve high control performance. However, due to a variety of adjustable parameters in the ADRC, it can only be used when appropriate parameters are selected for a specified control system. It suggests that optimal selection of the adjustable parameters highly restricts the practical application of the ADRC.
Taking advantages of the ESO and the FOPID, a novel ESO-based FOPID controller is introduced for the electro-hydraulic servo (EHS) system to achieve iso-actuation balancing and positioning of the gun control system. In this system, the FOPID is used to generate the master control commands, while the compensation command is estimated by the ESO.
To sum up, this article designs a new FOPID controller by synthesizing the ESO, which is then applied to the high precision control of the novel iso-actuation balancing and EHS system. Through the simulation and practical tests, the control performance and characteristics of the extended state observer–based fractional order proportional–integral–derivative (ESO-FOPID) controller are studied systematically, which also validate great control effect of the proposed control strategy.
EHS system with iso-actuation balance and positioning
Structural and working principle of the EHS system
Schematic of the hardware configuration of the EHS system with iso-actuation balancing and positioning is shown in Figure 1. The system mainly consists of a positioning controller, a variable pump, a proportional servo valve, a rotating transformer, a resolver-to-digital converter (RDC) module, a balancing controller, a quantitative pump, a proportional pressure reducing valve, a pressure sensor, and a power hydraulic cylinder with three chambers, namely, the upper chamber, lower chamber, and balance chamber, of which the upper and lower chambers are collectively known as the driving chamber.

EHS system for iso-actuation balancing and positioning.
The balancing controller is used to compare the deviation between the actual and expected pressures of the balancing chamber measured by a pressure sensor. Based on the pressure deviation, a control command is generated which has an effect on the proportional pressure reducing valve to adjust the pressure inside the balancing chamber. This pressure takes action on the barrel load through the piston cylinder, dominated by active balance for loading on gravitational torque. The positioning controller is used to compare the error between the actual and desired positions of the barrel measured by the rotational transformer. According to the positioning error, the calculated control command has an effect on the proportional servo valve to control the volume and direction of hydraulic fluid flow into the upper and lower chambers, so as to realize accurate positioning of the barrel. If the barrel loading deviates from the given position induced by the interference from disturbance or shock torque in positioning control, the positioning controller can be further used to estimate the disturbance, and the offset voltage is generated for the barrel loading stabilized in a given position.
Mathematical model of EHS system
The system state variable is set as

where

where C is a known constant. In addition, θ is the actual position value of the barrel, u1 is the output voltage of the positioning controller, βe is the elastic modulus of the effective bulk, Ct is the total leakage coefficient, G is the load elastic stiffness, J is the rotational inertia, V0 is the volume of a chamber, De is the equivalent displacement, Bm is the viscous damping coefficient, K1 is the current-flow amplification coefficient, Ka is the servo amplifier gain, and TL is any external load torque.
It is to be noted that in the EHS system, system leakage coefficient Ct, oil viscosity damping coefficient Bm, equivalent displacement De, and moment TL all change over the working state, that is, f(x), g, and d(t) parameters present time variability.
Control principle of EHS system
Balancing control principle
Any external loading torque TL can be mainly regarded as a combination of unbalancing torque, external disturbance torque, and launching shock torque. The commonly used methods for overcoming unbalancing torque include counterweight balancing and machine structure–based balancing which were mixed by three-chamber hydraulic cylinder and accumulator as proposed by Han. 7 Counterweight balancing is only able to ensure balancing in a smaller angle range, while it may greatly increase system weights. The machine structure–based balancing can only compensate for a part of the unbalancing forces. In principle, unbalancing disturbances inevitably exist in moving process of the barrel.
The principle of active balancing is that the gravity torque varies with the actual position of barrel
The working frequency of the proportional pressure reducing valve is significantly greater than the natural frequency of the hydraulic actuator, which can be approximated as a proportional link. Thereby, the relationship between the control voltage of the proportional pressure reducing valve

where
The theoretical pressure
where
By controlling the voltage
Positioning control principle
Generally, there is components featuring certain randomness in the values and action time of external disturbance torque and launching shock torque. Thus, the FOPID is adopted for the feedback control of the positioning system. Furthermore, the ESO is used for online compensation for external disturbances, resulting in much stronger robustness of the control system.
Controller design
Balancing controller
The balancing controller is developed based on the common PID. Consequently, the required pressure for the balancing chamber is

where
Positioning controller
Fractional order calculus
Let
where
The FOC operator is realized mainly through the definitions of Grünwald–Letnikov (G-L) and Riemann–Liouville (R-L).
FOPID controller
The general form of the FOPID controller is

In the time domain, the control signal

The classical IOPID controller is a special case of FOPID controller by adopting
Parameter design of fractional order controller
For the controlled object in the actual situation, the desired amplitude margin


where

while

Then,




The following are then satisfied


For a given system, the desired amplitude margin and phase margin were given based on the required performances. Thus, there are four equations and five variables (λ, µ, KP, KI, KD). The parameters can be determined by adopting the following square error minimization in time domain

For the given orders of the FOPID, the controller coefficient can be accordingly determined by



By combining equations (18)–(21), the parameters for the FOPID can be optimally determined in terms of both optimal requirements in time and frequency domains.
ESO
The key issue in the ADRC control is to estimate the system modeling errors and external disturbances as the “total disturbance” for compensation. The nonlinear structure is used in ESO to comprehensively estimate the un-modeled errors and external disturbances. In the ESO, four signals are generated by system output
The fourth-order ESO discretization equation is then determined by
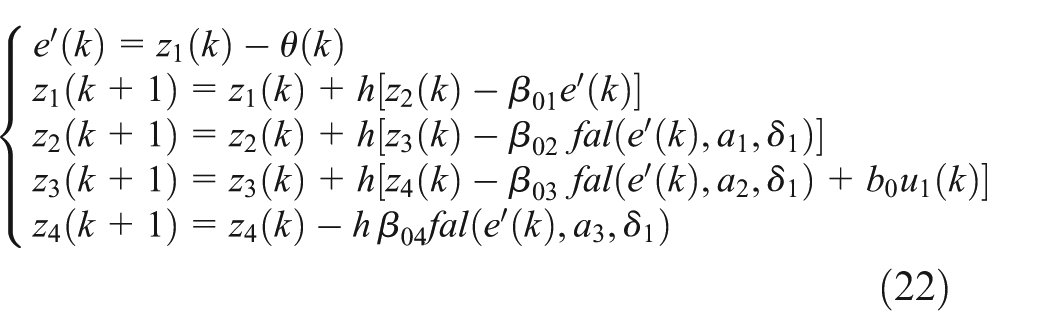
where the nonlinear function

where h is the integration step;
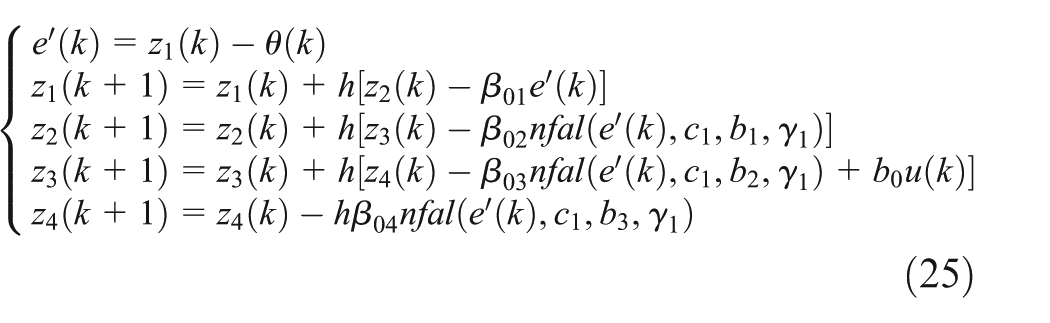
When equation (22) is used to process the estimation, the nonlinear function

where c controls the shape of
The fourth-order ESO discretization equation can accordingly be improved to
ESO-based FOPID controller
The ESO is introduced and synthesized with the FOPID control, the corresponding system configuration is illustrated in Figure 2.

System configuration of the ESO-FOPID controller.
In Figure 2,

Simulation and bench test results
To investigate performances of the designed EHS system with iso-actuation balancing and positioning, as well as the feasibility and superiority of the proposed ESO-FOPID control strategy, the test bench of the EHS system with iso-actuation balancing and positioning was conducted. Although the loading mass and sizes are much smaller than that of the actual barrel, they may provide beneficial references for principle demonstration of large barrel–based guns with iso-actuation balance and positioning control.
Main parameters of the developed EHS system are
The parameters for the balancing controller are
With numerical simulation, performances in step response and constant speed tracking of the control system are compared to investigate the dynamic and static characteristics using the IOPID, FOPID, and ESO-FOPID controllers.
Numerical simulation
Step response
The step response without varying rotational inertia is shown in Figure 3(a), in which no overshoots are observed for both IOPID and FOPID control systems, and the times for entering the error tolerance
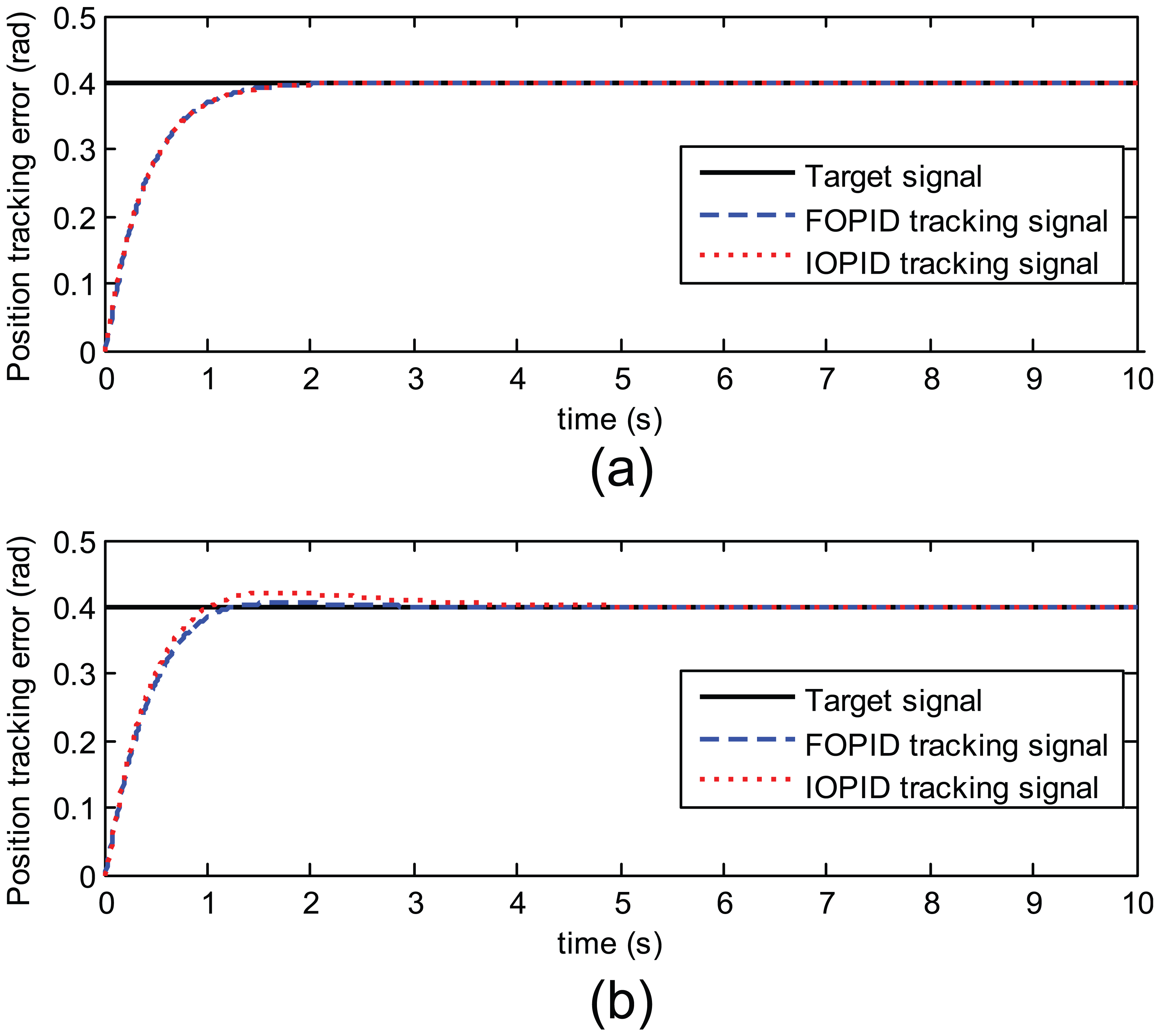
Step responses in IOPID and FOPID control systems: (a) J change before And (b) J change 10%.
To further compare the robustness of the two control systems against external disturbances, square wave disturbances with amplitude of
Positioning errors with square wave disturbances.

Square wave disturbance and the estimated z4.
Figure 6 shows the error curve between the inherent gravitational and external balancing torque of the ESO-FOPID control system. It can be seen from Figure 6 that the torque error is less than 8 Nm in the steady state, verifying that active balancing of the gravitational torque can be realized by adopting the output torque of the balancing chamber.

Torque error in position tracking.
Constant speed tracking
Figure 7 shows the tracking errors in constant speed tracking of the system with sinusoidal disturbance which has frequency of 0.5 Hz and amplitude of 0.5 kN m under ESO-FOPID and FOPID control. The desired speed is 0.08727 rad

Speed errors with sinusoidal disturbances.
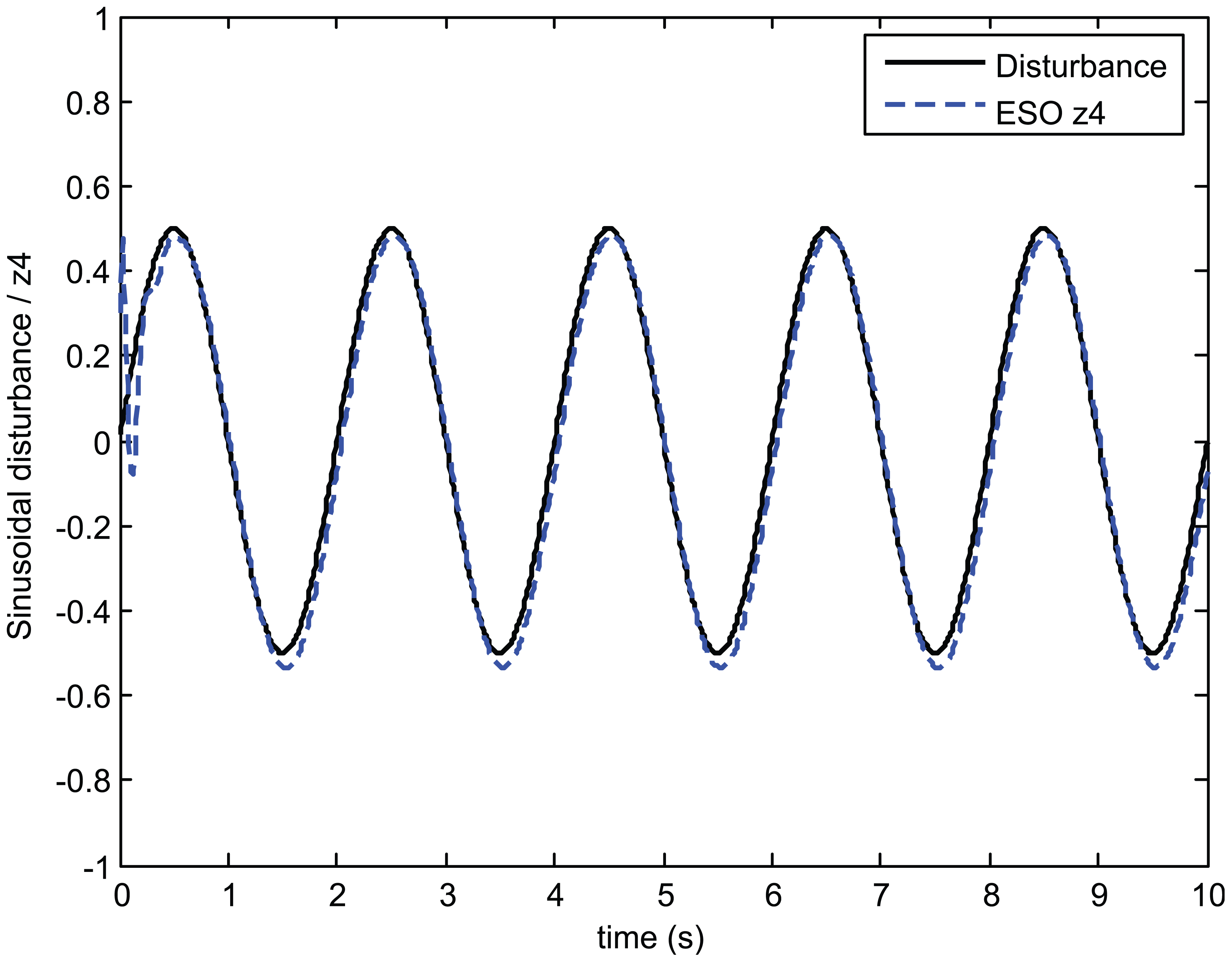
Sinusoidal disturbance and the estimated z4.
Figure 9 shows the deviation between the inherent gravitational and external balancing torques in the ESO-FOPID control system. It can be observed from Figure 9 that although the deviation changes in a mode of sinusoidal variation, the maximum torque error is less than 23 Nm, thus achieving active balancing of the inherent gravitational torque of the gun control system.

Torque errors in speed tracking.
By comparing step responses and constant speed tracking of the IOPID, FOPID, and ESO-FOPID control systems, it demonstrates that the dynamic tracing accuracy of the ESO-FOPID control system is significantly improved when compared with that of the FOPID control system, showing stronger robustness against external loading disturbances than IOPID and FOPID.
Bench test
Step response tests were carried out on the test bench to have a comparison of the dynamic and static performances of the EHS control system under control of the FOPID and ESO-FOPID.
The photograph of the test bench of the EHS system with iso-actuation balancing and positioning is illustrated in Figure 10, mainly involving control computer, servo amplifier box (power panel, RDC conversion board, servo amplified board, etc.), hydraulic system (variable pump, proportional servo valve, metering pump, proportional pressure reducing valve, pressure sensor, etc.), bench, barrel load, dynamic hydraulic cylinder, and rotating transformer.

Iso-actuation EHS system for barrel balancing and positioning.
In order to compare the robustness of the two control strategies against external loading disturbances during bench testing, the control voltage of proportional pressure reducing valve is changed to 3.5 V during t = 5.0–5.5 s, at which time mutations occur in the pressure of the balancing chamber, leading to the mutation of the balancing torque to approximately simulate the addition of a square wave loading disturbance to the system.
Figure 11 shows the error curve between the actual pressure and given pressure inside the balancing chamber which is measured by the pressure sensor. It can be seen that the pressure error in the steady state is 0.01 MPa. During t = 5.0–5.5 s, mutations occur in the control voltage of proportional pressure reducing valve, leading to a change of the pressure inside the balancing chamber to 1.865 MPa.

Pressure errors inside the balancing chamber.
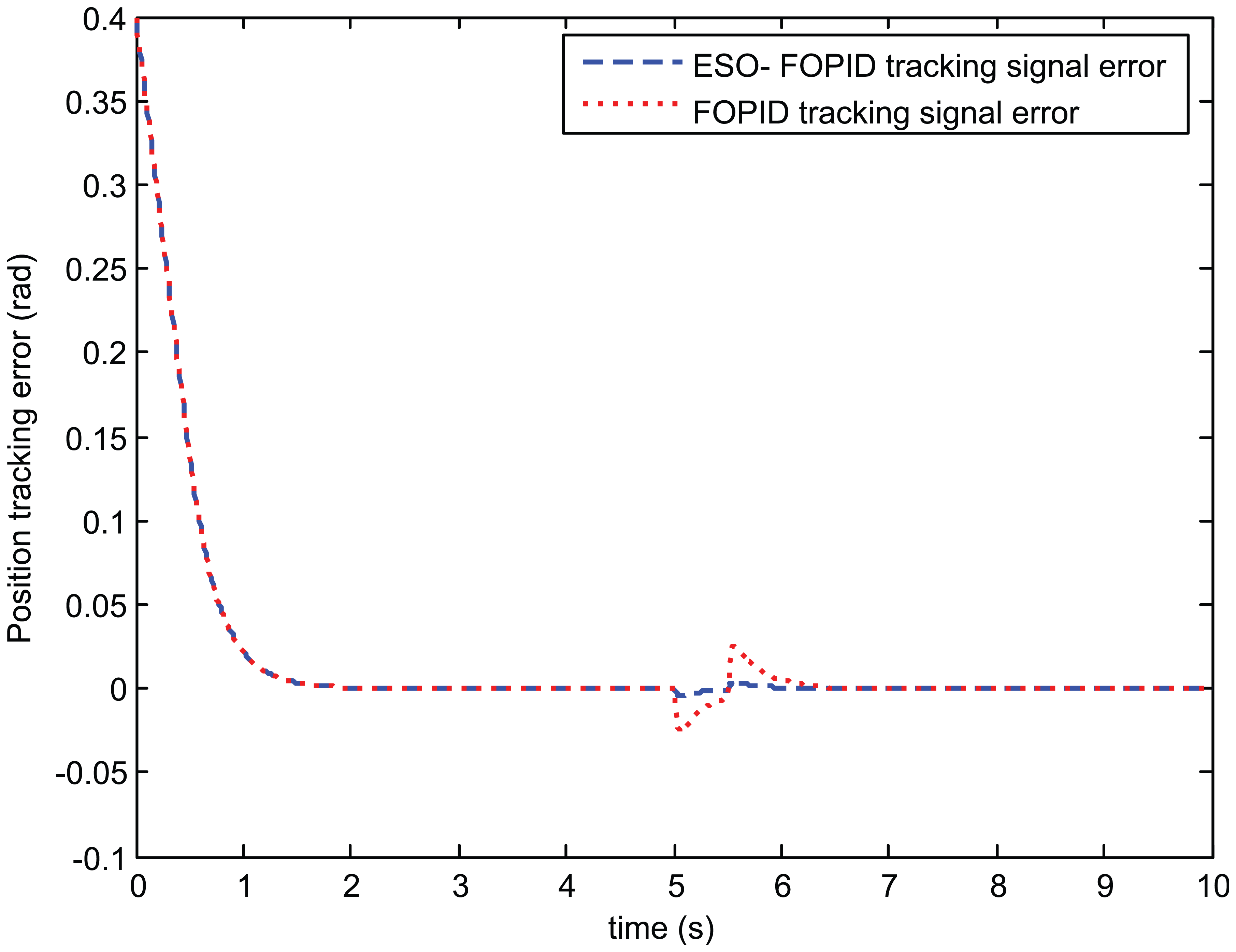
Figure 12 shows the step responses of the system under the ESO-FOPID, FOPID, and IOPID controller. It can be observed that the steady-state error of ESO-FOPID control system is 0.00031 rad. When mutations of the pressure inside the balancing chamber occur, the maximum error for the actual value deviating from the desired value is 0.00640 rad. The steady-state error of FOPID control system is 0.00043 rad. When mutations of the pressure inside the balancing chamber occur, the maximum error for the actual value deviating from the desired value is 0.0198 rad. The steady-state error of IOPID control system is 0.00039 rad. When mutations of the pressure inside the balancing chamber occur, the maximum error for the actual value deviating from the desired value is 0.0315 rad. The Integral Time Absolute Error (ITAE) indexes of ESO-FOPID controller, FOPID controller, and IOPID controller are

Positioning errors with pressure jump.
Conclusion
In this study, a novel EHS system was designed based on a three-chamber hydraulic cylinder, in which the balancing controller was used to realize active balancing of the inherent gravitational torque, and the positioning controller was adopted to realize tracking control of the barrel. Advantages of the EHS system are to simultaneously realize balancing and positioning control of the barrel by applying the same driving source, greatly reducing the weight of the large-caliber weapons for achieving lightweight requirements of the system. With respect to external uncertain disturbances and strong nonlinear characteristics of the EHS system, a novel ESO-FOPID control strategy combining the FOPID control and the ESO was proposed and demonstrated by both numerical simulation and bench testing. The main conclusions were as follows:
The numerical simulations show that compared with the conventional integrate order PID control, the FOPID control has high robustness against system state changes, that is, system parameter variations. When step response is affected by square wave disturbance, then the maximum deviation of the ESO-FOPID control system is only about 16.4% of that of the FOPID control system. When constant speed tracking is affected by sinusoidal disturbance, the tracking accuracy of the ESO-FOPID control system is increased by 7.5 times over FOPID. In terms of perturbation estimation, the ESO-FOPID control system can accurately estimate the disturbance with a smooth curve, and the balancing controller can realize active balancing of the gravitational torque.
The bench testing results show that the control accuracy of the ESO-FOPID is slightly higher than the FOPID and IOPID control system with all being within the steady-state error tolerances. When the mutation of the pressures occurs inside the balancing chamber, then the maximum deviation of the ESO-FOPID is about 32.3% and 20.3% of that of the FOPID and IOPID control system, respectively, suggesting much stronger robustness of the ESO-FOPID control system.
Footnotes
Academic Editor: António Mendes Lopes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation (NSF) of China (51305205).