
Abstract
Bearing temperature rise amplitude is related to the running state of bearing and spindle thermal error, so the measurement of bearing temperature field is helpful to ascertain the bearing running characteristic and analysis of the spindle thermal error. On the basis of thoroughly understood several reasons of bearing heat generation, this article analyzes bearing temperature field simulation based on ANSYS and bearing temperature field measurement based on fiber Bragg grating sensors. The results showed that using fiber Bragg grating is able to complete the bearing temperature field distribution measurement perfectly.
Introduction
The temperature rise amplitude and the temperature distribution status of high-speed rolling bearing directly affect the bearing itself and the spindle bearing system performance. With the increase in bearing speed, the bearing friction heat production is intensified. If the heat is not dissipated in time, bearing temperature will rise too high, which could cause bearing internal parts surface to burn even to bite each other; high bearing temperature rise will also increase the thermal elongation and hot bending amplitude of machine tool spindle, increase the spindle thermal error, and influence the machining accuracy of machine tool. 1
In the machine tool process, due to the existence of the cutting force, the bearings will sustain radial force and the shaft will move along the radial force direction by
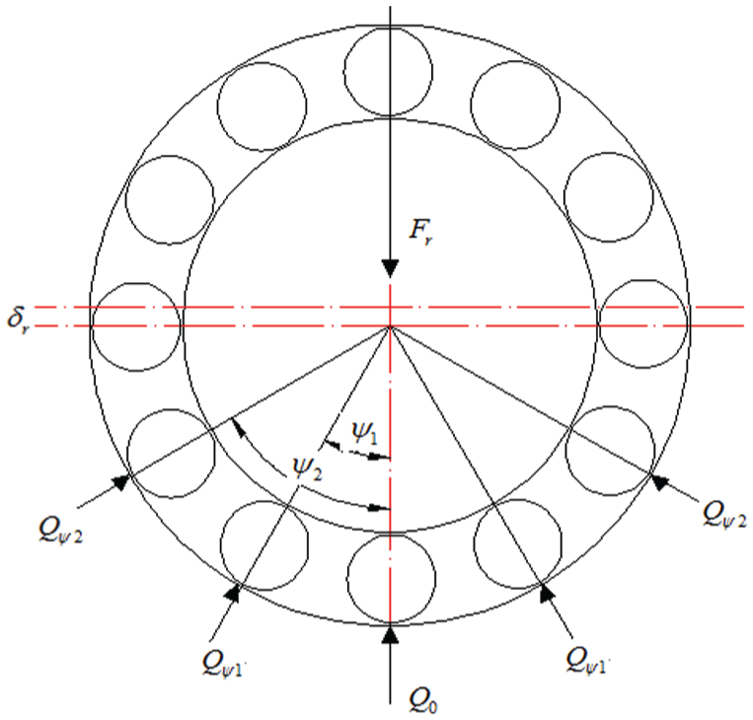
Bearing load distribution under radial force.
In spindle bearing, because of its narrow installation space, severe electromagnetic interference, and lots of lubricating oil and grease, the traditional temperature measurement sensors are difficult to meet the demand of the bearing temperature field measurement, such as thermocouple, 4 which could only measure few points with few wirings; but, fiber Bragg grating (FBG) temperature measurement sensor is able to bear high temperature and low temperature and resist the electromagnetic interference, especially the characteristics of small volume, and “one line multi-point” can be perfectly suitable for bearing temperature field measurement. 5
This article analyzed the influence factors of bearing heat generation and completed the theoretic calculation and simulation analysis based on ANSYS; and through the establishment of bearing temperature measurement system, the authors of this article analyzed the bearing temperature field measurement. By comparing the results, it is found that FBG temperature sensors can describe machine tool spindle bearing temperature field accurately. The nomenclature used in the article is shown in Table 1.
Nomenclature.

Heat generation analysis of bearing
The calculation of bearing friction torque
In the operation of machine tool, the major heat sources include the heat generated from the cutting process and the heat from bearings. It is assumed that the majority of cutting heat is taken away by coolant and therefore the heat generated by bearing is the dominant heat causing thermal deformations. According to the previous work,6–8 the heat generated by a bearing can be computed by the following equation

where n is the rotating speed of the bearing, M is the total frictional torque of the bearing, and Hf is the generated heat. The frictional torque M is the sum of three torques: (1) the torque due to applied load, M1; (2) the torque due to viscous friction,
The torque due to applied load
The torque due to the applied load can be empirically approximated by the following equation

where f1 is a factor that depends upon bearing design and relative load, for single-row angular contact ball bearings
The torque due to viscous friction
The torque due to viscous friction is related to bearing type, rotating speed, and lubricant type. For bearings that operate at moderate speeds and under non-excessive load, the viscous friction torque can be empirically expressed as follows


where f0 is connected with bearing type and lubrication mode, for single-row angular contact and grease lubrication ball bearings
The torque due to spinning motion at contact area
The balls not only rotate about the bearing axis and roll on the contact interface but also spin on the contact surface. For the ball bearing whose contact angle is not zero, the spinning movement exits inevitably. 9 In high-speed ball bearings, the torque due to spinning motion at contact area is larger than that in the low speed. Steel bearing spinning torque on inner and outer friction torques is given by

where
Example and calculation results
Bearing parameters
This article set up the experimental platform using the bearing of 7012AC; the specific parameters are shown in Table 2.
Specific bearing parameters.

Calculation results
According to rolling bearing analysis, 6 the heat generated by ball bearing in per second is

where

where
The simplified spindle system used in this article is shown in Figure 2, according to the shaft force and torque balance, the radial force of NO.2 bearing is 718 N.

The simplified spindle system.
When the bearing is under a radial force of 718 N and a rotation speed of 800 r/min, the total heat generated by the bearing is

Experiment setup
The experimental apparatus is shown in Figure 3. The experimental apparatus is mainly a spindle system. The bearings are under constant preload which is applied by oil; the coupling connects the servo driver and the shaft; the machine tool handle is used for cutting force upload; and the housing is fixed on a vibration isolation platform. Figure 4 is the specific experiment setup.

Experimental apparatus.

The specific experiment setup.
The bearing outer ring temperature field measurement system is based on FBG temperature sensor. The specific layout positions of FBG are shown in Figure 5. There is a ring groove at the contact position of the housing and the bearing outer ring; FBG temperature sensors are arranged in substrates which are printed by three-dimensional (3D) printer, and thermal conductive grease fills the gap between FBG and bearing outer ring.
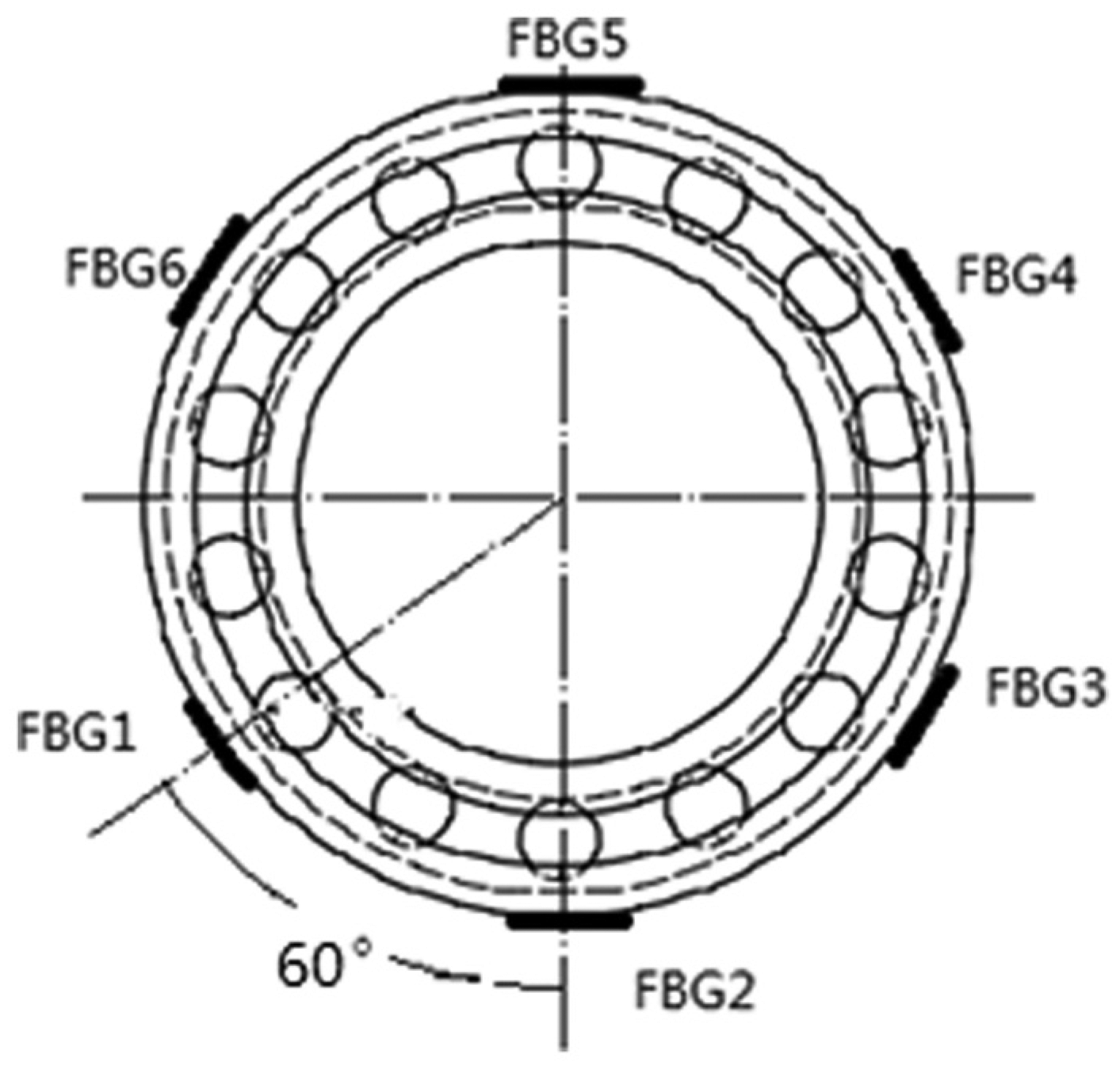
FBG sensors installation locations.
After the installation of FBG sensors, the FBG sensors should be calibrated. When FBG sensors are installed, because of the influence of thermal grease and small substrates, the sensitivity of FBG will be affected by thermal expansion of the thermal grease and its own bending. Therefore, FBGs are necessary to be calibrated. This article placed the whole bearing slider in constant temperature to calibrate the FBG sensors. The specific results are shown in Figure 6. From Figure 6 we can see that every FBG temperature sensor has a very good linear charter to temperature signal.

The calibration results of FBG sensor.
Experiment results
ANSYS simulation
Approximately, the bearing heat is divided by three parts: balls (50%), inner ring (25%), and outer ring (25%). 10 This article assumed that balls contact with inner and outer ring area uniformly distribute, and the overall heat spreads through the contact areas; based on calculation of total bearing heat, this article accomplished the bearing outer ring temperature field simulation through ANSYS. First, establish the bearing outer ring computer aided design (CAD) model in accordance with the actual size of the bearing, calculate the contact area of bearing outer ring and ball, and divide the internal surface of the outer ring by the contact area; second, establish bearing outer ring and bearing housing contact model, mesh the model, and refine the grid of contact area in both the outer ring and the balls specially; and finally, set the parameters, complete bearing heat distribution simulation, and solve the model with initial temperature 25°C; the specific results are shown in Figure 7.

The temperature contour map of the bearing outer ring.
Measurement results
The bearing temperature field measurement experiment was done with bearing speed 800 r/min,

Bearing outer ring temperature measurement curves with bearing speed 800 r/min,
After reaching heat balance, measurement temperatures of FBG1-6 are as follows: 32.84°C, 31.55°C, 31.61°C, 31.40°C, 31.51°C, and 32.56°C.
Result analysis
The measurement results were presented by temperature value at different angles on the same circle and processed curve fitting by Flourier. The comparison of the simulation results and the experiment results on the same circle is shown in Figure 9. The experiment results that are little higher than the simulation results cause the spindle vibration; ANSYS simulation results and the measured results showed the same trend; the lowest temperature point of simulation results is 30.87°C at the angle
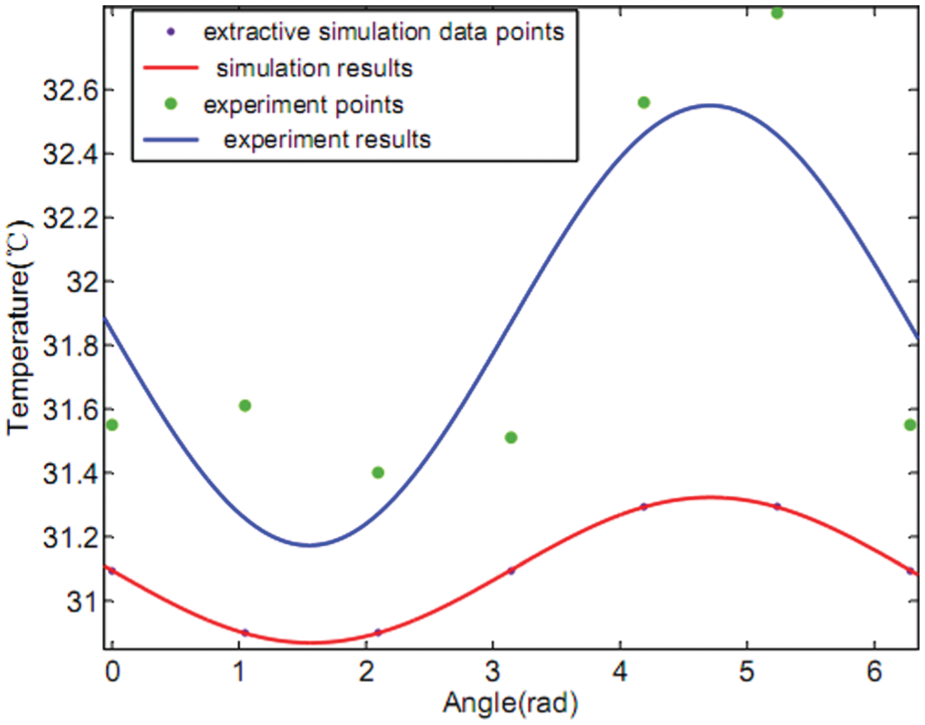
The comparison of the simulation results and the experiment results.
In addition, this article has done other experiments where the spindle was in 1500 r/min,
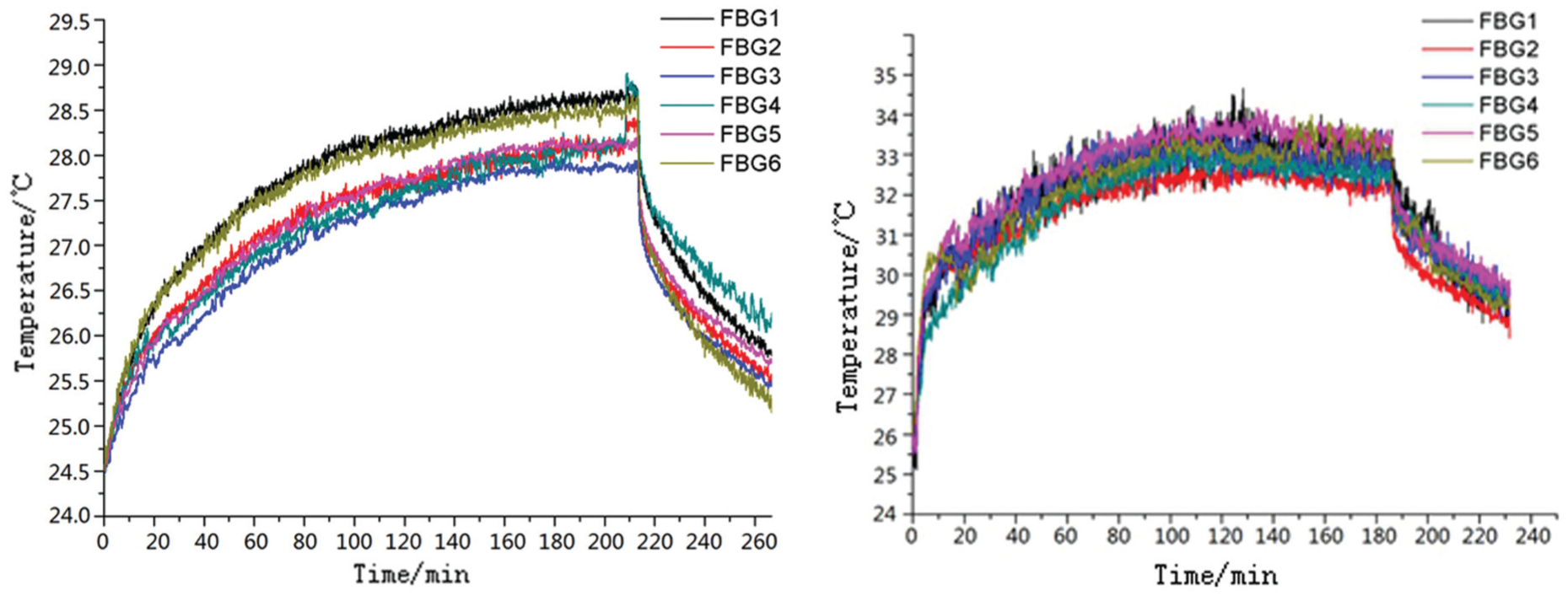
Bearing outer ring temperature measurement curves with bearing speed 1500 r/min,
From Figure 10, it can be found that the temperature field is different when the radial force exits; when the radial force exits, the circumferential temperature difference is obvious for such a small bearing. Comparing Figures 9 and 10, the radial force is the significant factor influencing the temperature and its distribution.
From the compared results, there are small gaps in the highest temperature and the biggest temperature difference. It is because there is a distinction between the simulation and real operation situation, such as small axial force, initial temperature, and spindle eccentricity. But there is apparent discrepancy of the temperature between the circumferential of the bearing. This article can show a promotion in bearing temperature field measurement.
Conclusion
This article analyzed bearing heat generation, completed the simulation of bearing temperature field, and accomplished the measurement of bearing temperature field. It can be seen from the comparison of results, the bearing ring has uneven temperature field with a biggest temperature difference 1.38°C at the spindle speed 800 r/min and
It shows that FBG temperature sensor, “a line of multi-point,” can be perfectly suitable for the characteristics of bearing temperature field measurement and describes the complete bearing temperature field. This article has certain role in complete description of bearing temperature field and monitoring its real running status, exploring the spindle thermal error.
Footnotes
Academic Editor: Sergio Nardini
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This experimental study is supported by the National Natural Science Foundation: Study on heavy-duty NC machine tool monitoring and real-time thermal error compensation method (No. 51475343).