
Abstract
With the fast-developing electromagnetic valve actuator, multi-objective optimal methods for actuator problems have been widely concerned in recent years. This article presents a modified multi-objective particle swarm optimization algorithm based on sorting method and employs it to the product design of the actuator. The simulation results show that modified optimization algorithm could obtain a better Pareto front in contrast to classical non-dominated sorting genetic algorithm-II method, meanwhile preserving the high capacity of fast solving of non-dominated solutions.
Introduction
Electromagnetic valve actuators have been fast developments in aerospace and industrial applications and the need for high performance is getting higher, have inspired mechanical and electrical designers to hunt for optimal design with available algorithms.1,2 Ideally, a light-weight and high thrust force is an optimum one. However, these characteristics are in all probability conflict with each other. For example, it is possible to design an actuator with high performance on thrust and latching force, but big volume and high weight. From another point of view, a small and light actuator will have low thrust and latching force. Therefore, to achieve the goal for applying, designers have to deal with many problems to search for appropriate design parameters between conflicting technical goals. The complex dimension parameter optimization has large influence on the design of product components with high quality, reliability, and stability, which is inextricability without the aid of reasonable and high-efficiency intelligence-optimized algorithm. Instead of one solution, there will be a set of non-dominant solutions; designers will choose best balance in each case.3–7
For this reason, a series of methods known as multi-objective particle swarm optimization (MOPSO)8–13 and non-dominated sorting genetic algorithm-II (NSGA-II) 1 have been applied in industrial and military optimization design. The MOPSO algorithm originated from the single-objective particle swarm optimization (PSO), which is an evolutionary algorithm approach proposed by Dr Eberhart and Dr Kennedy in 1995. 14 PSO, which is a population-based algorithm used for simulating the movement of a fish school or bird’s flock and developed to solve the single-objective, has been successfully improved and employed to solve multi-objective optimization design problems on account of its fast convergence speed and briefness.15–18 Although these advantages drive designers to expand MOPSO algorithms continuously, it is inefficient in some complex multi-objective operation. NSGA-II is derived from Darwin’s biological evolution theory and suited to solve multi-objective problems. However, this algorithm has the drawbacks of low convergence rate and precocity frequently.
This article presents a process of MOPSO based on niche sorting method from NSGA-II. Niche describes the process of how an organism or population reacts to the distributing characteristics of resources and competitors. As for niche, the large population of variables composed of the multi-dimensions of an environmental niche mutate from one species to another and the relative importance of specific environmental variables for a species may mutate depending on the conditions and constraints. Non-dominated sorting multi-objective particle swarm optimization (NSMOPSO) has the advantages of rapid convergence, relatively high probability of searching global optimization solution, and simplicity. Furthermore, the presented NSMOPSO algorithm is compared with the NSGA-II algorithm, and the difference is shown.
Fundamentals of NSMOPSO
Overview of the standard PSO algorithm
PSO is an effective global optimization algorithm, and the mathematical description is as follows. If a swarm has a population of N in searching space, particle i consists of D-dimension vector at any moment. In iteration t, the location of the particle is initialized by x i = [x i1, x i2, ..., x id]T, (i = 1, 2, ..., N), (d = 1, 2, ..., D) and the fitness value of particle i is able to be obtained by x i(t), which can be substituted into the objective function or fitness function about x i. The local best position p i = [p i1, p i2, ..., p in]T represents previous best position for particle i at iteration t that can be evaluated by comparing particle ith current location to previous position. Meanwhile, p g = [p g1, p g2, ..., p gn]T represents the global best position,. According to equations (1) and (2), update particles’ velocity and position to complete an iterative optimization after searching the two extreme values


where w is inertia weight, which determines the inheritance of the current velocity of the particle. The large inertia weight is helpful to expand global optimization, but the small inertia weight is beneficial to local optimization. c
1 and c
2 are acceleration coefficients or accelerated constants which control the maximum step size, and r
1 and r
2 are independent, uniformly distributed random number within the range from 0 to 1. The subscript k represents a pseudo-time increment, and
Multi-objective optimal problem
Usually, there are several nonlinear objectives for a multi-objective optimization problem at the same time. These objective functions need to be optimized at the same time; meanwhile, they are often conflicting. The optimization problem can be described as

where
There are two main ways to process multi-objective problem except traditional optimization methods, such as the orthogonal experiment method:
A way based on weighted combination single-objective problem. However, the weighted values cannot be predicted or applied to weighted method and can greatly influence the results in a real -world situation. 19
Obtaining a set of non-dominant solutions by Pareto dominance relationship.
This article employs the second way and makes further decisions based on the actual situation. So, in multi-objective problem, the optimum is defined through terms of Pareto optimality. 20
Definition 1
Pareto dominance, given
Definition 2
Pareto optimality, the feasible solution
Definition 3
Pareto optimal set,
Definition 4
Pareto front, given a Pareto optimal set, P. Each solution in P has a corresponding objective function vector which forms surface, called Pareto front, denoted by PF.
Local and global best position of NSMOPSO
In the NSMOPSO algorithm, the local best position could be selected based on Pareto dominance relationship. When the current position of the particles dominates their local best position P, P will be updated to the current position of the particles. However, when local best position P dominates the current position, P remains in the current position. If there is no dominance relationship, the program will randomly choose 1. The global best position Pg can be chosen based on sorting which is the best solution of fitness values in external archive.
External archive of the particles
The population of external archive N is established for storing the Pareto optimal solution proposed to improve the computational accuracy, and the duplicate solutions will be cleared. When particles in the external archive are beyond the allowed value range N, low fitness particles will be superseded to maintain the evenness of solutions in external archive.
Strategy of the niche
According to the information sharing strategy of the niche, the individual Xi in external archive can be defined

where NS is the number of individuals in niche, and Si is the extent of Xi sharing and is acquired according to

where fsh (dij ) is known as the sharing function between individual Xi and Xj , which shows the relationship between the two individuals in niche and is given by

where α represents the parameter of shape control, which is 1 or 2. σshare is a pre-set range of sharing. dij is the distance between X i and X j and is given by

The strategy of the niche could drop fitness of parallel individuals to reduce the probability of searching the double and avoid precocity successfully by the method that the quantity of individual increases in niche.
Gaussian mutation
Although the classical MOPSO algorithm has the characteristic of fast convergent rate, this will result in the algorithm much more easily convergent to Pareto locally than globally optimal front. Therefore, this article introduced Gaussian mutation, which will be at a certain probability to initialize the particle second to P. Meanwhile, this will randomly initialize the particles beyond range to increase the utilization rate of particles.
The procedure for implementing NSMOPSO is illustrated in Figure 1 and given by the following basic steps.
Step 1. Initialize the swarm of particles Np , random positions X 0, velocities V 0, and individual particle optimal position P = X 0. Configure the generation counter t = 0 and external archive NS = 0.
Step 2. Calculate each particle’s objective function and store the non-dominated solution to external archive.
Step 3. According to equation (3), calculate each particle’s fitness and sorting by descending. Set the largest individual as the global best position Pg .
Step 4. According to equations (1) and (2), update individual position X and velocities V. Inertia weight adopts the strategy of linear differential diminishing and is given by


Compared with the conventional PSO which adopts the linear gradient, the probability of finding the globally optimal value is enhanced in its wake and faster convergence speed in the late. The operational capability of new algorithm is more stark.
Step 5. Update external archive Ns by the non-dominated solution in the current particle swarm.
Step 6. If the external archive is over the capacity, low fitness particles will be eliminated.
Step 7. Return to step 3 until the termination condition is met, and the optimality solution sets are acquired by external archive.

Flow chart of NSMOPSO.
Simulation experiment and analysis
The optimal design of linear actuator is in order to improve the space utilization and obtain the required thrust force in pneumatic and hydraulic united controlled system. Figure 2 and Table 1 show the linear actuator structure with six dimensions.
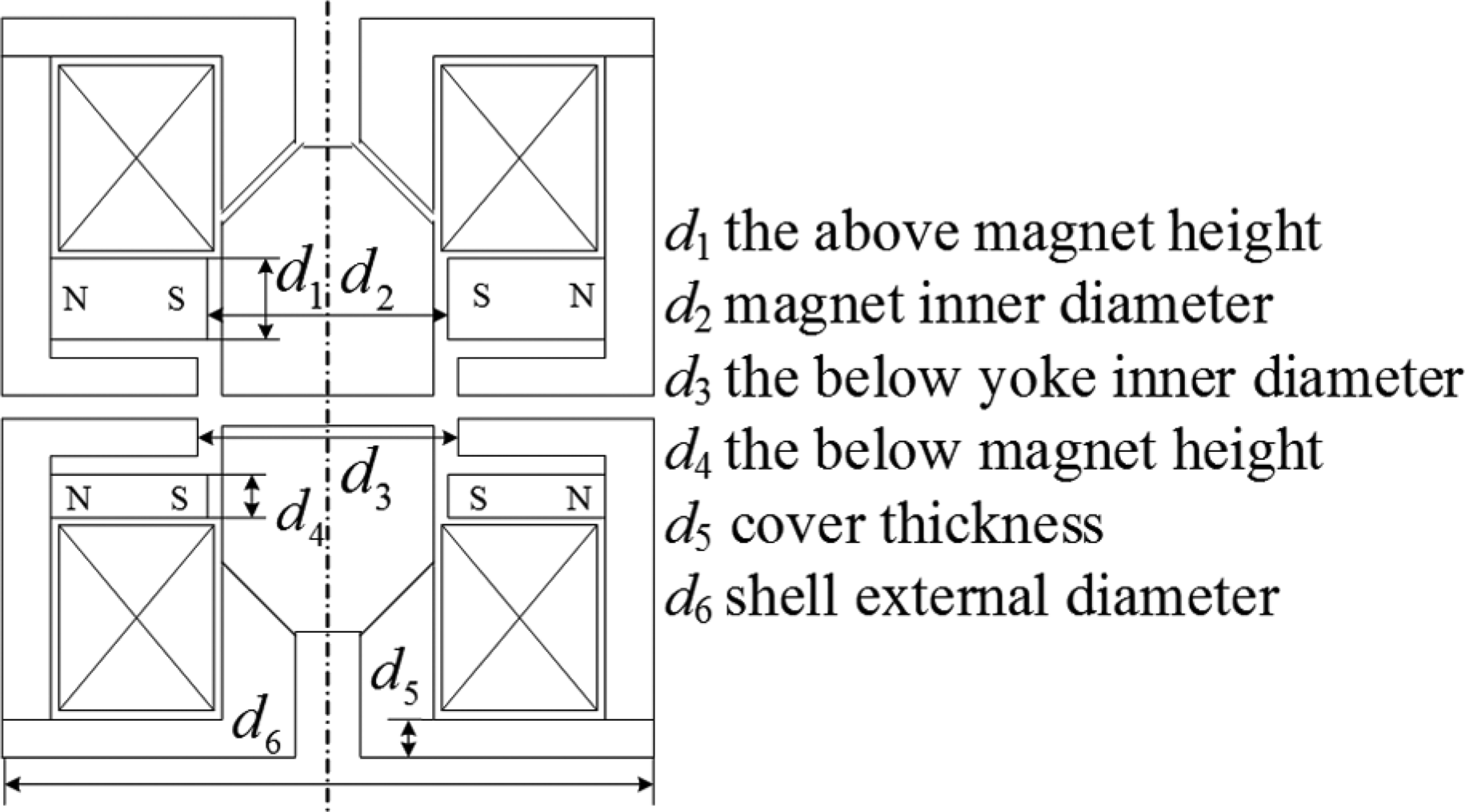
Linear actuator structure and variables.
Range of six dimensions of the linear actuator.

The proposed simple structure graphing of an axisymmetric and cylindrical actuator is shown in Figure 2, which consists of two sets of radially magnetized PMs (permanent magnet), two circular coils, two shells, and two armatures which connect to each other. Energize the two coils with positive or negative to drive the armatures. The six key parameters can produce an effect on force characteristics and volume size of the actuator.
The parameter settings of NSMOPSO are as follows: inertia weight wstart
= 0.9, wend
= 0.4, acceleration coefficients c
1 = c
2 = 2, niche radius σshare
= 1, shape control
Constraint condition for the linear actuator optimization.

Figure 3 shows the Pareto front of the problem for the parameter constraint case for two conflicting objectives, latching force and volume ratio, obtained by NSMOPSO and NSGA-II.

Pareto front of NSMOPSO and NSGA-II: (a) latching force–volume ratio and (b) thrust force–volume ratio.
It should be noted that NSMOPSO and NSGA-II have discontinuous feasible areas in particular space; as a result, this causes discontinuous Pareto front. Figure 3(a) and (b) shows that NSMOPSO is closer to Pareto front obviously in latching force–volume ratio and thrust force–volume ratio. There is not an apparent turning point for NSGA-II Pareto front in Figure 3(b) because of the discontinuous feasible areas.
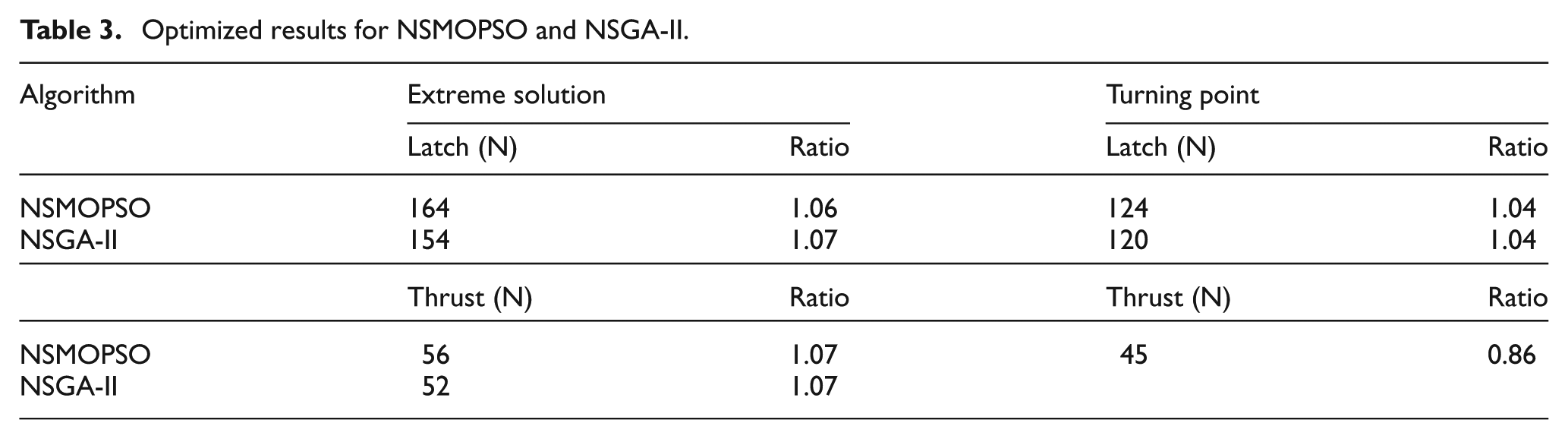
Table 3 shows the optimized results for NSMOPSO and NSGA-II about extreme solution and turning point. The simulation results show that the Pareto front of NSMOPSO is far more widespread and represents a greater opportunity in searching best solution.
Optimized results for NSMOPSO and NSGA-II.
Conclusion
Through the actuator simulation, the result reveals that NSMOPSO based on niche strategy in this article works well to obtain better Pareto front and provides an algorithm to solve the actuator and various apparatus design problems. The figures of Pareto front also reveal that algorithm has the ability to generate relatively outstanding performance distributed Pareto fronts compared with the selected.
Footnotes
Academic Editor: ZW Zhong
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the NSFC (National Natural Science Foundation of China), Project 51177021 and 51207028.