
Abstract
The reliability of vibration signals acquired from a planetary gear system (the indispensable part of wind turbine gearbox) is directly related to the accuracy of fault diagnosis. The complex operation environment leads to lots of interference signals which are included in the vibration signals. Furthermore, both multiple gears meshing with each other and the differences in transmission rout produce strong nonlinearity in the vibration signals, which makes it difficult to eliminate the noise. This article presents a combined adaptive filter method by taking a delayed signal as reference signal, the Self-Adaptive Noise Cancellation method is adopted to eliminate the white noise. In the meanwhile, by applying Gaussian function to transform the input signal into high-dimension feature-space signal, the kernel least mean square algorithm is used to cancel the nonlinear interference. Effectiveness of the method has been verified by simulation signals and test rig signals. By dealing with simulation signal, the signal-to-noise ratio can be improved around 30 dB (white noise) and the amplitude of nonlinear interference signal can be depressed up to 50%. Experimental results show remarkable improvements and enhance gear fault features.
Keywords
Introduction
With the development of wind power technology and its increasing installed capacity, higher requirements to the safety and reliability of wind turbines are put forward. 1 The hush working environment, the intense wind fluctuation and the rapid load changing lead the drive train prone to failure. Gearbox is one of the key components in doubly-fed induction generator (DFIG) wind turbine drive train; its safety and reliability have drawn wide attention.2,3
The gearbox, composed by planetary gear system and fixed-axis system, is a complex system, and its early faults are mainly concentrated on the gear or bearing. Large transmission ratio leads some components in planetary gear system generally operate under low rotational speeds. It is true that low-frequency characteristics are easily masked by heavy noise. 4 Thus, it is more difficult to discover the fault characteristics of low-speed components, that is, to say, the noise signals need to be filtered out. But for the vibration produced by the planetary gearbox component coupled with each other and the variation of transmission rout, the vibration signals have strong nonlinearity. 5 Therefore, it is difficult to filter out the noise with linear filter. Furthermore, the change in wind speed and generation power leads the vibration signal obvious and nonstationary; this increases the difficulty to filter out the noise. 6
Lots of noise cancellation technologies, such as wavelet de-noise method,7,8 morphological filtering method 9 and adaptive filter method,10,11 have been developed to eliminate the noise. The wavelet de-noise method uses the wavelet base function, similar to the characteristic signals, to decompose the signal into detail signals with different frequency bands, then the noise can be cancelled on the detail signals. It is suitable for processing the nonstationary linear vibration signals. The morphological filtering method is suitable to extract the characteristic signals by dilation, erosion, opening and closing operations to characteristic morphology. The application effect of this method has some limitations due to its reliability which depends on the accuracy of the characteristic morphology modal, and the complexity and variety of gearbox fault characteristic signals which make the modal too difficult to be expressed. Adaptive filter offers a highly attractive solution to the problem whenever there is a requirement to process signals that result from operation in an environment of unknown statistics or one that is inherently nonstationary, but it has limitations to the nonlinear signals. 12
In order to enhance the planetary gearbox fault features, this article proposed a new method, combined of the normalized least mean square (NLMS) adaptive filter algorithm 13 and kernel least mean square (KLMS) adaptive algorithm, 14 to eliminate the noise in the vibration signals, which is produced by the fault in the planetary gear system. The NLMS algorithm is adopted to eliminate the white noise in the vibration signals and the KLMS algorithm is used to cancel the nonlinear interference. The methods that are proven to be effective by the real dataset are acquired from the test rig.
Adaptive filtering and noise cancellation
The theory of adaptive filter
The adaptive filter is a supervised learning method, which can offer an attractive solution to the problem where operation in an environment of unknown statistics or one that is inherently nonstationary.
12
It can be used to cancel unknown interference contained in primary signal by controlling the values of a set of adjustable filter coefficients through the estimated error, which is computed from an input vector and a desired response. The basic structure of an adaptive filter is shown in Figure 1. An input signal vector

Basic structure of a linear adaptive filter.
Based on the theory of adaptive filter, there are lots of extensions to cancel the noise. Among them, the least mean square (LMS) algorithm 12 and the KLMS algorithm 14 are widely used. To a signal which contains a linear superposition noise, the LMS is useful to eliminate the interference. But to the signal which contains a nonlinear superposition noise, the LMS method has some limitation, so the KLMS should be considered.
The LMS algorithm
The LMS algorithm is a linear model, and for its stability and simplicity, it has been widely used. It needs two input signals,




where
As the LMS algorithm suffers from a gradient noise amplification problem, to overcome it, the normalized LMS (NLMS) is proposed.
14
The NLMS method has an improvement in

where
As the characteristic signals are periodical and the white noise has no periodicity, NLMS algorithm is used to separate the white noise and periodical signals. But the difficult point is to find reference signals

Signal processing procedure of SANC.
KLMS adaptive filter
By taking advantage of the reproducing property of reproducing kernel Hilbert space (RKHS), the KLMS adaptive filter can implement a nonlinear transformation to transform the input signal



The output of the system to a new input


After N step training, the final input–output is


where

The proposed scheme and numerical validation
This section describes how SANC and KLMS algorithms were applied to a signal simulated from gearbox frequencies.
The gearbox applied to the DFIG wind turbine has two main kind structures, one consists of a planetary gear and two fixed-axis gears and the other consists of two planetary gears and one fixed-axis gear. Faults on the fixed-axis gears are easy to diagnose; this article mainly focuses on the vibration signals of planetary gear fault. The structure of a planetary gearbox is shown in Figure 3; it is composed of planetary gear, ring gear, sun gear and carrier. When rotating, the ring gear is fixed, and the carrier rotates with its planetary gear. In Figure 3, the vibration accelerometer transducer, mounted on the surface of planetary gear, experiences a periodic variation in vibration amplitudes as the meshing position periodic changes, and then, the measured vibration signals have strong nonlinearity. 5 Besides, the different transmission paths would lead the vibration signals of different measurement points to nonlinear relationship.

Structure of planetary gearbox.
A planetary gear fault would appear in modulation sidebands, which can be simply expressed as follows 16

where
Suppose
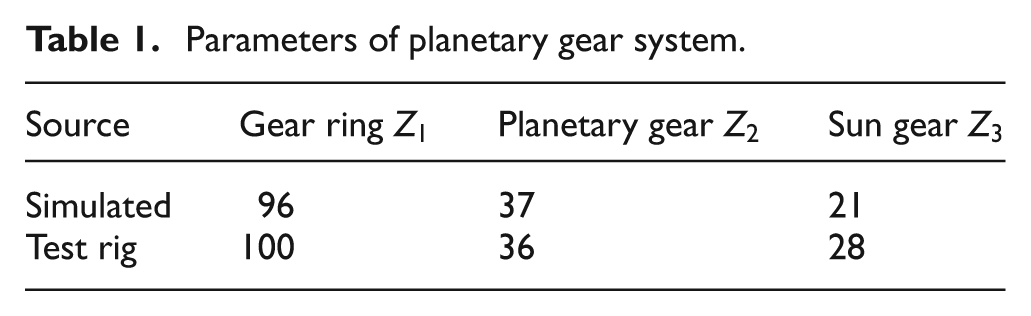
Parameters of planetary gear system.

Time domain of simulated signal for (a)

Frequency domain of simulated signal for (a)

Zoom frequency of signal
A SANC method was applied to remove the white noise from the signal. According to Haykin,
12
the time delay

Comparison diagram of

Comparison diagram of
A KLMS algorithm was applied to remove the nonlinear interference from the signal. A couple of vibration signals from the planetary gear and sun gear results in low reliability of planetary gear fault diagnosis. As mentioned above,

Frequency domain of simulated signal
Gear fault feature enhancement
This section reports the application of the SANC and NLMS algorithms to detect the planetary gear surface wear fault. The experimental data are collected using the test rig shown in Figure 9. It comprises three-phase induction motor, parallel transmission gearbox, planetary gearbox and damper.
Tests were carried out using planetary gearbox with one planetary gear wear under varying loads (20%, 40%, 60%, 80% and 100%). The maximum load of damper is 88 Nm, and the parameters of planetary gearbox are set as Table 1. The vibration signals were collected using accelerometers mounted vertically on the planetary gearbox housing (MP1) and the bearing (MP2) between planetary and damper, as shown in Figure 10. The cut-off frequency for anti-aliasing is set to 700 Hz, and the sampling frequency is 2560 Hz.

Test rig.
The proposed scheme architecture for dealing with the experimental signals is shown in Figure 11. The datasets measured under operation condition of motor rotational speed is 35 Hz, planetary gear surface wear. The vibration signals are collected from MP1 and MP2 (shown in Figure 12).

Proposed scheme architecture.

Measured vibration signals on time domain from (a) MP1 and (b) MP2.
Figures 13 and 14 show the vibration signals in frequency domain after applying the SANC algorithm. Figures 13(b) and 14(b) zoom in on the interested part. In Figures 13(a) and 14(a), parts 1–4, respectively, consist of one to four times meshing frequency and its corresponding sidebands. From these figures, it is clear that by applying the SANC algorithm, the white noises in signals can be effectively eliminated. Taking the SANC de-noised vibration signal of MP1 as the reference signal and the SANC de-noised signal of MP2 as the input signal, the nonlinear mapping between two signals has been established and the nonlinear de-noising has been carried out through the KLMS algorithm. The results are shown in Figures 15 and 16.

Frequency domain for MP1 after applying the SANC algorithm: (a) full view and (b) zoom onto interested part.

Frequency domain for MP2 after applying the SANC algorithm: (a) full view and (b) zoom onto interested part.

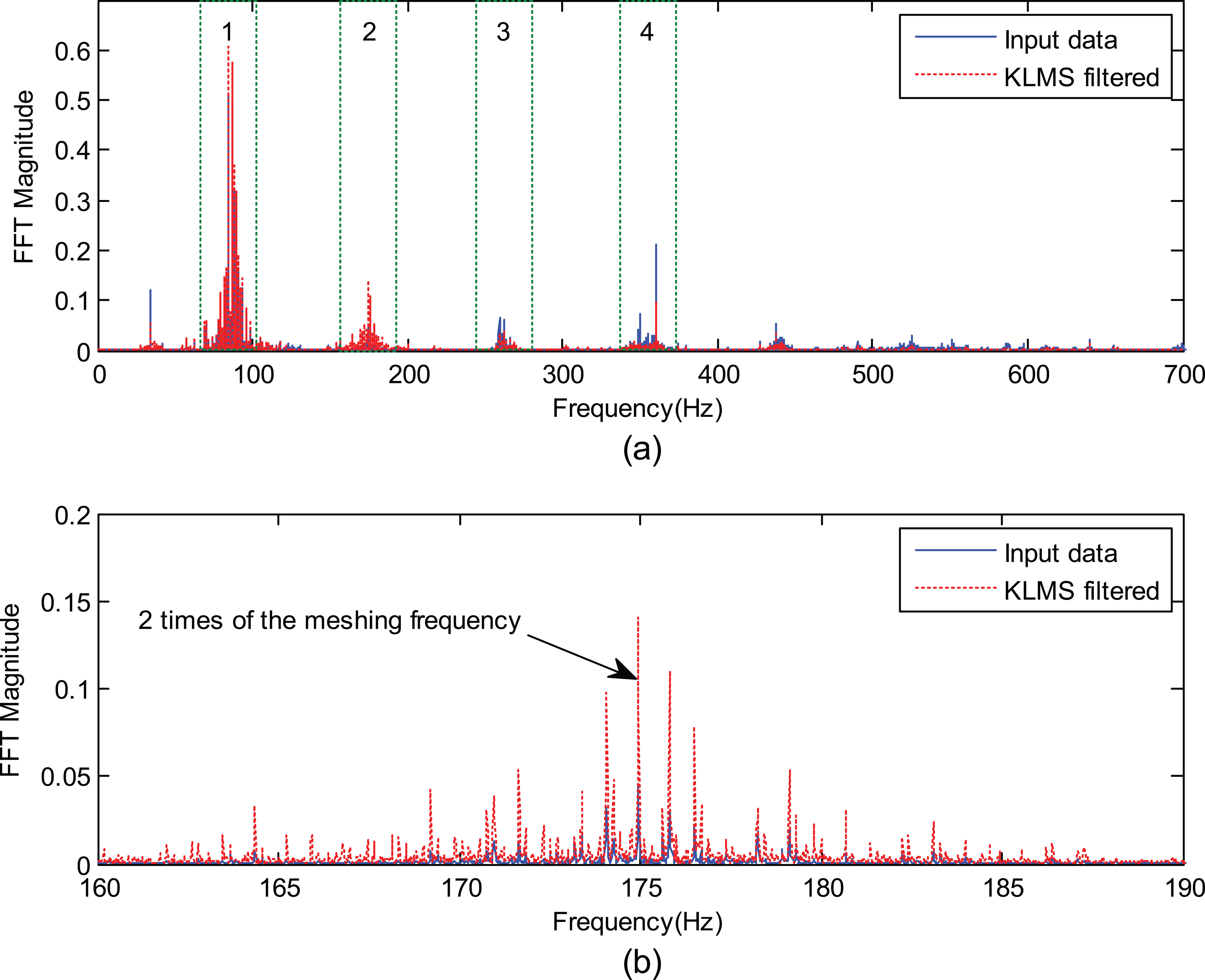
Frequency domain comparison of MP1 input data and the output data after applying the KLMS algorithm: (a) full view and (b) zoom onto interested part.
Frequency domain comparison of MP2 input data and the output data after applying the KLMS algorithm: (a) full view and (b) zoom onto interested part.
Figures 15 and 16 show the frequency comparison of signals between the reference signal (input signal) and the KLMS de-noised. It can be seen that after applying the KLMS algorithm, the nonlinear components of the two signals (reference signal and input signal) can be extracted and the interference components can be reduced.
Using the same input data to do linear adaptive filter through NLMS algorithm, the result is shown in Figure 17. Comparing the fault features in two times meshing frequency scope in Figures 15(a) and 17, the KLMS algorithm can retain more useful components (like the two times meshing frequency and its sidebands). This can also prove that the vibration signals of different points on planetary gearbox have certain nonlinear relationship.
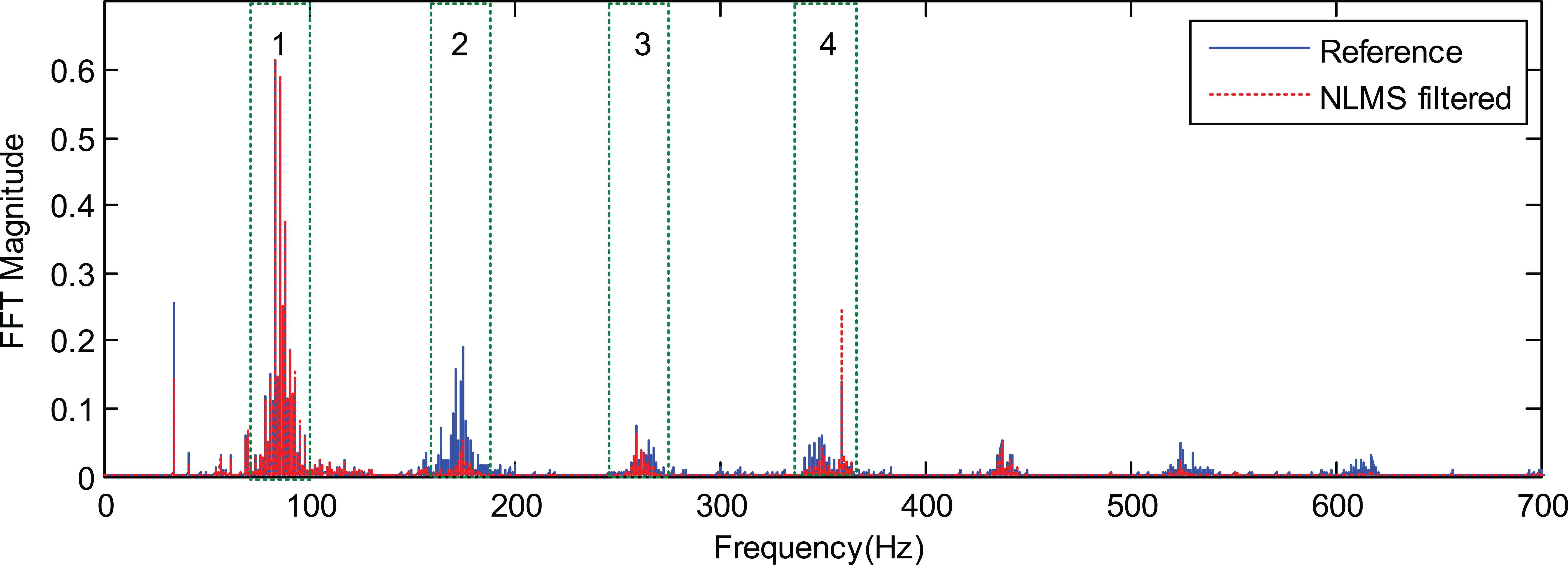
Frequency domain de-noised signal using NLMS algorithm.
The KLMS nonlinear algorithm is more attractive than NLMS linear algorithm to cancel the noise in the signals measured on planetary. Using the combined adaptive filter to cancel the noise in the measured signals under varying loads (20%, 40%, 60%, 80% and 100%), the results are shown in Figure 18. It is clear that with the increasing load, the amplitude of frequency multiplication components increased, and then the fault feature would enhance. If we use threshold value to judge the fault, the threshold value should be changed with the load.

Frequency domain for gear vibration of MP2 after applying the KLMS algorithm (load: 20%, 40%, 60%, 80%, 100%): (a) full view and (b) zoom onto interested part.
Conclusion
The vibration signals produced by the planetary gearbox faults have strong nonlinearity, and in order to eliminate the noise, the combined algorithm of SANC algorithm and KLMS algorithm has been adopted, modified and applied to the signals at simulated gearbox frequencies and the ones collected experimentally from a gearbox. The novelty lies in white noise which can be eliminated using the SANC algorithm with a delayed signal as the desired signal, and the amplitude of nonlinear interference signal can be depressed using the KLMS which builds the nonlinear relationship between two input signals, that is, the characteristic signals should be enhanced. The algorithms are verified by the signals from the simulated planetary gear system and test rig. The results appeared to be good, which could prove that the noise eliminating methods are effective to reduce the noise in the vibration signals of planetary gearbox.
Footnotes
Academic Editor: Neal Y Lii
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant no. 61573046).