
Abstract
This article is concerned with the observer-based output feedback stabilization problem for a class of nonlinear systems that satisfies the one-sided Lipschitz and the quadratically inner-bounded conditions. The system model under consideration encompasses the classical Lipschitz nonlinear system as a special case. For such a system, we design the output feedback controller via constructing a full-order Luenberger-type state observer. Sufficient conditions that guarantee the existence of observer-based output feedback are established in the form of linear matrix inequalities, which are readily solved by the available numerical software. Moreover, the proposed observer-based output feedback designs are applied to a flexible link manipulator system. Finally, simulation study on the manipulator system is given to demonstrate the effectiveness of the developed control design.
Keywords
Introduction
In the design of feedback control systems, the knowledge of system state plays a key role. However, in engineering practice it may be quite difficult, sometimes even impossible, to directly measure all the system state variables through sensors. 1 In those situations, a state observer is usually needed, and then the so-called observer-based control can be carried out using the estimated state.2–4 For linear systems, the observer-based control is readily achieved due to the separation principle. However, for nonlinear systems, the observer-based control problem becomes quite difficult. In fact, for a general nonlinear system, the state estimation by itself is still an open problem. Therefore, the observer design associated with the observer-based control problems of nonlinear systems has received considerable attention in the past two decades; see, for example, Maurice et al., 5 Rajamani, 6 Zhu and Han, 7 Talole et al., 8 Shaker and Tahavori, 9 Shaker and How, 10 Raghavan and Hedrick 11 and Song and Hedrick, 12 and the references therein.
It is known that for a general nonlinear system, the so-called separation principle may not be valid. As a consequence, the observer-based stabilization for general nonlinear plants becomes quite challenging. Therefore, in recent years, many research efforts are mainly focused on some special kinds of nonlinearities.6–12 For instance, the classical Lipschitz nonlinear system was popularly studied. Indeed, in practice many physical systems globally or locally are Lipschitz continuous. Till now, various effective methods have been provided to study the design of Lipschitz state observers and the associated observer-based output feedback control issue, for example, the Riccati equation–based approach developed in Rajamani, 6 Zhu and Han, 7 Talole et al., 8 Shaker and Tahavori, 9 Shaker and How, 10 and Raghavan and Hedrick 11 and the linear matrix inequality (LMI)-based output feedback design proposed in Kheloufi et al., 2 Lien, 4 and Song and Hedrick. 12
More recently, the one-sided Lipschitz condition has been introduced in the design of nonlinear state observer.13–16 It is shown that the one-sided Lipschitz encompasses a large class of nonlinearities and can reduce conservatism in the existing designs. Abbaszadeh and Marquez 17 further studied the state estimation problem of one-sided Lipschitz systems by introducing an additional restrict called quadratically inner-bounded condition. For such systems, less conservative designs on both full-order and reduced-order observers have been considered by Zhang et al.18,19 where the Riccati equation and the LMI approaches were, respectively, introduced. In the discrete-time case, the state estimation issue was investigated in Zhang et al. 20 Moreover, the observer design for such systems with unknown inputs was addressed in Zhang et al. 21 However, it should be noted that most of the above-mentioned references are focused on the observer deign issue. A more challenging problem is the observer-based stabilization or output feedback control for one-sided Lipschitz systems. This also motivates this study.
In this article, based on Lyapunov stability theory,
22
we consider the observer-based stabilization for a general class of nonlinear systems satisfying the one-sided Lipschitz and the quadratically inner-bounded conditions. In the existing literature, to the best of our knowledge, only Fu et al.
23
address the similar problem. However, Fu et al.
23
actually used the one-sided Lipschitz property defined in Hu,
13
which is scaled by a positive definite matrix
In this study, we also employ Young’s relation to deduce the observer-based output feedback controller synthesis conditions for nonlinear systems that satisfy the one-sided Lipschitz condition and quadratically inner-bounded condition. The systems under consideration include the classical Lipschitz nonlinear systems as special cases. Motivated by the methods proposed in Kheloufi et al. 2 and Zhang et al., 18 we formulate the observer-based controller design issue for such systems into solving a set of LMIs, which are readily tractable via numerical software. Moreover, as the application of observer-based control design, we use the developed stabilization approach to a flexible link manipulator system. The simulation results on the manipulator system are also provided to demonstrate the effectiveness of the proposed observer-based stabilization approach.
We shall use the following notation in this article:
Problem statement and preliminaries
Consider a class of continuous-time nonlinear systems described by

where
In what follows, we shall recall the Lipschitz property and the one-sided Lipschitz property of the vector-valued function
Definition 1
The vector-valued function

where
Definition 2
The vector-valued function

where
Definition 3
The vector-valued function

It is worthwhile to point out that the one-sided Lipschitz constant

The Lipschitz, one-sided Lipschitz, and quadratically inner-bounded function sets. 26
In this article, we focus our attention on the observer-based output feedback control for system (1) as well as its application to a flexible link manipulator system. In the next section, we will consider the observer-based stabilization design. We end this section by introducing the following two useful Lemmas.
Lemma 1
For two matrices

Lemma 2 (the Schur complement Lemma; see, for example, Boyd et al. 25 )
For a real symmetric matrix
Observer-based stabilization design
In this section, we address the observer-based stabilization problem for system (1) under conditions (3) and (4). As usual, we first employ the known Luenberger-like observer to estimate the state and then use the estimated state to design a linear output feedback. More precisely, we propose an observer-based controller as follows

where
Denote the estimation error by

where

In view of equations (7) and (8), the closed-loop system can be rewritten as

where
For system (9), let us consider the following Lyapunov function candidate

Consequently, calculating the derivative of V along the state trajectories of equation (9) gives

where


Notice that
Theorem 1
Consider system (1) satisfying the conditions (3) and (4). Let the observer-based output feedback controller be constructed in the form of equation (6). Then the closed-loop system (9) is asymptotically stable if there exist matrices

where







Furthermore, the resulting observer gain matrix K and the output feedback gain matrix F are, respectively, given by
Proof
Consider the closed-loop system (9) with equations (3) and (4). Based on Lyapunov stability theory, we will prove that equation (9) is asymptotically stable if the conditions of Theorem 1 are satisfied. To begin with, let the Lyapunov function candidate
Notice that

and

Similarly, from condition (4), we get
and
where
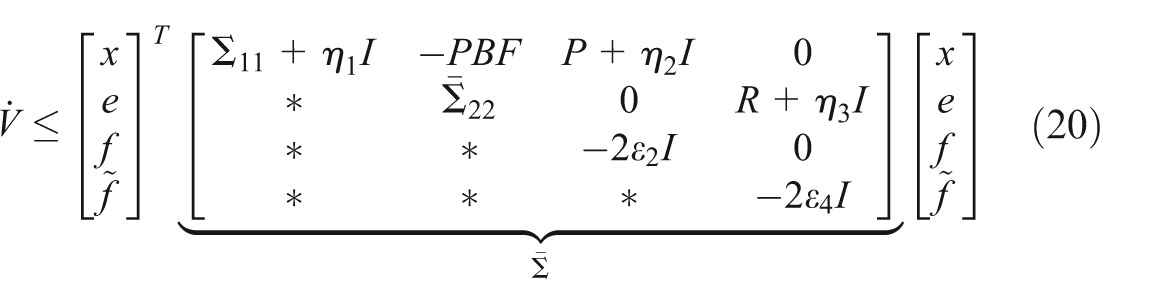
where



From equation (20), we know that
Let us define

where

Consequently, by developing

where

Using Lemma 1, we get the following inequality
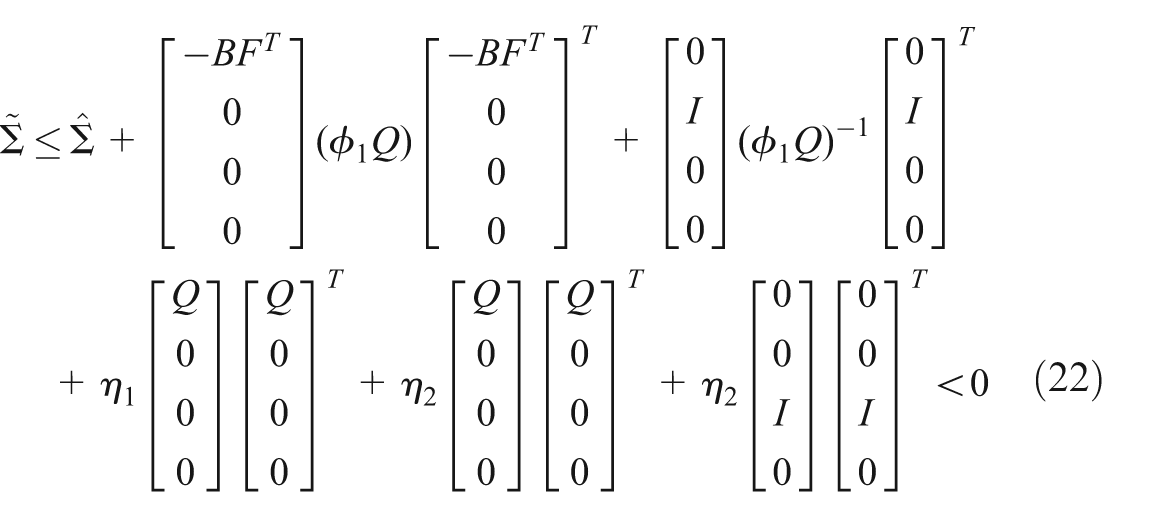
where
Next, in order to retrieve the variable

Notice that the right side of equation (23) has the following form

provided that
It should be mentioned that equation (12) is not a standard LMI form because in its blocks there exist some terms like
Remark 1
In order to transfer the matrix inequality (12) into an LMI form, we need to make a suitable choice of

and

Hence, equations (25) and (27) can replace the blocks
Corollary 1
Consider system (1) satisfying the Lipschitz condition (2). Let the observer-based output feedback controller be constructed in the form of equation (6). Then the closed-loop system (9) is asymptotically stable if there exist some matrices

where




Furthermore, the resulting observer gain matrix K and the output feedback control gain matrix F are, respectively, given by
It should be mentioned that there exist some terms like
Remark 2
Using a similar technique as in Remark 1, we can formulate equation (27) into an LMI. Indeed, if
Remark 3
In order to choose a suitable

This implies that
Application to flexible link manipulator
In this section, we study the application of the observer-based output feedback controller proposed in section “Observer-based stabilization design.” Consider a one-link flexible joint manipulator actuated by a direct current (DC) motor, whose dynamics can be described as follows (see, for example, Zhu and Han 7 and Raghavan and Hedrick 11 )
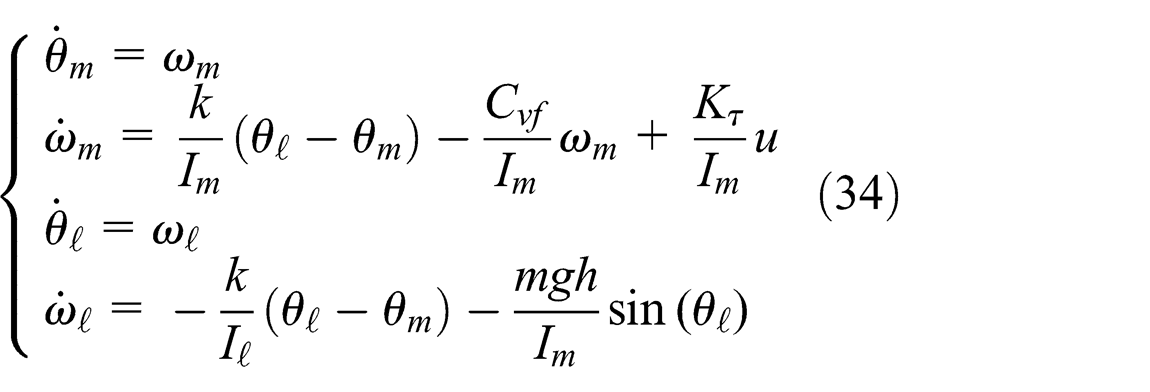
where
Manipulator parameters.

For such a manipulator system, we can easily measure the position and velocity of the motor, but the other states are difficult to measure directly. In practice, usually we need to design a state observer first and then use the estimated state to design the output feedback controller. Using the parameters in Table 1, system (34) can be rewritten in the form of equation (1) with


In this case, it is easy to verify that conditions (3) and (4) are satisfied with

and

Let the initial conditions be

Simulation for states x 1 and x 2 and their estimate.

Simulation for states x 3 and x 4 and their estimate.

Simulation for the estimation errors of x 1 and x 2.

Simulation for the estimation errors of x 3 and x 4.
Conclusion
In this work, we have proposed an observer-based output feedback controller for a generalized Lipschitz nonlinear system that satisfies the one-sided Lipschitz and the quadratically inner-bounded conditions. With the help of the LMI-based observer design approach and using Young’s relation, we have established some LMI-type synthesis conditions that ensure the existence of observer-based output feedback controller design. Moreover, we applied the proposed observer-based control design to a flexible link manipulator system. We used MATLAB platform to simulate the dynamic response of the closed-loop system. The simulation results showed that the whole system has good performance under the developed control design scheme. The further work should investigate the digital implementation of the observer-based output feedback controller.
Footnotes
Academic Editor: Hamid Reza Shaker
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Nature Science Foundation (Nos 61473129 and 51505273) and the Foundation of Shanghai University of Engineering Science (Nos nhky-2015-06 and 15KY0117).