
Abstract
In this article, we develop a new definition of fractional derivative under interval uncertainty. This fractional derivative, which is called conformable fractional derivative, inherits some interesting properties from the integer differentiability which is more convenient to work with the mathematical models of the real-world phenomena. The interest for this new approach was born from the notion that makes a dependency just on the basic limit definition of the derivative. We will introduce and prove the main features of this well-behaved simple fractional derivative under interval arithmetic uncertainty. The actualization and usefulness of this approach are validated by solving two practical models.
Keywords
Introduction
Fractional calculus has been used widely to deal with some engineering problems in recent years.1–11 The main advantage of fractional derivatives lies in that it is more suitable for describing memory and hereditary properties of various materials and processes in comparison with classical integer-order derivative. Moreover, the application of noninteger derivative has also been disseminated into the governing engineering models, and the curiosity of the scientists will achieve more in this area.12–17 However, some objection has been revealed for the slightly burdensome mathematical formula of its definition and the resultant complexities in the solutions of the differential equations of fractional order. Khalil et al. 18 proposed a new fractional derivative that has some basic characteristics of the first-order derivative such as the product rule and the chain rule which seems more appropriate to describe the behavior of classical viscoelastic models under interval uncertainty. This new concept was followed up by Abdeljawad 19 to introduce conformable Gronwall’s inequality, conformable exponential function, and conformable Laplace transform. Afterward, Batarfi et al. 20 employed this new fractional derivative for three-point boundary value problems, and then the concept of the conformable timescale fractional calculus was proposed by Benkhettou et al. 21
In many mathematical models of several crisp common world incidents in nature, a number of dynamical systems take control by ordinary differential equations (ODEs) in the presence of uncertainty. In practical dynamical systems, a collection of uncertainties is fundamental in the current state of the system, parameters, material properties, fraction tolerance, trajectories, and geometric dimensions, due to the complicatedness of physical-world problems. Uncertainties may lead to noticeable alterations of system dynamic feedback, specifically for mechanical dynamic systems. A considerable number of research papers have already been published incorporating various uncertainties in mechanical dynamic systems.22–24 However, there is no report for applying the interval arithmetic with uncertainty in any physical model.
Probabilistic methods25,26 have been extensively employed to a class of uncertain models, in which the uncertain variables are usually described as stochastic parameters with accurate probability distributions, under the hypothesis of perceiving total facts. However, it is not continually feasible to acquire the complete statistical data to explain probability distribution functions in physical models.
The interval-valued arithmetic and interval differential equations (IDEs) are the particular cases of the set-valued analysis and set differential equations, respectively. Interval arithmetic provides a possibility to measure uncertainties for uncertain variables regarding the lack of the knowledge of the complete information of the system. In recent times, the interval techniques have been attained much scrutiny and are encountering a huge demand in the field of uncertain analysis.27–30
The concept of Hukuhara derivative of set-valued mapping, presented by Hukuhara, 31 is rigorously combined with the theoretical foundation of IDEs and fuzzy differential equations (FDEs). The notion based on Hukuhara derivative has the drawback that any solution of a set differential equation has increasing length of its support. To overcome this situation, Stefanini and Bede 32 suggested a conception of generalized Hukuhara differentiability of interval-valued mapping based on the definition presented in Bede and Gal, 33 which permits them to achieve the solutions of IDEs with diminishing diameter of solution values. Thereafter, several researchers focused their investigations on the IDEs and FDEs with this new type of differentiability.34–40
In contrast to the crisp fractional calculus, the research works in the theory of the uncertain noninteger calculus are in the stage of infancy. Limited works have been done which are still traceless in the literature.5,41–50 This partially motivated us to confine our focus to develop the new discussed fractional derivative for solving fractional IDEs. We introduce, for the first time in the literature, this new concept under interval uncertainty to cope with the solutions for the problems exhibiting high-level uncertainties. The new features which are proposed and proved in this study can be applied easily to express the behavior of the uncertain fractional dynamic systems based on the interval arithmetic.
This article is arranged as follows: In section “Preliminaries,” we recall the most essential definitions from the interval arithmetic and fractional derivatives that will be used in the sequel. In section “Main results,” we develop the new fractional derivative under generalized Hukuhara derivative for interval-valued functions. Some distinguishing features of these derivatives are introduced and proved in this section. To show the well-posedness of the considered fractional derivative, some concrete cases are solved in section “Applications.” In the final section, the outcomes are surveyed and some points for the future research are recommended.
Preliminaries
In what follows, we draw some recent and necessary notions about differentiation of interval-valued and fuzzy functions (see, for example, Stefanini and Bede 32 and Stefanini. 38 Also, we review definition of the fractional conformable derivative with its features. A comprehensive study of the fractional derivatives can be found in Baleanu et al. 1 and Diethelm. 2
Interval arithmetic
Let

Note that for

The Hausdorff metric

for

for
Let
For

respectively. It is known that
If
If
If
If
As it was stated above, the H difference is unique, but it does not always exist. A generalization of the Hukuhara difference is proposed in Bede and Gal 33 to overcome this shortcoming.
Definition 1
The generalized Hukuhara difference of two fuzzy numbers

in which
Several alternative definitions exist for the differentiability of an interval-valued function. The most important concept is a particularization of the fuzzy concepts proposed in Lupulescu 51 to the interval case, based on the generalized fuzzy differentiability.
Definition 2
Let
For all

For all

For all
For all

Based on the gH difference, the generalized Hukuhara differentiability was introduced in Stefanini and Bede. 32
Definition 3
Let

If
We say that an interval-valued function
Proposition 1
Let
Proposition 2
Let
For all
If F and G are equally w-monotonic (i.e. both are w-increasing or both are w-decreasing), then
If F and G are differently w-monotonic (i.e. one is w-increasing and the other is w-decreasing), then
Proposition 3
If
Proposition 4
If

Fractional conformable derivative
We recall the conformable fractional derivative presented by Khalil et al. 18 Also, the paramount features of this derivative are reviewed.
Definition 4
Let

in which

Henceforth, for more simplicity, if the conformable fractional derivative of
Let
Let
Regarding the above circumstances, the following definition was suggested by Khalil et al.
18
for the
Definition 5
Theorem 1
Theorem 2
Let

Proof
In fact, using the definition of

Main results
In this section, the conformable fractional derivative of order
Definition 6
Let

Now, we investigate the continuity of
Theorem 3
Let
Proof
Due to the fact that

then
Set

Consequently, we finally obtain

which denotes that
Similar to Definition 3, we can state Definition 6 as follows:
We say that

We say that

Theorem 4
Let
Proof
The idea was introduced by Markov 52 for first-order IDEs. In fact, using Definition 6, we have for the case of w-increasing

Also, it is easy to verify that

Indeed, for the case of w-decreasing, the proof is similar as above and we omit it.
Remark 1
It is worth noting here that the result of Theorem 4 coincides with Proposition 1 for
Theorem 5
Let

for a.e.
Proof
Using the definition of integrability, differentiability, and Theorem 4, the proof is straightforward.
Remark 2
It should be mentioned that the result of Theorem 5 coincides with Proposition 4 for
Remark 3
We suppose that the following propositions for simplicity of the presentation:
S1. For
S2. For
Now, we extend Theorem 5 stated in Bede et al. 53 to the aforesaid fractional derivative case under interval settings theory.
Theorem 6
Let
If
If
If
If
If
If
Proof
We prove Cases 2 and 3. The proofs for the other cases are obtained analogously to the demonstration of the proof of those two cases.
Case 2
Due to the

Moreover,

In fact, equation (5) is the Hukuhara difference of

Then, we deduce that

Using the fact that

Therefore
In a closed discussion, one can easily obtain the following result

So,
Case 3
Based on the

Since

Indeed,

Using Proposition S1 and, consequently, the existence of

and similar to the previous case, taking the limit for both sides

Similarly, one can easily obtain

In fact, we establish that
Theorem 7
Suppose that
If
Proof
All the proofs are straightforward. So, we just prove Case 4 and the others are similar to this case.
Let

Using the same substitution as above, we have
Applications
We begin this section with the practical examples which reflect a part of motivations of our studying of the fractional interval initial value problem with generalized Hukuhara differentiability.
To obtain linear viscoelastic behavior, it is useful to consider the simpler behavior of analog mechanical models. They are constructed from linear springs and dashpots, disposed singly and in branches of two (in series or in parallel) as shown in Figure 1.54,55 Now, it is advantageous to consider the simple models of Figure 1 by providing their governing stress–strain relations along with the related material functions.
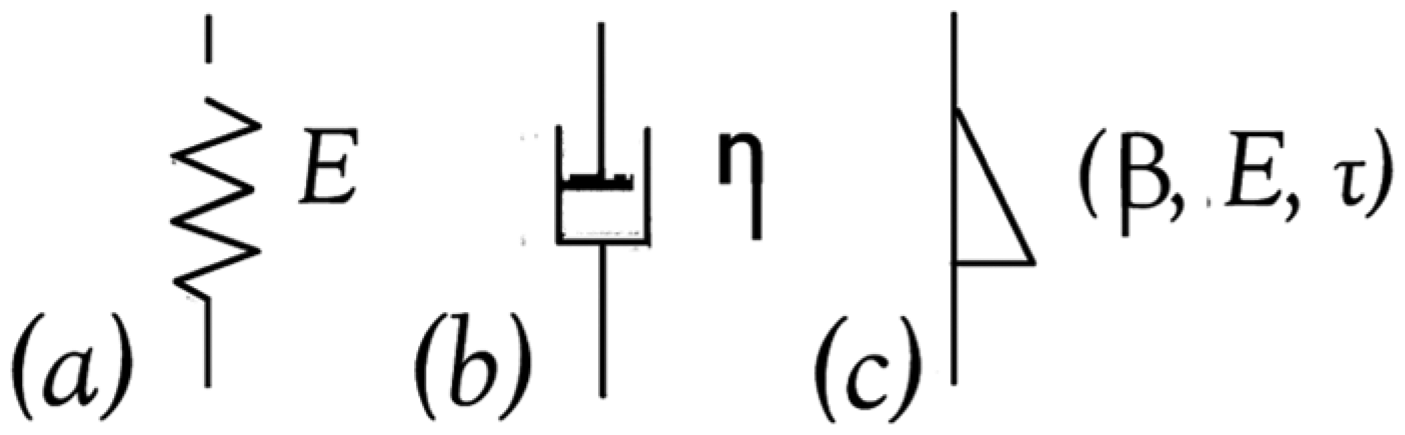
Single elements: (a) elastic, (b) viscous, and (c) fractional elements.
The Hooke model
The spring in Figure 1(a) is the elastic (or storage) element, as for it the force is proportional to the extension; it represents a perfect elastic body obeying the Hooke law. This model is thus referred to as the Hooke model which is given by

The Newton model
The dashpot in Figure 1(b) is the viscous (or dissipative) element, the force being proportional to rate of extension; it represents a perfectly viscous body obeying the Newton law. This model is thus referred to as the Newton model. Denoting by

In equations (6) and (7), E and
The Voigt model
A branch constituted by a spring in parallel with a dashpot is known as the Voigt model, as shown in Figure 1(c). We have

in which
The definite large part of viscoelastic variables in the actuality are specified just by ambitious notions which are dealt with by means of a common language. In the current section, we propose a new model using IDEs under strongly generalized differentiability concept. In this regard, the interval arithmetic exploited corresponds to frequency-dependent factors in the Kelvin–Voigt equations to depict the reality far better.
Example 1
Let us consider the following Kelvin–Voigt equation55,56 model based on the interval fractional conformable derivative (Figure 2)

in which

Trend of the solution of Example 1: (a) exact solution of Example 1 and (b)
In fact, Khalil et al. 18 stated that in order to obtain the solution of equation (9), under Riemann–Liouville differentiability, the problem must be as follows

Indeed, obtaining the solution under conformable fractional differentiability is much more simpler than Riemann–Liouville derivative. This is also valid under interval uncertainty. Now, we solve another case of the Kelvin–Voigt model in the sense of the interval arithmetic.
Example 2

in which
Under (

Thus, we obtain

In fact, using Theorem 6, Case 1, we have

Then, taking the conformable fractional integral for both sides and using Theorem 5, we have

Remark 4
It is easy to verify that

Trend of the solution of Example 2: (a) exact solution of Example 2 and (b)
Conclusion
A new fractional derivative with some simplifications in the formula and computations was proposed under interval uncertainty. We have developed the highlights of the conformable fractional derivatives which are more influential for the solution of fractional IDEs under generalized Hukuhara differentiability. In practice, a simple fractional derivative satisfying the main rules such as the product rule and the chain rule for the uncertain fractional differential equations simplifies considerably the cumbersome mathematical expressions of the mathematical modeling in the engineering sciences which was achieved in this article. In addition, to validate our claim and demonstrate the effectiveness of the proposed fractional derivative, two viscoelastic models were solved under interval uncertainty. Let us remark here that it is possible to extend the proposed definition for the fuzzy fractional differential equations under gH differentiability which will be considered by the authors as a future work.
Footnotes
Academic Editor: Hamid Reza Shaker
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors received financial support from Ministry of Higher Education (MOHE), Malaysia under FRGS for publication of this article.