
Abstract
This article evaluates the feasibility of two scenarios of phase transition signals, that is, the flashing green together with red–yellow light and the green countdown together with red countdown, at signalized intersections in terms of e-bike rider behavior. An evaluation framework is first proposed. During the phase transition, the stop-go and start-up behavioral parameters are collected at four intersections in Shanghai, China. Sensitivity analysis is then performed to identify the most significant factors that influence the occurrence of traffic conflicts during the phase transition. Based on the above analysis results, case studies were finally done to look into safety performance of the two scenarios of phase transition signals, indicated by the distributions of post encroachment time at the conflict point and the occurring probability of extremely small post encroachment times. Research result shows the transition signal combination of green countdown + red countdown tends to cause traffic accidents more easily and thus less safe compared to the transition signal combination of flashing green + red-yellow. Unlike the conventional method generally based on the deterministic traffic flow theory, the proposed methodology has a wide application. With the aid of it, traffic engineers are capable of designing transition signals in a more scientific manner.
Introduction
Electric bicycle, or electrically assisted bicycle (i.e. e-bike), is a type of green transport which wins its popularity with advantages such as high velocity and easy operation. The number of e-bikes in China has been increasing at an over 30% compound rate each year, while the number has exceeded a 100 million worldwide. Extensive use of e-bikes results in traffic chaos and safety problems at intersections. Statistic from Traffic Police Department of China shows that more than a half of the traffic accidents at intersections are related to e-bikes, and approximately 90% of these accidental e-bikes are involved in the phase transition from green to red. However, despite its higher accident rate in phase transition period, more attention has been given to red light and green light phases in traffic management, especially for electric e-bikes.
Phase transition refers to the time period between green phase and red phase, which serves as the transfer of right-of-way. It generally includes two forms: (1) yellow light, green countdown (GC), flashing green (FG), and so forth at the end of green phase and (2) red countdown (RC), red–yellow (RY) light, and so forth at the end of red phase. In Shanghai, the most commonly used forms are GC + RC and FG + RY. Green-to-red phase transition warns e-bike riders of the upcoming red light so as to avoid red light violations. Red-to-green phase transition indicates the riders of the upcoming green light with the purpose of reducing start-up delay. Thus, a rationally designed phase transition shall effectively improve safety and efficiency of the intersection. In reality, however, the feasibility of phase transition is still controversial due largely to the lack of standard guidance and scientific evaluation method in China.
This article studies on the feasibility of phase transitions based on comprehensive data of e-bike rider behaviors. Stop-go behavior model and start-up behavior model are developed to evaluate two scenarios of transition phase, that is, GC + RC and FG + RY. The purpose of these models is to improve the riding safety and efficiency at the same time. The study also provides theoretical and practical references to the design of signalized intersections.
Literature review
A great deal of study efforts have been made to improve the safety of the bicyclists at the mixed signalized intersections in the last decades. These studies can be mainly categorized into two fields, which are the characteristics of rider behaviors and the influence of the transition phase.
The characteristics of rider’s behaviors have been intensively studied with respect to the critical parameters. Bicycle’s start-up response time was investigated based on field data by Wang and Wei 1 and Dong et al. 2 It was found that bicyclist’s start-up response time is much smaller than that of motorist’s start-up response time, particularly if a red-and-yellow signal is applied. Taylor 3 and Whitt and Wilson 4 discussed the theoretical limits of bicycle’s braking deceleration rates, taking weather and safety constraints into consideration. A few other studies have attempted to explore the impacts of the bicycle rider’s characteristics, such as gender and age, on the behavior choices.5,6
On the other side, plenty of studies dealt with motorist’s behavior during transition signals. Knoflacher 7 compared deceleration rate with accident rates at intersections with FG transition phase. The study found that higher deceleration rate leads to higher probability of rear-end collisions. After observing driver behaviors during the FG, H Köll et al. 8 concluded that the FG transition phase can reduce dilemma zone while at the same time the rear-end accidents are increased. A comparative study between FG and the simultaneous display of green light and flashing yellow was done by Mahalel and Zaidel 9 through simulation. The results showed that the latter one reduces red light violations. Tang and Nakamura 10 developed a cumulative logit model to predict driver’s stop-line crossing time. They further evaluated the impacts of the group-based signal control strategy on driver behavior during the transition phase. 11
In addition, our research team has been focusing on bicycle rider’s behaviors and transition phase. We began with the comparative study of e-bike rider’s behaviors, in terms of the red light violation and start-up delay, during the green-to-red transition and the red-to-green transition. The results indicated that the GC shows larger potential hazard compared with the FG. 2 Our second study focused on comparative analysis of e-bike decision zones, which showed that the GC increased the complexity of decision-making, thus induced more wrong decisions. 12 We also studied the estimated time to the stop-line at the decision point, which is finalized as the dominant independent factor to stop-go decision of the e-bike riders. 13
In summary, previous research concentrated mainly on the effect of green-to-red transition or red-to-green transition separately. So far, there is no research that combined the influences of both. This, plus the consistency of our research, motivates the topic of feasibility study on phase transition signals of GC + RC and FG + RY from the perspective of e-bike rider behavior in the article.
Evaluation framework
The methodology of this study is summarized as a flow chart in Figure 1, including several main steps as follows.

Evaluation framework.
First, collect and preliminarily process data. Conflict data are extracted from two crossed parties during phase transition: one is the last vehicle in the former phase and the other is the first released vehicle in the next phase. The key parameters of the former party include vehicle’s approach speed, clearance speed, acceleration and deceleration rates, distance to stop-line when the phase starts to change, time point when vehicle passed the stop-line, and so on, while the latter party features mainly on start-up time, acceleration in start-up process, and so on.
Second, analyze the data listed above and develop a stop-go behavior model for the last vehicle in the former phase and a start-up behavior model for the first released vehicle in next phase. Third, establish a simulation model based on distributions of the parameters as well as the two driving behavior models (i.e. stop-go model and start-up model). The post encroachment time (PET) is selected as a comprehensive index to validate the simulation model. Then the sensitivity of the simulation model is analyzed. The multiple regression model is used to identify the significantly contributory variables to PET and their contributory degree.10,13,14 Finally, by setting the threshold of critical PET as 2 s 10 to the PET distribution curve, the feasibility of the two combined phase transition GC + RC and FG + RY is evaluated by Monte Carlo simulation (MCS) at selected intersections.
Data collection and reduction
Conflicts’ types
The conflicts can be classified into two types, as shown in Figure 2: one is the clearing through e-bikes and the opposing entering left-turn vehicles (see Figure 2(a)) and the other is the clearing left-turn vehicles and the entering through e-bikes which often starts up before onset of green light (see Figure 2(b)).
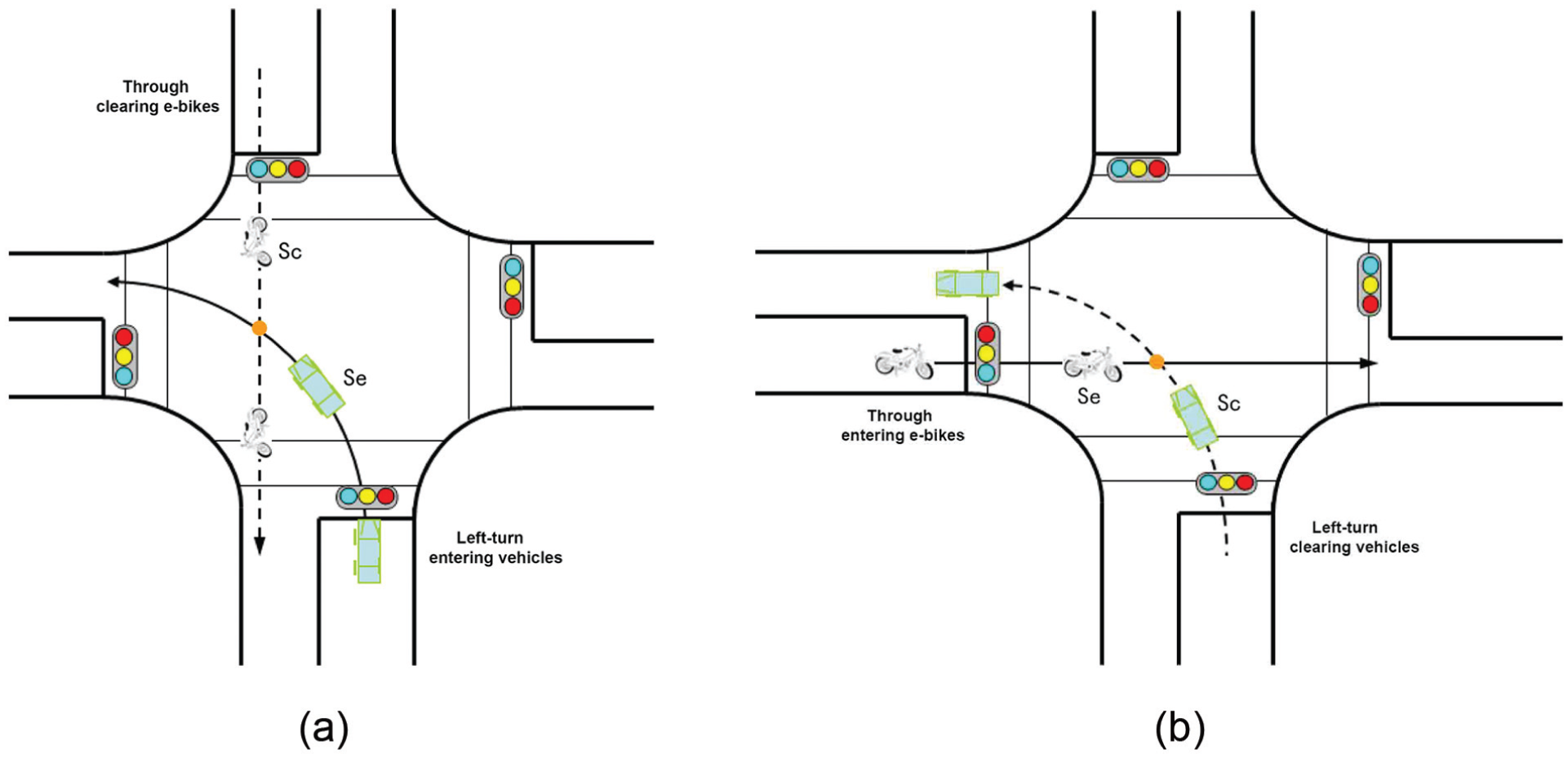
Traffic conflicts between e-bikes and vehicles at intersections: (a) traffic conflict between through clearing e-bikes and left-turn entering vehicles and (b) traffic conflicts between left-turn clearing vehicles and through entering e-bikes.
Site description
The feasibility study of transition phase requires accurate individual driving behavior data which is obtained by field survey. Thus, four intersections in Shanghai have been chosen as these sites applied either GC + RC or FG + RY transition phase. 12 Major characteristics of these four intersections are summarized in Table 1.
Characteristics of the observed intersections.

FG: flashing green; RY: red–yellow; GC: green countdown; RC: red countdown.
Data collection and reduction
Field survey was conducted during off-peak hours from 12:00 to 16:00 on a normal weekday and under good weather condition. Two high-resolution cameras were used: one camera was placed on building at a height of 20 m, approximately 60 m upstream of the intersection and facing toward the approach lanes. The purpose of this camera is mainly to obtain trajectories of e-bikes and motorized vehicles of the entire stop-go process as they approach the intersection. The other camera was positioned at the roadside of the approach lane, aiming to record the trajectories of e-bikes and motorized vehicles within the intersection. The signal timing and phase transition will be collected at the same time.
An image-processing software was utilized to extract trajectory data of e-bikes and motorized vehicles. By the input of the raw discrete trajectory, the software can automatically reconstruct a complete vehicle/e-bike trajectory with high accuracy. The image-processing software also reported PET data, which is calculated by the time difference between two conflicted parties at the conflict point (where the two trajectories crossed). Detailed video shooting and processing can be found in the authors’ previous work. 13 After synchronizing the trajectories of vehicles and e-bikes with the signal timing and phase transition, 315 valid vehicle and e-bike events for green-to-red phase transition scenario and 400 for red-to-green phase transition scenario were finalized for model specification.
Model development
Statistical analysis of rider behavior
In order to evaluate the feasibility of phase transition, statistical analyses were conducted for key characteristic parameters involved in e-bikes and vehicles, which includes approach speed, estimated time to the stop-line, speed at the decision point and distance to stop-line in clearing behaviors, and acceleration rate and reaction time in start-up behaviors. Typical statistics, including mean value, standard deviation, distribution, and confidence level, were calculated for such characteristic parameters and are summarized in Table 2. Note that the time passing the stop-line at the onset of yellow is 0, and start-up time at the onset of green is 0.
Key behavioral parameters of e-bike riders under two scenarios.
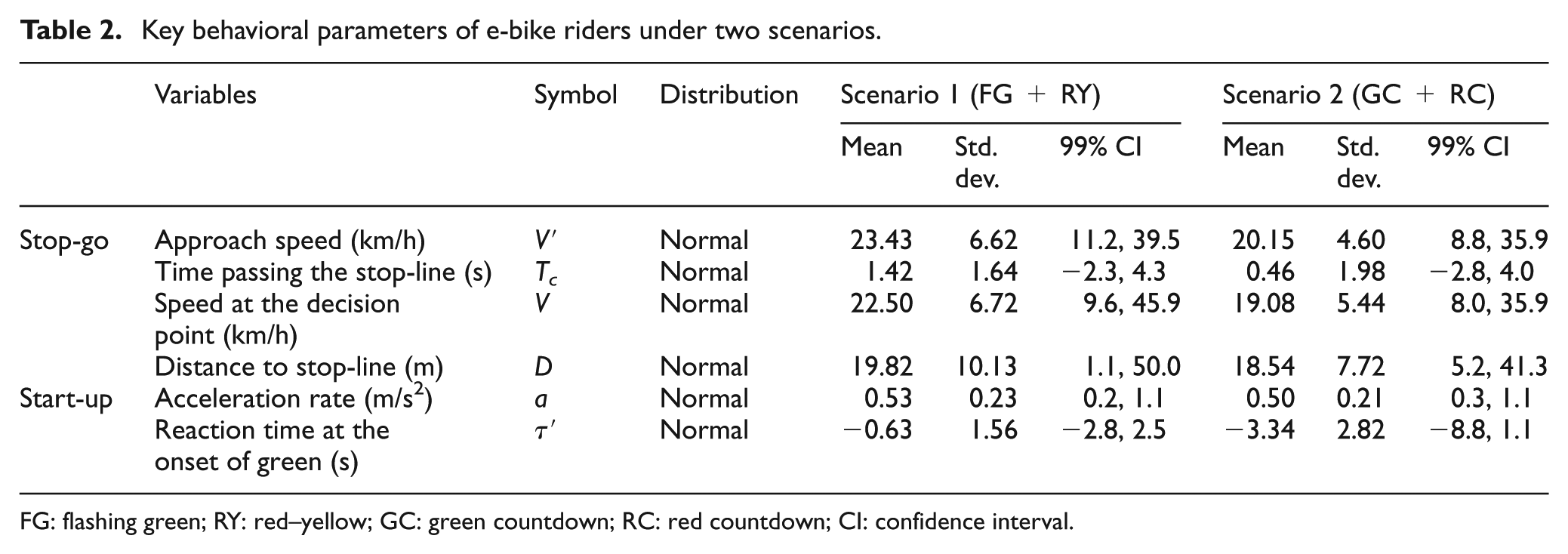
FG: flashing green; RY: red–yellow; GC: green countdown; RC: red countdown; CI: confidence interval.
Stop-go behavior models
To further explore the impacts of FG and GC, binary logistic regression models were developed to interpret the stop-go decision behavior of riders at the onset of yellow light. Previous study indicates that riders tend to make comprehensive judgment before they decide to stop or go according to their approaching speed V and the distance to the stop-line D. 13
The stop probability of a rider at the decision point is calculated using a logistic regression function given in equation (1). The estimated model coefficients are highlighted in Table 3

where Pstop is the stopping probability; α is the constant; βi is the estimated coefficient for variable, i is 1 or 2; V is the speed at the decision point (m/s); and D is the distance between the decision point and stop-line (m).
Stopping probability models in terms of decision-making time.
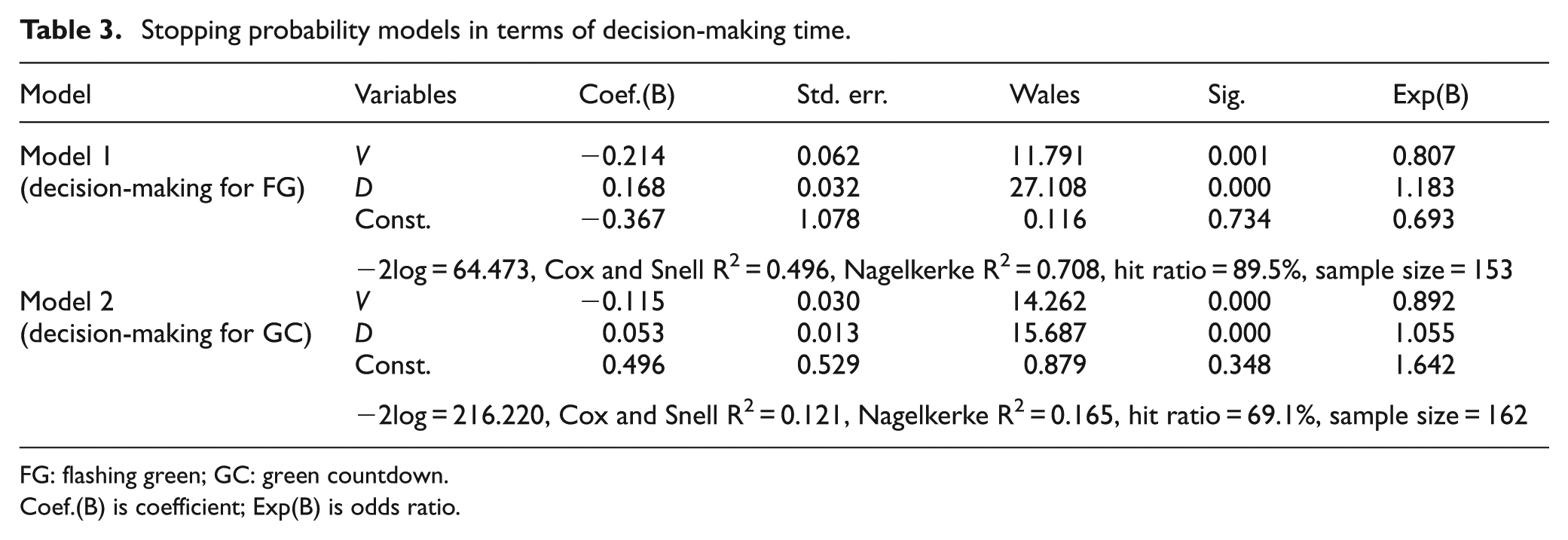
FG: flashing green; GC: green countdown.
Coef.(B) is coefficient; Exp(B) is odds ratio.
It can be found that both V and D have significant impacts on the stopping probability of riders. Also, riders are more sensitive to approach speed V as compared with distance D.
TTS is potential time, that is, the time to stop- line, if the driver continues with unchanged speed from the first possible decision point. Figure 3 displays the relationships between the stopping probability and TTS for FG and GC. It shows that the stop probability for GC is greater than that of FG under the same TTS value when TTS is less than 11 s.

Stopping probability as a function of TTS for FG and GC.
Start-up behavior models
A temporal–spatial model (i.e. start-up trajectories around the onset of green light) was employed to explain the relationship between driving distance and start-up time. Trajectories data were standardized to eliminate disparities in start-up time among different start-up types. Besides, the final point of a start-up curve was identified as the time passing the intersection, which accounts for the influences of traffic flows at the exit lanes. E-bike start-up trajectories at the onset of green light are presented in Figure 4.
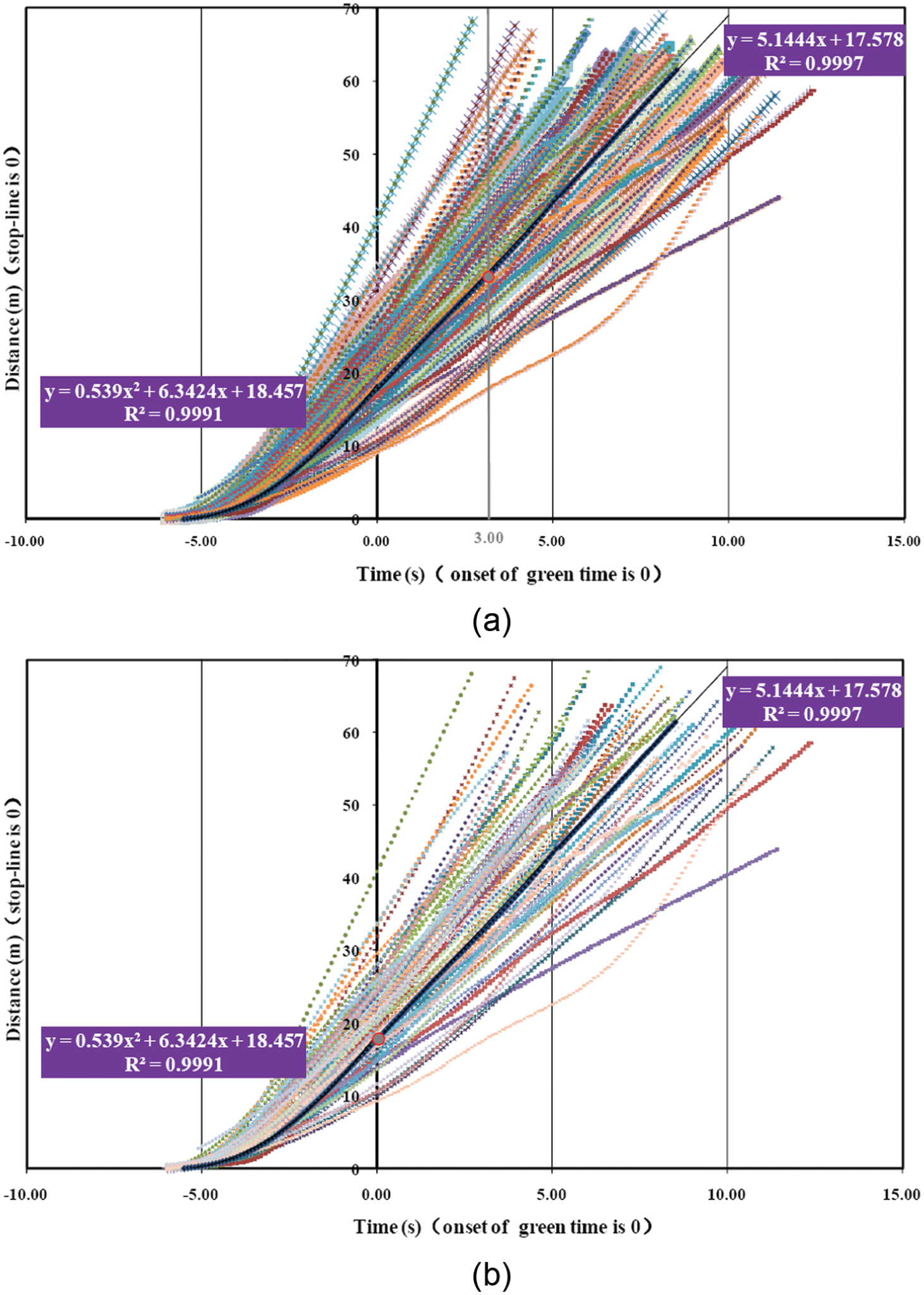
Observed and estimated start-up trajectories of e-bikes: (a) start-up trajectories for RY and (b) start-up trajectories for RC.
Trajectories in the temporal–spatial model start from the moment when e-bikes start-up and end when they exit the intersection. The x-coordinate represents the time in the process of start-up, while the y-coordinate represents the distance to stop-line accordingly. The relationships between the dependent variable (y-axis) and the independent variable (x-axis) are expressed in equations (2) and (3) for RY phase transition scenario and in equations (4) and (5) for RC phase transition scenario, respectively. These equations show that the start-up process could generally be divided into two parts: the process of initial acceleration and the state of smooth ride.
Start-up model for RY


Start-up model for RC


Sensitivity analysis
Model validation based on MCS
MCS technique is adopted in this study to perform sensitivity analysis. MCS method is a class of computational algorithms that rely on repeated random sampling to compute results. It is applicable when an exact result with a deterministic algorithm is infeasible or impossible. 13 Recently, MCS has been widely used in the field of traffic engineering.14–17 The conduct of feasibility analysis for phase transition could not merely rely on field data not only because of their high cost in data acquisition (in the respect of manpower and material resources) but also due to their lack of objectivity and portability for feasibility evaluation in the presence of small probability events such as serious conflicts. In summary, the sensitivity analysis follows the following four steps:
Step 1: the major characteristic parameters, including approach speed, stop-line crossing time, acceleration rate, and reaction time at the onset of green light. The distributions of the inputs and successive model to perform the MCS are provided in the previous section of this article.
Step 2: validation of MCS. Obtain the calculated occurrence rate of critical PET < 2 with 5000-time repeated runs, compare the calculated rate and the observed rate to verify the validity of MCS, and finally complete model validation by adjusting critical parameters.
Step 3: conduct sensitivity analysis based on the frequency distribution of PET and a multiple regression model. Determine key sensitive parameters to PET and obtain percentage contribution of PET.
Step 4: calculate the frequency of clearance failure. In this step, N (PET < 2) represents the counts of serious conflict between vehicles and e-bikes. After a 5000-time runs, the probability of critical PET equals to N (PET < 2) divided by 5000. Use MCS to obtain the PET in terms of conflict traffic flows.
As shown in Figure 5, the distribution curve of simulation data agrees well with that of the observation data, indicating an effective performance of the simulation model.

Frequency histograms and cumulative probabilities of measured and observed PETs.
Sensitivity analysis of input variables
Rider behavior of the last clearing vehicle during green-to-red phase transition (characterized by stop-line crossing time, approach speed, and distance to the stop-line) and the first entering vehicle during red-to-green phase transition (characterized by reaction time at the onset of green and acceleration rate) are associated with the PET.
One objective of sensitivity analysis for PET is to identify the sensitive variables. A multiple regression model was applied for the sensitivity analysis of PET. The regression model is given in equation (6) and the estimated model coefficients are presented in Table 4

where a is the acceleration rate (s), τ is the reaction time at the onset of green (s), Tc is the time passing the stop-line (s), V′ is the approach speed (km/s), and D is the distance to stop-line at decision point (m).
Estimated coefficients and parameters of the regression model for PET.

It shows that V′, Tc, a, and τ are statistically significant factors that influence the occurrence probability of risky behavior at the confidence level of 99%. Among which V′, Tc, and a have negative relationships with the PET, while τ is positively related to it. This indicates that the conflicts are highly relevant to e-bike riders’ start-up time and behavior disparities, apart from rider stop-go behavior in the end of green light phase.
The other objective of sensitivity analysis for PET is to find out which parameters have the greatest impact on the dependent variable, the degree of PET. The analytic hierarchy process was then adopted to achieve this objective, as shown in the result in Figure 6.

Percentage contributions of input variables to PET.
Figure 6 presents the percentage contribution of the four major inputs, which are consistent with the regression coefficients shown in Table 3. It was found that Tc is the highest contributory factor, 84.8%, followed by a, 10.4%, τ, 3.6%, and V′ contributes the least, 1.2%. The high percentage contributions of Tc and a indicate that motorized vehicle and e-bike conflicts not only relate to phase transition but also to vehicles’ driving behaviors, which conforms with the reality in most cases.
Feasibility analysis
Based on MCS constructed by the selected parameters and models, we can obtain PET of conflict traffic flows. Figure 7 shows PET percentage and PET cumulative percentage curve of all observed conflicts. Table 5 shows statistical characteristics of PET and probability of critical PET for GC + RC and FG + RY, respectively.

Comparisons on distributions of PET for FG + RY and GC + RC.
Comparisons on statistical characteristics and probability of critical PET.

FG: flashing green; RY: red–yellow; GC: green countdown; RC: red countdown; PET: post encroachment time; CI: confidence interval; K-S: Kolmogorov-Smirnov Test.
Figure 7 shows very similar distributions of PET for the two FG + RY and GC + RC scenarios. The percentage of PET arises first (tops at the 5–6 s interval) and then decreases, indicating that there is not essentially difference of riders’ stop-go decision-making mechanism at the approach between FG + RY and GC + RC. Specifically, PET occurrence percentage of GC + RC is significantly larger than that of FG + RY when PET < 3 s and PET > 7 s, while it is the opposite when PET lies within 4–7 s, suggesting a higher dispersion of PET for GC + RC. The reason behind could be that countdown signals provide to riders with earlier notice of signal switching, which might cause more uncertainty in the riders’ stop-go decision-making process for the GC phase transition scenario and cause larger deviation among start-up behaviors for the RC phase transition scenario (where aggressive riders tend to start-up before phase turns to green while conservative riders would prefer to wait till phase changes).
PET value should be selected to conduct further feasibility study for the two combined phase transition scenarios. If the conflicting vehicles are regarded as independent individuals, approach speed and acceleration rate would be constant before they reach the conflicting point. Based on this assumption, serious conflicts caused by clearance failure or vehicle’s early arrival could be defined by setting a threshold of PET. By this way, the probability of a serious conflict can be estimated by calculating the occurrence rate of critical PET values. Previous studies 15 recommend a threshold value of PET at 2.0 s in determining whether a motorized vehicle and e-bike conflict is serious or not. In addition, the critical PET values account for 4.2% for GC + RC scenario and 1.1% for FG + RY scenario, which indicates the latter is safer than the former regarding potential serious conflicts.
Conclusion
Some main conclusions are drawn based on comparison analysis of the two different phase transition scenarios:
Compared to FG + RY, GC + RC has a higher probability of traffic accidents, which denotes a less safe scenario. Countdown signal should be used with caution from the perspective of protecting the more vulnerable e-bike riders.
Contributory factors such as approach speed, time point when vehicle passed the stop-line, acceleration rate, and reaction time at the onset of green play important roles in the vehicle and e-bike conflict. Therefore, in addition to traffic facility improvements, traffic management such as limiting the approaching speed is an efficient way to improve the safety of the mixed traffic intersections.
The proposed methodology in this study is easy to apply to mixed traffic intersections. This makes the analysis of phase transition possible for different traffic conditions and geometric conditions.
As the feasibility evaluation of this article is based on the study of microscopic driving behavior characteristics, future study might improve the work by obtaining a larger sample with more diversified vehicle characteristics and expect to realize simulation of decision-making process.
Footnotes
Academic Editor: Yongjun Shen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study received grants from the Zhejiang Provincial Social Science Foundation of China (No. 15NDJC078YB) and the Ningbo Science Foundation of China (No. 2015A610298).