
Abstract
This article proposes a novel adaptive switching control of hypersonic aircraft based on type-2 Takagi–Sugeno–Kang fuzzy sliding mode control and focuses on the problem of stability and smoothness in the switching process. This method uses full-state feedback to linearize the nonlinear model of hypersonic aircraft. Combining the interval type-2 Takagi–Sugeno–Kang fuzzy approach with sliding mode control keeps the adaptive switching process stable and smooth. For rapid stabilization of the system, the adaptive laws use a direct constructive Lyapunov analysis together with an established type-2 Takagi–Sugeno–Kang fuzzy logic system. Simulation results indicate that the proposed control scheme can maintain the stability and smoothness of switching process for the hypersonic aircraft.
Introduction
Hypersonic aircraft always switch flight control signals while flying in a large range of space and change their flight states continuously. It is, however, more difficult to steadily and smoothly control the switching processes for the aircraft, with their rapid time variation, strong nonlinearity, strong coupling, and model uncertainty.1,2 Complex nonlinear systems cannot be well-controlled by means of traditional control methods, which will increase the difficulty of switching control. 3
The following are some methods that have been proposed to analyze and handle these problems. Stability of switched systems has been researched and analyzed in Lin and Antsaklis
4
and Zhang et al.
5
Zhang et al.
6
and Zhang
7
were concerned with the filter design problem for a class of switched system with average dwell time (ADT) switching. They were also concerned with
Interval type-2 Takagi–Sugeno–Kang (TSK) fuzzy,21,22 as a novel kind of fuzzy, has been proved to be more suitable to deal with uncertainty problems23,24 and has been widely used in control processes. Traditional type-1 TSK fuzzy logic system 25 has been used to resolve the control issue.26,27 It was often combined with some other methods to achieve adaptive and robust control of systems.28,29 However, as the system becomes more complex, especially for nonlinear systems, the exact fuzzy sets and membership functions are no longer enough to accomplish the task. Thus, type-2 TSK fuzzy logic controller arises and has undergone rapid development because of its ability to deal with problems of uncertainty more effectively.
Recently, type-2 TSK fuzzy has also been studied for controllers of nonlinear systems. An interval type-2 TSK fuzzy has been proposed to confront uncertainties for the supervisory adaptive tracking control of robot manipulators in the robot dynamics. 30 The structure of a type-2 TSK fuzzy neural system has been presented to handle uncertainties for identification and control of time-varying plants. 31
This article proposes an adaptive switching control of hypersonic aircraft based on type-2 TSK fuzzy sliding mode control. The proposed method is similar to the scheme for single-input and single-output (SISO) system in Hwang et al., 32 but the biggest difference between the proposed scheme and the reference is that the control plant in this article is a hypersonic aircraft, which has a multi-input and multi-output system of nonlinearity, variation, and instability with uncertain parameters.
The outline of this article is as follows: section “Background” presents the model structures of hypersonic aircraft and full-state feedback linearization as background. Section “Design of switching control” documents the design of the novel adaptive switching control in switching process. In section “Simulation of controller”, simulation studies are given to verify and analyze the effectiveness of the new switching controller. Finally, we present our conclusions in section “Conclusion”.
Background
The model of hypersonic aircraft
The hypersonic aircraft has features of rapid time variation, strong nonlinearity, strong coupling, and model uncertainty. The three views of X-24B configuration are shown in Figure 1.

Three views of X-24B configuration.
Using the longitudinal force and moment equilibrium of hypersonic aircraft, the longitudinal model of hypersonic aircraft 33 can be obtained as follows







In this model,




where
Uncertain parameters as an additional variance to the nominal values are used for controller design






Full-state feedback linearization
For a longitudinal nonlinear model of a hypersonic aircraft, the third derivative of
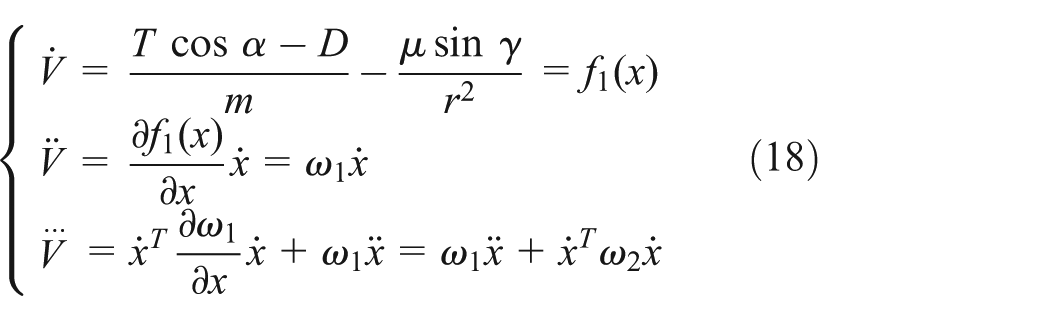

where the first, second, and third derivatives of

In equations (18) and (20),

where






where
The nominal control law is as follows

Design of switching control
We can get different control signals

where

The system structure of switching control is shown in Figure 2.
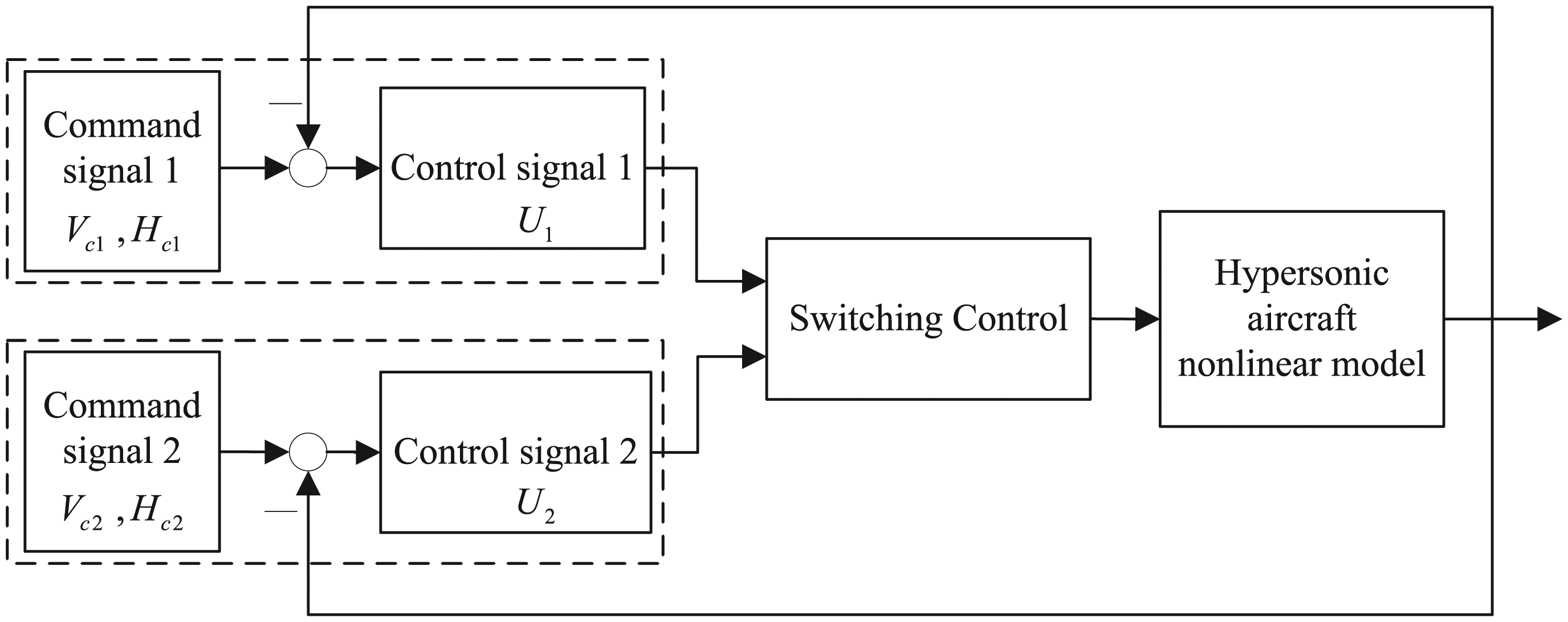
System structure of switching control.
As Figure 2 shows, for the block of switching control, the system structure of adaptive switching control based on type-2 TSK fuzzy sliding mode control is shown in Figure 3.

System structure of adaptive switching control based on type-2 TSK fuzzy sliding mode control.
As Figure 3 shows, control signals
Interval type-2 TSK fuzzy
The interval type-2 fuzzy, as a special case of type-2 fuzzy, is similar to type-1 fuzzy structure. The biggest difference between type-1 and type-2 fuzzy is the type reducer. The system structure of interval type-2 fuzzy is shown in Figure 4.
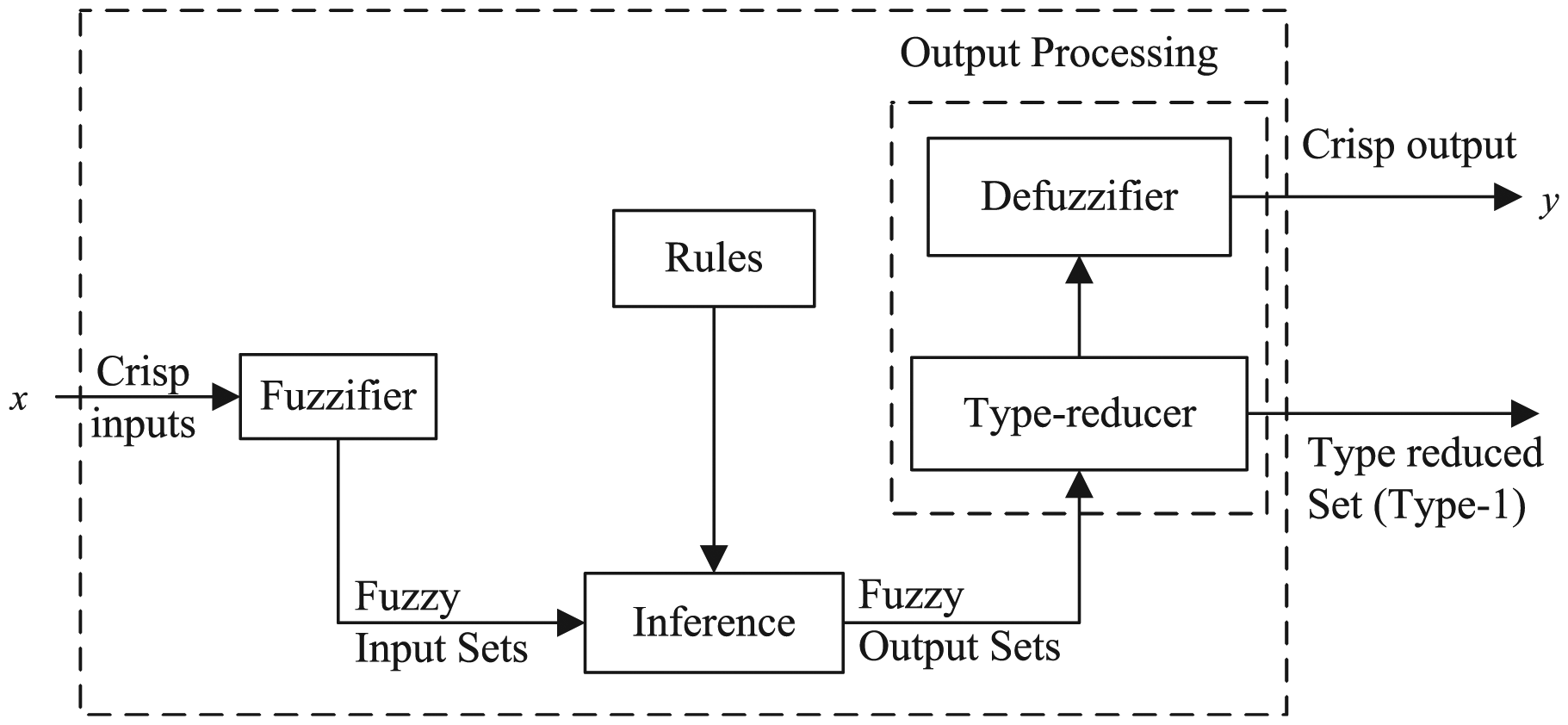
Structure of an interval type-2 fuzzy logic system (IT2 FLS).
In Figure 4, for the group of input–output data, there are two inputs,
where
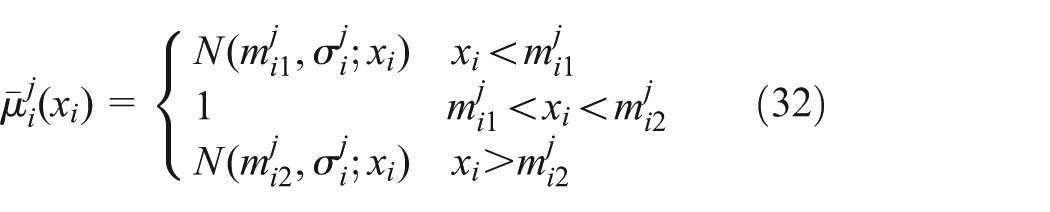
We use Gaussian primary membership function with an uncertain mean as the input membership function

where


The secondary membership function


where

where

For the type reducer in Figure 4, we use the center-of-set type reducer 35

In the A2-C0 case,
where
Type-2 TSK fuzzy sliding mode control
In the switching process, we define the sliding mode variables as

Then, we can obtain the derivatives of

We define

The output of type-2 TSK fuzzy control is
We use the Gaussian primary membership function with uncertain mean as the input membership function and the output membership function. We describe the ith rule of interval type-2 TSK fuzzy logic system as
Rule i: If
where
Define

From equations (37)–(40), we establish the control output as
where
Consequently, the control output is
where

in which



For the control signal
According to the universal approximation theorem,

where

Applying

Therefore, the adaptive switching control signal of type-2 TSK fuzzy sliding mode control can be expressed as

where
Stability analysis
According to equations (51) and (53),

in which
Therefore, equation (21) can be rewritten as

From equations (42), (43) and (56), we obtain

In order to prove the whole system stability, the Lyapunov stability theory is adopted. To make the sliding mode variables
where
The derivative of equation (58) with respect to time is obtained as

To achieve








Then,
which illustrates that the system is stable.
In order to overcome the chattering phenomenon, we replace the sign function with the saturation function

In this way, we can rewrite


Simulation of controller
Set up of experiments
Assume a hypersonic aircraft with the following model parameters and initial states:







In the climbing mode, the thrust coefficient and the fuel ratio are computed as follows


In the cruising mode, the thrust coefficient is

Initial states of the hypersonic aircraft flight are
Membership function parameters of input

Membership function parameters of input

Membership function parameters of input

Membership function parameters of input

Simulation of response to switching from climbing mode to cruising mode
When the hypersonic aircrafts switch from climbing mode to cruising mode, they have to switch their control signals. In the climbing mode, the velocity command signal is a ramp signal, of which the slope is 10 m/s2; the altitude command signal is a ramp signal, of which the slope is 75 m/s. In the cruising mode, the velocity command signal is 4590 m/s, and the altitude command signal is 33,528 m. Before 20 s, the hypersonic aircraft is in climbing mode. After 25 s, the hypersonic aircraft is in cruising mode. The switching occurs during 20–25 s. The control effects of switching from climbing mode to cruising mode are detailed in Figure 5.

Control effects of switching from climbing mode to cruising mode: (a) velocity, (b) altitude, (c) throttle setting, (d) elevator deflection, (e) angle of attack, and (f) flight path angle.
From the simulation results in Figure 5, we can draw the conclusion that the direct switch cannot keep the system stable, which illustrates the research on the control of switching from climbing mode to cruising mode is necessary. Because fuzzy control is suitable to resolve the uncertainty problems, so combined with sliding mode control, type-1 TSK fuzzy and type-2 fuzzy can keep the switching process stable. Compared with type-1 TSK fuzzy, type-2 fuzzy has more advantages that the uncertainties of its membership functions can increase the capability of dealing with uncertainty issues. Additionally, the adaptive laws tune the system adaptively to make the system stable faster. As a result, the switching process by using type-2 TSK fuzzy sliding mode control is smoother. Meanwhile, the track errors of switching and the elevator deflection are smaller, which verifies the switching performance of hypersonic aircraft is better. Type-2 TSK fuzzy sliding mode control proposed in this article can provide an effective adaptive switching control to realize the stable and smooth switching process.
Conclusion
This article presents a novel adaptive switching control of type-2 TSK fuzzy sliding mode control to maintain stability and smoothness in the switching process of control. The full-state feedback linearization is used to linearize the complex nonlinear model precisely. Considering the problems of parametric uncertainties, an interval type-2 TSK fuzzy logic control scheme is combined with sliding mode control to design a stable, smooth, and adaptive switching control for hypersonic aircraft. The fuzzy set structure of type-2 TSK fuzzy approach is found to be more suitable to resolve the aforementioned uncertainty problems. In order to formally establish stability, a constructive Lyapunov analysis approach is used in design of the control system. The effectiveness of the novel controller is illustrated by simulations of control effects of switching from climbing mode to cruising mode. The numerical simulation results indicate that the control scheme proposed in this article has stable and smoother switching performance.
Footnotes
Academic Editor: Zhijun Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This work was supported, in part, by National Natural Science Foundation of China (61304223), Funding of Jiangsu Innovation Program for Graduate Education (CXZZ13_0170), Funding for Outstanding Doctoral Dissertation in NUAA (BCXJ13-06), and the Fundamental Research Funds for the Central Universities.