
Abstract
The application of dimensionality reduction method on the reliability and reliability sensitivity analysis of vibration systems was examined. The dimensionality of a vibration reliability problem was reduced to only two independent dimensions by the means of polar transformation. As the safe and failure classes of samples are clearly distinguishable and occupy a standard position in a two-dimensional plot in the case that the important direction exists, the relevant samples are selected visually. The reliability and reliability sensitivity problems were solved using the position of the relevant samples. Before the reliability and reliability sensitivity estimation, an essential visualization analysis is conducted to examine the capacity of the method in terms of the existence of the important direction which is used to reduce the dimensionality of the reliability problem. In order to calculate the design point correctly, the improved Hasofer–Lind–Rackwitz–Fiessler method was extended with a procedure for determining the perturbation in the calculation of the gradient vector by finite differences according to the numerical precision of the limit state function. The dimensionality reduction method saves the numbers of calling limit state function a lot and has the same accuracy as Monte Carlo method. Examples involving single and multiple degree-of-freedom nonlinear vibration systems were used to demonstrate the approach.
Keywords
Introduction
The treatment of systems with uncertain structural parameters has become an increasingly important issue in many areas of dynamic analysis. The parameter uncertainties in dynamic systems are due to material irregularity, manufacturing tolerance, and measurement inaccuracies, which are usually modeled as random variables or stochastic process. The performance uncertainties of the systems such as displacements, stress state, and vibration frequencies should be studied effectively for design purpose. Because that the dynamic response of a mechanical system with uncertain parameters possesses probabilistic features which depend on the probabilistic distribution of the system parameters, the study of the stochastic responses of structures with uncertain parameters is of significant interest in many engineering applications. In recent years, a series of papers1–6 have shown that the failure problem of vibration systems can be solved by applying the computational tools of structural reliability methods. In these approaches, the failure event of a vibration system is expressed as implicit functions of the input uncertainties, that is, the limit state functions of the system. Structural reliability methods are then used to calculate the reliability of the vibration system. Reliability sensitivity analysis has been widely applied in reliability engineering design to estimate the effect of change in random variables on the probability of failure. It can help designer to establish acceptable parameter values on the structures and to select acceptable tolerances and parameters.7–9 In order to assess the effects of the uncertain parameters on the reliability of the vibration systems and to determine the main factors influencing the systems reliability, structural reliability sensitivity analysis methods have been widely applied.10–13 A source of difficulties for solving the vibration reliability and reliability sensitivity problems by means of approximate methods, for example, first-order reliability method (FORM) and second-order reliability method (SORM), is the structural nonlinearity. It is due to the fact that the surrogate of the limit state functions built by approximate methods may be inaccurate when the systems have strong nonlinearities. Despite Monte Carlo method (MCM) is the most general simulation technique, a large number of calling the limit state function is required in estimating probabilities of rare occurrence events and the numerical cost may be high, especially when the system is modeled using nonlinear differential equations. Different advanced simulation techniques have been developed to overcome the inefficiency of MCM, but the robustness of the methods remains to be improved. JE Hurtado 14 introduced the dimensionality reduction method (DRM) and applied it to structural reliability problems successfully. In this approach, the samples in the standard normal space are mapped to a two-dimensional (2D) plot defined by the polar features of the samples, that is, the length of the sample vector and the cosine of the angle that separates the sample vector and the important direction. Due to the fact that the safe and failure classes of samples are clearly distinguishable and occupy a standard position in the plot, the reliability problem is solved by a visually aided selection of the relevant samples. The method facilities the numerical computation of the reliability and has the same accuracy as MCM. However, it needs to be examined when applied to vibration reliability problems. A surrogate of the important direction is given by the design point vector, which can be determined by the well-known improved Hasofer–Lind–Rackwitz–Fiessler (iHLRF) method15,16 efficiently. When the limit state function is defined from a numerical model, for example, nonlinear differential equations, the gradient vector is computed approximately by finite difference, which may lead to errors if the perturbation is not correctly chosen. In the case that the shape of failure region is very involved, the existence of important direction is questionable. 17
In this study, the DRM is first applied to random vibration systems to reduce the dimensionality of the vibration reliability problem by transforming the excitation process into a finite set of standard normal random variables. Then, a visualization analysis is conducted to examine the clustering feature of the samples and the existence of important direction is extensively discussed by analyzing a Duffing oscillator. In order to reduce the number of times of calling the limit state function, the iHLRF method for finding the design point is extended with a procedure for determining the perturbation in the calculation of the gradient vector by finite difference according to the numerical precision of the limit state function. Based on these, an integrated strategy for reliability and reliability sensitivity estimation of random vibration system with random structural parameters is finally presented using the relevant samples in a 2D plot. Two numerical examples are used to demonstrate the accuracy and efficiency of the strategy and the effects of the structural random parameters on reliability of a multiple degree-of-freedom impacting system are finally studied.
Dimensionality reduction of vibration reliability problems
Vibration reliability problems in the standard normal space
It is known that the differential equations of motion of a vibration system can be written as follows

where t denotes the time;

where

the failure probability P
f = P{b < r(
Let

the failure probability P
f = P{G(
Polar transformation
Consider a sample


v 1 and v 2 are random variables and v 1 obeys the Chi density function with d degrees of freedom

where Γ (·) is the Gamma function. The density function of v 2 is derived by Hurtado 14 as follows

where

When the samples from the given space (u 1, u 2, ..., ud ) are mapped to the two-dimensional space (v 1, v 2), the vibration reliability problem is transformed to a problem of only two dimensions. This makes possible the visualization of the safe and failure classes of samples in a 2D plot.
Clustering of samples
The study by Hurtado 14 shows that the safe and failure class samples of several simple structural reliability problems are clearly distinguishable and occupy a standard position in a 2D plot. This kind of sample clustering makes it possible to solve the reliability problem by means of a visually aided selection of the relevant samples, which improves the efficiency of MCM a lot. Due to the fact that the vibration reliability problem may be more involved, the applicability of the method should be investigated.
Duffing oscillator subjected to white noise
Consider a Duffing oscillator defined by

where m is the mass, c is the damping, k is the linear stiffness, and γ defines the degree of the nonlinearity of the system. We study the linear case first with γ = 0 m−2 and the other parameters of the Duffing oscillator are set such that m = 1000 kg, c = 200π Ns/m, and k = 1000(2π)2 N/m. The excitation F(t) acting over the structure is white noise of 12 s of duration with intensity S = 106 N2 s/rad. A time step Δt (Δt = 0.01 s) is considered to discretize the excitation and then it can be described by

where uj is an independent standard normal variable and tj is the jth discrete time step such that tj = (j−1)Δt. The failure event is defined as the displacement of the oscillator at t 0 (t 0 = 12 s) exceeding a prescribed threshold b (b = 0.7 m). Then, the limit state function is defined as follows

where

where r F(t) denotes the free-vibration response of the oscillator, that is, the solution of equation (10) with the right-hand side set to zero and with initial conditions r F(0) = b. Figure 1 shows the design point of this problem.
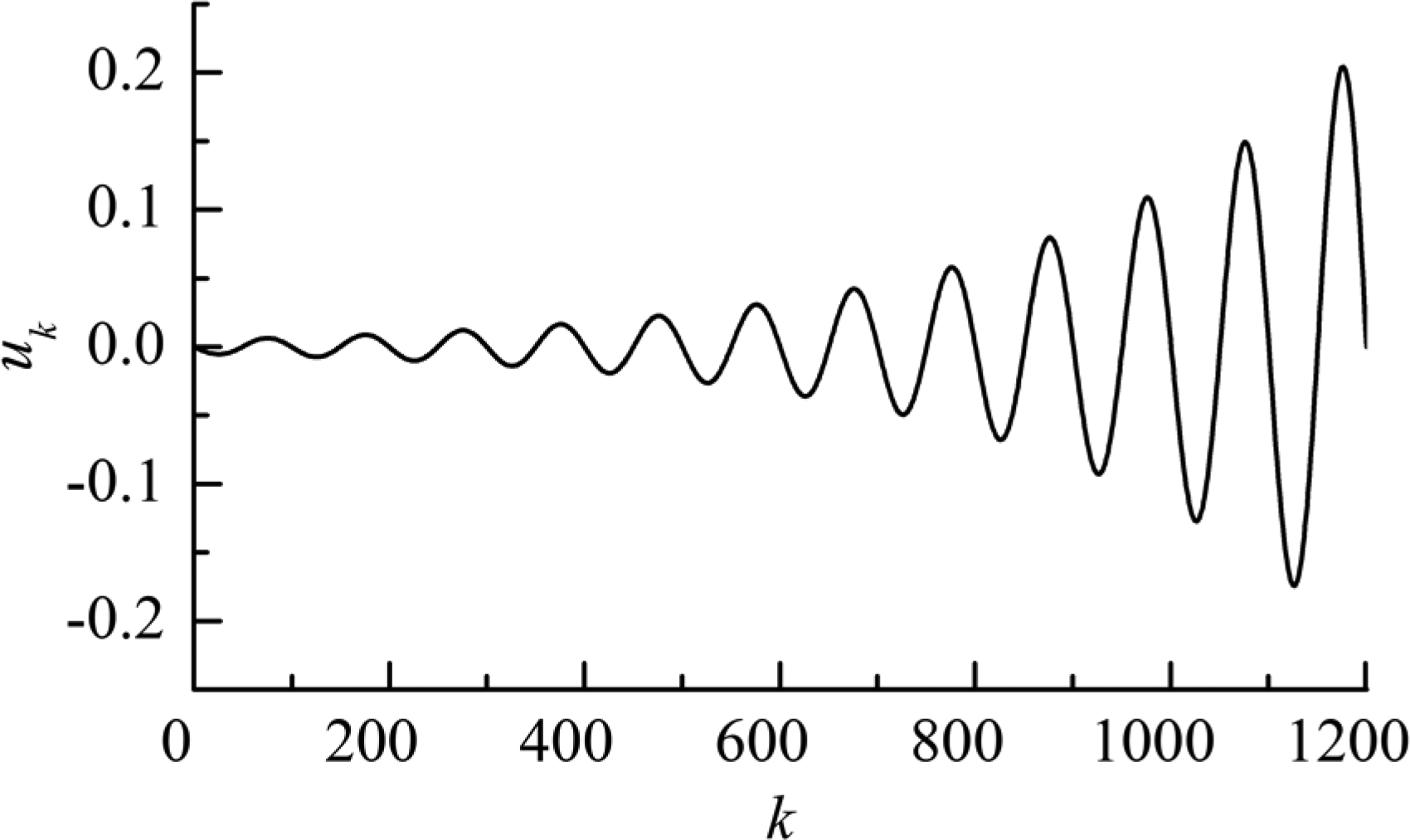
The coordinate value of design point for linear Duffing oscillator subjected to white-noise input.
Generate N (N = 10,000) samples in the 1201-D standard normal space, and the polar features of each sample are calculated by means of equations (5) and (6). The samples are then mapped to a 2D plot as shown in Figure 2 with their class labels calculated by calling the limit state function (12). It can be seen that there is a visual discrimination between the two classes of samples and the failure class samples are in the upper region of the plot, which is compatible with the conclusion of the study by Hurtado. 14

Dimensionality reduction of linear Duffing oscillator reliability problem.
Now consider the nonlinear case with γ = 1 m−2 and the threshold b is set such that b = 0.8 m. The design point for this problem is shown in Figure 3.

The coordinate value of design point for nonlinear Duffing oscillator subjected to white-noise input.
Overall, 10,000 samples with class labels are mapped to a 2D plot as shown in Figure 4. The sample clustering disappears and the failure class samples are irregularly distributed in the plot. As the design point is calculated accurately, the existence of an important direction for this specific problem is questionable.

Dimensionality reduction of nonlinear Duffing oscillator reliability problem.
Existence of important direction
Valdebenito et al. 17 studied the reliability problem of a nonlinear Duffing oscillator subjected to white noise employing the line sampling method, which is also an advanced simulation method 19 based on the important direction. It turned out that the performance of line sampling method using 50 lines was really poor, which was expected to be very efficient. In order to investigate the reasons, the behavior of the limit state function along each sampled line was studied. It showed that the value of the limit state function along the sampled lines was not only irregular or scattered, but also chaotic. Then, Valdebenito et al. 17 guessed that the failure region of this specific problem may be composed by disconnected regions or valleys connected by low probability paths.
The conclusion of the study by Valdebenito et al. 17 can explain the reason why the sample clustering does not exist in Figure 4, that is, the existence of an important direction for this specific problem is, at least, questionable. As the white noise is discretized and represented in the form of high-dimensional variables, the reliability problem of a nonlinear Duffing oscillator is involved. While for a vibration reliability problem which is not involved, for example, a vibration system whose excitation is defined by the random structure parameters only, the important direction may still exist as well as the sample clustering. Meanwhile, it is not appropriate to use the method proposed in this article if we get the wrong or inaccurate important direction for the samples that have no feature of clustering under this condition. The discussions above mean that the DRM can be applied to vibration reliability problems in the case that the important direction exists and one should pay attention when using it. And a visualization analysis should be conducted to make sure that the samples have the clustering feature for a specific problem.
Vibration reliability
The key of the DRM is the determination of the design point. The closed-form solutions of the design point for vibration reliability problems exist only in a few cases. In order to apply the method to more vibration reliability problems, a general method for determining the design point should be discussed.
iHLRF method considering numerical precision
For given t 0 and b, the design point of a vibration reliability problem is the solution to the constrained optimization problem in standard normal space

iHLRF15,16,20 method is the most popular algorithm used to solve this problem. In this algorithm, every new point

where n denotes the number of iteration, λ is the step size, and

where

the step size λ is defined by the Armijo rule as follows

where m A(·) is the merit function defined as follows

where c p is the penalty parameter and should satisfy

According to the chain rule, the partial derivative of the limit state function with respect to the standardized variable ui is as follows

where

where Δxi
is the perturbation and
Theoretically, the truncation error in equation (22) can be reduced using a small perturbation Δxi
. However, the value of the limit state function of nonlinear vibration problem is twofold: one part is deterministic and one part is random, resulting from the computational inaccuracies. It can be reasonably stated that the random part Δg(

where q is a magnifying factor, ε is the computational precision, εg(
Reliability
Once the design point has been determined, the DRM can be used to calculate the reliability of vibration systems. But initially, the samples will appear in the plot without the labels safe and failure which can distinguish them only when the limit state function has been called. In this article, a straight line is used to distinguish the two kinds of samples. The preliminary position of the straight line is defined by experience, 26 that is, for low d, the straight line is located in the upper-right sector and titled to the right, while for moderate or high d the line should be close to horizontal. The final position of the straight line is determined after calculating the labels of several samples nearby the initial line and then the samples above the straight line are considered to be failure class. Figure 5 shows the adjustment strategy of the straight line. The dotted line is the initial line and the full line is the final line. The arrows in the figure show the sequence of the samples to be calculated.
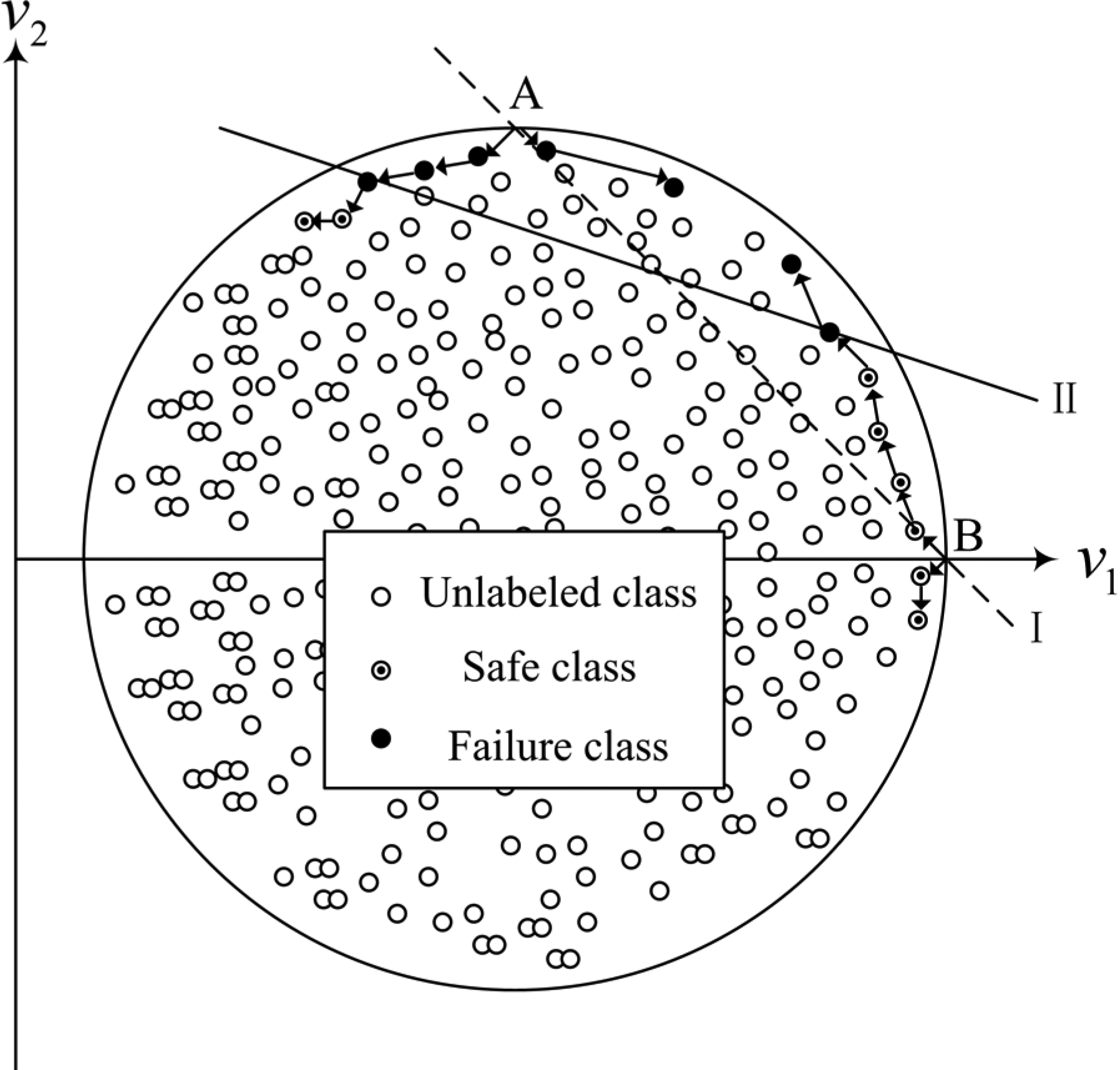
Schematic plot for adjustment strategy of straight line.
The failure probability P f is calculated by counting the number N up of the samples above the line

and the reliability is as follows

It is worth nothing that in the case the important direction does not exist, the DRM cannot be employed to calculate the reliability for that the failure class samples have no characteristics of clustering. But the existence of the sample clustering can be predicted simply by calculating the labels of several samples nearby the initial line.
Numerical example
Consider a single degree-of-freedom impacting system subjected to a horizontal acceleration

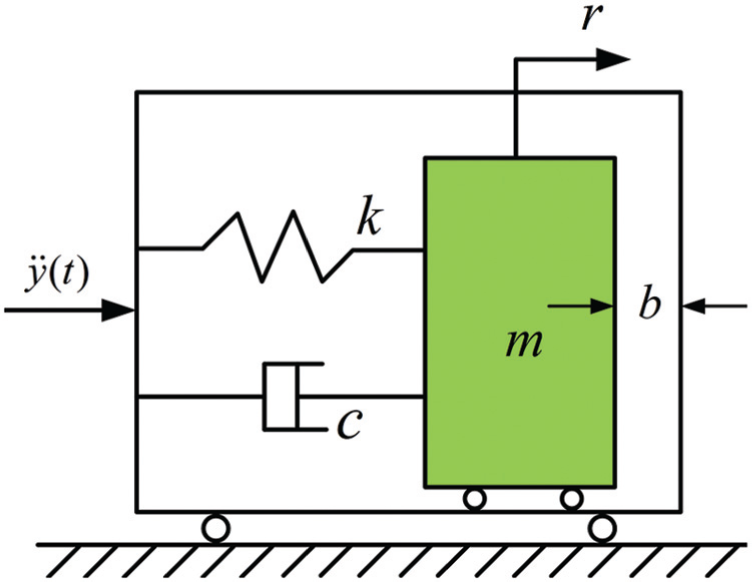
System model of single degree-of-freedom impacting system with strong nonlinearity.
there is a gap b between the mass m and the case wall. The stochastic differential equation is represented by

with initial conditions

where r
max(
The original variables

Straight line that separates the two classes of samples and samples above it.
There are 11 samples above the line; thus, the failure probability P
f = N
up/N = 0.0011. Table 1 shows the results of failure probability calculated by FORM, important sampling method (ISM), DRM, and MCM. N
s is the number of samples, N
c is the total number of calls of limit state function to calculate the reliability, P
f is the failure probability, and
Results of failure probability.

There are only three normal variables in this problem, but the system shows an extreme behavior because of the large value of γ. The reason for the poor performance of FORM is that the approximation of limit state function by a hyperplane is not appropriate due to the strong nonlinearity of the system. The ISM generates an estimator with sufficient accuracy but the numerical cost of the method is relatively high. The DRM almost has the same accuracy as MCM, which is also the most efficient. A visualization analysis is conducted to examine the existence of important direction for this reliability problem. Figure 8 shows that several samples above the straight line are all failure class, which indicates that the important direction exists and the result of design point vector is correct.
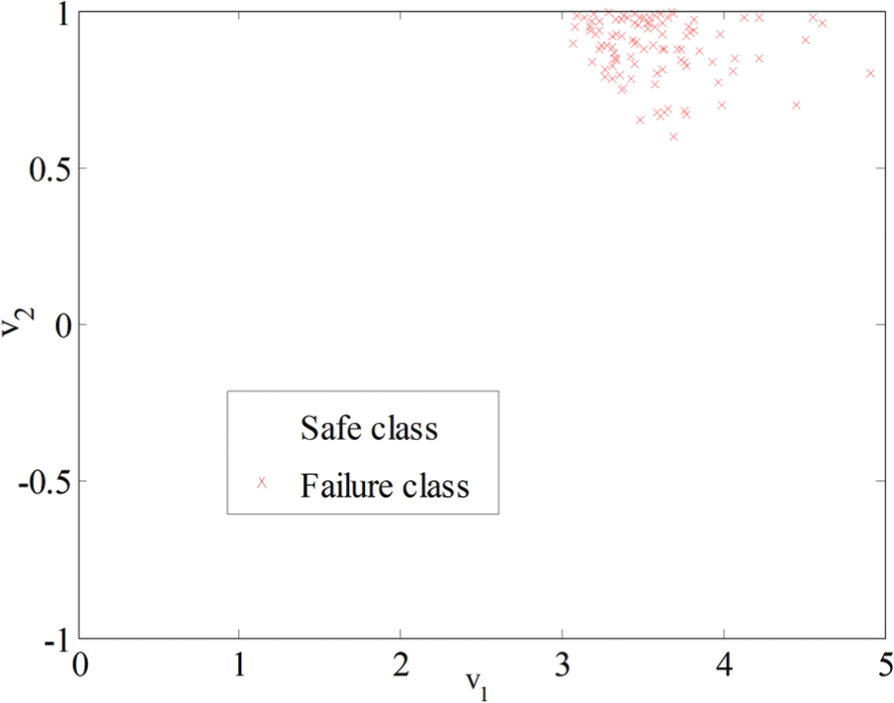
Visualization analysis of single degree-of-freedom impacting reliability problem.
Reliability sensitivity
For vibration systems with uncertain structural parameters, it is important to study the sensitivity of the reliability with respect to the distribution parameters of the uncertainties, such as mean value and standard variance. The reliability sensitivity analysis can help the designer to establish acceptable parameters value, determine the fluctuation of the structural parameters, and select acceptable tolerances.
The failure probability of a vibration system is defined as

where f
X
(

where

where I
f(

where

where
Numerical example
The method is first applied to the single degree-of-freedom impacting system with strong nonlinearity in subsection “Numerical example” of section “Vibration reliability.”Table 2 lists the results of reliability sensitivity calculated by FORM, ISM, and DRM. All the algorithms above will utilize the information provided by the design point result. The results indicate that DRM has the same accuracy as MCM while it deals with a random vibration reliability problem with strong nonlinearity.
Results of reliability sensitivity.

Then, the example in subsection “Numerical example” of section “Vibration reliability” is extended to a multiple degree-of-freedom impacting system with moderate dimensionality as shown in Figure 9. The horizontal acceleration is as follows


System model of multiple degree-of-freedom impacting system with moderate dimensionality.
the gap between the mass m 3 and the case wall is set such that b = 7.2 cm and the nonlinearity of the system is set such that γ = 1. Uncertain parameters for the system are m 1, m 2, m 3, k 1, k 2, k 3, c 1, c 2, and c 3. Each parameter follows a normal distribution and the distribution parameters are listed in Table 3.
Mean value and standard deviation of random variables.

The failure event is defined as that the mass m
3 impacts on the case wall in 10 s. The design point for this problem is that

Straight line that separates the two classes of samples and samples above it.

Visualization analysis of multiple degree-of-freedom impacting reliability problem.
There are 36 samples above the straight line; thus, the reliability R = 1−N up/N = 0.9964. As the reliability sensitivity analysis requires the position of the failure samples, the ability of capturing the failure samples of different algorithms is compared by calculating the failure probability and the results are listed in Table 4. N c is the total number of calls of limit state function to calculate the failure probability, P f is the failure probability, and the result of MCM is used as the standard reference. The result calculated by DRM shows good accuracy and it requires less number of calls of limit state function, which indicates that the DRM has good capacity of capturing the failure samples. The reliability sensitivity is calculated by equation (33) using the position of the failure class samples in the original space corresponding to the samples above the straight line in the 2D plot. The results of reliability sensitivity are as follows

Failure probability of different methods.

As the effects of design parameters on reliability of general system are different, it is important to know the influence of random parameters. Because of the difference of parameter dimension, it is difficult to obtain the comparison results for reliability sensitivity of statistical characteristic, so the results of reliability sensitivity must be non-dimensional-normalized. The standard deviation is used as a normalization factor to make the sensitivity measures dimensionless and more appropriate for variable ranking.27,28 The non-dimensional reliability sensitivity can be expressed as


where S non(µx ) is the non-dimensional reliability sensitivity with respect to the mean value of random parameter; S non(σx ) is the non-dimensional reliability sensitivity with respect to the standard deviation of random parameter. Then, the sensitivity factor S f of each random variable is defined as follows

Figure 12 shows the non-dimensional reliability sensitivity result and the proportion plot of each sensitivity factors. It can be found that the non-dimensional reliability sensitivity for the mean value of k 1, k 2, k 3, c 1, c 2, and c 3 are positive, and for the mean value of m 1, m 2, and m 3 and the variance of m 1, m 2, m 3, k 1, k 2, k 3, c 1, c 2, and c 3 are negative. That is to say the reliability of the vibration system increases as the mean value of k 1, k 2, k 3, c 1, c 2, and c 3 increases, but descends as the mean value of m 1, m 2, and m 3 and the variance of m 1, m 2, m 3, k 1, k 2, k 3, c 1, c 2, and c 3 increases. The sensitivity factors of the structural parameters in the order of degree of influence on reliability are k 1, m 3, k 2, m 2, m 1, k 3, c 1, c 2, and c 3. The polar transformation-based reliability sensitivity analysis method is very efficient to solve reliability and reliability sensitivity problems of vibration systems almost with the same accuracy as the MCM, which in the absence of analytical solutions is the standard reference for accuracy in this field.

Non-dimensional reliability sensitivity and the proportion plot of each sensitivity factors: (a) non-dimensional reliability sensitivity with respect to mean value, (b) non-dimensional reliability sensitivity with respect to standard deviation, and (c) proportion plot of each sensitivity factors.
Conclusion
In this article, the DRM was applied to vibration reliability and reliability sensitivity problems and the applicability of the method was investigated. The study of the Duffing oscillator subjected to white noise shows that in the case the important direction of a reliability problem does not exit, the application is inappropriate. In order to apply the method to more vibration reliability problems, the iHLRF method was modified when calculating the design point. The reliability of a single degree-of-freedom impacting system was calculated, and the influence of structural parameters on the reliability of a multiple degree-of-freedom impacting system was studied. Numerical results were presented.
Footnotes
Academic Editor: Farzad Ebrahimi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by the National Natural Science Foundation of China (Grant No. 51135003), National Science and Technology Major Project of China (Grant No. 2013ZX04011011), and the Fundamental Research Funds for the Central Universities of China (Grant No. N140306004).