
Abstract
For a caged spiral power spring, its moment of inertia varies with the time in energy storage and is closely related to the states of spring strip. Due to continuous changing of the shape in energy storage, calculation of variable moment of inertia for spiral power spring is a highly challenging but important issue. A general analytical model and calculation method of variable moment of inertia for spiral power spring are proposed in this article. First, the contraction process of spiral power spring in energy storage is clearly revealed and analytical model of spiral power spring on the basis of contraction process is presented. In terms of the contraction characteristic, a general calculation method based on divisions of stage and state for variable moment of inertia is put forward. Finally, a spiral power spring is designed, and a prototype of the spring is developed. The proposed model and general calculation method are applied into the prototype to calculate its variable moment of inertia, and they are evaluated by a developed experimental scheme.
Introduction
Due to the advantages of low torque change, relatively large curvature variability, and high security, spiral power spring (SPS) is widely utilized in industry for energy storage, such as an actuator, 1 timekeeping device, 2 energy storage equipment, 3 and driven toys. The manufactured SPS commonly with a thin steel strip of constant rectangular cross section is wrapped up in housing and coiled on the inner shaft to facilitate the utilization.
However, in contrast with other types of springs, SPS is studied relatively less. 2 In addition, published literatures on the spring primarily concentrate on modeling of general ontology4–6 and analyzing torque–turn characteristic curve.6,7 For instance, generalized analytical model considering strip thickness and curvature variability is proposed in Muñoz-Guijosa et al. 4 On the basis of Muñoz-Guijosa et al. 4 and taking into account of variable bending stiffness, a clothoidal strip for the spring is analyzed in Muñoz-Guijosa et al., 5 and a low variability torque–turn curve is obtained.
However, within the extent of our knowledge, moment of inertia for SPS in a certain state has not been paid attention to, let alone variable moment of inertia. Moment of inertia is a significant parameter for a rotating object. Conventional calculation formulae with respect to moment of inertia are mostly specific to rigid body with invariant shapes. Nevertheless, when storing energy, SPS will be continuously wound down on the inner shaft, as shown in Figures 2 and 3 in section “Modeling of contraction process for SPS.” Simultaneously, the shape of the spring will be continuously changing, leading to a continual variation of moment of inertia. Existing calculation formulae of rigid body cannot address the issue of time-varying moment of inertia. Additionally, for the application of SPS as a large-capacity energy storage device, 8 the driving technology is essentially applied to control a motor to rotate the inner shaft in a certain speed and fully wind up the spiral spring. Therefore, acquisition of moment of inertia for the spring is beneficial to realize high precision speed control. In allusion to the variable variation of moment of inertia in energy storage for the spring, a newly method should necessarily be put forward to calculate it.
A general analytical model and calculation method based on the divisions of stage and state for variable moment of inertia of SPS are proposed in this article. The contraction process of the spring in energy storage is clearly revealed. The variability of moment of inertia for the power spring is formulated on the basis of the general analytical model and certain constraint conditions. And the model and calculation method are applied into a developed spring prototype. The structure of the rest of this article is as follows: the contraction process of the spring in energy storage is analyzed, and the analytical model of variable moment of inertia is performed in section “Modeling of contraction process for SPS.” A general calculation method based on divisions of stage and state for variable moment of inertia of the spring is demonstrated in section “Calculation of variable moment of inertia for SPS.” A prototype of SPS is developed, and the presented model and calculation method are verified and applied into the prototype in section “Implementation of the proposed model and calculation method.” Conclusions are given in section “Conclusion.”
Modeling of contraction process for SPS
Analysis of contraction process
Figure 1 shows a SPS uncaged in a free state. For full utilization of the space in housing, when the spring is packed into the housing, portion or all of strip coils will be clamped to the internal wall of housing. After caged in the housing, the whole of SPS will be divided into two parts by the housing, which are in the free state and wound down on the internal wall, as shown in Figure 2. Figure 2 indicates that portion of strip coils is clamped to the internal wall, and the remaining strips are in the free zone surrounded by the housing. Supposing radius of curvature of a point in the center form line of spiral spring is cF , radial radius from this point to origin o is rF , radius of curvature in internal wall of housing is cC , and its radial radius is rW . Apparently, due to the shape of the internal wall is a circle, cC equals to rW . Therefore, it can be known that for the portion of strip coils clamped to the internal wall, those radii of curvature cF are greater than cC ; for the remaining strip coils in the free state, those radii of curvature cF are less than cC ; while for the point B with cF = cC , it is just the boundary point of two states as mentioned above. If the minimum radius of curvature for the spring is larger than cC , the whole of the spring after being caged will completely wound down on the internal wall of housing. 4

Uncaged spiral power spring.

Spiral power spring caged in the housing and without applied torque.
Supposing radius of curvature of the inner shaft is cA and its radial radius is rS . For a circular shaft, cA equals to rS . Similarly, if radius of curvature for a portion of strip coils uncaged in the free configuration is less than cA , those strips will wound down on the inner shaft after caged. However, those strips would not contribute to energy storage, resulting in unnecessary waste of materials. Therefore, such case should be avoided. On the premise of security assurance, the radius of shaft should be lower than the minimal radius of curvature of the spring.
For the caged spiral spring, when an external torque imposed on the spring rotates the inner shaft, the strip coils clamped to the internal wall of the housing will successively go into free space from the boundary point B. Meanwhile, the strip coils in the free space will gradually be wound down on the inner shaft. Finally, if the strength is large enough, all of the strip coils will be wound down on the inner shaft, as shown in Figure 3. Hence, the states of the spring in energy storage process involve three types, which are clamped to the internal wall of housing, free state, and wound down on the inner shaft.

Spiral power spring fully wound down on the inner shaft.
Model
In terms of the above analysis, the general state variation of the spring in energy storage has been drawn in Figure 4. In Figure 4(a)–(d), the general energy storage process can be divided into four stages as follows:
1. Stage I: In this stage, the manufactured free spring is caged in the housing. A portion or the whole of the strip coils is clamped to the internal wall. The remaining strips are in the free configuration. Considering a general case, we suppose that a portion of strip coils is clamped to the internal wall, and the remaining strips are in a free state.
Stage II: In the second stage, the strip coils clamped to the internal wall will gradually release into the free space and go into the free state. But the strip coils clamped to the internal wall have not fully released completely. Simultaneously, if the strength is large enough, the strip coils in the free state will be wound down on the inner shaft. That is to say, three states of clamped to the internal wall, being free, and wound down on the inner shaft are involved in this stage.
Stage III: In this stage, the strip coils clamped to the internal wall have released completely. If the strength is large enough, the strip coils in the free state continue to be wound down on the inner shaft, but they have not fully wounded down. Therefore, two states of being free and wound down on the inner shaft are contained in this stage.
Stage IV: In the final stage, if the strength is enough, the whole of strip coils will be completely wound down on the inner shaft with only one state (wound down on the inner shaft) involved. The last stage manifests the finish of energy storage.
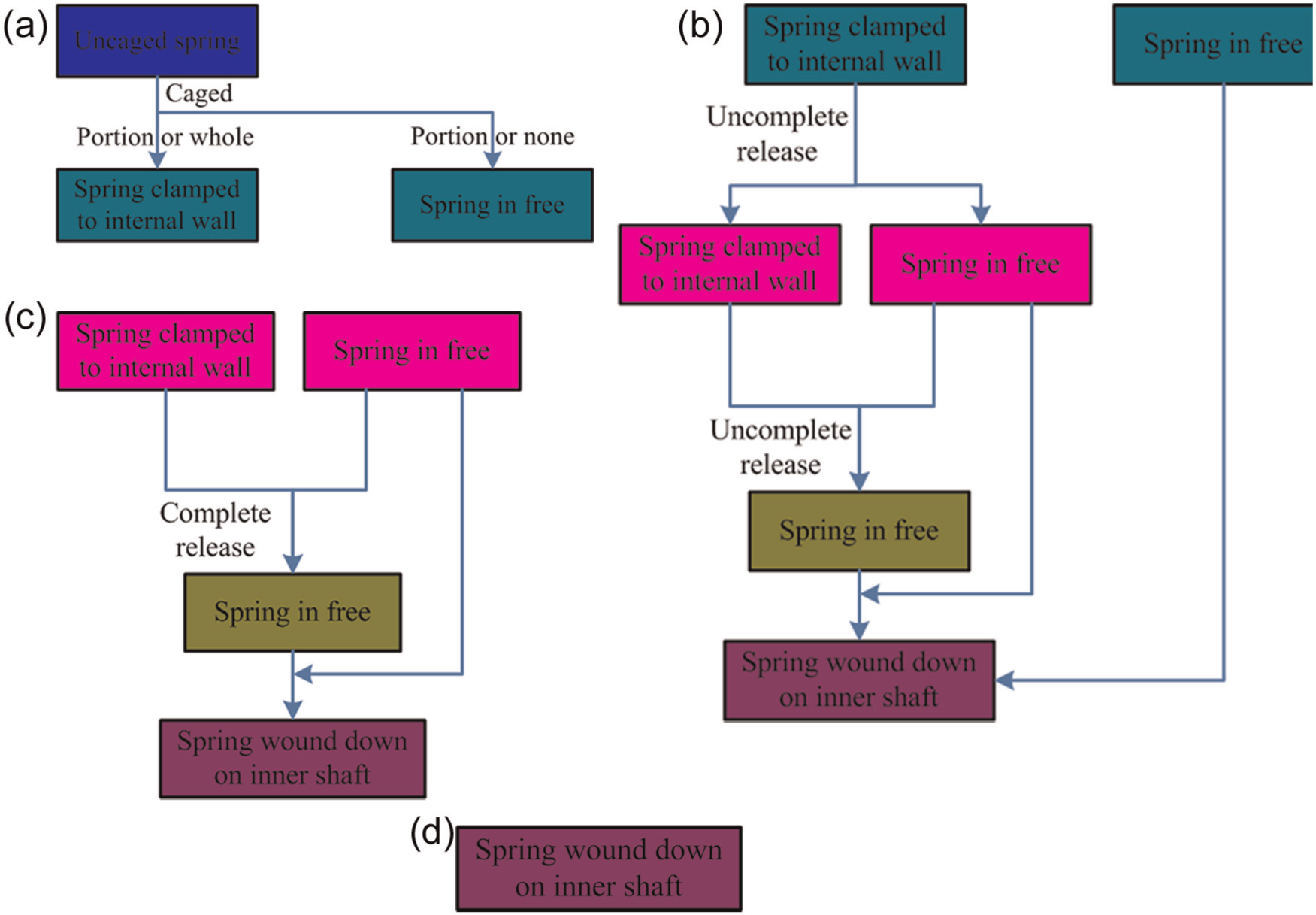
Schematic diagram of state variations for spiral springs in four stages: (a) stage I, (b) stage II, (c) stage III, and (d) stage IV.
Figure 4 gives a general complete description of deformation for SPS in energy storage. In general, with the action of external torque, the manufactured and caged SPS in the free state and clamped to internal wall will be continuously wound down on the inner shaft.
Calculation of variable moment of inertia for SPS
As presented above, variable moment of inertia for caged SPS in energy storage varies with the state change of spring and the amount of strip coils in each state. Hence, it can be concluded that calculation of variable moment of inertia for the spring in energy storage process primarily depends on the states of spring and the amounts of strip coils in different states.
For general consideration, supposing that the spring contracted in energy storage experiences four stages as mentioned above. In this way, the variation of moment of inertia for the spring will also go through four stages. Hence, a general calculation method based on divisions of stage and state for variable moment of inertia for SPS is proposed and described as follows.
2. Stage I: For the spring in stage I, let J 1 be the total moment of inertia and Jw 1, Jf 1, and Jp 1 express moments of inertia clamped to internal wall, being free, and wound down on the inner shaft, respectively. Hence, J 1 can be calculated as follows

Since stage I only involves two states of clamped to internal wall and being free,

For the strip coils in the free state, a tiny element dl along the length corresponding to

where Lf 1 is the length of spring strip in the free state; rf 1 is the radial radius of center form line for spring strip in the free state; rb 1 is the radial radius of center form line at boundary point B between free state and clamped to internal wall; rA is the radial radius of the inner shaft plus half of the spring strip thickness; ρ, b, and h are the density, width, and thickness of spiral spring, respectively; and ff is the function between the differential element and radial distance in the free state.
Similarly, for the strip coils clamped to internal wall, a tiny element dl along the length corresponding to

where Lo is the overall length of the whole spring, Lf 1 is the spring strip length in the free state, rw 1 is the radial radius of center form line for spring strip clamped to internal wall, rC is the radial radius of internal wall minus half of the spring strip thickness, and fw is the function between the differential element and radial distance in clamped to the internal wall.
Hence, the total moment of inertia J 1 can be specifically written as follows

Furthermore, defining drf 1 and drw 1 are the differential elements of rf 1 and rw 1, respectively. If dl can be concretely represented by drf 1 and drw 1, respectively, the specific result of J 1 will be obtained. For different shapes of spiral springs, the concrete formulae of drf 1 and drw 1 are different. Therefore, the specific results of dl expressed by drf 1 and drw 1, respectively, will be distinct. In addition, application of θ indicates angular coordinate in polar coordinate system and θ equals to zero in stage I.
3. Stage II: For the spring in stage II, let J 2 be the total moment of inertia and Jw 2, Jf 2, and Jp 2 express respective moments of inertia of clamped to internal wall, being free, and wound down on the inner shaft. Hence, J 2 can be calculated as follows

where
At the beginning of stage II, strip coils clamped to internal wall will gradually be released into the free state. Hence, for the strip coils clamped to inner wall, a tiny element dl along the length corresponding to

where rw 2 is the radial radius of center form line for strip coils clamped to internal wall in stage II; ΔLw 2 is the length change of spring strip clamped to internal wall from stage I to stage II; and rb 1 and rb 2 are the radial radii of center form line at boundary point B between free state and clamped into internal wall in stage I and stage II, respectively.
With the increase in strip coils being wound down on the inner shaft, the length clamped to the internal wall will gradually transit into the free state, leading to a variation of moment of inertia for strip coils in the free state. It should be noted that the change value of the length

where ΔLf 2 is the length change of spring strip in the free state from stage I to stage II and rf 2 is the radial radius of center form line for spring strip in the free state.
In addition, surplus portion

where rp 2 is the radial radius of center form line for spring strip wound down on the inner shaft in stage II, ΔLp 2 is the length change of spring strip wound down on the inner shaft from stage I to stage II, rj 2 is the radial radius of center form line at boundary point C between free state and wound down on the inner shaft in stage II, and fp is the function between the differential element and radial distance wound down on the inner shaft.
Hence

Furthermore, if we use drp 2, drf 2, and drw 2 to indicate the differential elements of rp 2, rf 2, and rw 2, and dl is reasonably represented by drp 2, drf 2, and drw 2, respectively, the specific calculation formula of J 2 will be obtained. For different shapes of spiral springs, the concrete formulae of drp 2, drf 2, and drw 2 are different. Therefore, the specific results of dl are computed by drf 1 and drw 1 with a different expression, respectively.
Additionally, it should be noted that two constraint conditions should be considered in stage II as follows:
First, regardless of how the lengths of spring strip in different states change, the total length Lo for the spring must remain unchanged during energy storage. In other words, adding the lengths of spring strip in three states Lw 2, Lf 2, and Lp 2 up, we can obtain

Second, the reduced length clamped to internal wall equals to the changes in the free state and wound down on the inner shaft

In essence, equations (11) and (12) restrict the relations among rA
, rj
2, rf
2, rb
1, and rb
2. Substitution of equations (11) and (12) into equation (10), the specific result of J
2 can be obtained. Moreover, the range of variation expressed by θ for stage II is
3. Stage III: For the spring in stage III, let J 3 be the total moment of inertia and Jw 3, Jf 3, and Jp 3 represent moments of inertia of clamped to internal wall, being free, and wound down on the inner shaft, respectively. Hence, J 3 can be calculated as follows

Since

where
At the start of stage III, the strip coils in the free state will gradually transit into the state of wound down on the inner shaft. Similarly, a tiny element dl along the length corresponding to

where ΔLf 3 is the change in reduced length for strip coils in the free state from stage II to stage III and rf 3 is the radial radius of center form line for spring strip in the free state.
The element dl will gradually wound down on the inner shaft, leading to an added length wound down on the shaft and changing moment of inertia for the spring. Hence, the change value of moment of inertia

where rp 3 is the radial radius of center form line for spring strip wound down on the inner shaft in stage III, ΔLp 3 is the length change of spring strip wound down on the inner shaft from stage II to stage III, and rb 3 is the radial radius of center form line at boundary point B between free state and clamped to internal wall in stage III.
Hence, J 3 can be rewritten as follows
Moreover, if we utilize drp 3 and drf 3 to describe the differential elements of rp 3 and rf 3, and dl is reasonably expressed by drp 3 and drf 3, respectively, the specific calculation formula of J 3 will be obtained. For different shapes of spiral springs, as the concrete formulae of drp 3 and drf 3 are different, the specific results of dl computed by drp 3 and drf 3 will be a different expression, respectively.
Furthermore, two constraint conditions should be considered in stage III as follows:
First, similarly with stage II, the total length Lo of the spring in stage III remains the same during energy storage process. Therefore, adding the lengths Lf 3 and Lp 3 of strip coils in the free state and wound down on the inner shaft up, we can obtain

Second, the length of reduced value in the free configuration equals to the added change strip coils wound down on the inner shaft, which can be described as follows

Actually, equations (18) and (19) indicate the relation between rb
3 and rj
3. If equations (18) and (19) are substituted into equation (17), the concrete result of J
3 can be obtained. In addition, supposing the maximum angle is
4. Stage IV: For the spring in stage IV, let J 4 be the total moment of inertia and Jw 4, Jf 4, and Jp 4 indicate moments of inertia of clamped to internal wall, being free, and wound down on the inner shaft, respectively. Hence, J 4 can be calculated as follows

Since

For the strip coils wound down on the inner shaft, a tiny element dl along the length corresponding to

where Lp 4 is the length of spring strip wound down on the inner shaft, rj 4 is the radial radius of center form line at boundary point C between the free state and wound down on the inner shaft, and rp 4 is the radial radius of center form line for spring strip wound down on the inner shaft.
Similarly, for the strip coils in the free state, a tiny element dl along the length corresponding to

where rf 4 is the radial radius of spring strip in the free state.
Hence, the total moment of inertia J 4 can be further written as follows

In addition, drp
4 and drf
4 are defined as the differential elements of rp
4 and rf
4, respectively. If dl can be concretely represented by drp
4 and drf
4, respectively, the specific result of J
4 can be obtained. For different shapes of spiral springs, owing to the concrete formulae of drp
4 and drf
4 differ from each other, the specific results of dl expressed by drp
4 and drf
4, respectively, will have some differences. For stage IV, θ is selected as
In essence, moments of inertia J 1 and J 4 in stage I and stage IV are the exact values at the beginning and finishing moments in stage II and stage III, respectively. For more clarity and integrity, they are presented independently to show the complete contraction process of energy storage for the spring.
On the basis of general contraction process of SPS proposed above, considering the corresponding constraint conditions and integration of computational results in equations (5), (10), (17), and (24), the variable moment of inertia in the whole energy storage process for SPS can be obtained. However, a concern remaining to be dealt with is that how to explicitly distinguish these four stages. Actually, for different SPSs or different shapes of these springs, these will experience different stages in energy storage. Therefore, a unified variable should be selected to represent these contraction processes. The most appropriate variable is angular coordinate of polar coordinate system θ. In terms of the above description, these four stages distinguished by θ can be depicted as follows: ranges of variation expressed by θ for stages I, II, III, and IV are 0,
Moreover, for utilization of the spring in charge or discharge process, its variation of moment of inertia will inevitably influence the whole system’s dynamic behavior. Take, for example, a discussion of energy storage process that the spring is tightened through a driving motor from clamped to housing to wound down on the inner shaft. For this dynamic system, its dynamic behavior depends on a comprehensive moment of inertia, which can be concretely expressed by spring system’s moment of inertia (including spring ontology, internal housing) adding up motor’s moment of inertia. For a static housing, spring system’s moment of inertia will rely on spring’s contraction process. As analyzed in the above sections, the spring tightened in energy storage will experience four stages; thus, in every stage, the spring is consisted of two or three states. It should be noted that not all states of spring coils will affect the spring’s moment of inertia. For instance, as the strip coils clamped to the internal housing are static, they will not influence the dynamic behavior. In other words, the effective moment of inertia primarily lies on the rotating parts. For the spring, the rotating parts include spring coils of the free state and wound down on the inner axis. However, it is not feasible to calculate the effective moment of inertia separately. Calculation of effective moment of inertia for the spring coils is closely related with the whole contraction process of spring. Hence, the whole analysis of contraction process and calculation of the whole moment of inertia will reveal moment of inertia for the static spring coils of clamped to housing more clearly. In addition, in some situations with rotating housing as proposed in Mi et al., 3 the comprehensive moment of inertia will depend on the whole spring coils because all of the spring coils will rotate with power shaft when storing energy. In general, calculation of moment of inertia for the whole spring will be a basis to analyze the system’s dynamic behavior and be beneficial to reveal the spring’s motion process more clearly.
Implementation of the proposed model and calculation method
Prototype
For implementation of the proposed model and calculation method, a SPS is designed and shown in Figure 5(a) without sealed and Figure 5(b) with sealed. A prototype of SPS caged in housing is developed and shown in Figure 5(c).

Schematic diagram of the developed spiral power spring: (a) designed spiral power spring without sealed, (b) designed spiral power spring with sealed, and (c) manufactured prototype of spiral power spring caged in housing.
The designed SPS is used for electric energy storage. In the energy storage process, SPS will be gradually wound up from external housing to central spindle as shown in Figure 3, which enlarges the torque and reduces the inertia of SPS. When SPS releases the energy, the process is just opposite. In addition, the continuous changing inertia of SPS extremely difficult to be measured and acquired is also a big problem for utilization. Hence, the proposed method in this article is quite practical and meaningful. The parameters of the prototype are shown in Table 1.
Parameters of the prototype.

In addition to above parameters, calculation of variable moment of inertia proposed in this article should know the shapes of spiral spring in various states, which are depicted in Figures 1–3 and explained in detail in the following.
First, the center form line of the spring in the free state is indicated by exponential functions, which are

where Z, Y, and Dm satisfy the following equations



where K and n indicate the relationship between true stress and true strain for the spring material, stress = K(strain) n . According to the spring material used, K and n are chosen as 410 MPa and 0.1, respectively. In terms of equations (25)–(28), m is determined as 0.03.
Second, the center form line of the spring clamped to internal wall and wound down on the inner shaft is Archimedean spiral, which are
Calculation of variable moment of inertia for the prototype
In terms of the above conditions, calculation of variable moment of inertia for the prototype is given as follows (Appendix 2):
1. Variable moment of inertia in stage I: In terms of equation (5), variable moment of inertia

where

2. Variable moment of inertia in stage II: According to equation (10), variable moment of inertia

where
Considering constraint condition of equation (11), we can obtain

Considering constraint condition of equation (12), we can obtain

3. Variable moment of inertia in stage III: In accordance with equation (17), variable moment of inertia
where

According to constraint conditions of equations (18) and (19), the relation between rb 3 and rj 3 can be found as follows

4. Variable moment of inertia in stage IV: In terms of equation (24), variable moment of inertia

where
Ultimately, considering the integration of the results in equations (29), (31), (34), and (37), variable moment of inertia of the spring prototype can be obtained and drawn in Figure 6.

The calculated variable moment of inertia for the spring prototype.
Experimental verification
For verification of the proposed model and calculation method, an experimental scheme including SPS, permanent magnet synchronous motor (PMSM), torque and speed sensor, converters, and controller is developed and shown schematically in Figure 7. When storing energy in SPS, PMSM is driven by electric power, and it rotates the central spindle and winds SPS up. Hence, the electric power energy is stored in the form of potential energy of SPS equipped in energy storage box. For recording the torque variation of spring, a torque sensor is installed between PMSM and spiral power system, and a speed sensor is equipped on the axis.

Developed experimental system to verify the proposed algorithm.
It is supposed that moment of inertia for PMSM is Jm , and friction and viscous damping are neglected. Furthermore, the spring is assumed to be infinitely rigid, and we are considering only its inertial property. Hence, the equation of motion for the rotor of motor can be written as follows

where Tm and Ts are the electromechanical torque of motor and torque of spring, respectively; ω is the angular speed of rotor; t is the time; and Je is a comprehensive moment of inertia. It should be noted that Je includes two parts: the first part is the PMSM’s moment of inertia Jm and another part is the spring’s moment of inertia J equivalent to motor side. Due to the direct drive connection between PMSM and the spring, Je is equal to J + Jm . Additionally, if the spring is boxed in the housing, the second part of moment of inertia consists of the whole spring and the housing.
Discretization of equation (38), we can obtain

where k is the sampling point and τ is the sampling step and is set as 0.001 s.
In order to ensure the spring to experience the complete process, a large enough torque Tm should be exerted to the spring. Meanwhile, the external torque cannot be too large; otherwise, it can damage the spring. Through the test, the maximum torque of the spring is about 50 N m. Hence, we choose the torque Tm to be 50 N m. Through adjustment of controller, PMSM operates at an accelerating state with the constant external torque Ts of 50 N m. For equation (39), because the spring torque Ts is always lower than Tm , the spindle of spring will accelerate to rotate. The rotating speed ω and the torque of spring Ts are recorded by speed and torque sensors, respectively.
As a result, we can directly obtain the comprehensive moment of inertia Je in terms of equation (39). And the comprehensive moment of inertia Je minus PMSM’s moment of inertia Jm and housing’s moment of inertia is just the spring’s variable moment of inertia. Finally, the experimental result of spring’s variable moment of inertia is shown in Figure 8. Figure 8(a)–(d) indicates the variable moment of inertia, operating speed, torque, and theta for the spring prototype, respectively.
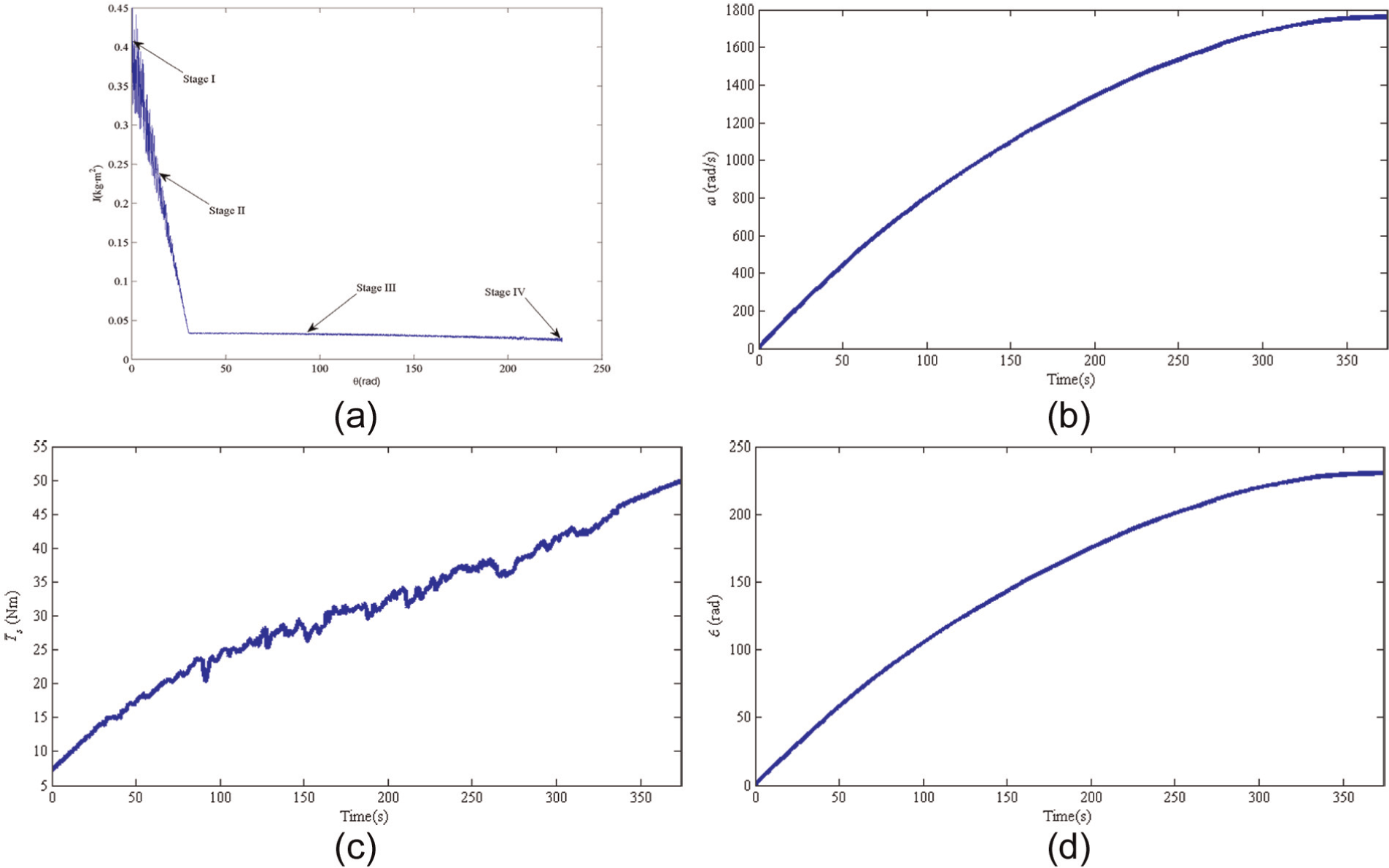
Experimental result of (a) variable moment of inertia, (b) speed, (c) torque, and (d) theta for the spring prototype.
In contrast to the theoretical calculation result in Figure 6, the experimental test result of variable moment of inertia shown in Figure 8(a) is basically consistent with the variation tendency of moment of inertia for the developed prototype. And the four stages can be clearly observed. Merely, the fluctuation of moment of inertia in experimental verification is a little larger than theoretical calculation, especially for the initial period, the reason is that the speed of the motor needs to take a little time to settle down. In general, the effectiveness and correctness of the proposed model and calculation method are evaluated by the experiment.
Conclusion
On the basis of research results achieved in this article, the conclusions can be given as follows:
A general analytical model of SPS in energy storage is proposed. The physical contraction process of SPS in energy storage can be divided into four stages and involves three states, which are clamped to the internal wall of housing, being free, and wound down on the inner shaft.
Considering the corresponding constraint conditions, a general calculation method based on the divisions of stage and state for variable moment of inertia of SPS is presented in terms of the general analytical model. Considering the integration of calculation results for these four stages, the variable moment of inertia in the whole energy storage process for the spring can be solved.
A prototype of SPS is developed, and the developed model and calculation method are implemented by the prototype. In addition, the proposed model and calculation method are verified by an experimental scheme.
Footnotes
Appendix 1
Appendix 2
This appendix is mainly on the basis of Queener and Wood 6 and indicates how to calculate rb 1 and rfs in section “Calculation of variable moment of inertia for the prototype”:
In terms of equation (40), defining radius of curvature of any point P is
The length from the point connecting inner shaft and the spring to point P can be calculated as follows
Substituting equations (42) and (43) into equation (41), equation (41) can be rewritten as
In terms of equation (45), the curvature of any point Q,
For the commonly thin spring strip,
Due to
For equation (42), if
Substituting equation (50) into equation (49),
In terms of equations (43) and (51), equation (47) can be rewritten as
Let
Because of
Substituting equations (50) and (53) into equation (54) and arranging the results,
Due to
Substituting equations (43) and (56) into equation (55),
For the point of
In terms of equations (43) and (59),
The spring length LD between the point D in Figure 3 and the innermost end of the inner shaft can be calculated as
Additionally, let LDW represent the line length from point D to the point clamped to internal wall, the lengths of LDW , rfs , and rC form the three sides of a right triangle
For the total length of the spring Lo
Substituting equations (43), (56), (62), and (63), into equation (61),
Academic Editor: Michal Kuciej
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This work was supported by the National Natural Science Foundation of China (grant no. 51407077), the Specialized Research Fund for the Doctoral Program of Higher Education of China (grant no. 20120036130001), and the Fundamental Research Funds for the Central Universities of China (grant no. 2014MS93).