
Abstract
Profile shift has an immense effect on the sliding, load capacity, and stability of involute cylindrical gears. Available standards such as ISO/DIS 6336 and BS 436 DIN/3990 currently give the recommendation for the selection of profile shift coefficients. It is, however, very approximate and usually given in the form of implicit graphs or charts. In this article, the optimal selection values of profile shift coefficients for cylindrical involute spur and helical gears are described, using a differential evolution algorithm. The optimization procedure is developed specifically for exact balancing specific sliding coefficients at extremes of contact path and account for gear design constraints. The obtained results are compared with those of standards and research of other authors. They demonstrate the effectiveness and robustness of the applied method. A substantial improvement in balancing specific sliding coefficients is found in this work.
Introduction
Gear is an important component used as a part of mechanical systems to transmit motion and power between rotating shafts by means of progressive engagement of projections called teeth. In recent years, the increasing demand for high-strength, efficient, quiet, and high-precision gear design leads to various methods for improvements. One of the major methods available to the current time is tool shift, which enables to achieve non-standard distances between shafts, to improve the loading capacity, and to avoid undercutting in the gears with small numbers of teeth. Additionally, the profile shift has an immense effect on the main operating parameters of gear pairs (working life, efficiency, vibrations, power losses, noise, and wear); it can be used in order to optimize the design, according to the special requirements of each problem.1–3
In recent decades, a variety of methods have been made for determining the profile shift coefficient values in order to satisfy various optimization criteria. In fact, Henriot 4 had proposed a graphical system required for balanced specific sliding in both gears, which reduces wear and heavy scoring risks at the extremes of contact path. This system was reserved only for gears with 20° pressure angle. The DIN 3992:1964 standard, 5 based on an earlier Niemann and Winter 6 work, provides a diagram for the total shift (x 1 + x 2) and some other ones for sharing it between the pinion (x 1) and the wheel (x 2), which give teeth with balanced sliding velocity and stress at the root.
Furthermore, PD 6457:1970 7 standard recommends using computation formulae for the profile shift coefficients. Three cases were considered in this method, general applications, equalizing bending stresses, and balancing specific sliding. For the same manner, ISO/TR 4467:1982 standard 8 provides a practical guide for gears with great contact ratio, minimum shocks, and general applications. DIN 3994 9 and 3995 10 standards recommend (x 1 = x 2 = 0.5) aiming to increase the load capacity. AGMA 913-A 98:1998, 11 cited by Miriča and Dobre, 12 recommends the choice of the criterion considered of greatest importance for practice. It is the reason why the problem of the distribution of the shift coefficient sum on each gear wheel could be met in the case of the largest used thermal treatment for cylindrical gears of general use: case hardening. Maag 13 recommendation, cited by Baglioni et al., 14 suggests that apportionment of the profile shift coefficients is adequate for a satisfactory compromise between the tooth root thickness and maximum gear efficiency. Therefore, the values of profile shift coefficients read from a graph or using approximate formulas are not accurate and interpolations increase the error. So, the obtained results are not very reliable.
To overcome the limitations in the above methods, Pedrero and Artés 1 had developed the approximate equations of the profile shift coefficients in order to equalize specific sliding and pre-established value of the contact ratio. A tooth-geometry optimization feature, using an adaptive-grid-refinement (AGr) algorithm procedure, had been proposed by Samo et al. 15 The optimization purposes are to compromise between specific sliding and Hertz pressure. To estimate the optimal values of profile shift coefficients as well as radius of the tooth root and the pressure angle, an optimization method called explicit parametric method (EPM) was developed by Atanasovska et al. 16 The finite element analysis (FEA) was used in this method for all necessary stress–strain calculations. Bruyère and Velex 2 had proposed a simplified multi-objective analysis of optimum profile modifications in spur and helical gears with regard to transmission error fluctuations.
Most design optimization problems in engineering are highly non-linear, which include many different design variables and complicated constraints on stresses, displacements, load carrying capability, and geometrical configuration so that classical methods are no more effective. However, evolutionary algorithms (EAs) can efficiently deal with this kind of problems quickly and with higher precision. An emergent algorithm, from this family, increasingly used is the differential evolution (DE) algorithm. It is characterized by its ease of implementation as well as by its fast convergence and robustness. 17
In this article, the DE algorithm is used to find the optimal profile shift coefficients for external involute spur and helical gears. First, the mathematical model is established based on the principles of equalized specific sliding at extremes of contact path in order to maximize the service life of the gear pair. Normal and bending stresses are constrained to remain within the prescribed values, and other design criteria such as gear-tooth thickness, contact ratio, and tooth interferences are also considered. The DE developed for the optimization procedure is implemented in MATLAB. A substantial improvement in balancing specific sliding coefficients is found in this work.
The remainder of this article is organized as follows. The optimization methodology is presented in section “Optimization methodology.” The DE algorithm scheme is detailed in section “DE algorithm.” In section “Experimental study,” the results obtained in this study are compared with those of standards and research of other authors. Finally, the last section is dedicated to the conclusion.
Optimization methodology
In general, any engineering design optimization problem can be expressed as


where
Design variables
The design variables to be optimized in this case are profile shift coefficients x
1 and x
2,
18
where
Objective function
The specific sliding is the main geometrical parameter that affects scuffing and the teeth gear wear. It is defined as the ratio between the sliding velocity vg and the rolling velocity of the mating tooth flanks vr . 6 Specific sliding coefficients γ 1 and γ 2 of the mating pinion and wheel are then calculated using the following formulas


where vr 1 and vr 2 are the rolling velocities between the mating teeth flanks of the pinion and wheel.
In fact, the specific sliding is considered as a function of the position of the point of contact P as shown in Figure 1. At the pitch point C, vr 1 = vr 2 so γ 1 = γ 2 = 0. But γ 1 becomes infinitely large in end point N 1 (vr 1 = 0) and γ 2 becomes infinitely large in end point N 2 (vr 2 = 0). When vr 1 and vr 2 are equal to zero, γ 1 and γ 2 are equal to −1, respectively, at N 1 and N 2.
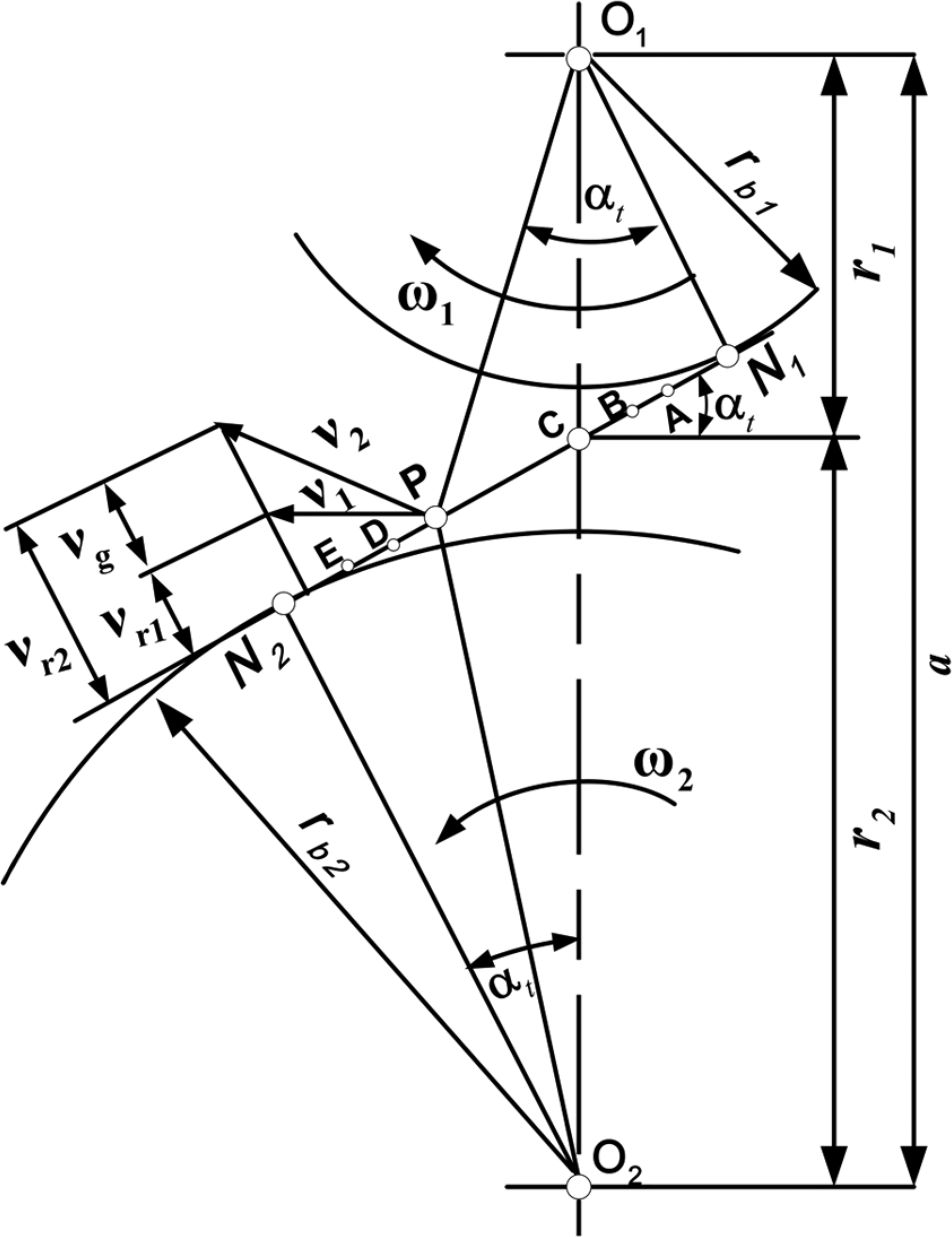
Sliding as a function of contact point (P).
In order to maximize the service life and wear resistance of the gear pair, the maximum specific sliding coefficients must be equal at extremes of contact path (the points A and E in Figure 1). So, the objective function can be expressed as

The maximal specific pinion sliding coefficient γ 1max is given by

The maximal specific wheel sliding coefficient γ 2max is given by

where u is the transmission ratio,
According to Henriot, 4 balancing specific sliding coefficients leads also to balancing Almen factor, where the latter represents a product of the Hertz pressure and the sliding velocity (σ H · vg ).
Constraint functions
In most optimization problems, constraints may be imposed by the characteristics of the problem. These constraints have to be satisfied in order to achieve an acceptable solution. In this case, the objective function is subject to the following function constraints:
For obtaining a stable and silent transmission, the minimal transverse contact ratio value εα must be greater than unity. 4 However, in practice to reduce vibration, contact ratio must be greater than 1.3 for spur gear and 1.1 for helical gear 19

To avoid narrow top lands of teeth, 20 the thickness of the tooth tip diameter should be greater than or equal to 0.4 mt .
For pinion

For wheel

where mt is the transverse module and Sat 1 and Sat 2 are the transversal arc thickness of the tooth at the tip diameter for the pinion and the wheel, respectively.
To avoid operating interference on the two mating gears, Figure 1, the distances O 2 N 1 and O 1 N 2 should be, respectively, greater than the tip diameters of the mating gears.
Pinion interference

Wheel interference

where a′ is the working center distance and rb 1 and rb 2 are, respectively, base radii of pinion and wheel.
To avoid undercutting in the mating gears, the following relations must be checked


where z′ is the limit for the number of teeth to avoid undercut and

Maximum calculated normal and bending stresses should be less than the permissible values for the particular material. The stresses were calculated in this study according to “Method B” of the ISO standard 6336-3:2006 21


In order to have a meshing without clearance, the sum of profile shift coefficients must satisfy the following equation

DE algorithm
Basic DE procedure
The DE, proposed by Storn and Price, 17 is a very popular EA and exhibits remarkable performance in a wide variety of problems from diverse fields. Like other EAs, DE is a population-based stochastic search technique. Their operation comprises the following steps (Figure 2).

Flow chart for the procedure optimization by differential evolution.
Initialization
Usually, the population NP is initialized by randomly generated individuals within the boundary constraints

where
Mutation
For each target vector, or parent vector

where
Crossover
The trial vector

where
Selection
The selection operator is chosen to select the better one from the target vector

Treatment of constraints
Boundary constraint
If the

Constraints functions
The constrained optimization problem is transformed in an unconstrained optimization problem using the penalty function approach

where φ is the expanded objective function to be optimized, gi are inequality constraints and λi are the penalty factors.
Experimental study
In order to study the performance of the proposed method, the optimal results obtained by DE were compared with those of Samo Ulaga et al. 15 using AGr algorithm and PD 6457:1970 7 standard. Furthermore, the adaptive grid refinement (AGR) algorithm is, in essence, a generalized-descent method. These methods are classified as heuristic deterministic methods and PD 6457 standard using computation formulae, as shown in equation (25)

where
The control parameters of the DE considered in this study are as follows: population size NP = 50, generations = 50, and F and CR are randomly generated within [0.9, 1.0] and [0.95, 1.0], respectively.
Comparison results between DE and AGr
The allocation of the profile shift coefficients is performed for a gear pair analyzed previously by Samo Ulaga et al. 15 using AGr. The main characteristics of the analyzed involute spur gear pair are number of teeth z 1 = 16 and z 2 = 24, face width b = 14 mm, module mn = 4.5 mm, and pressure angle αn = 20°.
The objective function evaluation, using DE, over 50 generations is shown in Figure 3. The feasible solution found by DE is f(x 1, x 2) = 0 for x 1 = 0.3035 and x 2 = 0.0497. The comparison of results, presented in Table 1, shows that the profile shift coefficient values obtained by DE lead to a perfect balancing of the specific sliding coefficients (γ 1max = γ 2max = 2.5311). Whereas using AGr, the specific sliding coefficients are not (γ 1max = 2.5449 and γ 2max = 2.5072), which may not make a regulated resistance to wear. It can be seen that the DE is more efficient than the AGr algorithm.

Convergence of differential evolution algorithm to the best fitness with respect to the generations.
Optimization results.

Comparison results between DE and PD 6457 standard
The results obtained by DE algorithm, in order to optimize the profile shift coefficients for two external cylindrical gears, one is spur and the other is helical, are compared with those provided by PD 6457:1970 7 using a computation formulae. The characteristics of the gears and comparison results between both methods are shown, respectively, in Tables 2 and 3.
Gear characteristics.

Comparison results between DE and PD 6457:1970. 7

As the result is illustrated in Table 3, the profile shift coefficients obtained by our method (DE) make sure that the two gears have the same specific sliding coefficients for both examples (γ 1max = γ 2max = 2.3132 for the spur gear and γ 1max = γ 2max = 2.4789 for the helical gear), which results in a balanced resistance to wear. But using PD 6457:1970 7 computation formulae, the specific sliding coefficients are not actually equal. Hence, it can be said that DE gives an excellent results.
Distribution of the profile shift coefficients by DE
Figures 4–9 give an intuitive idea about the accuracy of the proposed method. Pinion profile coefficient have been represented as a function of the velocity ratio that equalizing specific sliding coefficients in both gears and these for several values of pinion tooth number, so they can be easily used as charts for gear manufacturers and designers. The following data ranges are considered:
Numbers of pinion teeth

Gear ratios

Sums of profile shift coefficients

Pressure angle

Helical angle values

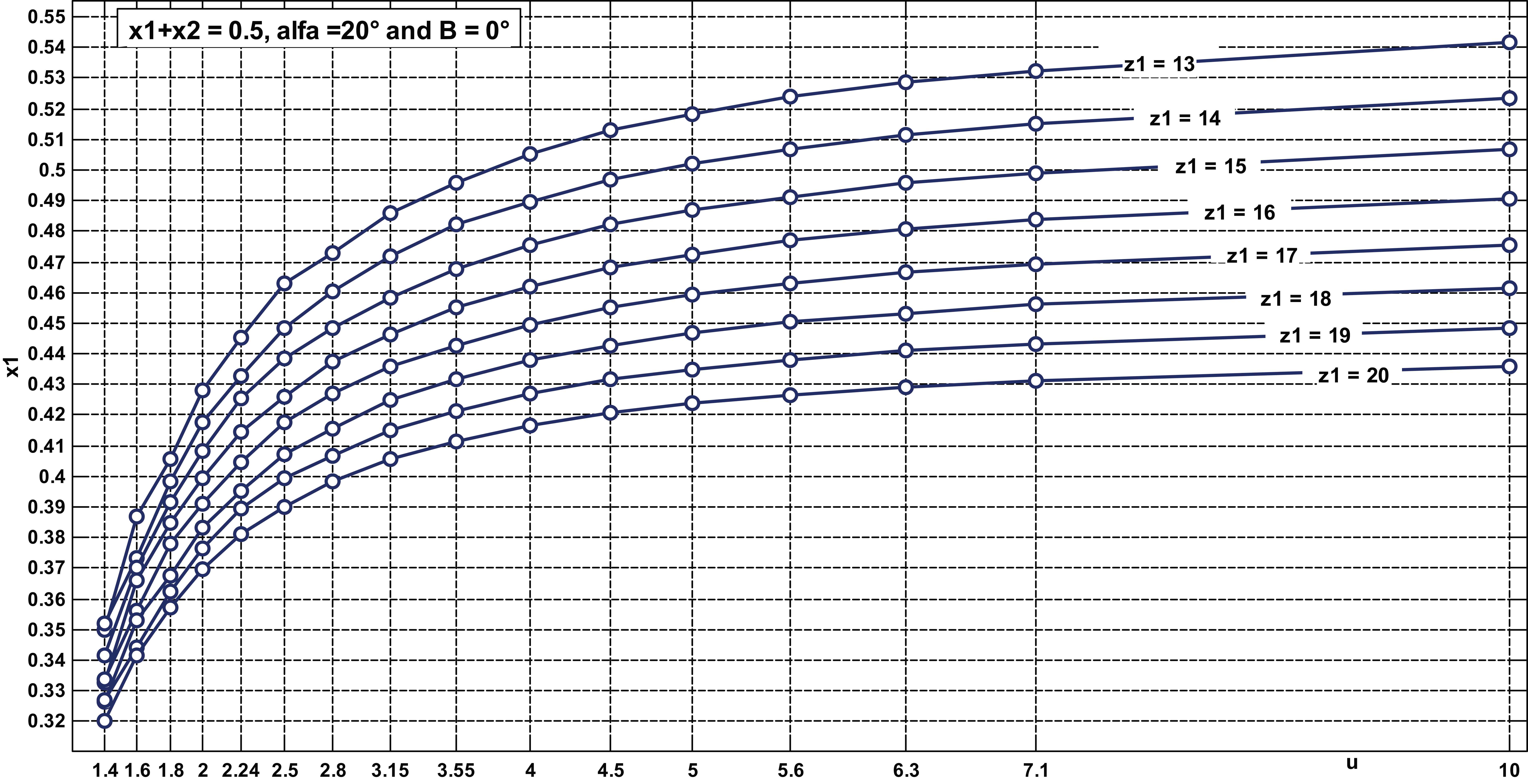
Profile coefficient x 1 for ∑x = 0.5, α = 20°, and β = 0°.

Profile coefficient x 1 for ∑x = 0.8, α = 20°, and β = 0°.
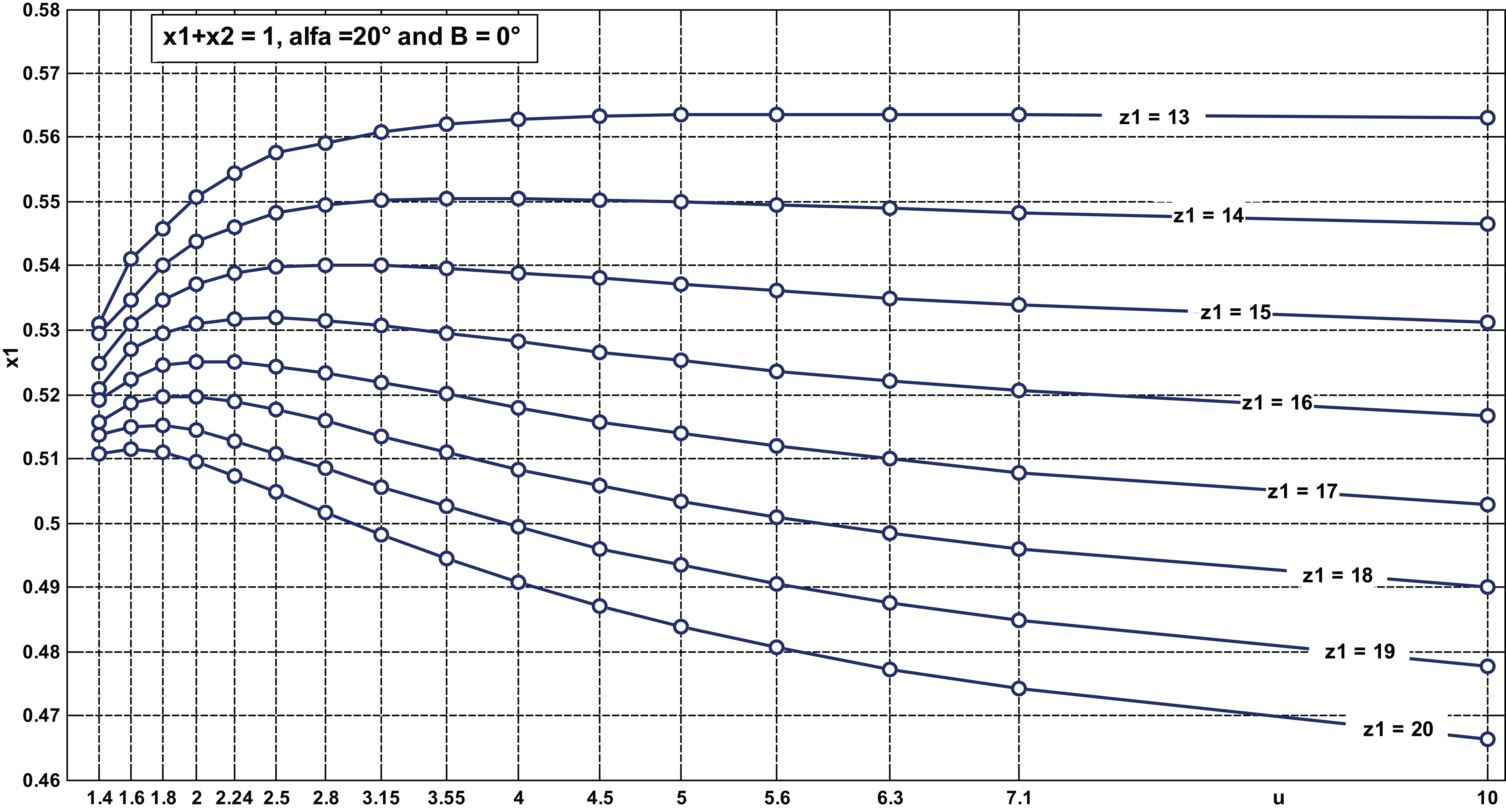
Profile coefficient x 1 for ∑x = 1, α = 20°, and β = 0°.

Profile coefficient x 1 for ∑x = 0.5, α = 20°, and β = 16°.

Profile coefficient x 1 for ∑x = 0.8, α = 20°, and β = 16°.

Profile coefficient x 1 for ∑x = 1, α = 20°, and β = 16°.
Conclusion
The optimal selection values of profile shift coefficients have a significant influence on the operation performances of involute cylindrical gears. The extensive analysis of available procedures and methods for selection of optimal profile shift coefficients leads to the necessity for a unique accurate optimization algorithm which uses up-to-date methods and computation possibilities. In accordance with this conclusion, the exact relations for the determination of optimal profile shift coefficients are derived and presented in this article.
A constrained optimization procedure by an EA, DE, has been developed with respect to balancing specific sliding coefficients of involute cylindrical spur and helical gears. A mathematical model of variables was established for all cases of teeth correction. The objective function is defined with purpose to balance specific sliding for the pinion and the wheel at extremes of contact path. The constraints are formulated and explained in detail. Then, the problem to be optimized in this work has been defined as optimization model with two continuous variables and seven inequality constraints. In order to solve this problem, a DE was developed and programmed in MATLAB.
Simulation results based on the analyzed gear examples as well as comparisons with other methods demonstrate the effectiveness, efficiency, and robustness of the proposed method. The results obtained by DE lead to a perfect balancing of the specific sliding coefficients. The verified optimization algorithm gives a base for developing the multi-objective optimization algorithm by including all other aspects for solving the optimal profile shift of cylindrical involute gears.
Footnotes
Appendix 1
Academic Editor: Fakher Chaari
Declaration of conflicting interests
The authors declare that there is no conflict of interest.
Funding
Parts of this research were supported by Algerian Ministry of Higher Education and Scientific Research (MESRS) CNEPRU Research Project No. J0301220110033 and the Ministry of Sciences and Technology of Republic of Serbia Grant OI 174001 and Grant TR 35029.