
Abstract
This article presents a hybrid position–force control method based on adaptive neural network for addressing the problems of position and force tracking of a constrained reconfigurable manipulator. The reduced-order dynamic model of a reconfigurable manipulator is formulated considering the model uncertainty and the external constraint. Combining decentralized control with centralized control scheme, a hybrid position–force controller is designed for controlling the position and force of the constrained reconfigurable manipulator. The dynamic model uncertainty and the dynamic coupling effect are compensated by radial basis function neural network. The stability of the closed-loop system is proved using the Lyapunov theory. Finally, simulations are performed to study the effectiveness of the proposed method.
Keywords
Introduction
Reconfigurable manipulator consists of robot modules which incorporate power electronics, computing systems, sensors, and actuators. These modules can be serially connected with standard electromechanical interfaces and assembled to desirable configuration for satisfying the requirements of various tasks under different external environments and constraints. 1 Compared with the conventional manipulators with fixed configuration, the reconfigurable manipulator can be adapted to diverse task requirements and take advantage of low cost, easy maintenance, convenient modification, portability, and durability against system malfunctions.2–4 Besides, a reconfigurable manipulator needs an appropriate control algorithm to provide accuracy and stability after reconfiguration, for example, adaptive control, fuzzy control, and neural network (NN) control.5–7
Numerous studies have been carried out on analytical research of the unconstrained reconfigurable manipulator systems. Liu et al. 8 presented a modular distributed control technique for modular and reconfigurable robots based on joint torque sensing, model uncertainties associated with link and payload masses are compensated using joint torque sensor measurement. The remaining model uncertainties, including uncompensated dynamic coupling and joint friction, are compensated by a decomposition-based robust controller. Yu et al. 9 proposed an adaptive NN switching strategy for the trajectory tracking problem of robotic manipulators; the proposed system comprises an adaptive switching neural controller and the associated robust compensation control law. Lin et al. 10 presented a fuzzy variable structure control method for a reconfigurable manipulator; the dynamic model of the manipulator is divided into determined part and uncertain part and then the general feedback control and the centralized compensation control method are implemented, respectively, based on fuzzy variable structure scheme. Clearly, effective position control for the unconstrained reconfigurable manipulators can be obtained under the proposed control methods above. However, in many engineering applications, for example, installing and replacing the battery plate in space station; 11 searching, rescuing, 12 and rehabilitating 13 tasks under the unknown environment; and the hybrid multiple working mode control for the door-opening operation, 14 the contact of a reconfigurable manipulator end-effector with outside environment is inevitable.15,16 Therefore, it is necessary to address the problems of the hybrid position–force control for a constrained reconfigurable manipulator.17,18 For constrained reconfigurable manipulator system, Ahmad et al. 19 presented a hybrid control scheme for the door-opening operation of a constrained reconfigurable manipulator based on a hybrid multiple working mode control scheme. For controlling the position and power circuits of a walking robot module, Vladareanu and Ion 20 presented a hybrid position–force control method using multilevel fuzzy control loop. Singh and Sukavanam 21 proposed a robust adaptive NN-based hybrid position–force control method for a constrained manipulator. However, these methods are concentrated on the single centralized control. Indeed, due to high computation costs, robustness, and complexities, a single centralized controller designed on the basis of an entire system may hardly be applicable for controlling a reconfigurable manipulator.
In recent years, a number of researchers have paid much attention on decentralized control method for manipulators.22,23 The decentralized control systems often arise from various complex situations where there exist physical limitations on information exchange among several subsystems for which there is insufficient capability to have a single centralized controller. 24 Labibi et al. 25 presented a decentralized robust control scheme for controlling an affine nonlinear interconnected system using linear matrix inequalities (LMIs). For decoupled joint controller, each joint is considered as a single-input single-output (SISO) subsystem. Tang et al. 26 presented a general form of decentralized sliding mode robust control law for any mechanical system described by Euler–Lagrange equation and involving high-order interconnections. Li et al. 27 presented a decentralized robust control algorithm for modular and reconfigurable robots based on Lyapunov’s stability analysis and backstepping techniques. Dong and Li 28 presented a decentralized integral nested sliding mode control for time-varying constrained modular and reconfigurable robot. Obviously, the decentralized control scheme can provide the flexibility of the configurations for a reconfigurable manipulator. However, it is difficult to obtain the constrained force measurement of the joint module directly which is necessary to design the decentralized position–force controller of the reconfigurable manipulator, although the end-effector constrained force measurement, which is obtained by the torque sensor of the end-effector, can be used to design the centralized controller. Therefore, both practically and theoretically, it is meaningful to devise a hybrid position–force controller that combines decentralized control and centralized control method.
In this article, a hybrid position–force control method is proposed for a constrained reconfigurable manipulator system. In the presence of model uncertainty and external constraints, the reduced dynamic model for the reconfigurable manipulator is formulated. Combining the decentralized control and centralized control method, a hybrid position–force controller is designed for the joint subsystems and the constraints to achieve position–force control of constrained reconfigurable manipulator. The adaptive NN system is used to compensate the dynamic model uncertainty and the dynamic coupling effect. The Lyapunov theory is used to prove the stability of the closed-loop system. Finally, simulations are performed for two 2-degree-of-freedom (DOF) reconfigurable manipulators under different constrained tasks to illustrate the effectiveness of the proposed method.
The rest of this article is organized in the following form. Section “Problem formulation” outlines the reduced-order dynamic model of the reconfigurable manipulator. The proposed hybrid position–force control method is presented in section “Adaptive NN controller design and stability analysis,” and simulations are presented in section “Simulation results.” Concluding remarks are given in section “Conclusion.”
Problem formulation
Consider a reconfigurable manipulator with n-DOF completing a task in a constrained environment, m-dimension constraint is expressed as an algebraic equation of the coordinate

where
Under the environment constraint, the dynamic model of reconfigurable manipulator with n-DOF can be described as follows

where
Assumption 1
The kinematic constraint is given as a rigid surface and frictionless, refers to the fact that the end-effector involved has to track a certain prespecified desired position without losing contact with it.
Assumption 2
Desired joint position
Assumption 3
Desired constrained force
Assumption 4
Reconfigurable manipulator operation should stay away from any singularities to ensure Jacobian matrix full rank.
Because of the presence of constraint, the configuration space of manipulator remains (n − m) DOFs, so that the joint coordinate

By the implicit function theory, the constraint equation is expressed as

Differentiating equation (3) with respect to time yields

where

Substituting equations (5) and (6) into equation (2), the dynamic equation of the manipulator can be rewritten as follows

Then, one can rewrite equation (7) as the following form

where

So that the dynamic equation (8) can be reformulated as follows

with
where
Define

where

Adaptive NN controller design and stability analysis
According to the assumptions 2 and 3, due to the desired joint position

The time derivative of

Let

Substituting equation (16) into equation (15), and give


In the case of ideal dynamic model,

where

Define the Lyapunov function candidate as follows


The time derivative of equations (21) and (22) can be obtained as follows

and
According to the Lyapunov stability theorem, the closed-loop system is stable under the control (19).
However, due to the dynamic model uncertainties, the terms
Define


where


In equations (27) and (28),


Define the estimation errors as follows


where
Then, one can use the term

where
Assumption 5
The interconnection items

where

Define the expected error as

Then, we can design the control law as follows

Remark 1
In order to eliminate the high-frequency chattering caused by the sign function in the control law, a saturation function is used to replace the sign function. The saturation function is defined by

where
Substituting equations (31), (32), and (37) into equation (12), then one can obtain the following error equation

Note that the design objective involves specifying the control term
Theorem
Consider an n-DOF constrained reconfigurable manipulator, with the dynamic model as formulated in equation (2) and the model uncertainties that exist in equation (13). The desired position and constrained force can be tracked within a finite time interval, and the tracking errors are bounded under the hybrid position–force control designed by equation (37), in which the adaptive updating laws are given as follows



where
Proof
Define the Lyapunov function candidate as follows

where

Then, one can obtain the time derivative of equation (44) as

Substituting equation (39) into equation (45), we can obtain

Combining equations (40) and (41) with equation (42) yields

Substituting equation (34) into equation (47), we have
Using Chebyshev inequality, one can obtain that

Combining equations (35) and (48) with equation (49) yields
It is clear that the time derivative of
Simulation results
In order to verify the validity and reliability of the proposed hybrid position–force control method, two 2-DOF constrained reconfigurable manipulators with different configurations are used to conduct the simulations, 28 which are shown in Figure 1.
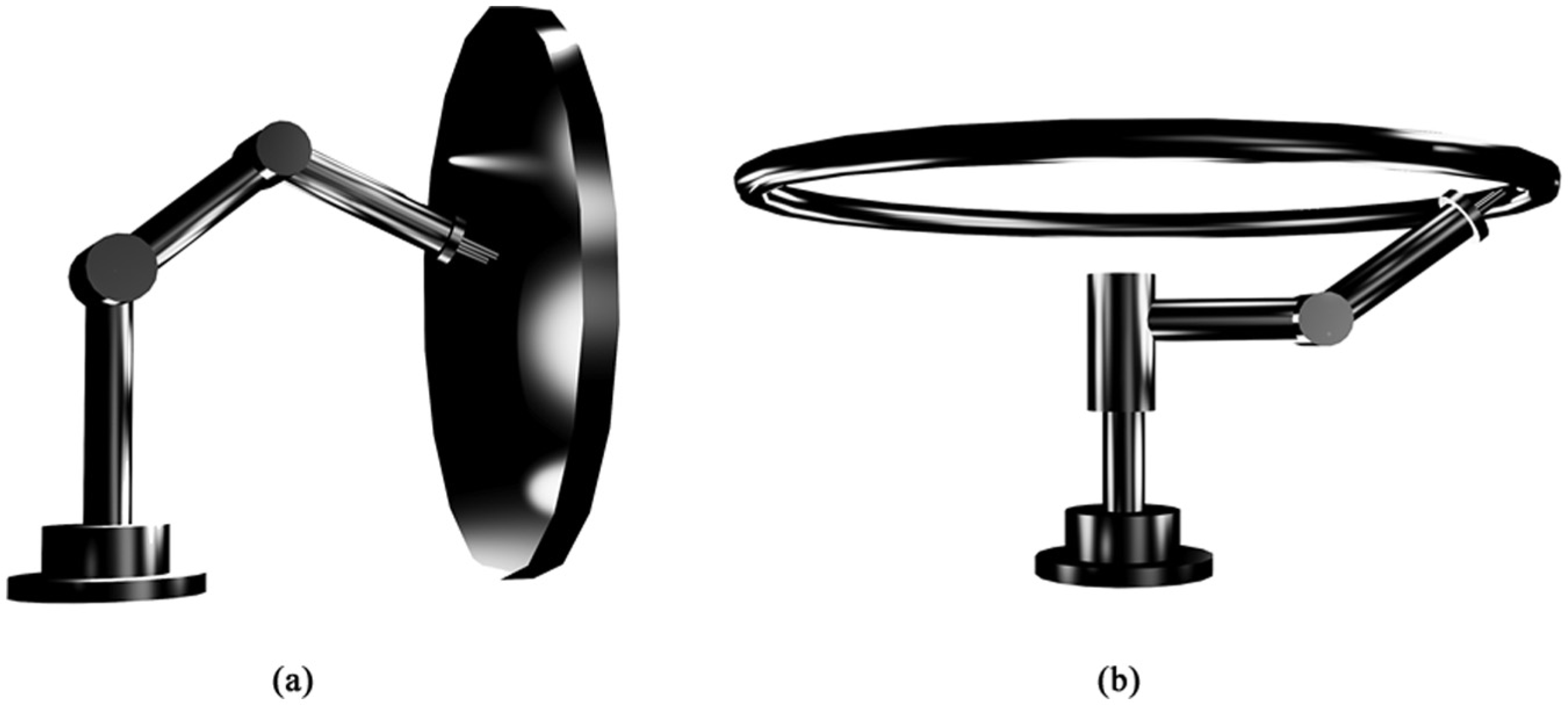
Configurations (a) A and (b) B for simulation.
For the sake of the facilitation of the analysis of the configurations above, we can transform them into a form of analytic charts, which are shown in Figure 2. The dynamics of configuration A are defined as follows





Analytic charts of configurations (a) A and (b) B.
Consider the environmental constraint as

where



the initial position and velocity are
For each system, the RBF NN which contains three layers is applied to approximate

where
As shown in Table 1, the parameters of the proposed controller are chosen to reduce the trajectory tracking error, while satisfying the conditions of the assumptions and constraints in section “Problem formulation.”
Parameters of the controller.

The simulation results are shown in Figures 3–6. The dotted curves and the solid curves represent the desired curves and actual curves, respectively; it is obvious that the proposed methods are with the advantages of tracking performance, control precision, and error fluctuation. As shown in Figure 3, the tracking error of the joint occurs only at the beginning of the process due to the lack of knowledge about the dynamical model subsystem; it needs some time to train the unknown functions for NN. After 1.3 s, the actual positions can track the desired positions accurately, and the error fluctuation is almost small. Figure 5 shows the constrained force tracking curve; the larger error of the constrained force occurs in 1.3 s because training unknown functions needs some time for NN and then it converges rapidly; the actual constrained force can track the desired force accurately. It can be concluded that high performance of the position and force tracking are achieved with almost smooth control effort. Figure 6 shows the control torque curve, and after 0.8 s, the control torque varies in the range of 10 N m which fully satisfies the output torque provided; moreover, the control torque is very smooth, and the chattering is small.

Position tracking curves of joint 1 for configuration A.

Position tracking curves of joint 2 for configuration A.
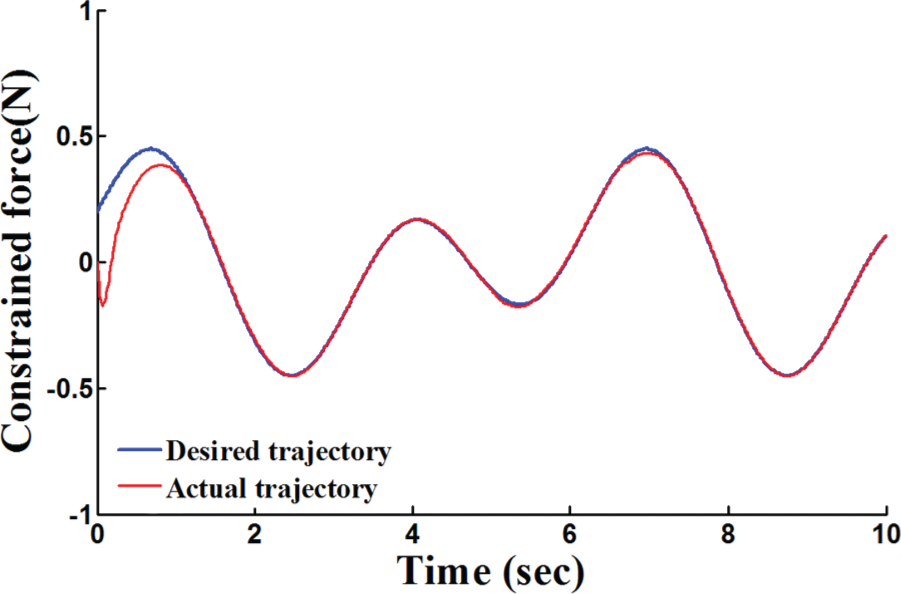
Constrained force tracking curves for configuration A.
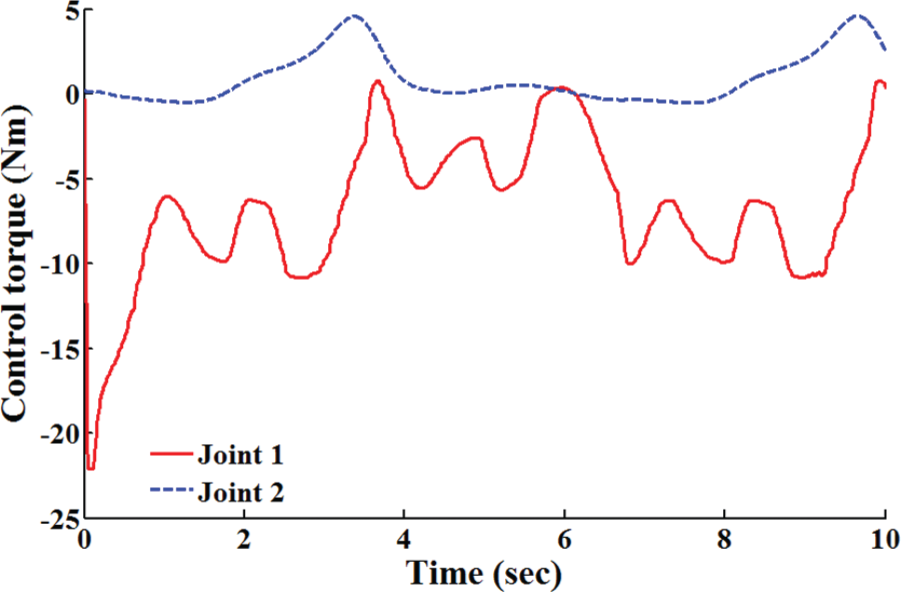
Control torque for configuration A.
In order to verify the effectiveness of the proposed control method for different configurations, configuration B with a circular path is used to conduct the simulation under the same control law without changing the control parameters.
The dynamics of configuration B are given as




Consider the environmental constraint as

which is chosen based on the reachable workspace of the manipulator in Figure 2.
The desired position of the joint and the desired constraint force are given as



The initial position, velocity, and the control parameters are identical to configuration A. The position tracking curve, force tracking curve, and control torque curve of configuration B are shown in Figures 7–9. Comparing the two conditions of constraints for configurations A and B, we can find that there is an explicit function relationship between the independent joint and the constrained joint in the constraint for configuration A, whereas that of configuration B is not; thus, the constrained joint variable is constant.

Position tracking curves of joint 1 for configuration B.

Constrained force tracking curves for configuration B.

Control torque for configuration B.
The simulation results illustrate that the proposed control scheme can be effectively applicable to different configurations of reconfigurable manipulators without changing any control parameters. This is an important advantage for controlling reconfigurable manipulator to complete different tasks in constrained environment with a requirement of frequent conversion from one configuration to another.
Conclusion
In this article, a novel position–force control scheme is proposed for the reconfigurable manipulators with different configurations. In the presence of model uncertainty and external constraints, the dynamic reduced model for reconfigurable manipulators is built to reduce the complexity of the system model. A hybrid position–force controller that combines decentralized control with centralized control scheme is designed to control the position and force of the constrained reconfigurable manipulator. The adaptive NN system is designed to compensate the dynamic model uncertainty and the dynamic coupling effect. The stability analysis of the closed-loop control system is performed by the Lyapunov theory. Finally, the performance of the proposed method is verified by the numerical simulations.
In the future, more complex configurations for time-varying external constrained reconfigurable manipulator will be considered, and the controller with higher control precision and error performance will be included. Therefore, the decentralized controller with higher control and error precision can be included.
Footnotes
Academic Editor: Long Cheng
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by National Natural Science Foundation of China (grant nos 61374051 and 60974010) and the Scientific and Technological Development Plan Project in Jilin Province of China (grant no. 20150520112JH).