
Abstract
The camera always suffers from image instability on the moving vehicle due to unintentional vibrations caused by road roughness. This article presents an adaptive neural network approach mixed with linear quadratic regulator control for a quarter-car active suspension system to stabilize the image captured area of the camera. An active suspension system provides extra force through the actuator which allows it to suppress vertical vibration of sprung mass. First, to deal with the road disturbance and the system uncertainties, radial basis function neural network is proposed to construct the map between the state error and the compensation component, which can correct the optimal state-feedback control law. The weights matrix of radial basis function neural network is adaptively tuned online. Then, the closed-loop stability and asymptotic convergence performance is guaranteed by Lyapunov analysis. Finally, the simulation results demonstrate that the proposed controller effectively suppresses the vibration of the camera and enhances the stabilization of the entire camera, where different excitations are considered to validate the system performance.
Keywords
Introduction
Camera stabilization is of great importance to visual guidance in autonomous vehicle, and the goal of image stabilization is to remove unwanted motion from dynamic camera sequences. 1 The better image-acquisition process will increase the feasibility and reliability of the process and analysis afterward. Current efforts in the research of image stabilization techniques can be broadly classified into three major categories: optical stabilization, 2 digital image stabilization, 3 and mechanical stabilization. 4 The ability of vibration amplitude control in optical and digital image stabilization is relatively limited. Different from the former two stabilizers, mechanical stabilization aims to stabilize the entire camera, not just the image. It is used for the camera under large moving situation. When the camera is fixed on the top of the car, the vertical vibration amplitude of the camera has to be reduced. Therefore, an active suspension system (ASS) is applied as the mechanical stabilization that can suppress the large vertical vibration caused by road roughness.
In the automobile, the roles of a suspension system are to support the vehicle weight and to isolate the vehicle body from road disturbances. The conventional vehicle suspension reduces the effect of the vibrations by passive elements such as springs and dampers. These elements are normally chosen based on the system’s design requirements and are generally fixed. However, the ASS can provide extra force through the actuator between sprung and unsprung masses and increase ride comfort and vehicle road handling. 5 Despite their high cost and power consumption, this mechanical structure can ensure a stable platform for the camera to detect the obstacles.
Many of the academic studies reported in the literature have used vibration analysis to probe the behavior of suspension systems, and it remains a challenge to design an active suspension as the mechanical stabilization system because the presence of uncertainties and unknown road disturbances result in the suspension parameters inevitably suffering from perturbation. 6 Many control schemes such as H∞ control, 7 optimal control, 8 sliding mode control (SMC), 9 and adaptive control 10 are proposed for ASSs. Yoshimura et al. 11 and Shehata et al. 12 applied model-free strategies such as the fuzzy control and achieved good closed-loop result. Furthermore, if the road disturbance input to the active suspension can be previewed in real time, the system with preview controller can give better performance. 13 The road information could be obtained using special sensors 14 or the vehicle dynamic response. 15 But the sensors definitely increase the cost of the car and easily introduce noise.
Recently, the neural networks (NNs) have received increasing attention mainly due to its advantages of approximating uncertain nonlinear functions in dynamic system. A number of research fields have a lot of literatures about NN approximation method, such as the robotic manipulator control,16,17 aircraft control,18,19 autonomous underwater vehicles control,20,21 and consensus control of multi-agent systems.22,23 By the use of universal capability, the adaptive controller based on NN can be designed without accurate prior knowledge of the system dynamics. However, few articles have used NN approximation method in active suspension control. In Yildirim, 24 an NN scheme employs an adaptive tuning for controlling a bus suspension. In Lin and Lian, 25 a hybrid self-organizing fuzzy radial basis function NN controller is proposed in manipulating an ASS to reduce the power spectral density (PSD) of the vehicle body acceleration. An interval type 2 fuzzy-NN indirect adaptive control approach is presented for ASS in Zirkohi and Lin. 26
In this article, by combining the merits of adaptive NNs with linear quadratic regulator (LQR) control, a novel mixed control approach is proposed in a unified framework to eliminate the influence of the road disturbance, where a quarter-car active suspension model is considered. The control law is designed by comprising of a feedback part and a compensation component. The feedback part computes the optimal solution for a given objective function. Meantime, adaptive radial basis function neural network (RBFNN) 27 is developed to construct the map between the state error and the correction part, and the weight matrix can update online using Lyapunov stability theory. Therefore, no prior training data are required for the training of the adaptive RBFNN. The performance of the closed-loop system is guaranteed by suitably choosing the design parameters. Finally, the effectiveness of the proposed control approach is demonstrated by simulations under different road profiles.
The rest of this article is organized as follows: section “Suspension system dynamic and problem formulation” presents a quarter-car dynamic model of vehicle suspension, the proposed control method is developed in section “Controller design,” section “Simulations” provides the simulation results, and section “Conclusion” summarizes the results of this study.
Suspension system dynamic and problem formulation
This article considers the quarter-car active suspension model with a camera installed on the top of vehicle as shown in Figure 1. The camera is rigid connected with the vehicle body. And the sprung mass

Quarter-car model with an active suspension.
The dynamic equations of the suspension system can be expressed as


With state vector


where

The objective of this article is to design a controller to suppress vertical vibration of the camera, so that the target is stable in image plane. Since the camera is rigid connection with the car body, the displacement of the car body
Assumption 1. The active suspension is controllable.
Assumption 2. The road profile disturbance
Lemma 1
28
Let

where

Assuming

with
Controller design
The problem of vibration suppression is studied to improve the stabilization of the camera, and the design of the adaptive NN approach combined with LQR controller is presented in this section. The desired value of the body displacement

Control flowchart of active suspension system.
Designing an LQR regular
In ASS, the LQR is a combination of an optimal state-feedback controller. The performance index for the LQR controller is

where

where Q is a positive semi-definite matrix and R is a positive definite matrix

in which
Based on the state vector

where

Constructing the hybrid controller
In this article, the control law is designed as 29

where
The dynamic model of ASS is transformed as

The error

Due to
The derivative of the error can be obtained as follows

where

where
The error dynamic of ASS in equation (15) can be expressed as

Theorem 1
Consider the system dynamics described by equation (13), under assumption 1 and assumption 2, given that all signals are available, and the weights of the NNs and the compensation component are chosen as


where

where Q is a symmetric positive definite matrix. Then, the overall adaptive scheme guarantees that the trajectories of the closed-loop system are uniformly bounded, and the closed-loop error signals
Proof
Consider the following Lyapunov function candidate

where
The time derivative of

Therefore, the equation (22) is transformed as



Substituting equations (18) and (19) into equation (25)


So, we have

Therefore, the error dynamic model of ASS is an asymptotically stable. This further implies that the tracking error can gradually converge to zero.
Simulations
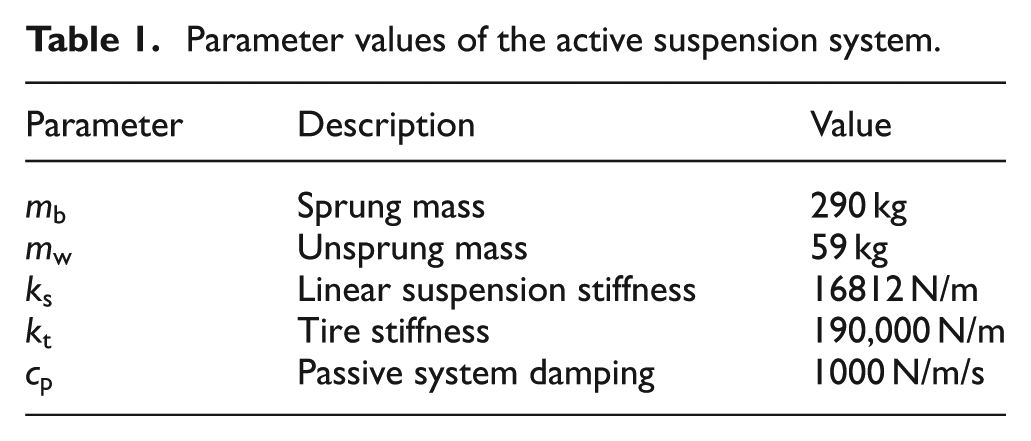
In order to evaluate the efficacy of the proposed control strategy, some numerical simulations were performed for the quarter-car model of vehicle suspension. The parameters of the vehicle suspension are listed in Table 1. The time step of the simulation is 1 ms. In simulations, the LQR controller is also adopted for comparison purpose to validate the performance of the designed controller.
Parameter values of the active suspension system.
Model of road profiles and road roughness
In order to evaluate the performance of the designed controller, we consider three typical cases.
Case 1
As the resonance frequency of the car body is about 1 Hz, an external excitation close to this frequency might induce unwanted oscillation. Then, to test control performance near the system resonance frequency, the road profile is considered as

Case 2
Consider a sine bump in an otherwise smooth road surface. The mathematical description of this type ground displacement is given by

where

Bump road profile.
Case 3
Consider the road excitation which is consistent and typically specified as a random process with a ground displacement PSD of


where

Random road profile.
Comparison of the controller performance
The value weights of the LQR are selected as
According to the numerical result of sinusoidal road excitation in Figure 5, the displacement attenuation of the camera (sprung mass) with the proposed NN-LQR controller is dramatically improved and the maximum deflection is kept within ±0.032 mm. It can be observed that the maximum camera displacement has been reduced from 0.281 to 0.011 mm. In Figure 6, the root mean square (RMS) values of the body acceleration with NN-LQR are 3.6 × 10−3, while the RMS value is 4.7 × 10−3 by LQR. At the beginning, the weights of NN are in the iterative calculation, and it gradually converges after 2 s. When the system is stable, it can be observed that the maximum body acceleration has been reduced from 0.01 to 0.004 m/s2. The actuator force is shown in Figure 7.

Body displacement (case 1).

Body acceleration (case 1).

Actuator force (case 1).
When a vehicle is crossing on the bump terrain, the dynamic responses of the camera position using NN-LQR and LQR controllers are shown in Figure 8. It can be observed that NN-LQR has obvious performance improvement. The mean amplitude of sprung mass displacement is 2 mm, and the curve converges to 0 within 2.4 s by NN-LQR method. In Figure 9, the maximum value of body acceleration by NN-LQR is 1.2 m/s2, which is smaller than the value with LQR method. In addition, the tire deflection is shown in Figure 10.
Body displacement (case 2).

Body acceleration (case 2).

Tire deflection (case 2).
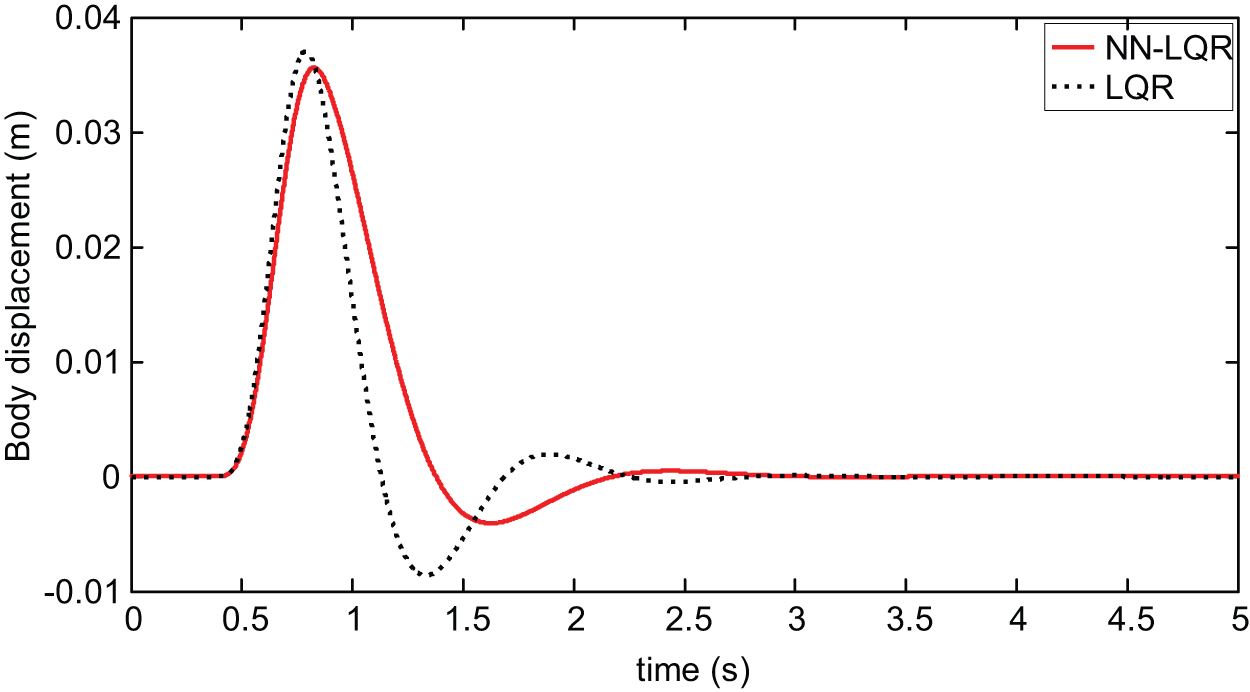
The dynamic responses of the sprung mass displacement with the random excitation are shown in Figure 11. The maximum value of the sprung mass displacement with NN-LQR is 0.4 mm, while the maximum value is 2.4 mm by LQR. As shown in Figure 12, the fluctuation amplitude of the red line with NN-LQR is smaller than the black dotted line. In addition, the estimation of
Body displacement (case 3).

Body acceleration (case 3).

Estimation of
From the above results of the simulation, it could be observed from Figures 8 and 9 in case 2 that the closed-loop system with NN-LQR has a faster dynamic property. Furthermore, Figure 11 indicates that the vertical vibration of the camera is much smaller in the NN-LQR method for the resonance frequency of the car body, which improves the stabilization for capturing images. Therefore, the NN-LQR method possesses a faster dynamic property and has a better performance on the whole.
Conclusion
The vibration of the camera will directly affect the image quality and impede the subsequent processes. Therefore, the study of the image vibration attenuation is important in the practical applications. In this article, a mathematical model of the quarter-car ASS is established. The adaptive NN-based LQR control approach is proposed to reduce the vertical vibration of the camera. And the RBFNN constructs the map between the state error and the compensation to improve the system performance via online correction. The weights of NNs are regulated online, and the learning convergence is thus guaranteed. With the proposed method, the displacement oscillation amplitude of the camera is suppressed efficiently. The closed-loop stability and asymptotic convergence performance are proved by Lyapunov theory. The simulation results have demonstrated the efficiency of the proposed scheme under different road conditions. Therefore, the ASS with the proposed controller has a fast convergence, which can effectively enhance the stabilization of the entire camera.
Footnotes
Academic Editor: Long Cheng
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is partially supported by the National Science Foundation of China under the contract no. 51005018, and this article is also funded by International Graduate Exchange Program of Beijing Institute of Technology.