
Abstract
This article addresses the trajectory tracking control of underactuated unmanned underwater vehicles, where the control structure is designed to synchronously follow the mother submarine with only available position information. The controller is derived using the virtual guidance strategy and backstepping-based design techniques. The virtual guidance system is first constructed to eliminate the measurement of the mother submarine’s velocity and dynamics. The convergence and effectiveness of the virtual guidance system are proven using Lyapunov stability theory. In addition, to enhance the robustness of the underactuated vehicle against the unmodeled dynamics and unknown disturbances from the environment, radial basis function neural networks are finally used to approximate the nonlinear uncertainties. Under the proposed control, semiglobal uniform boundedness of the closed-loop system is guaranteed for adequate choices of the controller gains. A simulation example is included to demonstrate the effectiveness and robustness of the approaches suggested.
Keywords
Introduction
The high-precision tracking control of unmanned underwater vehicles (UUVs) is extremely important, for it is a basic technique for successfully accomplishing underwater specified tasks such as deep sea inspections, long-distance surveys, oceanographic mapping and resource exploration. 1 However, the control problem of underactuated underwater vehicles is still very challenging. The main difficulties can be summarized in the following issues: (1) the dynamics of UUVs is usually highly nonlinear and coupled, and the hydrodynamic coefficients are impossible to be determined accurately; 2 (2) the ocean disturbances cannot be negligible in the trajectory tracking control for UUVs; 3 (3) reliable information exchange between UUV and submarine is quite difficult due to the weak underwater communication; 4 and (4) motivated by cost and weight considerations, more and more UUVs are underactuated, which represent fewer independent actuators than the number of degrees of freedom and then dynamic models of underactuated vehicles result in systems with second-order nonholonomic constraints. 5
Control of underactuated UUVs is an active topic of research. 6 In Do et al., 7 a global output feedback controller was proposed for stabilization and tracking of underactuated omni-directional intelligent navigator (ODIN), a spherical underwater vehicle. Also, based on a linearized error space model, a static output feedback controller was designed and implemented using Serret–Frenet frame in Subudhi et al. 8 In general, however, the velocities of the vehicles are very difficult to be accurately measured, which causes full-state feedback scheme to be not feasible. Hence, in Zhang et al., 9 an adaptive output feedback controller based on dynamic recurrent fuzzy neural network (DRFNN) was proposed, in which the locational information is only needed for the controller design. Based on the model, one can predict the motion of the vehicle using controller actuator inputs and available state measurements. 10 Experimental results, reported in Whitcomb and Yoerger 11 and Zhao and Yuh, 12 demonstrated successful controller performance. In Refsnes et al., 13 a model-based output feedback controller was proposed for slender-body underactuated autonomous underwater vehicles (AUVs) where sea trials of Minesniper MKII were performed. Despite the wide range of applications and the large number of control strategies developed, most of them highly rely on the assumption that both the velocity and position of the reference trajectory are known for navigation, guidance, and control.
Nowadays, in numerous practical applications, there is an increasing demand that UUVs should synchronously track all states of a moving target, which can be another underwater vehicle, including the real-time position, attitude, and velocities rather than a predefined trajectory. In this article, we are interested in the problem when the only information available about the reference signals is the position of the moving target. This type of problem is motivated by an interesting and attractive scenario. The case is that a mother submarine is performing a maneuver along a predefined trajectory, while an UUV in a configuration master or slave is required to follow the mother submarine. Note that the UUV can only use the Doppler Velocity Log (DVL) to generate accurate velocity measurements when the distance to seafloor is within a certain boundary. 14 This restriction in the instrumentation contributes to increase challenges for accurate tracking. Therefore, to improve the performance, the virtual guidance control scheme is proposed in this article to eliminate measurement requirement of velocity and dynamics of mother submarine. Since the presented virtual guidance system can work independently of these velocity measurements, it contributes to increase reliability of the control system by providing analytical redundancy to the measurements.
In fact, the submarine or UUV application scenario considered in this article is more like one type of pursuing or target tracking problem. Different from leader–follower formation control in previous works,15–17 the dynamics and velocity of the maneuvering submarine are unknown and uncontrollable. To overcome this problem, one should obtain the reference trajectory of the UUV based on the only position information from the mother submarine. Fortunately, there are some schemes described in the literature to resolve the tracking control problem without velocity measurement. Particular examples can be found in the area of leader–follower formation control and the pursuing or target tracking problem. In the leader–follower formation control of multiple underactuated AUVs, 18 the follower tracked a reference trajectory based on the leader’s position and predetermined formation without the need for its velocity. In the tracking control of robot manipulators, 19 a pseudo-filtered tracking error signal was designed to eliminate the need for velocity measurement. A similar control strategy, in combination with backstepping and Lyapunov direct design technique, was applied for robust formation control of multiple nonholonomic mobile robots. 20 In target tracking problem of autonomous robotic vehicles, 21 a switched logic-based control strategy was proposed to solve the pursuing problem using range-only measurements. It is important to stress that most of the aforementioned tracking controllers would make the vehicle to move toward a maneuvering target at a constant speed, which results in unnatural trajectories. This significantly restricts the class of reference trajectories to be used for practical applications. However, uncertainties exist in any realistic system because of systematical modeling errors and the perturbations from external environment. Therefore, trajectory tracking controller designed an assumption that the model is accurate, and no disturbances may fail to work or significantly degrade performance when the systematical parameters are unknown, and the environmental disturbances cannot be neglected.
This article presents successful results of an underactuated UUV synchronously tracking a maneuvering mother submarine without the measurement of its velocity and dynamics, even in the presence of possibly large systematical modeling uncertainty and unknown disturbances. The virtual guidance system is first constructed based on the only available position of the mother submarine. The convergence and effectiveness of the virtual guidance system are proven using Lyapunov stability theory, and then, trajectory tracking controller are designed to make the actual velocities follow these virtual guidance signals to achieve the position and attitude tracking. The main contributions of this article can be summarized as follows: (1) a virtual guidance system is constructed for an underactuated UUV using only position information of maneuvering submarine; (2) with the aid of backstepping and Lyapunov direct method, the trajectory tracking controller for an underactuated UUV is derived, and semiglobal uniform boundedness of the closed-loop system can be guaranteed. Simulation results demonstrate the effectiveness and robustness of the proposed methods; and (3) successful results of radial basis function (RBF) neural networks against systematical uncertainty and unknown disturbances are presented in this article. The key feature of the technique can handle the dynamical uncertainties without the need for explicit knowledge of the model.
The remainder of this article is organized as follows: the mathematical model and preliminaries are presented in section “Mathematical model and preliminaries.” The controller design and analyses are given in sections “Virtual guidance system design” and “Trajectory tracking control design,” respectively. Furthermore, a case study on an underactuated UUV is presented in section “Numerical simulations,” and, finally, the simulation results are shown. Some concluding remarks are given in section “Conclusion.”
Mathematical model and preliminaries
This section describes the kinematic and dynamic models of an underactuated UUV moving in the horizontal plane and then formulates the problem of trajectory tracking control.
Mathematical model
In general, the dynamic behaviors of an underwater vehicle are commonly described in two-coordinate frames, namely, earth-fixed frame and body-fixed frame as shown in Figure 1. In the body-fixed frame, the mathematical model of an UUV presented in this article, with standard notation, can be described as follows 3

where
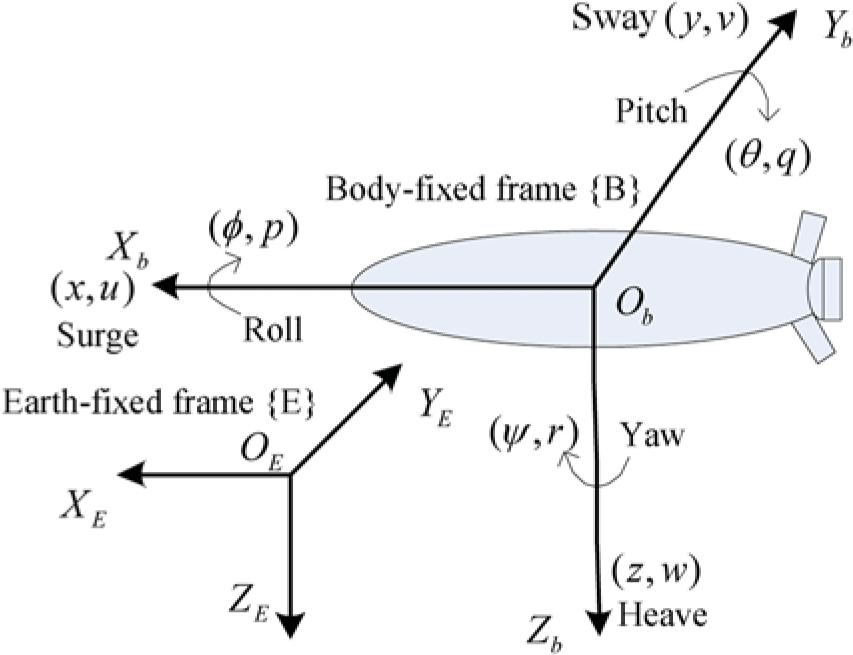
Reference frames of unmanned underwater vehicles.
Without loss of generality, we consider an underactuated UUV synchronously tracking a maneuvering mother submarine in the horizontal plane for applications at a constant depth, such as autonomous underwater recovery, and assume that

also
The mathematical model of an underactuated UUV is described by

Problem formulation
In the trajectory tracking control considered in this article, an underactuated UUV should track a maneuvering mother submarine rather than a predefined trajectory. First, the work we should carry out is that how to implement the guidance dynamics when the UUV cannot accurately obtain the available information of mother submarine’s velocities and dynamics by inertial measurement units (IMU). Second, due to the underactuated property with second-order nonholonomic constraints, UUV cannot be transformed into a driftless-chained system as the mobile robot, so that the control approaches applied for the robots cannot be directly employed in underactuated underwater vehicles. Thus, a much simpler control structure, requiring much less computational effort along with the rigorous stability analysis, is required. Finally, when the dynamics is included, the system has a drift vector field that poses new demands on the controllability analysis and the control design. The issues mentioned above all will be resolved in this article.
Preliminaries
In this subsection, we will recall some definitions and lemmas, which are necessary in the design of the proposed control.
Lemma 1
For bounded initial conditions, if there exists a
Definition 1
The algorithm of RBF neural network can be presented as follows

where the input vector is
According to Ge and Wang,
22
under the following assumptions, RBF neural network can approximate any continuous function to any desired accuracy over a compact set
Assumption 1
The output of RBF neural network is a continuous function
Assumption 2
Under the condition that

where
Virtual guidance system design
The key idea in this subsection is how to design a virtual guidance system, which can ensure that the underactuated UUV could synchronously track the maneuvering mother submarine only by the available position measurement. To design the control input for the virtual guidance system, we generate a pseudo-filtered tracking error signal as in previous works,18–20 to eliminate the need for velocity measurement and dynamics in the control design, and the details are given by the following implementable equations

where the virtual guidance tracking error is defined as

where

Note that the induced norm of the matrix
Theorem 1
Consider the filter dynamics described by equations (5) and (7) satisfying the assumption that the velocity of the vehicle is bounded. Applying the inputs (6) for the virtual guidance system, then for any bounded initial conditions, all the closed-loop signals are uniformly semiglobally practically asymptotically stable (USPAS).
Proof
Similar to Cui et al. 18 and Ghommam et al., 20 consider the following Lyapunov function candidate

Clearly, note that

where we have used the fact that

and

For
Remark 1
At this stage, the convergence and effectiveness of the virtual guidance system is guaranteed using the measurements of the available signals such as the position and orientation. These signals are exploited later to track the trajectory of the virtual guidance with an underactuated UUV.
Trajectory tracking control design
This section presents a Lyapunov-based control law using backstepping technique to design the trajectory tracking control of an underactuated UUV with the dynamic parameters that are uncertainty and unknown disturbances from the environment. Before stating the main result of the note, we first do the coordinate transformation in a form that is easily amenable for stabilization.
Coordinate transformation
To facilitate the design of the controller, the position and orientation errors by coordinate transformation can be obtained easily as follows
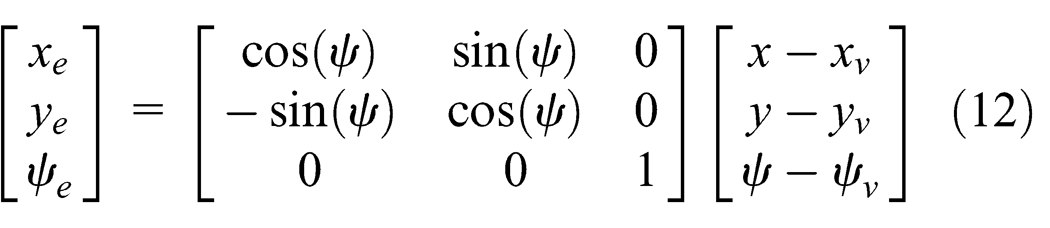
where the orientation and position of the virtual guidance system can satisfy

Then, the derivatives of the position tracking error variables along equation (2) can be obtained

where
Remark 2
Note that the derivatives of the orientation error in this subsection are not introduced. Because it may cause the constraints on initial error conditions of the vehicle according to the results previously investigated in literature7. However, fortunately, we can clearly see that the orientation error can also reflect on the position errors due to the coupled property of underwater vehicle from equation (14). Then, we will introduce an indirect method to work out the problems of the orientation and velocity tracking.
Backstepping-based dynamic control
Based on equation (14) derived in the prior subsection, the trajectory tracking controller is designed using the backstepping method.
Step 1: Consider the following Lyapunov function candidate

Taking the derivate of equation (15) along the solutions of equation (14) yields

The traditional design method is to choose

From the expression of the virtual variation, it makes the control of
Then,

where

Then, computing the corresponding error dynamics by equations (18) and (19) yields

Step 2: Consider the Lyapunov function candidate

Now, the task is to stabilize the errors

The control input

where

Second, as a similar procedure, differentiating

Before proceeding to the next step of the design, some manipulations on the virtual error dynamics equation can be performed. In order to make

where

Finally, computing the corresponding error dynamics by equations (25)–(27) yields

Step 3: Consider the following Lyapunov function candidate

Then, differentiating

The control input

where

Remark 3
In the practical applications, since the parameters
Adaptive compensation and stability analysis
For underwater vehicles, it is difficult to accurately measure the hydrodynamic coefficients and environmental disturbances. Hence, the system dynamics are not exactly known. Here, we define the uncertain terms of the systematical model as follows

where

where

where

Applying Young’s inequality to the term

Accordingly, it yields
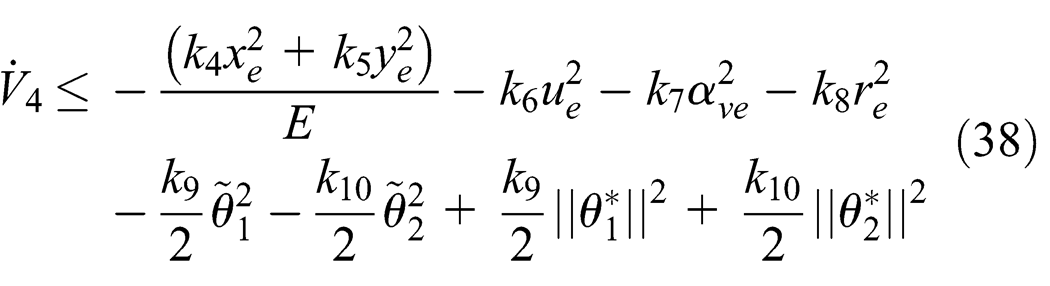
Then

Theorem 2
Consider the underactuated UUV with dynamics (2) satisfying assumptions 1 and 2, under the actions of the control law (34). For each compact set
Proof
From equation (39), using the Comparison Lemma yields

Therefore, the closed-loop system is semiglobally uniformly bounded. The convergence and effectiveness of the tracking errors can be guaranteed by properly increasing
Remark 4
Although this article can guarantee semiglobally uniformly bounded of the system, global uniform asymptotic stabling (UGAS), which is preferred in the control design, is not given. Hence, the design techniques based should be further improved in the future. The control scheme of the UUV system is shown in Figure 2.
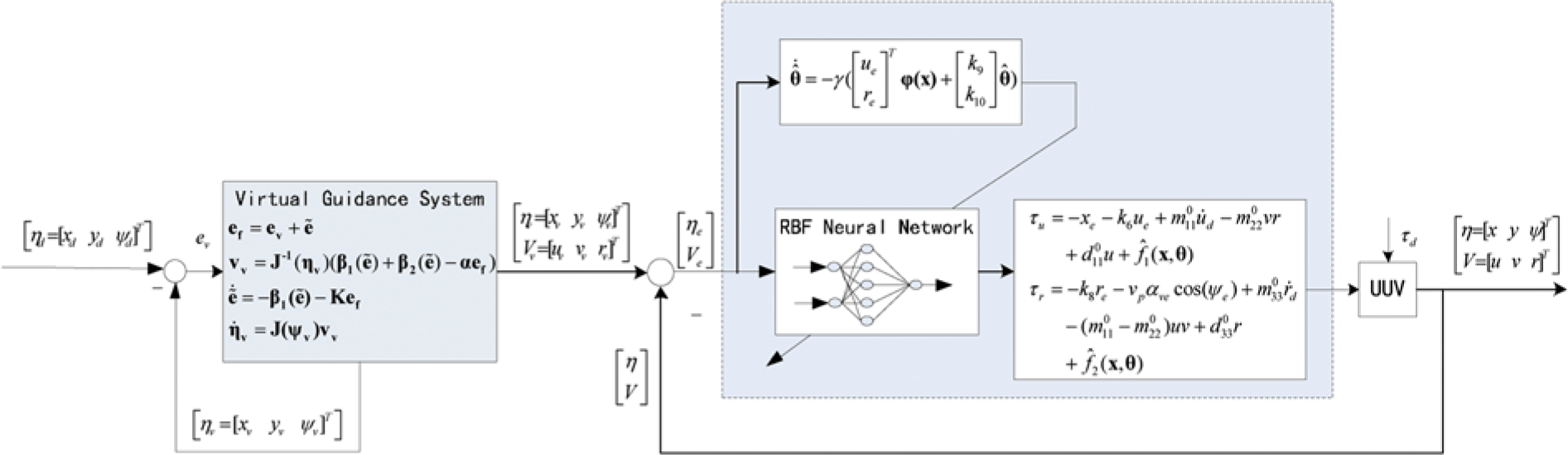
Control scheme of an underactuated UUV.
Numerical simulations
In this section, a simulation example is included to illustrate the effectiveness and efficiency of the proposed control scheme. The simulation studies are performed on an underactuated UUV without side thruster, which has only the control inputs on surge and yaw directions, implementing in MATLAB or Simulink, and the framework of the system is shown in Figure 3.
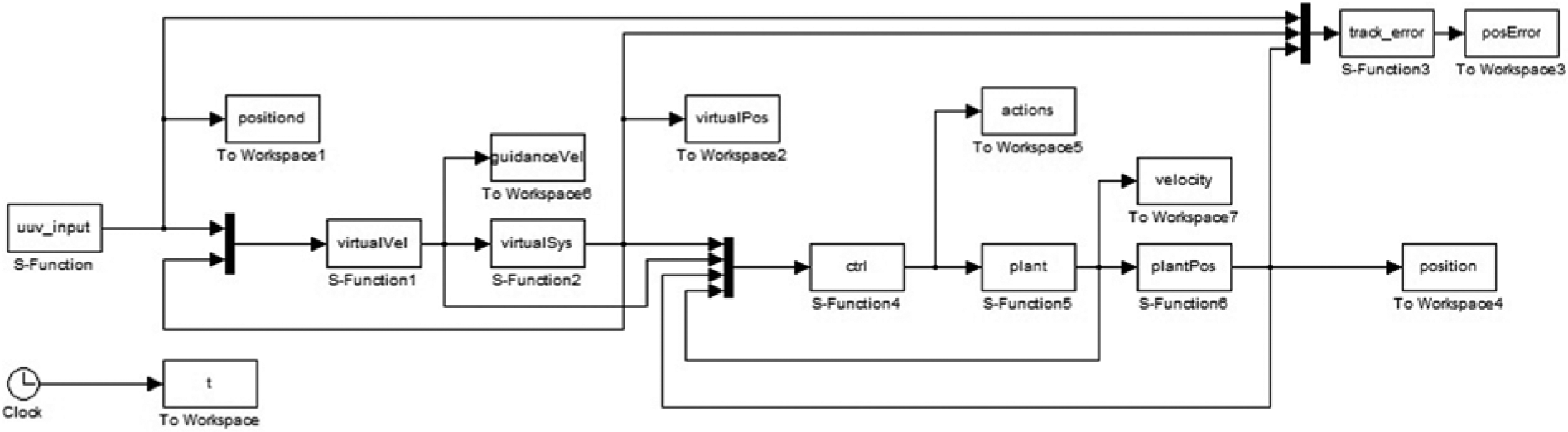
MATLAB or Simulink framework for the trajectory tracking controller.
The aim of the simulation tests is summarized as follows: (1) to verify the feasibility of the designed virtual guidance system, (2) whether the proposed trajectory tracking controller can satisfy the demands of underaction and synchronization in submarine or UUV application scenario, and (3) to show the robustness of RBF neural network against the systematical uncertainties and unknown disturbances.
Simulation case is the trajectory tracking control of underactuated UUV in the horizontal plane. The mother submarine will move as a trajectory with a specified timing law, which looks like “∞.” Specially, the trajectory is described by

In all simulations, the vehicle moves from the initial position
Virtual guidance system:
Backstepping-based dynamic controller:
RBF neural network:
And other design parameters are selected as
In order to more comprehensively illustrate the performance of the proposed scheme, without loss of generality, we define the disturbance as time-varying forces or moment in frame {E}

Then, in body-fixed frame {B}, the external disturbances acting on the UUV can be presented as follows:

In addition, the uncertainty of the systematical model is considered in the simulations. Specially, we assume that the system parameters will simultaneously increase 10% to the actual model. The hydrodynamic coefficients and inertial parameters of an UUV are shown in Table 1.
UUV hydrodynamic parameters.
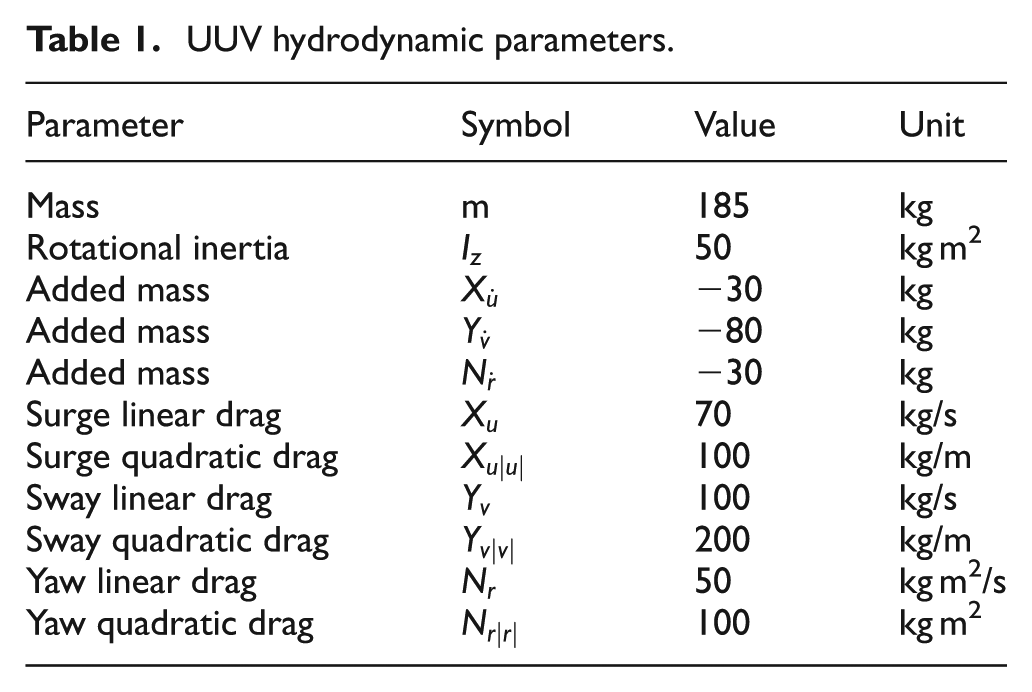
Figure 4 shows the trajectories of the maneuvering mother submarine, underactuated UUV, and virtual guidance system. In order to more comprehensively illustrate the tracking performance, the synchronously tracking errors between the UUV and mother submarine are shown in Figure 5. It is clearly seen that the tracking errors converge to a compact set, which is bounded, by the analysis described in subsection “Adaptive compensation and stability analysis.” One of the features of the trajectory tracking is the requirement of time-varying velocities of the vehicles compared with the path following. Thus, the tracking performance of the system, when the velocity in surge, sway, and yaw changes with timing law, is duly analyzed in Figure 6. These results confirm that the proposed control scheme is able to regulate and stabilize the dynamic behaviors of the underactuated UUV in the trajectory tracking in spite of the systematical uncertainty and additional disturbances. Furthermore, to verify the effectiveness and efficiency of RBF neural network in the control design, Figure 7 shows the results of the systematical uncertainty and self-adaptive estimation. It is clearly seen that the uncertainties are time varying and unknown, not constant as presented in many articles. This is the advantage of RBF neural network and the reason why we utilize the technique in this article. Finally, values taken by the control actions so that the underactuated UUV can synchronously track the maneuvering mother submarine are shown in Figure 8. It is noted that the magnitude of the control inputs is considerably influenced by the initial position errors. Fortunately, under the proposed control, the control inputs are restrained in the limited range even in the presence of large initial constraints. This can be verified in Figure 8. As shown in Figures 5 and 8, with the initial position error

Tracking trajectory in the x–y plane.

Tracking errors.
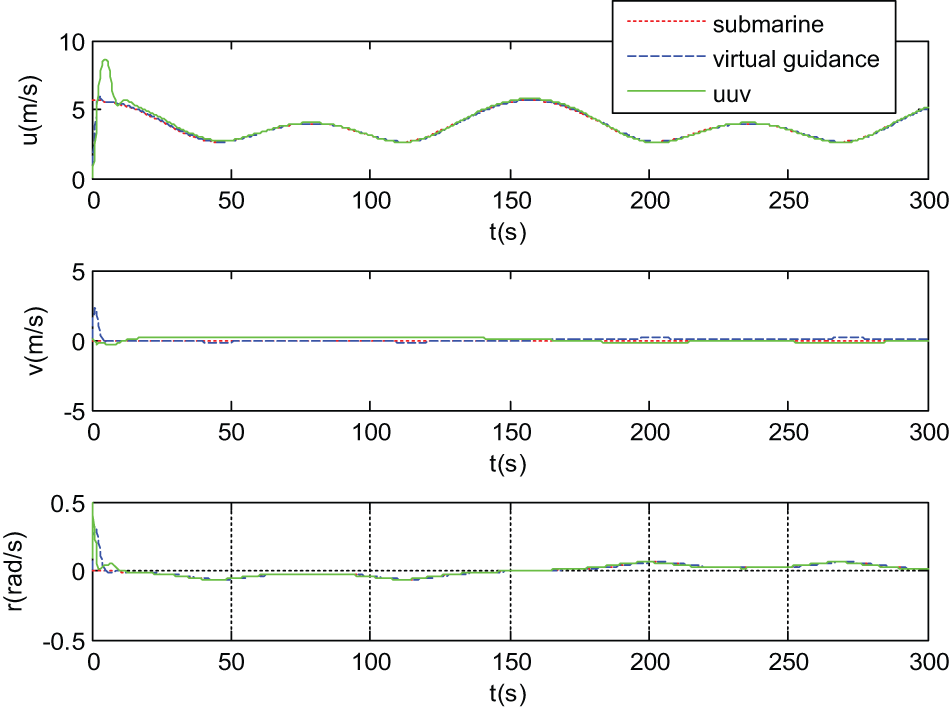
Simulation results of surge, sway, and yaw velocities.

Simulation results of self-adaptive estimation.
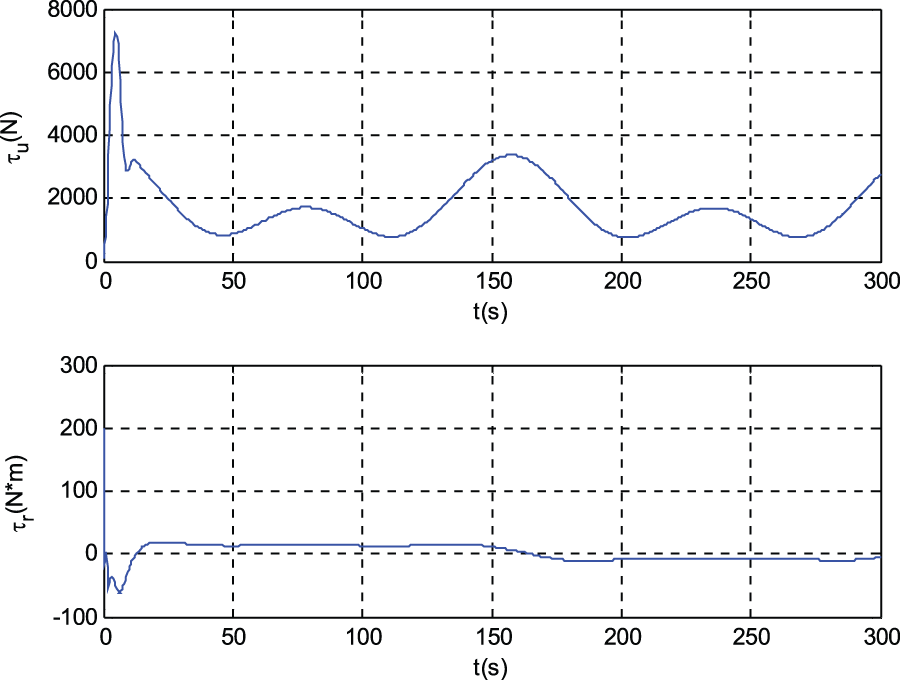
Control actions of the underactuated UUV.
Conclusion
In this article, a trajectory tracking controller is proposed for an underactuated UUV, which can synchronously follow a maneuvering mother submarine without the need for the velocity measurement and dynamics of the submarine. To enhance the robustness of the vehicle against the systematical uncertainties caused by the unmodeled parameters and unknown disturbance from underwater environment, RBF neural network is utilized in this article and a simulation example is included to demonstrate the effectiveness and advantages of the technique. Furthermore, the complete analysis and proofs are given using Lyapunov stability theory, and semiglobal uniform boundedness of the overall system is guaranteed. Further work involves achieving more improved theory that the controller is UGAS in attempt to optimize the performance of the vehicle and underwater experiments.
Footnotes
Academic Editor: Fakher Chaari
Declaration of conflicting interests
The authors declare that there is no conflict of interest.
Funding
This work was supported by the National Nature Science Foundation of China under grant 51409055 and Harbin Engineering University Science and Technology on Underwater Vehicle Laboratory under grant 9140C270208140C27123 and partly supported by the Fundamental Research Funds for the Central Universities under grant HEUCFX041402.