
Abstract
This article proposes a linear matrix inequality–based robust controller design approach to implement the synchronous design of aircraft control discipline and other disciplines, in which the variation in design parameters is treated as equivalent perturbations. Considering the complicated mapping relationships between the coefficient arrays of aircraft motion model and the aircraft design parameters, the robust controller designed is directly based on the variation in these coefficient arrays so conservative that the multidisciplinary design optimization problem would be too difficult to solve, or even if there is a solution, the robustness of design result is generally poor. Therefore, this article derives the uncertainty model of disciplinary design parameters based on response surface approximation, converts the design problem of the robust controller into a problem of solving a standard linear matrix inequality, and theoretically gives a less conservative design method of the robust controller which is based on the variation in design parameters. Furthermore, the concurrent subspace approach is applied to the multidisciplinary system with this kind of robust controller in the design loop. A multidisciplinary design optimization of a tailless aircraft as example is shown that control discipline can be synchronous optimal design with other discipline, especially this method will greatly reduce the calculated amount of multidisciplinary design optimization and make multidisciplinary design optimization results more robustness of flight performance.
Introduction
Control discipline is one of the most important disciplines of multidisciplinary design optimization (MDO). Since control discipline design is always based on certain objects and its design parameters, such as aircraft, which results in the control discipline could be started to design only after completed the design of other disciplines such as aerodynamics, structure, propulsion. Vehicle MDO with control discipline, therefore, is often the only single discipline optimization design under the multidisciplinary design environment, and it is difficult to synchronously optimize the control discipline and other disciplines.1–3 Although Dr Zheng Anbo et al.
4
put control disciplinary into the MDO design loop, the control disciplinary design and trajectory simulation all put the top system level and the control parameters fixed after complete design of the other disciplinaries, thus control disciplinary does not still synchronously optimize with other disciplinaries. Recently, Fan Wen-feng et al.
5
only take index of stability and maneuverability as the quantitative evaluation of MDO by the simple analysis of control disciplinary. With the continuous advance of MDO technology, more and more attentions are paid to optimize the robustness of multidisciplinary integrated design with the exception of the control discipline in order to improve this shortage. Researchers mostly focus on seeking the optimization of a design space with “flat peak.” Through improving MDO approach, it is expected to find a design space in which response values of the system performance index can be near the peak value and constitute “a flat response surface,”6,7 when the design parameters vary in a super sphere whose radius is
In order to improve the robustness of the MDO design, control discipline must be put into the design loop to carry out the synchronous design between control discipline and various disciplines of controlled objects. This is an active approach which essentially levels off the performance response surface generated in the original design space. Actually, there are a set of complete theoretical method in robust control system design for solving problems of modeling errors and runtime ambient interference. 8 In the perspective of multidisciplinary design and synthesis, the variation in design parameters excepting the control discipline can be treated as “modeling errors or uncertainty of model parameters,” whereby a set of robust control optimization propositions can be constructed, in which multidisciplinary design parameters and state feedback control parameters are regarded as optimization variables, functions, and performance constraints of aircraft. With this approach, synchronous design and optimization of the control disciplinary with other disciplines become feasible.
Since the aircraft geometric parameters, engine design parameters, and so on are time-invariant parameters, the performance index, stability, and control in the conceptual phase are always calculated by the simplified theoretical formulas, which convert the related design variables into time-invariant variables. So, the MDO problem can be described as constrained optimization problem of nonlinear static parameters. However, if aircraft control discipline is brought into the design loop, control structures and parameters would be closely related to time-variant state variables of aircraft space motion. For example, the control of pitch channel is always related to time-variant parameters such as pitching angle, pitching angular speed, and height. In addition, for a complex multidisciplinary system, the optimal design only based on the design parameters may be inexistent or just a sharp “trough (peak) point,” and the robustness of the design is very poor.2,9 So, it is necessary to introduce control discipline to widen the envelopes of optimized results. From the viewpoint of the characteristics of aircraft design, this article intends to describe the parameter variations in linear model with the direct utilization of the perturbations of various disciplinary design parameters, to propose a less conservative design method for robust controller. This can unify the optimization of controller in control discipline with the optimization of design parameters in other disciplines, so that the synchronous design optimization of control discipline and other disciplines is achieved.
The remainder of this article is organized as follows. In section “Description of MDO problem with control discipline in loop,” a basic description of MDO problem is presented. Then some basic concepts such as the design parameters, coefficient array, and state variable are described. In section “Design method of robust controller,” the reason why the new uncertain description method should be explored is discussed. And then this article proposes parameter uncertain description based on response surface approximation (RSM) and corresponding design method of linear matrix inequality (LMI) robust controller. In section “MDO approach with robust controller in design loop,” the LMI robust controller is applied to MDO design problem, and an MDO design of a tailless aircraft as example is illustrated to validate this method. Finally, conclusions are made in section “Conclusion.”
Description of MDO problem with control discipline in loop
This article considers the multidisciplinary analysis model of aircraft with control discipline in loop transformable to the following form

where
Suppose the constraint condition and objective function are represented by the following forms:
The equality constraint:
The inequality constraint:
The objective function of static parameters:
The objective function of control discipline:
The aircraft MDO is essentially to determine a set of multidisciplinary design schemes
System (1) includes not only the static design parameters
In the conceptual design phase, aiming to reduce the MDO complexity, the model described by
Design method of robust controller
Robust control is a perfect theoretical system which can solve the problems of modeling errors and disturbances of operating environment. However, in the perspective of conceptual design, the variations in static design parameters
Parameter uncertainty description based on response surface approximation
Supposing that

Schematic diagram of parameter uncertainty range.
Response surface method (RSM) has been widely used in MDO. It can conveniently establish the mathematical model of the problems influenced by multiple factors and approximate the complicated functions in relatively simple forms.14–16
Since the various design parameters generally vary in small ranges in a particular aircraft MDO scheme, it is able to divide

where
Converting formula (2) into matrix form

where

Assuming that central point of design parameter is

where
Substitute formula (4) into formula (3) to get

Normalizing

Let
Simplifying and deducing formula (5) result in

where
The uncertainty expressions of the other coefficient in linear model are solved in the similar way as above, so the uncertainty models based on the variation in design parameters can be obtained which are expressed with the normalized perturbation vector

Using formula (8), it is possible to describe the uncertainty of the gain blocks in the longitudinal or lateral linear model of aircraft, and the aircraft linear fraction transformation (LFT) model can be deduced.
Let

According to formula (9), the conclusion can be shown: in the aircraft multidisciplinary design environment, if the mapping relationship between various static design parameters
Design method of robust controller based on design parameters
Supposing that the state-space model

According to formula (9),

Let
where

Then, the uncertainty portion of

The decomposition matrices of

where
For the mentioned uncertainty system, try to find an

where
System would inevitably cause external disturbances

This convex optimization problem can be solved by LMI toolbox in MATLAB.20,21 Once
According to these, the control disciplinary analysis model of the system can be obtained which is described in formula (10): assuming a set of the central points

MDO approach with robust controller in design loop
MDO problem description based on robust control
The form of MDO description based on robust control is exactly the same as the form of MDO problem description with control discipline in design loop described previously, only the parts related to control discipline are replaced by robust controller. In order to simplify the discussion, it is assumed that the system comprises only two disciplinary models. One is SM, while the other is control disciplinary model (CM for short). Multiple disciplinary models can be processed in a similar method. Thus, the description of MDO problem is given below:
The design variables:
The objective function:
System analysis:
The limiting conditions

where
Concurrent subspace optimization approach of MDO-C problem
Now the algorithms of concurrent subspace optimization (CSO) and collaboration optimization are the two effective MDO algorithms which are widely used in the MDO. When the design parameters

Concurrent subspace optimization algorithm diagram in MDO-C.
Example
Now taking a tailless aircraft design as sample, the article introduces robust controller for the control of pitch angle, brings control discipline into the design loop, and applies CSO algorithm to realize the concurrent design and optimization of aerodynamic discipline and control discipline. MDO description of the problem is given below.
The objective function:
where
The aerodynamic disciplinary design variables
The control disciplinary design variables
The constraint conditions: apart from the constraints of basic performance, the following restrictions should be added:
Hang time: 30 min
Taper ratio:
Aspect ratio:
Mass of whole aircraft: 100 g
Engine power: 11.2 W
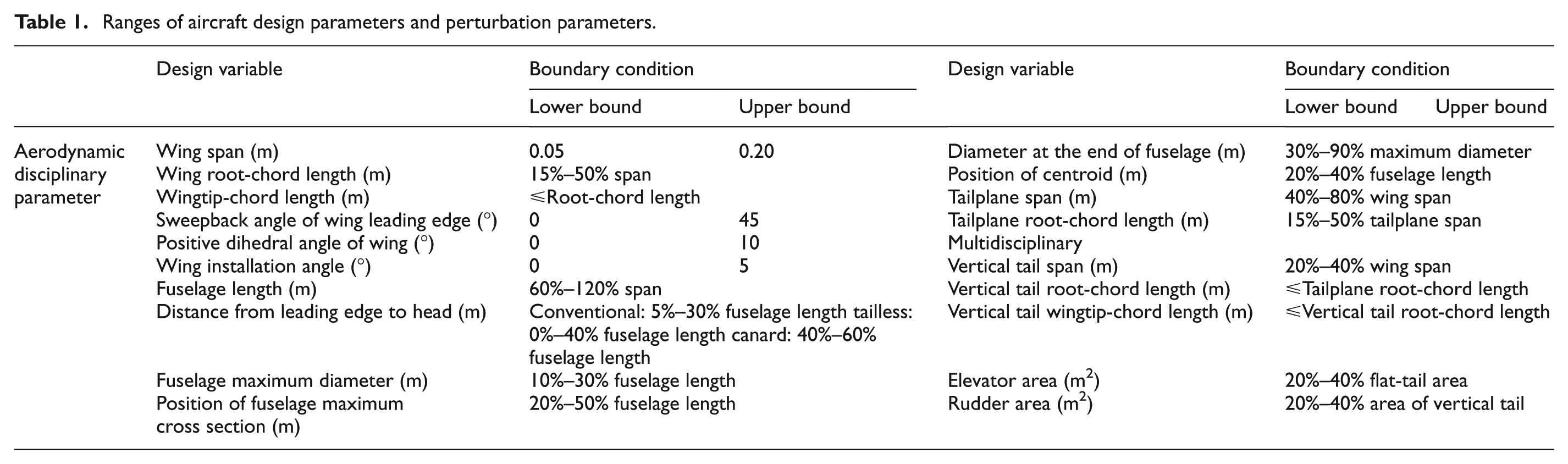
The ranges of design parameters are shown in Table 1.
Ranges of aircraft design parameters and perturbation parameters.
In this article, CSO approach is adopted in the optimization research, and the iterative process of optimization is given in Figure 3. As Figure 3 shows, the value of objective function converges after 294 times of iteration, and it has fallen into the optimizing interval after iterating almost 156 times. There is no obvious improvement for optimized values after extra 138 times of iteration. These illustrate that CSO can approach the vicinity of the optimal solution at a faster speed. Since the controllers adopted in control discipline have robustness for parameter perturbations, CSO approach needs to simply divide the variation ranges of these design parameters into several intervals and execute the system analysis in finite times, so that the calculated amount of MDO will be greatly reduced.

Iterative process of aerodynamic and control disciplinary concurrent optimization.
Finally, the optimized result of the controller is obtained as equation (18). The designed optimal controller is a two-order linear time-invariant dynamic controller, and the controller manipulates the pitch angle by elevator. In this way, the impact of external disturbances on system output can be reduced to minimum level, as

The assessment size of equivalent to be 167 mm, Compared with the MDO optimizing result which is obtained without considering control discipline in the design loop, this value increases a little. However, the design parameters in the area of performance index have robustness, and the results are more rational and effective.
The time response of total speed, flight-path angle, and pitch angular rate on ideal system, the nominal closed-loop system, and perturbed system with the variation in system parameters is shown in Figure 4. Assuming that unmanned air vehicle (UAV) straight and level fly at initial value of 11.28 m/s, the step command of total speed command signal with amplitude 12.19 m/s at t = 5 s lasts for 5 s; then at t = 10 s, the flight-path angle command signal with 5 m/s amplitude and duration of 4 s is given. The response curve is shown in Figure 4. Among them, the ideal system’s response is the step curve to satisfy the performance index requirements, and the nominal closed-loop system’s response is the real-time commands’ tracking curves with the zero disturbances of design parameters, and the disturbance system refers to the response curve with maximum uncertainty disturbance of design parameters. As shown in the figure, whether it is nominal response or disturbance response, the response curve is pretty close; they all can track speed and angle control command very well, which shows the good robust performance of the system.
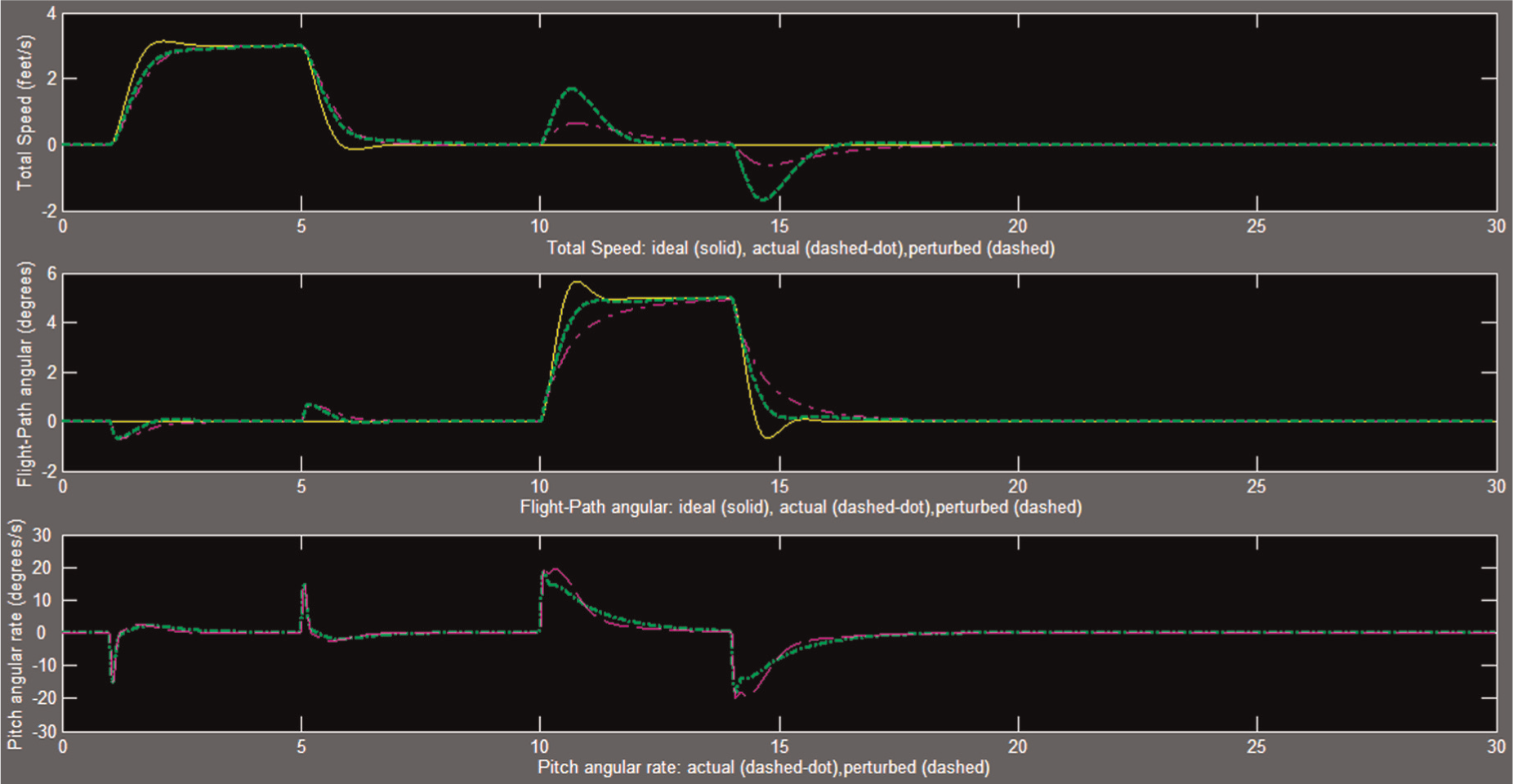
A tailless aircraft command step response curve on different system model.
Conclusion
Based on MDO approach research with control discipline in the design loop, this article proposes an effective method to design robust controller of aircraft and takes an example to validate this method. The results show that (1) considering the complexity of the mapping relationship between the coefficients in the aircraft motion model and the various design parameters, the uncertainty description based on RSM of design parameters under aircraft multidisciplinary design environment is a effective approach with less conservative; (2) the LMI-based robust controller design approach can simplify the solve complication of control law and improve the convergence rate of robust controller optimization; (3) with the employment of CSO approach, the synchronous design of aircraft MDO can be realized, and the robustness of flight performance index is strengthened. Therefore, this approach can be widely used in MDO design with control discipline in other fields.
Footnotes
Academic Editor: Jianqiao Ye
Declaration of conflicting interests
The authors declare that there is no conflict of interest.
Funding
This research was supported by the National Natural Science Foundation of China (Grant No: 61174120)