
Abstract
The study of the instantaneous frictional temperature, stress, and equivalent plastic strain generated when two surfaces are in frictional sliding process plays a significant role in understanding friction and wear mechanism. A thermomechanical coupling model between a rough body and a flat body is established. The model integrates the heat flux coupling between the sliding surfaces and considers the effects of the interaction among contact asperities and elastoplastic deformation of the rough body. The thermomechanical problem under this three-dimensional model is solved by the nonlinear finite element methods in ABAQUS software. The results show that the temperature, contact pressure, and stress are coupled. The results of the real contact area and the instantaneous frictional temperature, contact pressure, and VonMises equivalent stress on the local contact region fluctuate obviously due to the interaction among the adjacent contact asperities. The influence of asperity interaction is not constant but intermittent. Its time interval is related to the added interaction of a new adjacent contact asperity. The fluctuation of the VonMises equivalent stress makes the equivalent plastic strain of the frictional surface layer accumulate continually which might cause fatigue wear and plastic deformation wear of the material when the frictional rotating process was repeated.
Introduction
Friction and wear are fundamentally caused by force, which results in temperature rise, deformation, fatigue, adhesion, and plowing effect of material. It is well known that it will leave some traces on the contact body when the stress acts on the internal body, even though the stress is very small within the elastic limits. And it will become the source of fatigue as the traces accumulate. When two rough surfaces come in contact, the actual contact occurs only at discrete points called asperities. With only a small fraction of the available area supporting the load, the contacting asperities of the surfaces often carry very high compressive stress. The coupled thermal and mechanical behavior can be unstable leading to localized high-temperature contact regions called “hot spots” on the sliding interface. During the frictional sliding process, these local high stresses, “hot spots” and their fluctuations are the main reasons for the damage to the frictional surface. But the real-time measure of contact temperature and stress is very difficult. So, modeling the contact and sliding between rough surfaces leads to an improved understanding of friction and wear mechanisms, which are important for a wide range of applications. 1
The result showed that the effect of interference distance and the associated frictional temperature rise on pressure and VonMises equivalent stress distribution was great. 2 Ovcharenko et al. 3 developed a dynamic finite element model of a sphere impacting a layer disk to predict failures in hard disk drives. They found that the thermomechanical damage of the disk surface, that is, plastic deformation and temperature rise of the disk, was determined as a function of contact time. And then they developed a finite element model to study thermomechanical contact between a sphere and a moving flat. 4 In their study, universal solutions for the thermomechanical response were obtained as a function of the velocity of the impacting sphere. Using finite element analysis, Song et al. 5 studied the transient thermomechanical contact between a rigid sphere and elastoplastic sphere. In this model, the elastoplastic sphere was stationary while interference and tangential displacement were applied to the rigid sphere, and the radius of the rigid sphere was larger than that of the elastoplastic sphere to model flattening. Huang and Ju 6 pointed out that a two-dimensional profile could not represent real engineering surface and it was necessary to establish a three-dimensional (3D) thermomechanical coupling model for analyzing. Liu and colleagues7–9 extended the previous analysis to a 3D thermomechanical model of nonconforming contacts. But this model was a steady model of heat conduction. Ye and Komvopoulos 10 presented the finite element model of an elastoplastic medium to study the thermomechanical surface traction, while Gong and Komvopoulos11,12 studied a fully coupled finite element analysis for an elastoplastic patterned surface in contact with an elastoplastic sphere and for a semi-infinite elastic solid. Kadiric et al. 13 presented a numerical model to calculate the temperature profile, displacements, and stresses resulting from a moving band-shaped contact of a layered half-space with a homogeneous rough or smooth cylinder. In this model, steady-state heat transfer was considered and the contact was assumed to be infinitely long in the direction of cylinder axis which enabled the assumption of strain in two dimensions to be only considered. Ozera and Sofuoglu 14 performed a thermomechanical model between the rigid rough surface of a magnetic head and the smooth surface of a hard body to investigate the effects of frictional heating on the contact pressure, the normal stress, and the temperature rise as well as the strain fields.
In fact, the effect of asperity interaction on contact behavior is also important. Eid and Adams 15 studied asperity interaction effects with a simple geometry consisting of two deformable hemispheres that were in contact with a rigid flat and found that asperity interaction effects are significant. Zhao and Chang 16 applied a uniform mean contact pressure to calculate the mean of asperity heights and asperity deformation caused by adjacent contacting asperities. Iida and Ono 17 assumed that asperity contact could be treated as a point load acting on a semi-infinite elastic body, and then used a stiffness model for substrate deformation and an elastic point contact solution for asperity interactions. Ciavarella et al. 18 used the integral formulation of the original Greenwood and Williamson (GW) model to include zeroth-order asperity interactions by treating the contact pressure as uniformly distributed over the apparent contact area and the resulting deformation as uniform (in addition to the Hertzian asperity deformation). Based on the Hertzian contact solution, Yeo et al. 19 proposed an elastic rough surface contact model of an ultrathin harder film on a substrate accounting for asperity interactions to calculate the surface normal interactive and lateral friction forces. Megalingam and Mayuram 20 developed a simplified multi-asperity deformable solid model by using the generated Gaussian rough surface and a modified statistical contact model by adding a correction value to the basic statistical contact models to delineate the effect of actual summit radius and the neighboring asperities interaction on contact load and contact area. Robert et al. 1 used a semi-analytical and finite element simulation to analyze the sliding interaction between elastoplastic spherical asperities. They considered the traction force caused by sliding interaction and the interference between the asperities of different contact surfaces moving in parallel to one another. But they neglected the influence of the sliding frictional heat.
The main objective of this study is, therefore, to develop thermomechanical contact analysis between a smooth rigid flat body and a 3D body based on considering the influence of the asperity interaction, the heat flux coupling, and elastoplastic deformation of the rough body.
Model
Rough body and frictional pair model
As many engineering surfaces possess fractal characteristics, the rough surface used in this article is generated based on the two-variable Weierstrass–Mandelbrot (W-M) function.21,22Figure 1 shows a solid model with a W-M fractal rough surface. In order to simplify calculation and understand the effect of asperity interaction on the temperature and stress, a thermomechanical analysis is presented for a flat body rotating against a rough body which is part of the solid shown in Figure 1; the model is shown in Figure 2.

A solid model with a fractal rough surface.

The rotating contact model.
In Figure 2, r1 and r3 are the inner radii of the rough body A and the flat body S, respectively, and r2 and r4 are the outer radii of body A and body S, respectively. Z2 is the thickness of body S. Z1 is the whole thickness of body A and body S. S1 is the friction surface of body S; S2 is the back surface of the frictional surface of body S; S3 is the external rim surface of body S; S4 is the internal rim surface of body S; A1 is the frictional rough surface of body A; A2 is the side surface of body A; A3 is the back surface of the frictional surface of body A; and θ is the coverage angle of body A.
Frictional heat flux coupling and thermomechanical coupling
Because the amount of heat generation by wear is very small relative to the heat generated by friction, the effect of material wear is neglected. Thus, the frictional heat flux q(x,y,t) can be figured out as

where p(x,y,t) is the interface contact pressure between the rough body A and the flat body S which can be obtained by solving the thermomechanical coupling problem; μ is the coefficient of friction; v(x,y,t) is the relative sliding velocity.
To solve the frictional heat flux coupling, it is assumed that on the contact region, the local instantaneous temperatures of body A (TA) and body S (TS) are equal and the local contact interface is an ideal plane. So, the partition of frictional heat flux on the local contact region between body A and body S is assigned naturally according to the thermophysical properties of material. This coupling condition on the local contact region can be written as

where qA is the heat flux entering into body A from the local contact region and qS is the heat flux entering into body S from the local contact region.
The coupling between the temperature field and the stress field is completed via frictional heat flux q(x,y,t). From the contact pressure between body A and body S, it leads to the frictional heat flux described by a relative sliding velocity and the contact pressure with a dynamic frictional coefficient (equation (1)). With the varying heat flux entering into the sliding bodies, the temperature of the sliding bodies changes and leads to thermal deformation. The resulting thermal deformation changes the stress distribution and the subsequent contact pressure distribution. The resulting varying contact pressure further affects the frictional heat flux.
The thermal boundary conditions
The surface S1 of body S is partially in contact with the rough surface A1 of body A. So, the thermal boundary conditions of the two surfaces (S1 and A1) are as follows: in the local contacting region, there is frictional heat flux generation. But outside the local contact region, the local surface is subjected to the thermal radiation and forced convection condition. Thus, the boundary conditions can be expressed as

where

and where k is the thermal conductivity, Tf is the environmental temperature, hi1 is the convection coefficient, qi is the heat flux entering into body S or A from the local contact region and can be obtain from the heat flux coupling condition, σ′ is the Stefan–Boltzmann constant, and
According to the assumption of the frictional heat flux coupling, equation (3) can be rewritten as

In the above equation (4), the heat source is moving and the thermal flow is coupled. This is expressed as the contact function g(m). When g(m) is 0, it indicates that there exists thermal convection and thermal radiation outside the local contact region. When g(m) is equal to 1, it indicates that there exists heat flux entering into body S and body A in the local contact region.
Considered that the rotation time is very short and the thermal conductivity of body A is very small, it is assumed that the surface (A2) of body A is adiabatic. This can be written as

where
There is thermal convection on the surfaces (S4, S3, and S2). These can be expressed as

where hSi is the convective coefficient.
The thermal initial condition is as follows

where T0 is the initial temperature of body S and body A.
The structural boundary conditions
The structural boundary conditions are investigated as follows. Assume that the pressure Pz exerted uniformly on the back surface (A3) of body A along the z direction. Because body A is immobile, it is hence assumed that the displacement along the x and y directions is equal to 0 on the backside surface (A3) of body A. The internal rim surface (S4) of body S is stationary in the z-axle direction and applied certain angular velocity (ω0) along the z-axle and clockwise directions. And the surface (S2) of body S is immobile in the z-axle direction. So, the structural boundary conditions can then be described as

The thermomechanical analysis of an elastoplastic rough body during the process of frictional rotation is developed by writing a subroutine and using the nonlinear finite element multiphysical methods in ABAQUS software.
Analysis of example
Parameter
1. Parameter of the material properties and simulation. The material of body S is CA-15, and the material of body A is resin-bonded composite frictional material. In the analysis, we use a set of available data in Gao et al. 23 and Huang and Gao. 24 The parameters of the material properties of body S and body A are given in Table 1. From Table 1, it can be seen that the elastic modulus of body S is very large compared with body A, so body S is assumed as a rigid body, but the elastoplastic deformation of body A is considered. The yield strength of body A is equal to 25 MPa. The structural parameters of the model are given in Table 2.
Material properties for the transient thermal analysis.

The structural parameters of the rotating contact model.

To generate the rough profile of body A, the fractal parameters (D and G) are assigned as 2.5 and 3.0 μm, respectively, and the density of frequencies in the surface profile (γ) is 1.5. 22
Figure 3 shows the applied external pressure versus the rotating time. The applied external pressure (Pz) exerted on the surface (A2) of body A increases linearly from 0 to 3 MPa during the rotating time of

Applied pressure versus rotating time.
Analysis and discussion
For convenience, to explain this problem, we take the relatively higher asperities of the rough surface which are in contact with body S at the rotating time

The contact region distribution of the rough surface.
Rough surface temperature field
The temperature field of body A on the rough surface in the different rotating time is shown in Figure 5. It can be seen that the temperature distribution of the rough surface is uneven, and the high temperature is located at the real contact region. This is because the contact asperities are ragged and have various kinds of forms; the loads and the linear velocities of the rotation at different contact points are diverse from each other. All these lead to the difference of the contact area, the contact pressure, and the frictional heat flux on the different contact region.

The contact temperature distribution of the rough surface at different rotating time (units: °C): (a) t = 320 μs, (b) t = 330 μs,(c) t = 410 μs,(d) t = 600 μs,(e) t = 1250 μs,(f) t = 1600 μs,(g) t = 1660 μs,(h) t = 2500 μs.
Because the thermal conductivity coefficient of body A is small and the contact body needed time to transmit the heat, before the rotating time
Thermomechanical coupling analysis
Figures 6–8 show the instantaneous temperature, contact pressure, and VonMises equivalent stress of different contact nodes versus the rotating time, respectively. In the figures, A2301, B2807, C2951, D2494, E2776, F2596, and G3002 stand for the contact asperities A, B, C, D, E, F and G as shown in Figure 4, respectively.

The contact temperature versus rotating time at different contact points.
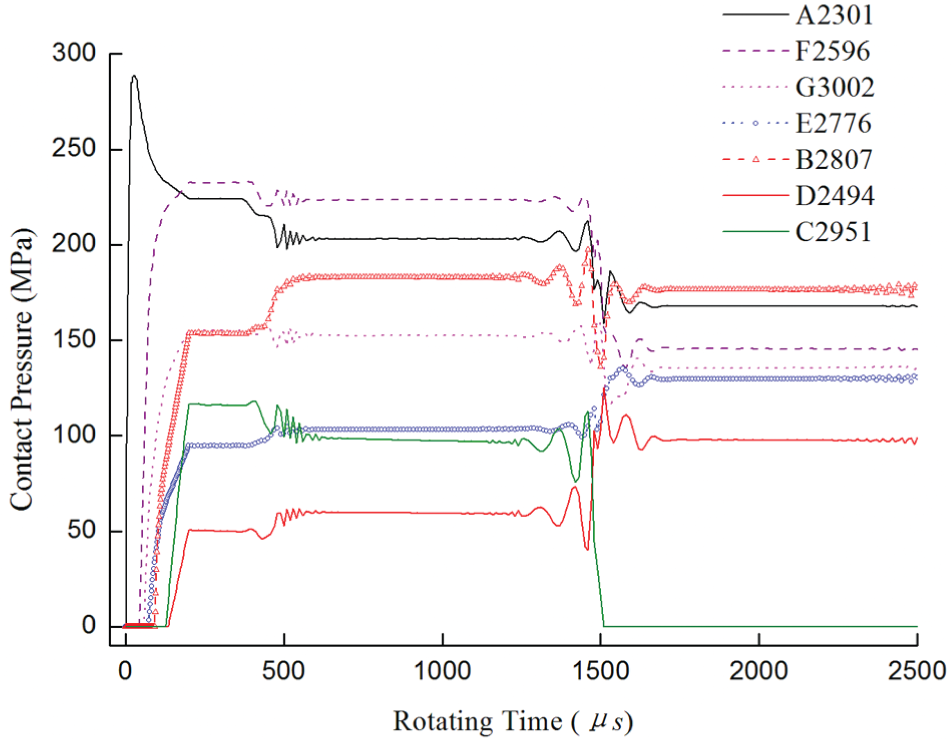
The contact pressure versus rotating time at different contact points.

The VonMises equivalent stress versus rotating time at different contact points.
From Figures 6–8, it can be seen that the instantaneous contact temperature, contact pressure, and stress are coupled. The instantaneous contact temperature, contact pressure, and stress of each contact asperity increase quickly when the contact asperity comes into contact and then vary slowly during the constant rotating process. But during the period of time from
In the stage of loading and rotating (
In the stage of rotating after loading (
Influence of adjacent contact asperity
Figure 9 shows the contact area ratio (the ratio between the real contact area (Ar) and the nominal area (A0)) versus the rotating time. One can see that during the loading and rotating process (

The dimensionless contact area (Ar/A0) versus the rotating time.
Because the contact asperities of F2596, G3002, E2776, and D7308 are close, these adjacent contact asperities will interact with each other in adequate time and make the contact area and the instantaneous temperature, contact pressure, and VonMises equivalent stress of each contact point fluctuate apparently in the time of about
When
During the period of time from
From Figures 6 and 7, we can find that the instantaneous temperature and contact pressure of the contact asperities A2301 and B2807 change correspondingly although they are far away from the adjacent contact asperities. The contact pressure and instantaneous temperature of the highest contact asperity A2301 are high at the initial rotating moment and then decrease due to the thermal expansion on the local contact region and the lower linear velocity of the rotation. But the linear velocity of the rotation of the contact asperity B2807 is higher than that of the contact asperity A2301, and the contact asperity B2807 is a back contact point relative to the rotation direction of body S. All these make the instantaneous temperature of contact node B2807 increase more than that of other contact nodes and then become the highest temperature on the frictional contact interface. Literature 25 pointed out that the maximum temperature rising general was located on the end part relative to the rotation direction, owing to continual accumulation of frictional heat, and lied on the higher asperity whether it was elastic or elastoplastic situation.
From Figures 5(f)–(h) and 6, one can find that the instantaneous temperature of the contact asperity C2951 changes from 150°C to 25°C due to the interactions of the contact asperities. That is because the thermal expansion of these contact asperities, especially the contact asperities D2494, E2776, F2596, and G3002, makes the position higher than that of the adjacent contact asperity C2951 of which the position is relatively low. The asperity C2951 withdraws the contact from the original contact state (Figure 5(h)), the contact pressure continually falls to 0 (Figure 7), and the frictional heat flux input also declines to 0 correspondingly. Under the thermal conduction of the material and the heat interchange for air convection, the temperature of this local contact node decreases.
From above, we can see that the effect of the interaction among the adjacent contact asperities on the instantaneous temperature, contact pressure, contact area, stress, and equivalent plastic strain is obvious and has time interval. This interval is dependent on the work of the adjacent contact asperities from independence to interaction.
Equivalent plastic strain
The variation of the equivalent plastic strain of different contact points versus the rotation time is presented in Figure 10. It indicates that the equivalent plastic strain of each contact point increases with the increase in the applied normal load and then almost remains constant due to the constant load and angular velocity. But during the period of time from

The equivalent plastic strain versus rotating time at different contact points.
As the rotation continues, the asperities on the contact surface will repeatedly contact under the applied load, and more and more adjacent contact asperities become interactive with each other. The asperity interaction will make the contact area, contact pressure, temperature, stress, and equivalent plastic strain fluctuate apparently and then tend to be temporarily stable. The fluctuation and the temporary stability repeat again and again as the frictional sliding time goes on. These will make the equivalent plastic strain of the frictional surface layer on the real microcontact region increase continually. The accumulating plastic strain and the fluctuating stress will cause fatigue wear and plastic deformation wear of the material. The metallographic photo in the literature 26 presented a dropping-off chip after multiple plastic deformations. And the evidence described that the accumulated plastic deformation on the microcontact region would cause wear of the material finally.
Conclusion
In this article, the 3D rotating contact model between an elastoplastic rough body and a rigid flat body was developed and applied to analyze the thermomechanical coupling and the effect of the interaction among the adjacent contact asperities. The frictional heat flux coupling on the contact region between body S and A was investigated.
The analysis and simulation identified that the instantaneous contact temperature, contact pressure, and stress of the contact asperities were coupled and increased quickly when the asperities come into contact and then varied slowly during the constant rotating process. While the interaction of adjacent contact asperities enhanced due to the heat conduction, the contact temperature would change obviously. The varying contact temperature further affected the contact pressure and the VonMises equivalent stress. The influence of the interaction among the adjacent contact asperities was not monotonous but intermittent. Its time interval was related to the added interaction of a new adjacent asperity. Variables such as the temperature, contact pressure, and VonMises equivalent stress on the local contact region fluctuated apparently and then tended to be temporarily stable until a new contacted asperity comes into interaction. The fluctuation of the VonMises equivalent stress made the equivalent plastic strain of the frictional surface layer on the real microcontact region increase continually. The accumulating plastic strain and the fluctuating stress might cause fatigue wear and plastic deformation wear of the material when the frictional rotating process was repeated.
Footnotes
Academic Editor: Professor Yunn-Lin Hwang
Declaration of conflicting interests
The authors declare that there is no conflict of interest.
Funding
This research is supported by the National Natural Science Foundation of China (NSFC) under grant nos 51175085 and 51205062.