
Abstract
Based on the general model of design optimization of multibody dynamics, a modified genetic algorithm with adaptive crossover and mutation rates is developed to find optimal design variables which satisfy the dynamic constraints and obtain optimum objective values. Generalized-α projection method and higher order variational integrators with Lagrangian polynomial and Gauss quadrature formula are used to solve differential–algebraic equations during optimization process. Efficiency and accuracy of the numerical results obtained by intelligent design optimization with different differential–algebraic equation solving methods are compared.
Keywords
Introduction
Design optimization of multibody dynamics is a complex problem because of the strong nonlinear mapping between objective functions and design variables, which are combined through dynamic equations of multibody systems. Most design optimization methods used the derivatives of the objective function with regard to the design variables, which are called sensitivity. Given an initial values of design parameters, sensitivities can be used to reduce or increase the value of the objective function in the optimization process. For example, João and Corrêa 1 present a sequential approximate optimization approach with the first-order sensitivity analysis. Ding and Pan 2 develop the augmented Lagrange method (ALM) with the first-order sensitivity analysis and the second-order sensitivity analysis. But for complex multibody systems, with large number of state variables and design variables, sensitivity analysis is complex and time-consuming, leading to a long optimization process.
The appearance of intelligent search methods, such as the genetic algorithm (GA), the particle swarm optimization (PSO), and the ant colony optimization (ACO), brought new design optimization methods for multibody system dynamics. Without sensitivities, the best design parameters are chosen from populations of individuals through a series of designed random process. Because of no sensitivity analyzing, time complexity of optimization reduced. For the GA, Etman et al. 3 present a methodology, which uses simplified one-dimensional (1D) and two-dimensional (2D) models of the structures, in association with several genetic and classical optimization algorithms, for the multi-objective optimization of general structures, with application to railroad vehicles. Haddadpour et al. 4 used three constrained and two unconstrained optimization methods along with the GA to minimize the total potential energy of the system. Ding and Pan 5 present a GA with the gradient modified selection operator to optimize the performance of a commutator motor. Ding et al. 6 employed the GA to optimize the masses of the balancing disks and their lead angles with an objective of minimizing the engine mount displacements.
Although GA is more efficient than gradient-based optimization approach, it is still difficult to balance the solution quality and computation time. There are many modified algorithms based on GA to improve the efficiency of optimization algorithms; Kusztelak and Rudnicki 7 proposed a modified GA in which the operating domain is defined and changed to be around the optimal point in its evolutionary processes to improve the convergence speed and accuracy. Liu and Wang 8 carry out a new operator, cutting operator, depending on the rules of credibility judgment and adjust the mutation rate by population fitness average to make the encoding gene-string evolve adaptively in the GA.
However, there is another important part in design optimization process of multibody system dynamics. That is the solution of the dynamic equations, which are often differential–algebraic equations (DAEs) that need special numerical algorithm to solve. The accuracy and efficiency of the solving algorithm affect the accuracy of the optimal results and the efficiency of the optimization method. Ramachandran and Padmanaban 9 used generalized-α method and generalized-α projection (generalized-α-P) method to solve DAEs and then used ALM and unconstrained methods based on second-order sensitivity in the design optimization. Wen et al. 10 presented the higher order variational Galerkin integrators for multibody system dynamics with constraints by using Lagrangian polynomial to interpolate state variables and Gauss quadrature formula to approximate Hamiltonian action integral.
In this article, a modified GA with additional parameters is used to find optimal design variables which satisfy the dynamic constraints and obtain optimum objective values for the general model of design optimization of multibody dynamics. Generalized-α-P method and higher order variational integrators with Lagrangian polynomial and Gauss quadrature formula, which are developed by the authors, are used to solve DAEs during optimization process. Efficiency and accuracy of the numerical results obtained by intelligent design optimization with different DAE solving methods are compared through a slider-crank mechanism.
General model of design optimization
Design optimization of multibody system dynamics can be usually described as a constrained optimization problem by the following general form

where the objective function
The generalized coordinates

where
It is presumed that the start time t1 and the end time t2 of the multibody system which depend on design parameters

which satisfies
A complete characterization of the motion of the system requires definition of initial conditions on position

where the matrices
Using penalty function method or ALM, constrained problem (1) can be changed to unconstrained problem, which can be solved by gradient-based optimization methods or intelligent search methods. Intelligent search methods without sensitivities can also solve the constrained problem (1) directly by handling the constraints during the intelligent process. Here, the GA for constrained design optimization of multibody system dynamics is discussed using DAE integrators.
GA using DAE integrators
In a GA, a population of candidate solutions called individuals to an optimization problem is evolved toward better solutions. Each candidate solution has a set of properties which can be mutated and altered. The general procedure of GA includes initialization, fitness, and evolution, including selection, crossover, and mutation. Algorithmically, GA using DAE integrators is outlined in the following.
Initialization
For the design variable
Fitness
For the feasible design variable

where C is a given positive constant and F(
To obtain the fitness function F(
Generalized-α-P method
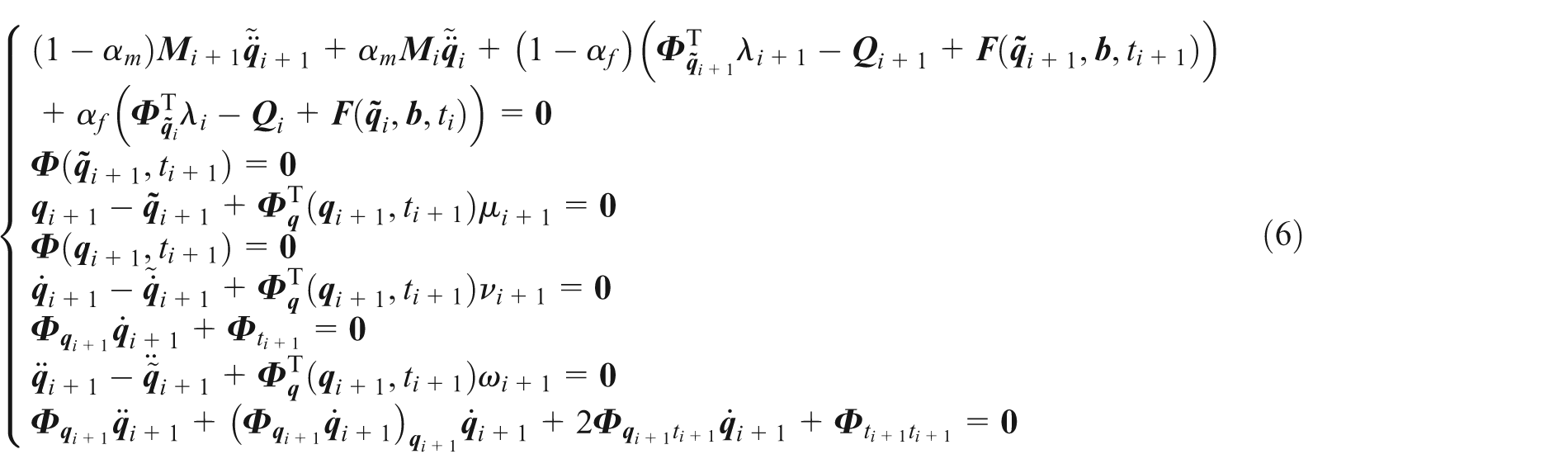
Combining generalized-α method and projection method, the generalized-α-P method is obtained as follows, which can keep the constraints, velocity constraints, and acceleration constraints in higher accuracy at the same time
where

and

Higher order variational integrators
Using Lagrange interpolation with s + 1 control points and Gauss quadrature formula with n quadrature points, the higher order variational integrators are as follows

where


Then, use the obtained variables
Evolution
During the evolution iterations, a new population can be created by repeating selection, crossover, and mutation. The GA’s performance is largely influenced by crossover and mutation operators. Here, adaptive crossover and mutation rates are presented to improve the efficiency of GA. Furthermore, the chromosomes with larger fitness called elitist are only mutated with adaptive smaller mutation rate but not crossed to guarantee that the best fitness function value in each generation never becomes worse.
Selection
Select chromosome by roulette wheel from a population according to the fitness. Better the fitness, the bigger the chance to be selected to be the parent. Choose the best individual into the new population without crossover and mutation.
Crossover
Select two individuals randomly, and cross over them with a crossover probability at random crossover site to form a new offspring. In simple GA, the crossover rate is chose to be constant with the suggested value of 0.75–0.95. But adaptive crossover rate is more suitable according to the fittest establishment. Here, an adaptive crosser rate in the following is developed to obtain the higher rate at the beginning of the evolution and the lower rate at the end

where x is the current number of iterations and n is the total number of iterations.
Mutation
With a mutation probability, generate a random real number to determine whether the individual need to be mutated. Mutate 1 to 0 or 0 to 1 at each locus.
In simple GA, the mutation rate is chose to be constant. Here, an adaptive mutation rate in the following is developed to obtain the lower rate for the elitists and the higher rate for the others

where Fi is the fitness of the ith individual,
Numerical example
Figure 1 shows a slider-crank mechanism in its initial position. The loading in this case is only the weight of the members. The state variables and the design variables are presumed to be

Slider-crank mechanism.
The objective function is to minimize the distance between points (xp, yp) and (
Using the modified GA, the results based on generalized-α-P method and higher order variational integrators with two-order Lagrangian polynomial and two-point Gauss quadrature formula (P2L-Q2G) are compared with the four-order Runge–Kutta method in Table 1. Here, the terminal time is 1 s, and the time step h = 0.05. The average values are of 10 times optimization because random numbers in the optimization process make it not comparable among single different methods. It shows that among those three methods, higher order variational integrator method is fastest and most accurate.
Result comparison of the methods with h = 0.05.

DAE: differential–algebraic equation; generalized-α-P: generalized-α projection.
Tables 2 and 3 show the average and best results, respectively, with the time step h = 0.01. Because of the increase in the number of objective points, the optimal displacement of the join point P has to close more given points as much as possible. So, it takes longer time and more iteration to reach a desirable objective value.
Average result comparison of the methods with h = 0.01.

DAE: differential–algebraic equation; generalized-α-P: generalized-α projection.
Best result comparison of the methods with h = 0.01.

DAE: differential–algebraic equation; generalized-α-P: generalized-α projection.
The errors in Tables 2 and 3 show that the distance between given point (
Figures 2
–4 show the trajectory of point P determined by the optimal parameters using the above-mentioned three different methods. Here, the terminal time is 2 s, and the time step h = 0.01, which is to make the compare more clear. The red slider-crank is the mechanism at the start time, the green slider-crank is the mechanism at the middle time, and the blue slider-crank is the mechanism at the end time. The violet line is the trajectory of given (

Trajectory of point P with Runge–Kutta method.

Trajectory of point P with generalized-α-P method.

Trajectory of point P with higher order variational integrators.

Zoom in trajectory of point P with different methods.
Conclusion
GA using the generalized-α-P method and higher order variational integrators for DAEs is discussed in this article. For the general unconstrained optimization problem with ALM, a modified GA with adaptive crossover and mutation rates is developed for design optimization of multibody system dynamics. Numerical results show that the presented modified GA is efficient. The generalized-α-P method can retain the similar objective values with different time steps, while the higher order variational integrators with Lagrangian polynomial and Gauss quadrature formula can obtain more accurate design variables. Further research on other intelligent optimization approaches for multibody system dynamics is needed. Comparison and analysis between sensitivity-based and intelligent optimization methods are also needed for further study.
Footnotes
Academic Editor: Chuanzeng Zhang
Declaration of conflicting interests
The author declares that there is no conflict of interests regarding the publication of this article.
Funding
This research was supported by the National Natural Science Foundation of China (grant nos 11002075, 11272166, 11472143, 11472144).