
Abstract
The Euler–Poinaré principle is a reduced Hamilton’s principle under Lie group framework. In this article, it is applied to derive a hybrid set of dynamical equations of rigid multibody systems, which include four parts: the classical Euler–Lagrange equations of rigid bodies in their translational coordinates of mass center; Euler–Poinaré equations via orientation matrices and their related angular velocities; the constraint equations due to different joints in Cartesian coordinates and Lie groups; and the reconstruction equations between special orthogonal groups and their Lie algebras. The generalized mass matrices of dynamical equations are constant, which is computationally efficient. All the equations can be constructed systematically and can be solved easily. The construction equations can be used to design Lie group integrators of multibody system dynamics. The procedure presented in this article can be extended easily to flexible multibody systems, systems with non-holonomic constraints, and so on.
Keywords
Introduction
Multibody systems are mechanical systems that include interconnected bodies through different joints driven by some types of forces; their dynamical equations are usually denoted by nonlinear highly coupled ordinary differential equations or differential/algebraic equations, which must be solved numerically. The computational efficiency and stability of these dynamical equations depend strongly on the configuration description of multibody systems1–9 and especially on the expressions of the orientations of bodies.
The classical Euler angles are usually used to describe the rotations of bodies in multibody systems, 1 but the resulting dynamical equations of motion are nonlinear inertia coupled with singular problems. If the Euler angles are replaced by the Euler parameters,2–6 the singular problems can be overcome. However, the nonlinear inertia coupling still exists. In addition, we must introduce new constraints in order to satisfy the definition of Euler parameters. If the three directors from direction cosine matrix of every body are used to express the orientation, 10 the generalized mass matrices of the dynamical equations are constant, which contributes to high computational efficiency, but six new constraint equations must be introduced for each body which enlarges the computational scales. If we use the orientation matrices as special orthogonal groups to describe the rotations,11–14 the motions of bodies in multibody systems can be directly denoted by the Lie groups and their corresponding Lie algebras. Meanwhile, we do not need any additional constraints for the rotation description. Noticeably, the resulting generalized mass matrices are constant. This Lie group modeling method has become one of foundations for structure-preserving algorithms.
Technically, different descriptions of system configuration lead to different types of dynamical equations even though we use same modeling principle. In vectorized parameterization space, the Euler–Lagrange equations or Hamilton’s equations of multibody system dynamics can be derived under the Hamilton’s principle. While under the framework of Lie group and Lie algebra, these equations are the reduced Euler–Poinaré and Lie–Poisson equations.15–17 By making use of the integrators of Lie group,18–21 the Euler–Poinaré and Lie–Poisson equations can be easily applied to design the structure-preserving integrators of Lie group. These integrators have been implemented for long-term simulation of free rigid body as well as full rigid body. 22 Additionally, by combining Lie group methods and the variational principle of discrete mechanics,23,24 Lee et al. 25 and Bou-Rabee and Marsden 26 proposed the more stable algorithms of symplecticity–momentum–energy-Lie group preserving. Mizzi, 27 Liu, 28 and Boyer and Primault 29 used Lie group methods to construct equations for the motion of multibody systems. Unfortunately, the motions of rotation are parameterized finally. Park and Chung, 30 Brüls et al., 31 and Sonneville and Brüls32,33 focused on Lie group integrators of multibody system dynamics, but they did not present the systematic derivations of dynamic equations under Lie group framework. In this article, based on Euler–Poinaré theory, we focus on how to derive the dynamical equations of rigid multibody systems by using Lie group and Lie algebra expressions of rotations.
The rest of this article is as follows. The classic Euler–Poinaré equations of free rigid body are introduced in section “The classical Euler–Poinaré equations of a rigid body.” In section “The Euler–Poinaré equations of rigid multibody system dynamics,” we derive the Euler–Poinaré equations of rigid multibody systems with joint constraints. In section “Generalized external forces in Lie groups and Lie algebras,” we analyze some generalized external forces under Lie group and Lie algebra. Section “Examples” presents two examples using the proposed method. In the last section, the contributions of this article are summarized and some future research topics are also presented.
The classical Euler–Poinaré equations of a rigid body
Lie group is a smooth differentiable manifold on which composition operations such as matrix product can be defined. The Euler–Poinaré principle is based on matrix Lie group. If Lie group


where

where

where
which is the reduced Euler–Poinaré principle, and its classic Euler–Poinaré equation reads

where

For a free rigid body, its orientation matrix can be selected as the special orthogonal group, that is,



So, we can rewrite equations (6) and (7) as follows


The equivalent vector form of equation (10) is

Based on equation (13), we rewrite the Euler–Poinaré principle (5) using vector expression as follows
The corresponding Euler–Poinaré equation of a free rigid body is in the following vector form

The Lagrangian of a free rigid body is

Thus, equation (15) can be transformed into the following classical Euler equation of rotation

The Euler–Poinaré equations of rigid multibody system dynamics
A typical multibody system is depicted in Figure 1, which contains

where

where

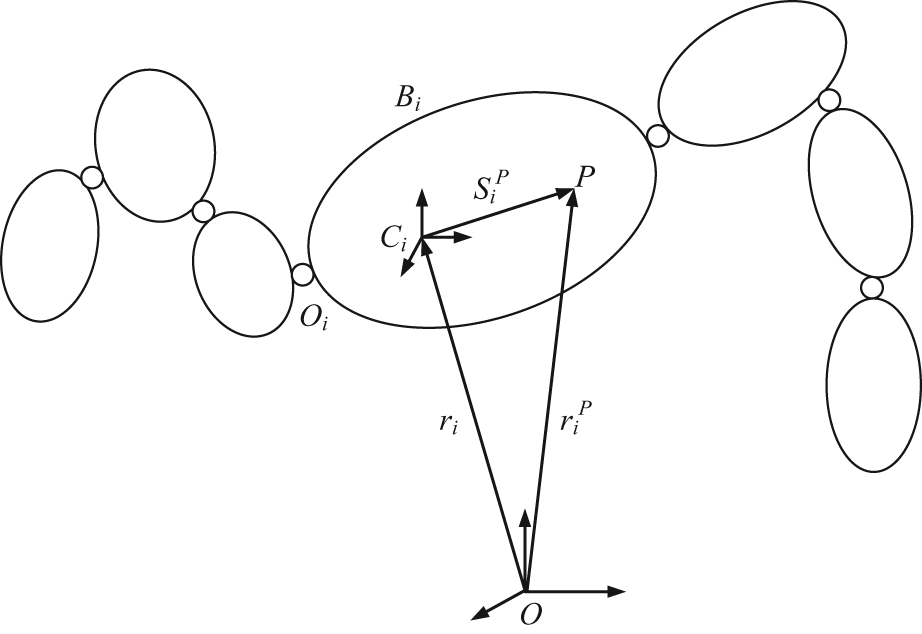
A typical multibody system.
The kinetic energy of

where

where

Equation (21) can be rewritten using angular velocity as

or

Here, we assume that the potential energy of the system is the following form

and express the holonomic constraints of the system in the following compact form
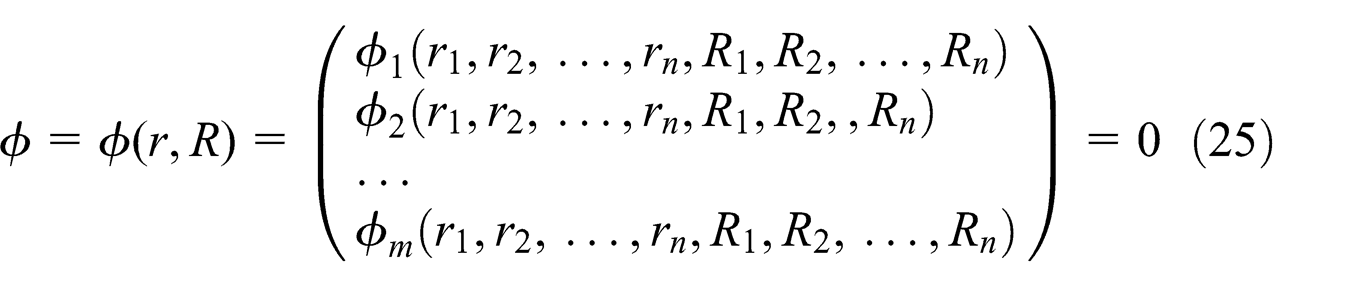
where
Next, we separately denote the translation velocities, angular velocities, and their skew-symmetric matrices as

where

According to equation (10), equation (27) can be manipulated further as

For any two matrices



where

As

Because

For any vectors

where

Based on the identity
So, we have


Compared with equation (31.3), we can obtain


where

and its corresponding skew-symmetric matrix is

Substituting equations (31.3) and (31.9) into equation (28), we obtain
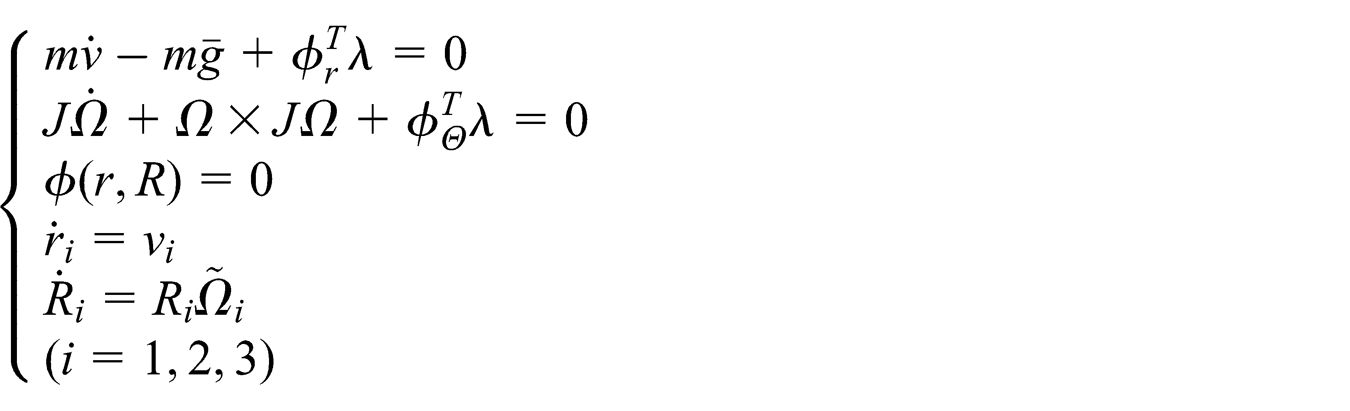
where the dynamical equations of multibody systems can be derived as

where the first equation is the traditional Euler–Lagrange equation on translational motion of mass center. The second one is the Euler–Poinaré equation on rotational motion of every body. The third one is constraint equation. Note that the last two equations are reconstruction equations.
By using equation (13), we can rewrite the first two equations of equation (33) as the following vector form


For rigid bodies, we have

With equation (35), equation (34.2) can be rewritten as the following simple form

The constraints for the interconnected bodies are important features of multimode systems. In this section, we employ the method proposed in Haug5,6 to construct constraint library for the multibody systems according to the definition of basic constraints. The constraint equations can be expressed as the following general form

Its variations, first-order derivatives, and second order-derivatives are, respectively



For the velocity level constraint equation (37.3), we present its derivation in detail as follows

Generalized external forces in Lie groups and Lie algebras
In this section, we focus on some conservative external forces, such as gravity, elastic force due to linear translational and twisted springs. The corresponding generalized forces are minus derivatives of energy with respect to quasi-coordinates.
For the generalized external forces due to gravity, we let



Equations (38.1), (38.2), and (38.3) are potential energy of every body, its variation, and partial derivative with quasi-coordinates, respectively.
By taking account into the linear translational spring between point


where the variation in

According to equation (39.3), we have
From equation (39.2), we can derive the derivatives of energy with respect to quasi-coordinates as follows

For a twisted spring between


where




One can obtain


Finally, the partial derivatives of energy with respect to quasi-coordinates are written as follows
Examples
A heavy top
For a heavy top presented in Figure 2, we set up its body-fixed frame according to section “The Euler–Poinaré equations of rigid multibody system dynamics.” Its kinetic energy and potential energy are, respectively


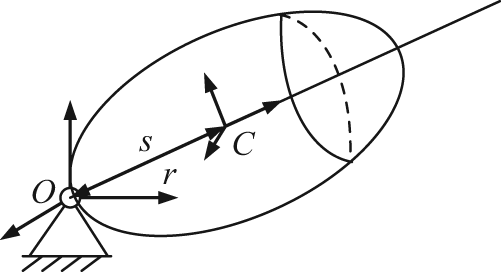
Heavy top.
The constraint equation at joint O and its variation are, respectively


where

A spatial pendulum with three rigid bodies
A spatial pendulum shown in Figure 3 consists of three bodies interconnected through three spherical joints. The kinetic energy, potential energy, constraint equations, and their variations are, respectively





A spatial pendulum.
The dynamic equations of the system are derived as follows according to the results in section “The Euler–Poinaré equations of rigid multibody system dynamics”
Obviously, numerical methods of differential/algebraic equations in Lie group appearing in this article will be a new research subject in multibody system dynamics, which are not discussed here due to scope of this research. Please refer to Uhlar and Betsch, 10 Brüls et al., 11 Brüls and Cardona, 12 Celledoni et al., 13 Celledoni and Owren, 14 and Müller and Terze 34 for some new developments on this topic.
Conclusion
A new type of dynamical equations of rigid multibody systems is derived using Euler–Poinaré principle. The results include four typical equations: the Euler–Lagrange equations with constraints on translations of mass centers; the Euler–Poinaré equations with constraints on rotations of every body; the reconstruction equations used to recover the orientation matrices from Lie algebras; and the constraint equations describing inter-connections of bodies. All these equations have simple forms which are easy for numerical implementation. The inertia matrices are constant, leading to high computational efficiency. In addition, the Lie group structure-preserving algorithms can be developed from the Lie group integrators, which is very important for long-term simulations of multibody systems.
This work can be extended to other new researches naturally, including the following: (1) the discrete Euler–Poinaré equations and Lie–Poisson equations of multibody systems based on the variational principles for discrete mechanics; (2) continuous and discrete Euler–Poinaré equations and Lie–Poisson equations of flexible multibody systems; and (3) Lie group variational integrators of multibody systems and their applications in the field of control and optimization and so forth.
Footnotes
Academic Editor: Chuanzeng Zhang
Declaration of conflicting interests
The authors declare that there is no conflict of interest.
Funding
This research was supported by the Natural Science Foundation of China (Grant Nos 11472144, 11002075, 11272166, 11472143).