
Abstract
To improve the operating characteristics of disconnector, a limited rotating angle permanent magnet motor actuator is presented in this article. The mathematical relationship between the moving contact stroke and rotation angle of motor is obtained by analyzing the dynamical coordination characteristics of motor actuator used in 550 kV gas-insulated switchgear disconnector. The electromagnetic field equation of motor, motive equation of rotor, and circuit equation of winding are solved simultaneously for acquiring dynamical characteristics of motor. The electromagnetic-mechanical coupled calculating model of motor is established by finite element method, and magnetic saturation of stator tooth is calculated and analyzed. According to the operating principle of motor, the double-closed control system which collects the motor speed and contact stroke signal during the operation of disconnector is developed. The experimental results show that the opening and closing speeds of disconnector are 1.1 and 1.2 m/s, respectively, which meet design requirements. The speed-regulating operation of disconnector is also carried out so that the switching speed of disconnector can adjust by motor actuator and control system.
Keywords
Introduction
Very fast transient overvoltage (VFTO) with steep wave-front and high amplitude is generated during switching of disconnector in gas-insulated switchgear (GIS) with no-load short bus bar. This transient voltage causes high threat on the insulation of GIS and electronic devices connected to GIS enclosure.1–4 One of the important influential factors of VFTO is the switching speed of the disconnector. The research on suppressing VFTO by adjusting switching speed is carried out, and there are still different opinions on this factor. Szewczyk et al. presented this opinion that increasing the switching speed of the disconnector can shorten the operation time and decrease the number of strikes during the operation. Thus, the probability of VFTO is decreased. But Yinbiao et al. presented the opinion that decreasing the switching speed can decrease the trapped charge voltage and reduce the amplitude of VFTO.5–7
The switching speed of the disconnector mainly depends on the performance of its actuator. So far, the actuator of GIS disconnector mainly included spring mechanism, hydraulic mechanism, and electromagnetic mechanism. A new type actuator of disconnector is presented, where the spring is used as an energy-storage element to provide driving force during opening and closing operation of the disconnector, and it also simplifies the switching procedure of the disconnector. 8 The dynamic simulation and mechanical experiment are carried out for researching electric actuator which applies to 252–1100 kV GIS disconnector and earthing switch. 9 In order to further achieve intelligent operation of disconnector, the investigation on the possibility of varying speed operation was performed, and the actuator that can switch with different speeds is developed, but those speeds call for setting forehand. 10 The above actuators are not able to adjust the switching speed in real time during opening and closing operation of the disconnector; therefore, the technological development of suppressing VFTO by adjusting switching speed is limited largely.
A novel permanent magnet (PM) motor as actuator of disconnector is presented in this article. First, the analysis of dynamical coordination characteristics of motor actuator used in disconnector is carried out for obtaining the relationship between shaft’s angle of motor and contact stroke of disconnector. The operating characteristics of motor during opening and closing operation of the disconnector are simulated. The magnetic saturation of motor tooth is taken into consideration in the simulation. According to the operating principle of this motor, speed-regulating control system is developed and then the experiment of 550 kV GIS disconnector and motor actuator is carried out. The results show that the switching speed of disconnector can adjust by motor actuator under the premise that the speed can meet the performance requirement of disconnector.
Design of motor and control system
The whole structure of 550 kV GIS disconnector and its mechanical connection with motor actuator are shown in Figure 1. This system diagram mainly included three parts, namely, disconnector, driving motor, and control system.

System diagram of 550 kV GIS disconnector and motor actuator.
Analysis of dynamical coordination characteristics of motor actuator used in disconnector
The structure of disconnector transmission mechanism is shown in Figure 2. In this figure, the initial and final positions of operation are marked by AB0C0 and AB1C1, respectively. The positional relationship between transmission parts of disconnector is expressed in equation (1)


Structure of disconnector transmission.
where θa is the rotated angle of motor.
The rotated angle of motor is 57.1° and 22.9° in clearance between open contacts and over-stroke stage, respectively, and the relationship between rotated angle of motor and contact stroke is shown in Figure 3. The open position, the instantaneous closing (opening) position, and the closed position of disconnector are marked by A, B, and C in this figure, respectively. The contact stroke of disconnector is 230 mm and corresponding rotated angle of motor is 80° during opening and closing operation.

Relationship between rotated angle of motor and contact stroke.
Design and dynamic simulation of the motor
Because the motor is regarded as axial symmetric structure, magnetic vector potential A has only z component. The two-dimensional magnetic field analysis of motor is necessary. In order to simplify the simulated process, assumptions are given as follows:11–13
The electromagnetic field of the motor is regarded as quasi-static field.
The end effect of the motor is included by end leakage inductance from circuit equation.
The influence of eddy-current effect is neglected.
The electromagnetic field equations of the motor are

where JS is the current density of PM surface; αa, αb, and αc are the current facts of three-phase windings, respectively; Γ1 is the stator outer boundary; Γ2 is the boundary of PM; JZa, JZb, and JZc are the current densities in the z-axis direction of three-phase windings, respectively; and µ1 and µ2 are the relative permeabilities of motor air gap and PM, respectively.
The circuit equation of the motor windings is

where [U] is the voltage vector, [E] is the electromotive force voltage vector, [R] is the resistor matrix of windings, [I] is the current vector, and [L] is the leakage inductance of windings end.
The current density of three-phase windings is defined as

where N0 is the number of single windings; a is the number of parallel branches; Sb is the sectional area of single winding; and ia, ib, and ic are the currents of three-phase windings, respectively.
The induced electromotive force of windings is

where p is the number of pole-pairs, Lef
is the effective length of armature, nm
is the total number of elements in the computational domain, q is the number of slots per pole per phase, Δ
m
is the area of single element, and
The motive equation of the motor is

where J is the equivalent moment of inertia in motor spindle side, Ω is the angular velocity of motor rotor, Tem is the electromagnetic torque of motor, TL is the load torque, and R Ω is the drag coefficient.
The equation of electromagnetic torque is

The rotated angle can be expressed as

The electromagnetic torque is calculated by the Maxwell stress method

where r is the radius of air gap; Brn and Bθn are the radial and tangential components of air gap flux density, respectively; and µ 0 is the permeability of vacuum.
The discrete equations that describe dynamic characteristics of the motor can be obtained using weighted integral method and coupling equation (3). The dynamic characteristics of the motor are calculated by solving above equations by Newton–Raphson and combining equation (6). 14,15
The structure and major parameters of the motor are shown in Figure 4 and Table 1, respectively.

Structure of the motor.
Motor parameter.

To ensure stable operation of GIS disconnector, the two-way PM limiting and keeping device installed at the end of motor is developed, and its main structure is shown in Figure 5.

The structure of permanent magnet limiting and keeping device.
The limiting armature is kept by the suction which comes from the two-way PM when the moving contact of disconnector is in closing and opening positions. In order to ensure reliable operation of disconnector, the design suction is 100°N m probably.
The magnetic field distribution and air gap flux density of the motor as shown in Figures 6 and 7, respectively, are obtained by the finite element method (FEM) calculation. The magnetic saturation as a key feature for dynamic analysis of the motor is taken into consideration in the simulation. From Figure 6, the magnetic flux density of stator tooth in no-load and max-current modes are 1.6 and 1.8 T, respectively, which reflect that the motor has been worked in nonsaturated status according to B-H curve of stator material (silicon steel sheet: DW470).

Magnetic field distribution of the motor: (a) no-load mode and (b) max-current mode.

Air flux density of the motor: (a) no-current mode and (b) max-current mode.
From Figure 7, the air flux density of motor is approximately rectangular wave in no-current mode; however, the distortion of this wave appeared in max-current mode due to torque ripple and armature reaction. The average air flux densities of the motor in these modes are more than 1 T that meet the design requirements of the motor.
The dynamic characteristics of the motor used in disconnector are obtained by numerical simulation as shown in Figure 8. The opening and closing operation times are 230 and 260 ms, respectively, and the contact stroke is 230 mm. According to the technical parameter of 550 kV GIS disconnector, the opening speed is the average speed in three-fourths stroke after instantaneous opening position, and the closing speed is the average speed in three-fourths stroke before instantaneous closing position. After the calculation, the opening and closing speeds are 1.1 and 1.2 m/s, respectively, that meet the performance requirement of 550 kV GIS disconnector.

Dynamic characteristics of disconnector in simulation: (a) closing contact stroke and speed and (b) opening contact stroke and speed.
Design of control system
According to the mechanical requirements of disconnector and operating characteristics of the motor, the speed-regulating control system based on TMS320F28335 is developed, and its system structure is shown in Figure 9.

System structure of speed-regulating control system.
The main parts of this control system are introduced as follows:
Current detection unit. The hall current sensor CHF-400B is used to collect winding current with electric isolation. The adder exists in the output circuit of hall current sensor to ensure safety of control system because the input voltage range of TMS320F28335 A/D module is 0–3.3 V.
Isolated drive unit. The integrated circuit 2SC0108T has some important features such as short-circuit protection, over-current protection, and voltage monitoring for driving insulated-gate bipolar transistor (IGBT) reliably. 16,17
Motor speed detection unit. The motor speed is acquired by calculating the number of pulses from photoelectric encoder per second.
Charge–discharge control unit of capacitor. This unit is necessary due to the capacitor as energy source for motor actuator. The charge command from digital signal processing (DSP) switch IGBT for achieving target that the voltage of capacitor is preset value before operation of disconnector.
Contact stroke detection unit. The linear displacement sensor is adopted to collect signals of contact stroke, and the A/D module is used to transmit those signals to DSP.
PC control program. For remote control of disconnector, reliable control program based on PC is necessary. In this article, the PC control program is achieved by VC++ and pass control signal to TMS320F28335 via RS232 bus.
Instantaneous closing (opening) signal detection unit. The positive pole of 9 V battery is connected to the moving contact of disconnector and the negative one connects static contact (see Figure 10). The instantaneous closing (opening) signal appeared when the moving contact touches the static contact.

Circuit connection of instantaneous closing (opening) signal detection unit.
Experiment research
To ensure feasibility and availability of the motor and control system, the experimental platform of 550 kV GIS disconnector and motor actuator as shown in Figure 11 is established and then the opening and closing experiment of disconnector is carried out.

Experimental platform of 550 kV GIS disconnector and motor actuator: (a) experimental platform, (b) angular displacement sensor, and (c) motor.
Conventional operation of disconnector
In the experiment, the energy-storage capacitance is 108,000 µF, the environment temperature is 25°C, and the voltage of capacitor is 350 V. The control command from the control system is emitted to drive motor that pushes contact to achieve operation of disconnector. The closing contact stroke and instantaneous closing signal are shown in Figure 12.

Closing contact stroke and instantaneous closing signal of disconnector.
The three points in Figure 12, namely, A, B, and C, are the open position, the instantaneous closing position, and the closed position of disconnector, respectively. The closing operating time of disconnector is 238 ms, and the rotated angle of motor is 82°. The switching speed in the initial stage is low relatively because the leaf spring that is installed at the moving contact side produces a contact pressure of 60–100 N approximately, and larger frictional force is formed. Therefore, the counter-torque that comes from the above frictional force needs to be overcome by motor actuator which influences the increase in switching speed. From Figure 11, the contact bounce (±1–2°) appeared after the motor rotates at point C due to great impact between moving contact and static contact. The three-phase winding currents of motor in closing operation of disconnector are shown in Figure 13.

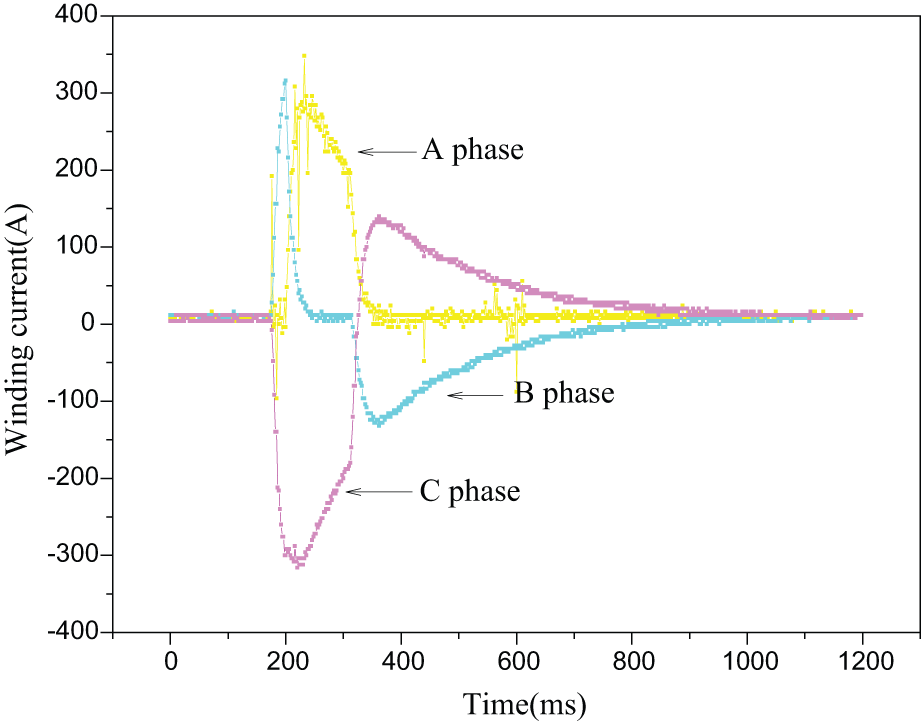
Current of the motor in closing operation.
The commutation of winding currents occurred once during closing operation, and the peak of current is 342 A. The opening operating time of disconnector is 265 ms, and the rotated angle of motor is 82°. The line AB is over-stroke stage and the line BC is clearance between open contacts (see Figure 14). The mathematical model and simulation of the motor are accurate by comparing simulated with experimental results (see Figures 8, 12, and 14). The three-phase winding currents of the motor in opening operation of disconnector are shown in Figure 15.

Opening contact stroke and instantaneous opening signal of disconnector.
Current of the motor in opening operation.
The commutation of winding currents occurred once during opening operation, and the peak of current is 339 A.
Speed-regulating operation of disconnector
In order to achieve intelligent operation of disconnector, the pulse width modulation (PWM) is used for regulating switching speed during closing operation. The contact stroke and speed of disconnector with motor actuator in regulating speed operation are shown in Figure 16.
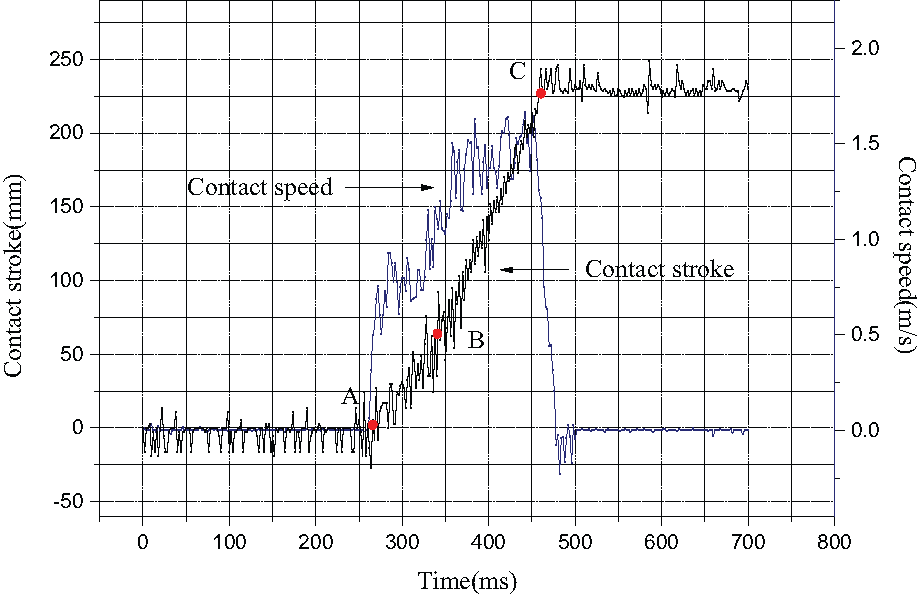
Closing contact stroke and speed in speed-regulating operation.
The switching speed of disconnector is 0.9 m/s in AB stage. After increasing the duty ratio of PWM at point B, this speed increased to 1.2 m/s in BC stage. In this experiment, the ratio of PWM has changed from 50% to 90%, and the frequency is 800 Hz. The contact bounce appeared near point C due to strong collision between the moving and static contacts. This phenomenon can be further controlled by adjusting contact speed in the last stage of closing operation.
Conclusion
The dynamical coordination characteristics of the motor actuator that is used in disconnector are analyzed. The driving motor and speed-regulating control system are developed. The experimental platform of 550 kV GIS disconnector and motor actuator is established. The opening and closing speeds are 1.1 and 1.2 m/s, respectively, when the voltage of capacitor is 350 V.
The change in switching speed from 0.9 to 1.2 m/s is achieved by motor actuator and speed-regulating control system. This novel actuator provides important technical support for suppressing VFTO by adjusting switching speed of disconnector.
Footnotes
Academic Editor: Jiu Dun Yan
Declaration of conflicting interests
The authors declare that there is no conflict of interest.
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.