
Abstract
Optimization of the control strategy plays an important role in improving the performance of electric vehicles. In order to improve the braking stability and recover the braking energy, a multi-objective genetic algorithm is applied to optimize the key parameters in the control strategy of electric vehicle electro-hydraulic composite braking system. Various limitations are considered in the optimization process, and the optimization results are verified by a software simulation platform of electric vehicle regenerative braking system in typical brake conditions. The results show that optimization objectives achieved a good astringency, and the optimized control strategy can increase the brake energy recovery effectively under the condition of ensuring the braking stability.
Keywords
Introduction
Electric vehicle (EV) electro-hydraulic composite braking system consists of motor regenerative braking system and hydraulic braking system, and the key research of this system lies in the braking force distribution and its control strategy. To gain braking energy as much as possible on the basis of braking stability is the basic principle. From the current research status of composite braking system, problems of braking stability, brake feeling consistency, and coordination between different braking modes are all related to the control strategy. Considering that the optimization of control strategy of EV electro-hydraulic composite braking system is a multi-object and multi-border issue, multi-objective collaborative optimization will be an effective way to improve the performance of EVs. 1
A few investigations have been reported for multi-objective optimization of EV and hybrid electric vehicle (HEV). Zhang et al. 2 described the application of multi-objective genetic algorithm (MOGA) in the optimization of work modes and energy distribution of HEV, with the objectives of minimum fuel consumption and emissions, while the establishment of objective function shows great subjectivity on the weight selection of each object. Montazeri-Gh et al. 3 proposed a braking force distribution strategy from the viewpoint of maximum energy recovery and used genetic algorithm (GA) to solve the constrained optimization problem, but the vehicle performance requirements are not considered in the optimization process. In the study by Yang and Huang, 4 a methodology was investigated to build an approximation model based on a vehicle multi-body model for optimizing the vehicle’s handling and riding comfort; the constraint conditions can be further optimized to make the results more satisfying.
In this article, a braking force distribution strategy is proposed in the viewpoint of the maximum energy recovery, and a MOGA is introduced to optimize the key parameters in the control strategy. The optimization results are tested and verified through the software simulation platform.
Structure and control strategy
The establishment of vehicle dynamic model is necessary; it is the fundamental of regenerative braking power transmission. In this model, the inputs are motor regenerative braking force and front and rear axle hydraulic braking force, and the output is vehicle speed.
According to the vehicle driving equation

where
That is

where
According to the different working modes of motor regenerative braking force and mechanical braking force, EV electro-hydraulic composite braking system can be divided into two kinds of series and parallel structure. In order to overcome the shortcoming that hydraulic braking force is not adjustable for parallel regenerative braking system, and reduce the complexity of the structure of the regenerative braking system, this article proposes a single-axle series regenerative braking system structure, as shown in Figure 1.

Structure of single-axle series regenerative braking system.
This kind of structure adds a pressure regulating valve in the front axle hydraulic brake line and makes the front axle hydraulic braking force adjustable. When it brakes, front and rear axle braking force distributes according to the mechanical braking force distribution coefficient. At the same time, the engine control unit (ECU) will determine to carry out regenerative mode and calculate the regenerative braking force that motor can provide based on the vehicle speed, battery state of charge (SOC) value, and so on. Then, compare the calculated regenerative braking force with the front axle required braking force, and the smaller will be the actual motor regenerative braking force. The front axle hydraulic braking force and the motor regenerative braking force consist of the total demand braking force of the front axle. The flowchart of single-axle series regenerative braking control strategy is shown in Figure 2.

The flowchart of single-axle series regenerative braking control strategy.
Multi-objective optimization problem description
The braking force distribution of EV electro-hydraulic composite braking system mainly consists of two parts: (1) front and rear axle braking force distribution and (2) hydraulic braking force and motor regenerative braking force distribution. The former mainly affects the stability during vehicle braking, while the latter mainly affects the vehicle brake energy recovery efficiency. Therefore, the design principle of composite braking force distribution is to recover as much as possible of the motor regenerative braking energy in the guarantee of vehicle safety. In this article, braking stability and braking energy recovery efficiency will be designed as the control targets to optimize the control strategy of EV electro-hydraulic composite braking system.
Design variables
With the participation of regenerative braking motor, the braking force distribution coefficient changes and no longer be a fixed proportion of traditional mechanical braking system. First, in order to ensure the braking performance and braking stability of mechanical braking system, the braking force distribution coefficient should be controlled in a reasonable range according to the Economic Commission for Europe (ECE) braking regulations; Second, battery SOC value will affect the resistance and efficiency of charge and discharge, so the reasonable range of SOC can improve the energy utilization of the battery; Third, the role the motor plays in the braking process is an important index of regenerative brake energy recovery efficiency, and the maximum motor regenerative braking torque is not corresponding to the maximum effective regenerative braking power of the motor. Therefore, the design variables of EV electro-hydraulic composite braking system can be as follows

where
Objective functions
Objective function of braking stability
The braking stability changes because of the motor regenerative braking force. As the motor regenerative braking torque affects the vehicle speed variation, an excess of motor regenerative braking torque on the front axle will make the front axle lock before the rear axle for the front axle drive vehicles. This will not only deprive the front wheel of steering ability but also make the adhesion coefficient utilization curves beyond the range specified in ECE regulations, the braking stability will reduce because of it. Therefore, front and rear wheel adhesion coefficient utilization satisfying the ECE regulations will be served as the objective function of braking stability.
The adhesion coefficient characterizes the utilization of road adhesion conditions, which is defined as follows 5

where
On the basis of kinematic analysis, adhesion coefficient utilization to the electro-hydraulic composite braking system can be expressed as


where
Li and Zhou 6 gave a conclusion that the closer the adhesion coefficient is to the braking rate, the more fully the road adhesion conditions will play. This means the braking force distribution is more reasonable. Ideally, the adhesion coefficient utilization will always be equal to the braking rate.
Therefore, front and rear wheel adhesion coefficient utilization satisfying the ECE regulations regarded as objective function of braking stability can be expressed as

Objective function of brake energy recovery efficiency
In the process of regenerative braking of EV, braking energy generated by the motor is finally stored in the battery in the form of electrical energy. The generating efficiency of the motor and the charging efficiency of the battery will directly affect the recovery efficiency of braking energy. Therefore, effective regenerative braking power through the motor generation and battery charging finally stored in the battery will be served as the objective function of brake energy recovery efficiency.
The motor generating efficiency is associated with motor speed and braking torque, while the battery charging efficiency is associated with battery SOC value and battery temperature. Therefore, joint efficiency of the motor and battery system can be expressed as

where
Therefore, the maximum effective regenerative braking power regarded as the objective function of brake energy recovery efficiency can be expressed as

Constraint conditions
The following constraints should be taken into consideration in the optimization process of the objective functions, such as the requirements of ECE braking regulations to the front and rear axle braking force distribution, limitations of motor peak torque, limitations of battery charging power, and relationship between braking stability and road adhesion conditions. These can be expressed as




where
Application of non-dominated sorting genetic algorithm II for braking force distribution
How to perform a delicate balance between the targets in competitive relationship is the key to solving the multi-objective optimization problems, which means seeking non-dominated solution set in the decision space. On the other hand, GA is not subject to the constraints of the problem and can effectively maintain population diversity and evenness. With good robustness and global search ability, it is widely used in solving multi-objective problems. Thus, MOGA based on non-dominated solution set can not only avoid the defects of subjectivity to the traditional multi-objective optimization methods but also search optimal solution of multi-objective problems in the global range with the stochastic characteristics of GA and becomes a new way to solve the electro-hydraulic composite braking system optimization problems.
Non-dominated sorting genetic algorithm II (NSGA-II) is used frequently in recent years as a MOGA. By introducing the elitist strategy, the outstanding individuals in parent population will be introduced directly into the progeny population. All individuals in the population are mixed and carried non-dominant sorting. This could ensure the algorithm to search the optimal solution with probability 1, while taking the population diversity into account. The flowchart of NSGA-II is shown in Figure 3.

The flowchart of NSGA-II.
NSGA-II shows great performance in convergence of the algorithms, distribution of the individuals, and operation efficiency. 7 Thus, for the dual-objective optimization problem in this article, NSGA-II is adopted to obtain better solutions.
By imbedding the MATLAB model of multi-objective problem into Isight, software of multidisciplinary design optimization, the design variables in the optimization space can automatically search and iterate operation based on NSGA-II, so it can optimize the key parameters in control strategy. In the process of optimization, parameters of NSGA-II are set as follows: population size is 30, crossover rate is 0.8, and variation rate is 0.1. A series of non-dominated solution set could be obtained after repeated iteration.
The initial population and the progeny population must value in the given range to ensure that each generated individual is a feasible solution. 8 Results of multi-objective optimization are shown in Figure 4.

Results of multi-objective optimization: (a) initial population, (b) the 50th generation population, and (c) the 100th generation population.
It reflects the evolution process of the optimization objectives from the initial population to the 100th generation population, eventually converges to a set of Pareto optimal solutions. Figure 4(c) shows the evolution results of the 100th generation population. In this figure, each point corresponds to a Pareto non-dominated solution and those increase significantly, all the individuals are evenly distributed to get a Pareto front.
After analysis, a group of optimization results are selected to be the parameters of simulation models, as shown in Table 1.
Optimization results.

Simulation
In order to verify the effects of different control strategies on braking performance of EV, a backward simulation model of EV regenerative braking system is established based on the MATLAB/Simulink. Simulations are carried out over typical brake conditions, and the top-level module of the simulation model is shown in Figure 5.
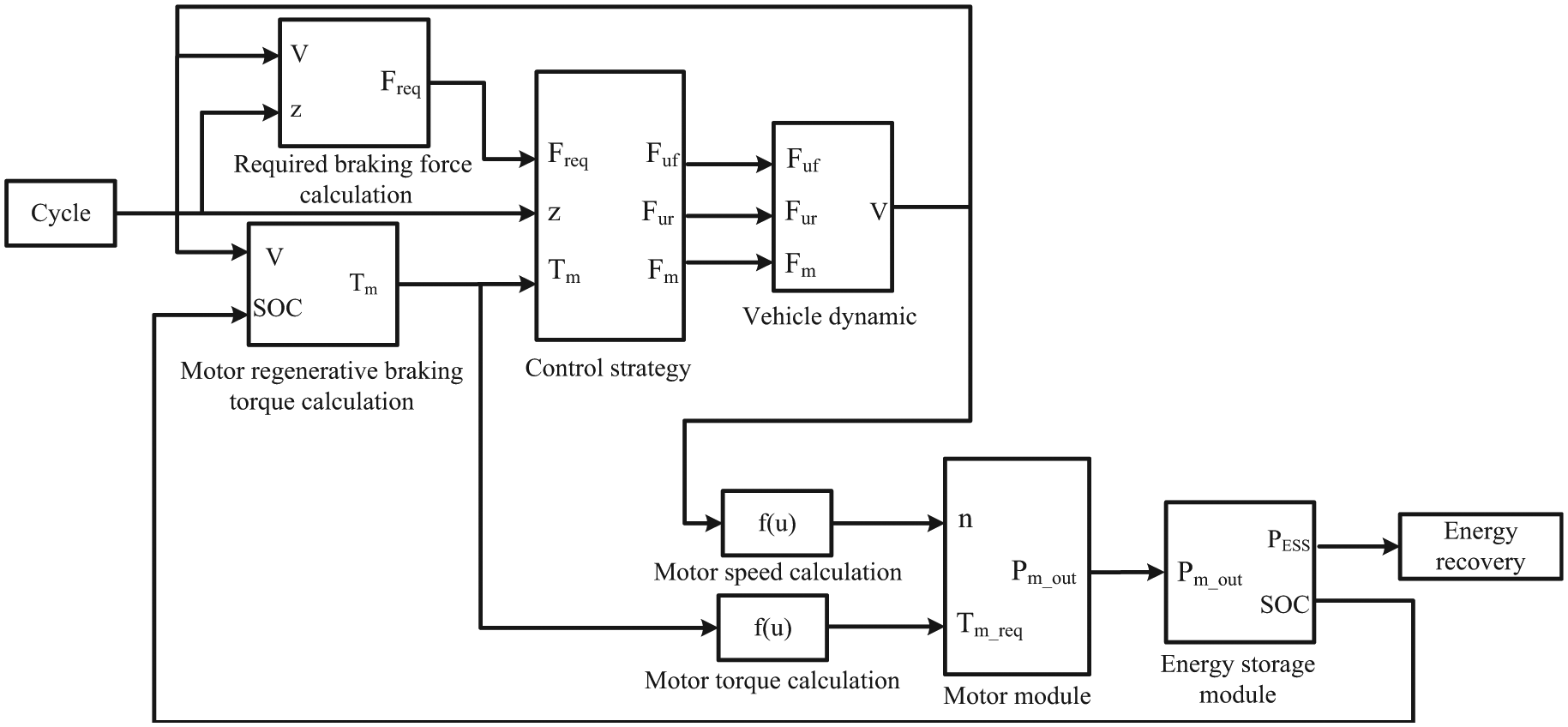
Simulation model of electric vehicle regenerative braking system.
This model can simulate the braking intention of the driver and carry out the simulations of conventional braking and cycle braking. Besides, it can assess the simulation results of different control strategies by modifying the parameters. According to the functional requirements of the simulation model, system delay and execution errors of the motor and the brake will not be taken into account in the process of modeling. As the transmission of regenerative energy is not involved in the simulation process, brake modeling is ignored and the braking command is transferred directly from the control system to the vehicle dynamics model. 9 The main parameters in the simulation process are shown in Table 2.
Simulation parameters.

Figure 6 represents the driver’s braking rate curve of the whole simulation process. It can be seen that braking is frequent in the whole simulation and that will make full use of the regenerative braking of EV in terms of energy recovery.

Curve of braking rate.
Figure 7 shows the curves of braking force in the simulation process. As the demand of braking force is less in the initial stage of braking, the motor works alone to meet the braking requirements of the vehicle. Thus, regenerative braking system works to recover braking energy. With the increase in required braking force, the motor and the conventional friction brake system work together to realize the vehicle brake. The front and rear axle hydraulic braking force increases gradually, and the motor works in maximum regenerative braking state to maximize the energy recovery. The optimization results meet the requirements of control strategy.

Braking force distribution by optimization.
Figure 8 shows the curves of EV energy recovery before and after optimization. It indicates that the introduction of MOGA and the optimization of key parameters play an important role in the improvement of EV brake energy recovery efficiency.

Energy recovery of the vehicle.
Conclusion
Optimization of the control strategy of EV electro-hydraulic composite braking system has an important impact on brake energy recovery. In order to keep a balance between the braking stability and the energy recovery efficiency, a MOGA is applied to solve this problem, and various constraints are taken into account in the optimization process. Based on the simulation platform of EV regenerative braking system, the optimization results are verified. The simulation results show that the braking force distribution with MOGA takes advantage of the motor braking torque, and the brake energy recovery efficiency improves effectively in the typical brake conditions. The optimization results are satisfying.
Footnotes
Declaration of conflicting interests
The authors declare that there is no conflict of interest.
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.