
Abstract
This paper proposed a novel generalized preview-following methodology integrating coupled suspension roll characteristics for vehicles. The road geometry is described via a parametric time-dependent cubic spline, which represents road direction, curvature, and curvature rate. The ideal preview trajectory transfer function is derived, and the future lateral position of the vehicle is defined by a third-order polynomial. By minimizing the deviation between the preview path and the vehicle’s future lateral position within an objective function, the effective road preview input is determined. A distinctive correction function is introduced based on an equivalent handling dynamics model that incorporates coupled suspension roll characteristics. Experimental validation of the closed-loop system is carried out, through comparative data analysis with the ISO 3888-1 double lane change maneuver at 80 km/h. Furthermore, the impact of roll motion on trajectory tracking precision, quantified by dedicated total variance metrics, is systematically assessed across varying vehicle speeds. The minimum total variance values of trajectory tracking are 0.21 and 0.16 at the first and rear suspensions, respectively. The results demonstrate that the proposed method effectively optimizes suspension roll dynamics to enhance the lane-keeping performance in commercial vehicles, especially under conditions where suspension-roll effects are pronounced.
Keywords
Introduction
In recent years, commercial vehicles active safety has garnered substantial attention. The application of Advanced Driver Assistance Systems (ADAS) is becoming increasingly prevalent in buses and commercial vehicles, with Lane Keeping Assist Systems (LKAS) being a key example. These systems enhance safety by using cameras to detect lane markings and integrating data on steering angle, vehicle speed, and dynamics to perform preview-based trajectory tracking, thereby effectively mitigating unintentional lane departures.1–3 Commercial vehicles present distinct challenges owing to extended wheelbases, increased mass, and elevated centers of gravity. Consequently, the trajectory tracking performance is highly susceptible to multi-source uncertainties, including steering, uneven road excitation and suspension roll dynamics.4,5 This necessitates a more comprehensive consideration of the vehicle dynamics in the controller design.6,7
Trajectory tracking constitutes a crucial component in the development of commercial vehicle, with the optimal preview-follower theory being commonly employed. 8 Further improvements have been attained through the application of adaptive learning model predictive control (MPC) for autonomous ground vehicles.9,10 The suspension variable-geometry11,12 and cornering characteristics 13 have been integrated into the control algorithm to augment vehicle tracking stability and driving safety under complex extreme conditions. Saleh et al. 14 proposes a novel cybernetic driver model for lane-keeping control, integrating visual road geometry perception, haptic feedback, and neuromuscular dynamics. Through driving simulator experiments conducted across a wide range of speeds, the study establishes quantitative relationships between identified model parameters and human driver behavioral characteristics, thereby validating the model’s biological fidelity for autonomous vehicle applications. Hong et al. 15 introduces a shared control architecture that enables seamless mode transitions through a smoothly weighted MPC approach, with dynamic weight adaptation across the prediction horizon. Wu et al. 16 proposes an integrated robust model matching chassis controller to improve vehicle handling performance and lane keep performance. The H∞ controller design is grounded in linear matrix inequalities and integrates active rear wheel steering control, longitudinal force compensation, and active yaw moment control. Moreover, a comprehensive evaluation of the closed-loop driver–vehicle system is carried out. Amditis et al. 17 proposes a model-based lane-keeping control framework tailored for complex driving scenarios, incorporating multi-modal environmental perception and adaptive decision-making algorithms.
The performance of closed-loop systems can be significantly enhanced by fully exploiting known future information regarding the desired trajectory or disturbance signals. Guo studies the driver-vehicle-road closed-loop system and preview follower driver model, incorporating the varying vehicle speed, 18 and jerky dynamics. 19 The suspension roll steer effect generates additional lateral forces, and the three-axle kinematic coupling considerably influences the vehicle’s dynamic response characteristics. An equivalent handling model incorporating suspension roll characteristics has been established, which is applicable to n-axle commercial vehicle. 20 Deng et al. 21 enhances the directional stability of articulated heavy vehicles through a multi-point preview-predictor control strategy. The study implements a triple-preview-point driver model and rigorously validates its path-tracking performance under diverse operating conditions. Zhao and Lin 22 develops a multidimensional assessment framework for driver-vehicle closed-loop dynamics, systematically analyzing human-machine interactions with a particular focus on coupling mechanisms during critical maneuvers, including high-speed lane changes and emergency obstacle avoidance scenarios.
According to the proposed method of previewed cubic spline, the steering angle of the control system has been calculated, and a general mathematical expression has been derived. The results of the lateral control strategy were compared with experimental measurements. The effect of the front and rear suspension roll steers on the evaluation index of trajectory tracking total variance was analyzed at different vehicle velocities, providing a basis for optimizing suspension K&C characteristics.
The main contributions of this study are as follows:
A generalized optimal cubic spline preview-follower method, tailored for commercial vehicles with a high center of mass and long wheelbase, has been developed. This strategy utilizes a cubic spline method to represent both the path (in terms of direction, curvature, and curvature rate coefficients) and the vehicle’s predicted future lateral position, which is characterized by lateral velocity, acceleration, and jerk coefficients.
A unique correction function is introduced, which is based on an equivalent handling dynamics model that integrates coupled suspension roll characteristics. A comprehensive equivalent handling dynamics model is proposed, which explicitly incorporates suspension roll-steer effects and the critical coupling dynamics among multiple axles. This model is formulated with the intention of being generically applicable to commercial vehicles.
The closed-loop system undergoes experimental validation through comparative analysis of data. Furthermore, a systematic evaluation is conducted to assess the impact of the suspension roll of the first and rear axles on trajectory tracking precision. This precision is quantified by unique total variance metrics, and the evaluation is carried out under a range of vehicle speeds. This analysis offers direct insights for optimizing suspension Kinematics & Compliance (K&C) characteristics and improving lane-keeping accuracy, particularly under conditions characterized by substantial suspension roll effects.
Generalized optimal cubic spline preview-follower
The local coordinate system

where
The preview time

where
The parametric representation of the road geometry through
where
The Laplace transform of equation (3) is

where
The ideal preview trajectory transfer function

where
The future lateral position of vehicle is defined using a cubic spline, such that

where
As illustrated in Figure 1, the point

where J is objective function,

Cubic spline preview path.
The optimal partial derivative of equation (7) is obtained by
With

where
Equations (9a) and (9b) can be reformulated as

where

Multiplying equations (10a) and (10b) by

Furthermore, the following equivalent transformation forms of equations (11a) and (11b) are derived


where

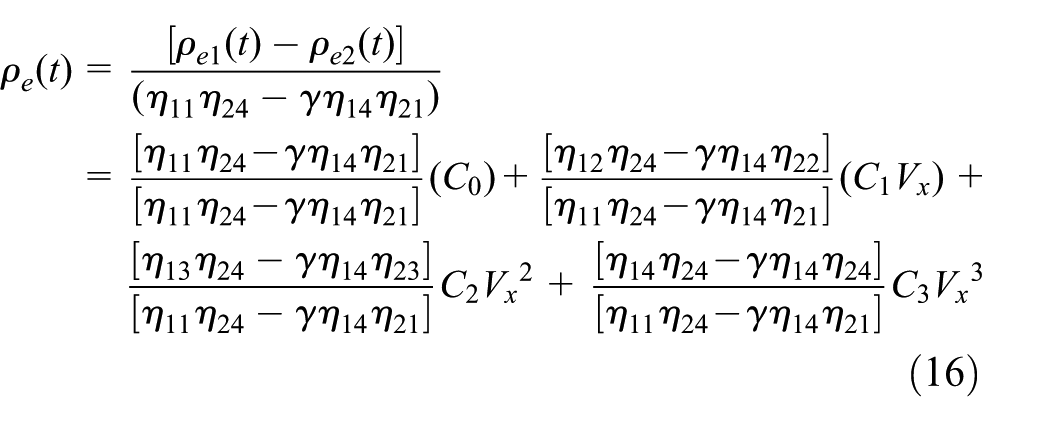
By combining (12a) and (12b), we have
So that

where


Correction function of equivalent handling model
The commercial vehicles can be assumed that the lateral acceleration is constant and there is no pitching motion, shown in Figure 2. Figure 2(I) shows the cubic spline preview-follower and Figure 2(II) shows the roll steer kinematic. The cornering stiffness of both tires are same, and tire force is the simplest linear. The 3DOF vehicle model can be constructed with coordinate systems of

Correction function and equivalent handling model.
The total external forces acting on the entire vehicle in the lateral direction are

Analysis of the total yaw moment about the Z-axis reveals that

where
The 3DOF vehicle model can be changed to


where
The steady-state roll angle is determined by the total rolling moment about the X-axis, as

where
The lateral acceleration is calculated as

The equivalent signed distances from the vehicle’s center of gravity to the first and rear axles are determined by equation (22), such that

The roll steer kinematic of front suspension and rear suspension are tested through suspension rebound travel, shown in Figures 3 and 4.

Roll steer kinematic of front suspension.

Roll steer kinematic of rear suspension.
The unified lateral acceleration transfer function is given by

where
The


According to the preview-following system, the correct function

where
Then, the equation (27) can be rewritten as

where


Closed-loop characteristics with roll effect
The calculated optimal lateral acceleration derived in equation (15) is implemented in the closed-loop system of Figure 5, which explicitly incorporates suspension roll characteristics within its block diagram.

Closed-loop system with effect of roll characteristics.
The effective preview function

According to equations (13a) and (13b), the Laplace transform of


The effective preview function

According to equation (5), the Taylor’s series of
The preview function
where

The optimal steering input considering the suspension roll effect can be determined by

According to Figure 5, the whole transfer function of closed-loop system incorporating suspension roll characteristics is

The frequency-domain analysis of a closed-loop system transfer function involves examining the system’s response to sinusoidal inputs over a range of frequencies using the closed-loop transfer function.

The trajectory error transfer function is defined as

Based on the theory of Plancherel, the trajectory error variance is expressed as

where
According to equations (35)–(40), the evaluation index considering bus coupled roll dynamics is defined as

where
The closed-loop characteristics of generalized optimal cubic spline preview-following methodology incorporating two-axle suspension roll dynamics were experimentally assessed through the ISO 3888-1 double lane change maneuver at 80 km/h. Figure 6 shows the double lane change test method for bus handling and stability. The value of trajectory parameters are in Table 1.

Double lane change test method for bus handling stability.
Trajectory parameters (unit: m).

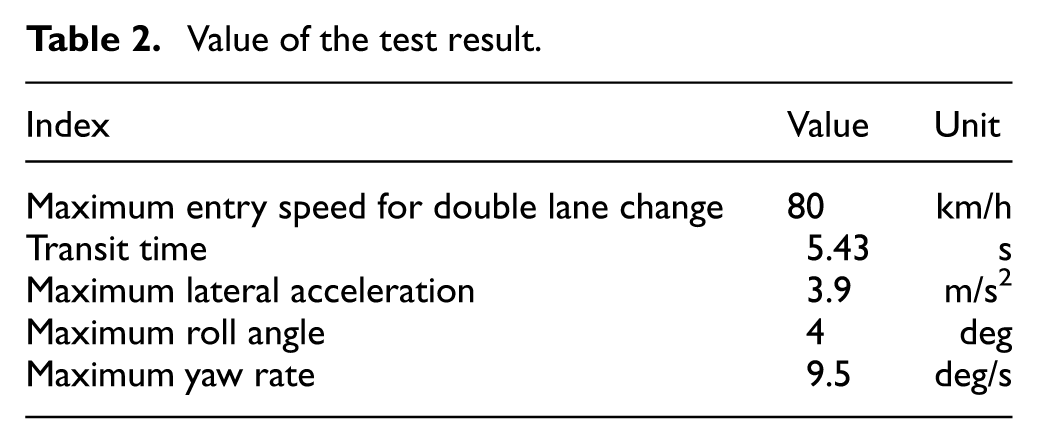
The lateral acceleration were measured by a gyroscope installed in the vehicle, and the lateral distance was integral calculated. The closed-loop system exhibits a delay time of 0.2 s, whereas the visual latency has a delay time of 0.1 s. The vehicle parameters are listed in Appendix A (Table 3) and the closed-loop characteristics was identified. Figure 7 presents a comparison between the path trajectory identification and the corresponding test results. The value of the test result is shown in Table 2.

Validation of trajectory tracking under double lane change.
Value of the test result.
The suspension roll steer is described by a unified transfer function of the vehicle’s lateral acceleration. The coupled roll dynamics substantially affect closed-loop system performance. The trajectory tracking total variance, adopted as a performance metric, is defined in equation (42). Figure 8 illustrates the total variance values under varying front suspension roll steer settings at vehicle speeds of 60, 70, and 80 km/h. Both excessively high and low roll steer values increase the trajectory tracking total variance. Figure 9 present analogous results for the rear suspension roll steer, respectively, at the same speeds. Either excessively high or low roll steer can elevate the higher trajectory tracking total variance, a relationship that can guide the optimization of suspension K&C characteristics.

Effect of the front suspension roll steer on trajectory tracking.

Effect of the rear suspension roll steer on trajectory tracking.
Conclusion
In this study, a generalized optimal preview-follower closed-loop model incorporating suspension roll dynamics was formulated, and an in-depth analysis of the trajectory tracking performance of the closed-loop system was carried out. Both the previewed front trajectory and the vehicle’s predicted lateral position were modeled using third-degree polynomial functions. The lane centerline coordinates were parameterized by three pivotal coefficients: trajectory direction, curvature, and curvature rate. Correspondingly, to accurately track the lane, the vehicle’s lateral position was depicted as a cubic spline polynomial, which was defined by the vehicle’s lateral velocity, acceleration, and jerk, enabling it to adapt to the changing lane geometry.
Critically, the coupling effect of suspension roll steer was identified as a primary factor influencing handling dynamics, generating lateral forces that modify vehicle behavior. To address this, an equivalent handling model and a lateral acceleration transfer function, both explicitly incorporating suspension roll characteristics were formulated. These models and functions facilitate the derivation of a generalized closed-loop steering angle expression. Comparative results demonstrate a high level of agreement between the simulated and experimental data. Moreover, the effect of suspension roll steer on the trajectory tracking evaluation index (total variance) was analyzed across different vehicle velocities, thereby offering a foundation for optimizing suspension Kinematics & Compliance (K&C) characteristics.
For the closed-loop system, the theoretical expression of the trajectory tracking performance evaluation index was derived using frequency-domain analysis. A systematic evaluation was conducted to assess the impact of suspension roll steer characteristics (pertaining to the front and rear axles) on trajectory tracking at vehicle speeds of 60, 70, and 80 km/h. Results indicate that either excessively high or low roll steer values lead to an increase in the total variance in trajectory tracking. This finding can serve as a valuable guide for the optimization of suspension roll steer and K&C characteristics.
Overall, the integration of commercial vehicles roll dynamics with preview-following control establishes a robust framework for LKAS design. Explicit modeling of suspension roll effects significantly improves path-tracking precision during dynamic maneuvers. This advancement significantly enhances active safety for both autonomous and ADAS-eq55 commercial vehicles. Since suspension K&C characteristics also encompass other system parameters, the discussion scope of suspension K&C characteristic parameters can be expanded to obtain more comprehensive results. However, a limitation of this study is its failure to address all factors related to occupant comfort. Consequently, future work will extend the model to incorporate motion sickness and other critical comfort metrics, thereby establishing a more comprehensive closed-loop system.
Footnotes
Appendix A
Parameters of the commercial vehicle.

| Parameter | Value | Unit |
|---|---|---|
| Total vehicle mass yaw moment of inertia | 16,000 | kg m2 |
| Vehicle length | 7.37 | m |
| Vehicle width | 2 | m |
| Wheelbase | 3.93 | m |
| Roll moment arm | 0.5 | m |
| Roll inertia of the sprung mass | 2248 | kg m2 |
| Total vehicle mass | 5300 | kg |
| Total vehicle mass yaw moment of inertia | 16,000 | kg m2 |
| Moment per unit roll angle | 206,000 | N m/rad |
| Front tire cornering stiffness | 1558 | N/deg |
| Rear tire cornering stiffness | 3830 | N/deg |
Handling Editor: Divyam Semwal
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors are grateful to the financial support of the Key Research & Development projects of Henan Province (No. 251111241900); Henan Natural Science Foundation for Distinguished Young Scholars 252300421015; National Natural Science Foundation of China (NSFC) under Grant 52472441; Science and Technology Development Plan Projects of Henan Province (Nos. 262102240091; 252102240099); Zhongyuan Sci-Tech Innovation Leading Talents (No. 244200510045); Henan Center for Outstanding Overseas Scientists under Grant GZS2023011; Doctor Research Foundation of Zhengzhou University of Light Industry 2024BSJJ010.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.