
Abstract
Six Degrees of Freedom (6-DOF) industrial robot inverse kinematics solutions are constrained by high-dimensional nonlinearity, multi-solution problems, and traditional algorithms’ local optima tendency, affecting operational accuracy and real-time performance. Both traditional analytical methods and standard swarm intelligence algorithms are confronted with numerous challenges. To address these issues, this paper proposes an inverse solution method based on an improved Coati Optimization Algorithm (COA). The Modified Denavit-Hartenberg (MD-H) kinematic model is introduced to solve the joint singularity problem, and an improved COA based on an elite retention strategy and dynamic weights is proposed. The diversity of the population is enhanced through a mutation mechanism to improve convergence efficiency, and dynamic weights are used to balance position and orientation errors. The experimental results show that when performing inverse kinematics calculations on 10 groups of spatial points, this algorithm outperforms the standard algorithms (Whale Optimization Algorithm (WOA), standard COA, Particle Swarm Optimization Algorithm (PSO), and Genetic Algorithm (GA)) in terms of average number of iterations (40.4 times), average position error (0.0021 mm), and average orientation error (8.5 × 10−5 rad), meeting the accuracy requirements of industrial robot inverse kinematics and providing a new method for robot inverse solution.
Introduction
Under the backdrop of the rapid development of intelligent manufacturing and industrial automation, 6-DOF industrial robots have become core equipment in fields such as automotive manufacturing, electronic assembly, and aerospace due to their flexible motion capabilities and wide applicability. The inverse kinematics solution of robots, as the foundation for precise trajectory planning and control, 1 directly affects the operational performance of industrial robots in terms of its solving efficiency and accuracy.2–4 The inverse kinematics problem is essentially a highly nonlinear and strongly coupled complex solution process,5–7 with challenges such as multiple solutions, large computational load, and sensitivity to initial values.8,9 In recent years, various swarm intelligence optimization algorithms have been applied to the inverse kinematics solution of 6-DOF manipulators, such as the Boomerang algorithm based on swarm optimization proposed by Duymazlar and Engin, 10 and the research by Galan-Uribe and Morales-Velazquez 11 on kinematic optimization of 6-DOF serial robot arms using bio-inspired algorithms.
The existing inverse kinematics solution methods are mainly divided into three categories: analytical methods, numerical iterative methods, and intelligent optimization algorithms. The analytical method is an algebraic solution or geometric decomposition method based on the D-H parameter model.7,12 Although this method can obtain an exact solution, it has strict requirements for the robot configuration. 6 For example, the Pieper criterion requires that the axes of three adjacent joints intersect 13 and it requires a large number of trigonometric function operations, resulting in poor real-time performance. Numerical methods such as the Newton iterative method are universal, but they are dependent on the initial value selection and are prone to getting stuck in local optima. The singularity problem of the Jacobian matrix during the iterative process can lead to calculation failure.14,15 With the rise of intelligent optimization algorithms, PSO,16,17 GA,18,19 WOA, 20 and others have been widely applied in inverse solution solving. In the research related to intelligent algorithms and inverse kinematics of robots, He et al. 21 proposed an radial basis function-proportional integral differentiation (RBF-PID) adaptive controller that combines radial basis function neural networks with PID control, which improves the solution accuracy but the convergence speed still needs to be optimized. Li et al. 22 proposed an extreme learning machine-sparrow search algorithm-sine cosine algorithm (ELM-SSA-SCA) hybrid algorithm that integrates extreme learning machines with swarm intelligence algorithms, achieving a breakthrough in solution efficiency, but the multi-solution screening mechanism still needs to be improved.
The existing intelligent algorithms still face three core problems when dealing with the inverse kinematics of 6-DOF robots: Firstly, traditional swarm intelligence algorithms such as PSO have the phenomenon of “premature convergence,” and are prone to getting stuck in local optima in high-dimensional solution spaces. Secondly, the multi-solution problem may cause the solution results to exceed the joint movement range, requiring additional constraint processing mechanisms. Thirdly, the real-time requirements of industrial scenarios demand a balance between accuracy and computational efficiency in the algorithm. For instance, Wu et al. 23 proposed the geese migration optimization (GMO) algorithm, which enhances the global search ability by simulating the migration behavior of geese. However, its convergence accuracy in complex poses still needs improvement. Li et al. 24 proposed the bidirectional opposite differential evolution–cuckoo search (BODE-CS) algorithm, which combines differential evolution and cuckoo search and optimizes the solution process through dynamic parameter adjustment. However, the parameter self-adaptive mechanism still relies on empirical settings. Recent research has further advanced the development of this field. Dereli 25 proposed an improved grey wolf optimization algorithm by modifying the control parameters of the traditional GWO algorithm, which was successfully applied to the inverse kinematics solution of a 7-DOF redundant robot manipulator, significantly enhancing the algorithm’s convergence accuracy. Dereli and Köker, 26 inspired by the motion of a golf ball, introduced the Random Descent Velocity (RDV) inertia weight PSO technique. This method simulates the parabolic descent structure of a golf ball as it approaches the target, converting the particle velocity into a more optimal movement pattern. In the inverse kinematics calculation of a 7-joint robot arm, it achieved an optimization effect thousands of times better than the traditional PSO algorithm.
The COA is an advanced heuristic algorithm inspired by biological intelligence, proposed by Dehghani et al. 27 The algorithm design is inspired by the unique behavior patterns of raccoon groups in nature. When hunting for prey, some members of the raccoon group are responsible for disturbing the prey to make it flee, while others wait at key positions. This collaborative behavior enables them to effectively search for prey in complex environments. This hunting behavior corresponds to the global search process in COA, allowing the algorithm to widely explore the solution space and find potential optimal solutions. When encountering predators, raccoons quickly search for escape routes within their local area, which corresponds to the local exploitation mechanism in the algorithm and enables fine search near better solutions, further improving the quality of the solution. It has shown good performance in function optimization and engineering problems. However, the traditional COA has deficiencies such as insufficient maintenance of population diversity and weak local exploitation ability when dealing with high-dimensional and strongly nonlinear problems like the inverse kinematics of robots.28,29
To address these issues, this paper proposes a 6-DOF industrial robot kinematic inverse solution method based on the improved COA. By introducing a mutation mechanism based on elitism strategy and a dynamic logarithmic weight strategy, the global search ability and convergence accuracy of the algorithm are enhanced. Specifically: (1) The MD-H model is introduced to establish a transformation matrix with redundant parameters, completing the modeling of the transformation relationship of the industrial robot link coordinate system and laying the foundation for the solution of the kinematic inverse solution. (2) The COA and the kinematic inverse solution problem are combined, mapping the joint angles of the industrial robot to individual position coordinates and establishing an appropriate fitness function. (3) Elitism strategy and dynamic weighting factor are introduced to optimize the mutation, weight, and search mechanisms, improving the performance of COA. (4) The improved COA is applied to the kinematic inverse solution experiment of industrial robots, and the results show that the algorithm can effectively obtain the inverse solution.
The remaining parts of this paper are as follows. Section “Kinematic modeling of 6-DOF industrial robots” elaborates on the kinematic modeling principle of 6-DOF industrial robots; Section “A kinematic inverse solution method for the MD-H model based on the improved COA” elaborates on the specific principle of the kinematic inverse solution of industrial robots based on the improved COA; Section “Experiment” verifies the performance of the proposed method through experiments; finally, Section “Conclusion” provides a summary of the content of this paper.
Kinematic modeling of 6-DOF industrial robots
In the field of kinematic analysis of industrial robots, the D-H model, as a classic modeling method, is widely used. This model describes the pose transformation relationship between the base and the end effector of an industrial robot by defining four geometric parameters between adjacent links. However, when the axes of adjacent joints are parallel or nearly parallel, the D-H model may encounter kinematic singularity problems due to the deficiency of its parameter system: the coordinate system establishment process lacks continuity, resulting in sudden changes in some parameters. To address this issue, Hayati
30
proposed an improved solution, which introduced an additional rotation angle
The industrial robot selected for this study is the IRB2600 industrial robot from ABB, which is a 6-DOF serial robot. The schematic diagram of the robot’s link model is shown in Figure 1. Due to the parallel relationship between the second and third axes of this robot, this special structure poses limitations in traditional kinematic modeling. Therefore, an additional angle parameter

Based on the MD-H model, the kinematic parameters of the IRB2600 industrial robot are shown in Table 1. The values in parentheses represent the parameters at the zero point state (initial values). Among them,

ABB robot link model.

Adjacent connecting rod model.
Kinematic parameters of IRB2600 industrial robot.
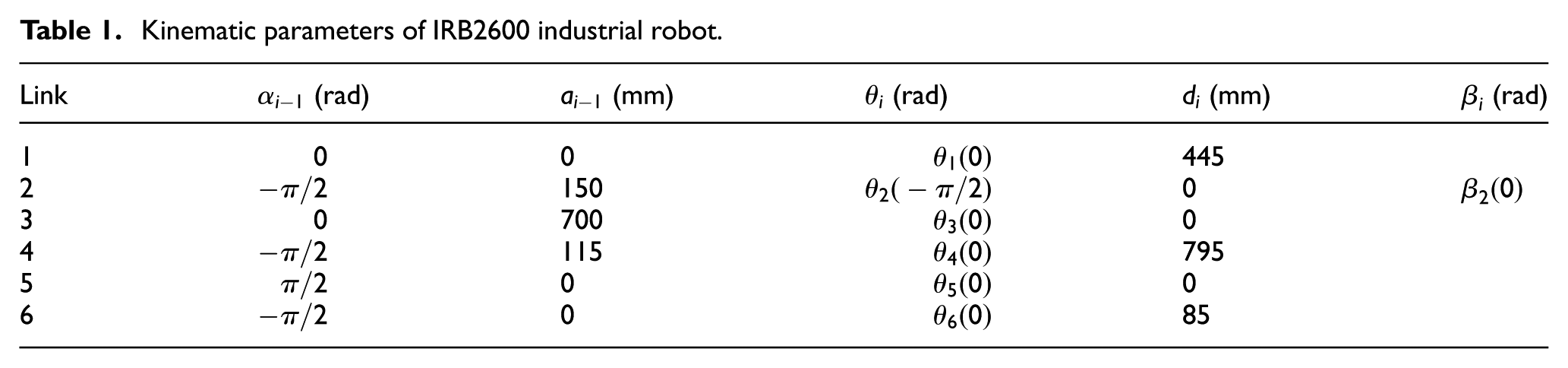
As long as each parameter in the table is known, the correspondence between the joint angles and the end-effector pose can be confirmed. Therefore, in the kinematic analysis of the robot, as long as the parameters are given, a unique transformation matrix
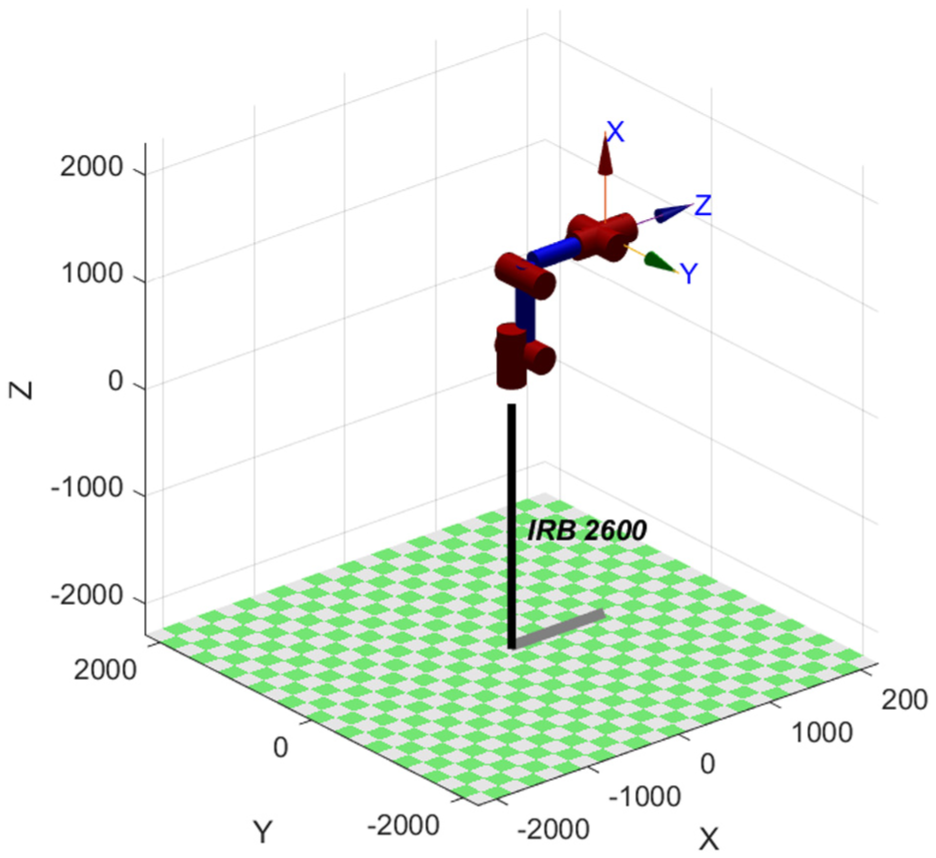
Simulation diagram of IRB2600 model.
A kinematic inverse solution method for the MD-H model based on the improved COA
The principle of COA
COA initialization
COA is a population-based meta-heuristic method, where each raccoon individual is regarded as a member of the population, and its position in the search space represents the values of decision variables. Therefore, in COA, the position

Here,
The population in COA can be represented by the population matrix

To assess the feasibility of each candidate solution, a fitness function needs to be constructed. The definition of the fitness function

In the COA,
The mathematical model of COA
In COA, the update process of an individual position
1. The hunting strategy when encountering prey (global search behavior).
When simulating the predation behavior, COA sets the position of the best individual in the population as the position of the prey. Meanwhile, it is assumed that half of the individuals approach the prey while the other half wait in place. For the individuals that actively approach the prey (with the index

Here,

Based on this random position

For each individual, if the new fitness function value

1. Escape behavior upon encountering a predator (local search behavior).
The position update strategy in the second stage mimics the escape behavior of raccoons when encountering predators. In this stage, a position

In the formula,

As in stage 1, if the newly calculated position

Improved COA based on elite retention strategy and dynamic weighting factor
The standard COA is prone to getting stuck in local optimal solutions, having low convergence efficiency, and struggling to effectively balance different types of errors when dealing with complex nonlinear optimization problems. These issues limit its application effectiveness in complex optimization scenarios. To address these problems, this study proposes an improved COA based on an elite retention strategy and dynamic weighting factors. By optimizing the mutation mechanism, weight strategy, and search strategy, the performance of the algorithm has been significantly enhanced.
1. Mutation mechanism based on elite retention strategy
The random variation of the standard COA only exists in the random generation process of the prey as described in equations (7) and (10). Its variation mode is single and the result is easy to be ignored, leading to insufficient population diversity and making the algorithm prone to getting stuck in local optimal solutions during the search process. Therefore, this paper’s improved algorithm adopts the mutation strategy of the elite retention selection method. Let

Non-elite individuals undergo random mutations with a noise attenuation mechanism, thereby ensuring population diversity while reducing the damage to excellent solutions.

For the new position

Mutation can dynamically adjust the search range through
1. Dynamic logarithmic weighting strategy
To enable the algorithm to handle different types of errors more evenly, the improved algorithm introduces dynamic logarithmic weights to adjust each type of error value. The error formula is as follows:

In the formula,

Equation (16) obtains

Improving the process of solving the kinematic inverse problem using COA
The MD-H model describes the spatial relationship of robot links through joint angles

Here,


Among them, the actual pose
COA process
After all raccoon individuals’ positions in the search space are updated according to the first and second stage rules described in Section “Kinematic modeling of 6-DOF industrial robots,” the mutation is carried out using elitism strategy, and one iteration is completed. Thereafter, the process of updating the population based on equations (5)–(14) will be repeated continuously until the preset maximum number of iterations is reached, and the final optimization result is obtained. To further enhance the algorithm’s efficiency and avoid unnecessary computational waste, an early stopping condition is introduced in COA in this paper. Specifically, after each iteration, it is determined whether the current optimal evaluation fitness value

Improved COA process.
Experiment
For the computational tasks and code execution in this study, the experiments were carried out on a computer featuring a 12th Gen Intel® Core™ i7-12700H processor (2.30 GHz), 40.0 GB of RAM, running Windows 11 Home Chinese Edition (Version 24H2), with Python 3.10 as the programming environment. The ABB industrial robot model used in this article is IRB2600-20/1.65. According to the official documentation, its repeatability accuracy is 0.04 mm. The working range of all joints is shown in Table 2.
Working ranges of each joint of IRB2600-20/1.65.

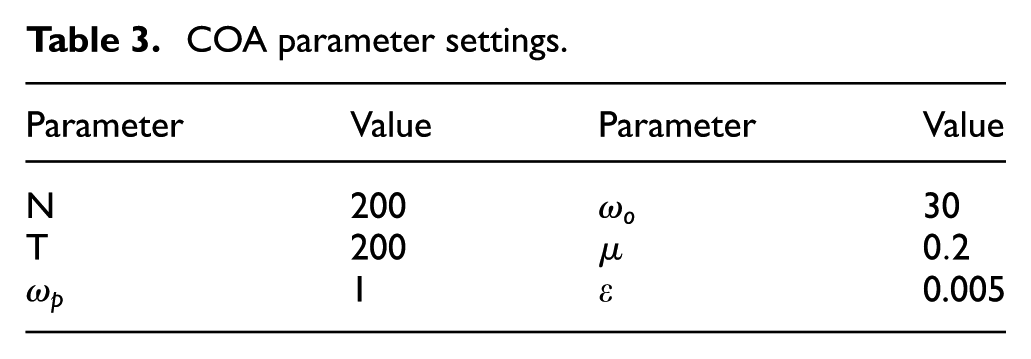
The improved COA parameters set in this paper are shown in Table 3.
COA parameter settings.
The random motion of industrial robots was controlled, and the Cartesian coordinates and Euler angles corresponding to any 10 points were read and recorded. The improved COA was used to calculate the kinematic inverse solution corresponding to each point, and the position error and orientation error corresponding to each set of inverse solutions were calculated. The results show that the improved COA can accurately obtain the kinematic inverse solution of industrial robots. The inverse solution error obtained by the algorithm is small, with position errors all less than 0.003 mm and orientation errors all less than 0.001 rad. These errors are within the allowable error range of the IRB2600 industrial robot. The inverse solution error obtained by this algorithm is small, with position errors all less than 0.005 mm and orientation errors all less than 0.005 rad. These errors are within the allowable error range of the IRB2600 industrial robot and fall within the normal error range of its operation.
For comparison, the algorithm proposed in this paper is compared with WOA, standard COA, PSO, and GA through experiments. The population size, maximum number of iterations, and evaluation function
Results of optimization algorithm.
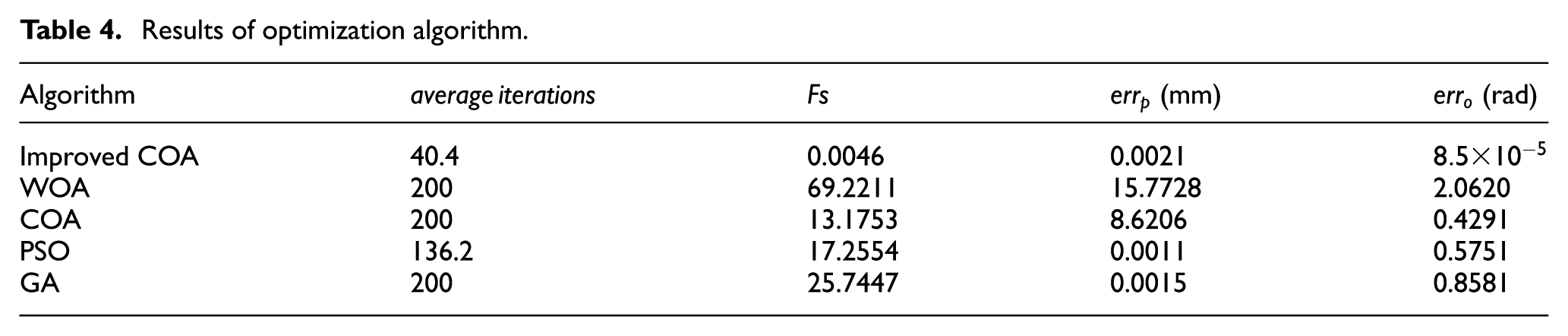
To visually present the performance differences among the five optimization algorithms, the average convergence curves of the algorithms were further plotted. Considering that the improved COA has relatively fewer iterations, after the algorithm’s iteration stops, the minimum

Comparison of iteration effects of five optimization algorithms.
To further verify the robustness of the improved COA algorithm, this paper plots the detailed convergence curves of five algorithms at 10 different spatial points (Figure 6), where each point position has undergone 10 independent calculations, and the results are averaged. This figure visually demonstrates the convergence behavior patterns of each algorithm when facing different inverse kinematics solution scenarios. From the analysis of Figure 6, it can be seen that the improved COA shows the characteristics of rapid initial convergence and stable convergence in the later stage at all test points. It can quickly reduce the fitness value within the first 20 iterations, thanks to the synergy of the elite retention strategy and the dynamic weight mechanism, enabling the algorithm to identify and search toward the optimal solution, and eventually converge below the threshold to meet the truncation condition. In contrast, the other algorithms, although converging rapidly in the initial stage, are prone to getting stuck in local optima, showing convergence stagnation at some test points and unstable final convergence accuracy.

The iterative curves of five algorithms at 10 points: (a) Improved COA, (b) WOA, (c) COA, (d) PSO, and (e) GA.
Conclusion
This paper focuses on the inverse kinematics problem of 6-DOF industrial robots, taking the ABB IRB2600 industrial robot as the research object. An MD-H kinematic model is constructed and an inverse kinematics solution method based on the improved COA is proposed. By introducing the MD-H model, a transformation matrix with redundant parameters is established to complete the modeling of the transformation relationship of the industrial robot’s link coordinate system. The COA is improved by introducing an elite retention strategy and dynamic weight factors, optimizing the mutation, weight, and search mechanism to enhance the algorithm performance. Experimental results show that the improved COA can effectively obtain the inverse solution, with a position error less than 0.003 mm and an orientation error less than 0.001 rad. In terms of performance indicators such as the number of iterations and the optimal evaluation fitness, it significantly outperforms comparison algorithms such as WOA, standard COA, PSO, and GA, providing a new intelligent algorithm solution for the inverse kinematics problem of 6-DOF industrial robots.
However, it must be admitted that the current algorithm version has limitations in terms of computational efficiency. The actual time consumption is higher than the expected requirements of the application. This is mainly due to the complexity of the iterative update rules, the high dimensionality of the intermediate variables, and the computational burden brought by the comprehensive evaluation mechanism. In actual experiments, when individuals in the population are provided with appropriate initial values, the algorithm can achieve satisfactory time efficiency under specific conditions. However, this approach still presents certain limitations in terms of broader applicability, and further optimization of the algorithm’s computational framework will be necessary to enhance its universal performance across diverse operational scenarios. Therefore, in subsequent improvements, we can focus on the multi-algorithm fusion strategy and integrate an optimization algorithm that can quickly obtain initial values. Besides the fusion of algorithms, in the future, we will further optimize the algorithm structure by simplifying redundant iterations and streamlining the population update mechanism to reduce unnecessary fitness evaluations.
Footnotes
Acknowledgements
Funding for this research was provided by Cui Xiangqun’s Academician Studio. GuoshoujingTelescope [the Large Sky Area Multi-Object Fiber Spectroscopic Telescope (LAMOST)] is a National Major Scientific Project built by the Chinese Academy of Sciences. Funding for the project was provided by the National Development and Reform Commission. LAMOST is operated and managed by the National Astronomical Observatories, Chinese Academy of Sciences.
Handling Editor: Guanglei Wu
Author contributions
Rongfeng Chen: Participated in all research processes, including algorithm design, experiments, and manuscript drafting. Zengxiang Zhou: Provided experimental guidance and reviewed the manuscript. Jiacheng Xie, Yingfu Wang: Built the experimental environment and participated in the experimental process. Baolong Chen, Jiahao Zhou: Responsible for literature review and data collation. Yan Wu: Assisted in algorithm optimization and result analysis.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by Cui Xiangqun’s Academician Studio. Additional support was provided by the Anhui Provincial Natural Science Foundation (No. 2408085MA016) and the Anhui Provincial Teaching Research Foundation (No. 2022xghjcB34, No. 2022xsxx251). The Engineering Science Experimental Teaching Center at the University of Science and Technology of China is also acknowledged for providing instruments and laboratory space.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.