
Abstract
Rollover accidents are considered as one of the most dangerous types of traffic collisions. To tackle the challenge of effectively managing objective switching and minimizing rollover risk, this study proposes a novel intelligent suspension control method that integrates a dynamic Bayesian network with T-S Fuzzy Membership (DBNFM). The Class-Attribute Contingency Coefficient (CACC) method is utilized to create a validated dataset for DBNFM rollover probability calculations. Based on varying rollover probabilities, the control objective can be specifically tailored towards enhancing ride comfort or anti-rollover stability through unique probability-related membership and robust control design approaches. Additionally, this innovative hybrid suspension control system is integrated into the vehicle trajectory planning process to enable more aggressive and urgent path adjustments. Simulation-based validation comprehensively demonstrates the method’s capabilities in enhancing roll stability and optimizing ride comfort. The car body roll angle of DBNFM is suppressed by 20% compared to passive suspension in double lane change condition. Meanwhile, DBNFM is capable of reducing body vertical acceleration to below 1 m/s2, resulting in a 50% decrease compared to optimal control and offering a highly efficient planning trajectory. These advancements establish a unified control paradigm that effectively balances the conflicting demands of comfort-oriented and stability-critical operational modes.
Introduction
In the “Global status report on road safety 2023” released by WHO, it was reported that a staggering 1.19 million individuals lost their lives in road traffic accidents within a single year, with vehicle rollover accidents accounting for one-fifth of all fatal crashes.1,2 The role of automobile suspension is crucial in determining the vehicle’s body attitude to prevent rollover. Nevertheless, its performance is inherently constrained in emergency and hazardous steering scenarios. Rollover incidents stemming from curvilinear motion are recognized as a prevalent factor with significant repercussions.
Previous studies on intelligent chassis have consistently shown that the integration of various advanced chassis control technologies can significantly enhance anti-rollover stability and improve vehicle performance.3,4 Active suspension, one of the most widely employed intelligent chassis technologies, is renowned for its highly efficient vertical force adjustment capabilities. It distinguishes itself from the anti-roll bar by applying opposing forces on both the sprung mass and unsprung mass while maintaining control stability. 5 To improve roll stability, the optimization of overall performance through a weight coefficient matrix or in conjunction with other active control mechanisms such as steering and braking has been extensively investigated.6–8 The control system designed for comprehensive performance, however, requires further enhancement to ensure stability and precision.
The key task in addressing the varying emphasis on control under different running conditions is to identify a suitable indicator for quantifying the level of vehicular risk. The Load Transfer Ratio (LTR) is widely recognized as a convenient and commonly used indicator for characterizing the rollover state. Robertson utilized a linear correlation between the desired tilt angle and lateral acceleration for narrow tilting vehicles, while also determining the corresponding reserve moment based on LTR methodology.9,10 Moreover, LTR is employed by other indices to calculate additional metrics such as the Dynamic Stability Factor (DSF), Time to Roll (TTR), and Mass Center Position (MCP).11–13 Zhang’s study introduced the contour line of load transfer ratio (CL-LTR) and the CL-LTR-based vehicle rollover index (CLRI), presenting an innovative approach that integrates rollover dynamics into phase plane analysis to provide a precise assessment of rollover risk. 14 To alleviate the intricacy of the analytical model, alternative data-driven prediction techniques, such as recurrent neural networks, offer innovative and precise approaches for rollover prediction.15,16 In emergency situations, the anti-rollover controller is activated when the index value exceeds a predetermined threshold, effectively returning the vehicle to a safe state.
Regarding the purpose of vehicle state prediction mentioned earlier, DBN plays a crucial role in obtaining precise estimation results. While not commonly used as a direct control method in automotive control, it is frequently employed in state estimation and pattern recognition processes across various transportation and vehicle engineering fields. 17 Sun et al. 18 proposed a cost-effective method for tire force measurement utilizing in-tire acceleration data and Bayesian Neural Network (BNN), while Yang employed Dynamic Bayesian Network (DBN) and Long Short-Term Memory (LSTM) network to analyze bystanders’ driving behavior and establish the MPC objective constraint function. 19 Abdulrashid et al. 20 utilized Bayesian dynamic conditional imputation to address missing records and analyze the significance and interrelation of risk factors on injury severity. Nevertheless, a constraint of the dynamic Bayesian network utilized in continuous vehicle state estimation lies in the accuracy attributes of the discretization algorithm. Tsai and Lee have proposed a static, global, incremental, supervised, and top-down discretization algorithm based on the Class-Attribute Contingency Coefficient (CACC) to address this issue. Notably, the algorithm demonstrates promising results in terms of key calculation timing efficiency alongside high precision in discretization. 21
In the event of a sudden production or transfer of control force, the system may encounter an unstable and abrupt external input leading to chattering and compromising the effectiveness of control. The critical technique involves achieving a smooth transition of control methods once the system state exceeds a predefined threshold. Currently, most approaches utilize an index as a threshold to trigger alternative control methods for transitioning to another control objective.22,23 Meral’s research introduces two interval type-2 fuzzy logic controllers that have been optimized to improve both ride comfort and road holding performance. 24 The proposed methodology relies on the utilization of a well-designed transition fuzzy member region and a switchable control setup tailored to different conditions. Due to its flexible parameterization and robust modeling capabilities, the T-S fuzzy method is widely recognized as a potent tool for control-oriented modeling. Li’s research focuses on developing a fuzzy H-infinity controller for uncertain active suspension systems with actuator delay using the Takagi-Sugeno (T-S) model approach. 25 The design of the fuzzy H-infinity controller aims to ensure asymptotic stability and H-infinity performance of the resulting T-S fuzzy system, while simultaneously satisfying constraint requirements. This approach is typically grounded in robust system theory and addresses robust conditions within the context of vehicle performance constraints. Wen employs a T-S fuzzy approach to model the varying masses in order to describe the prescribed non-linear system and achieve the design targets through sector nonlinearity. 26 Another effective approach for achieving seamless and stable control switching is by enhancing the suspension structure, such as implementing a coupled hydraulically interconnected suspension system.27,28 The sudden fluctuations in air suspension force are effectively attenuated by the smooth flow of hydraulic oil between each hydraulic chamber at every corner. Nevertheless, to align with the objectives of stability analysis and control transition, a holistic approach that takes into account both aspects should be proposed to enhance control performance.
The hybrid control, a specialized control methodology that has attracted considerable attention in recent years, aims to achieve smooth and seamless control by integrating various control techniques.29–31 One type of control mechanism is the hybrid triggered scheme, in which a fuzzy approach is utilized to assign weights to a series of linear subsystems and implement control switching based on various triggering conditions.32,33 In Ayman’s study, the hybrid concept is seamlessly integrated into a control-oriented model of a quarter car semi-active suspension system, effectively improving both ride comfort and road-holding performance. 34 The mixed logical dynamical (MLD) systems framework is also utilized to construct the hybrid model of the system, with the objective of optimizing the switching sequences of damping modes while taking into account the suspension performance requirements. 35 While this hybrid control method successfully achieves the objective of control switching through a combination of controlling and modeling processes, it is imperative to thoroughly assess and validate the overall stability of this hybrid system.
Given the limited research on optimizing active suspension performance for trajectory planning, especially in emergency lane changing scenarios, this paper proposes a DBNFM-based anti-rollover control to enhance trajectory planning. The subsequent sections of this article are structured as follows: The DBN based rollover probability prediction section outlines the development of a novel DBN based rollover prediction method; The DBNFM integrated robust control section introduces the design of a controller that integrates the DBNFM and robust control strategy; Trajectory planning with active suspension section combines vehicle attitude adjustment through active suspension control with MPC trajectory planning; A simulation case study is presented in the case study section, followed by concluding remarks in the end. The research flow chart can be found in Figure 1.
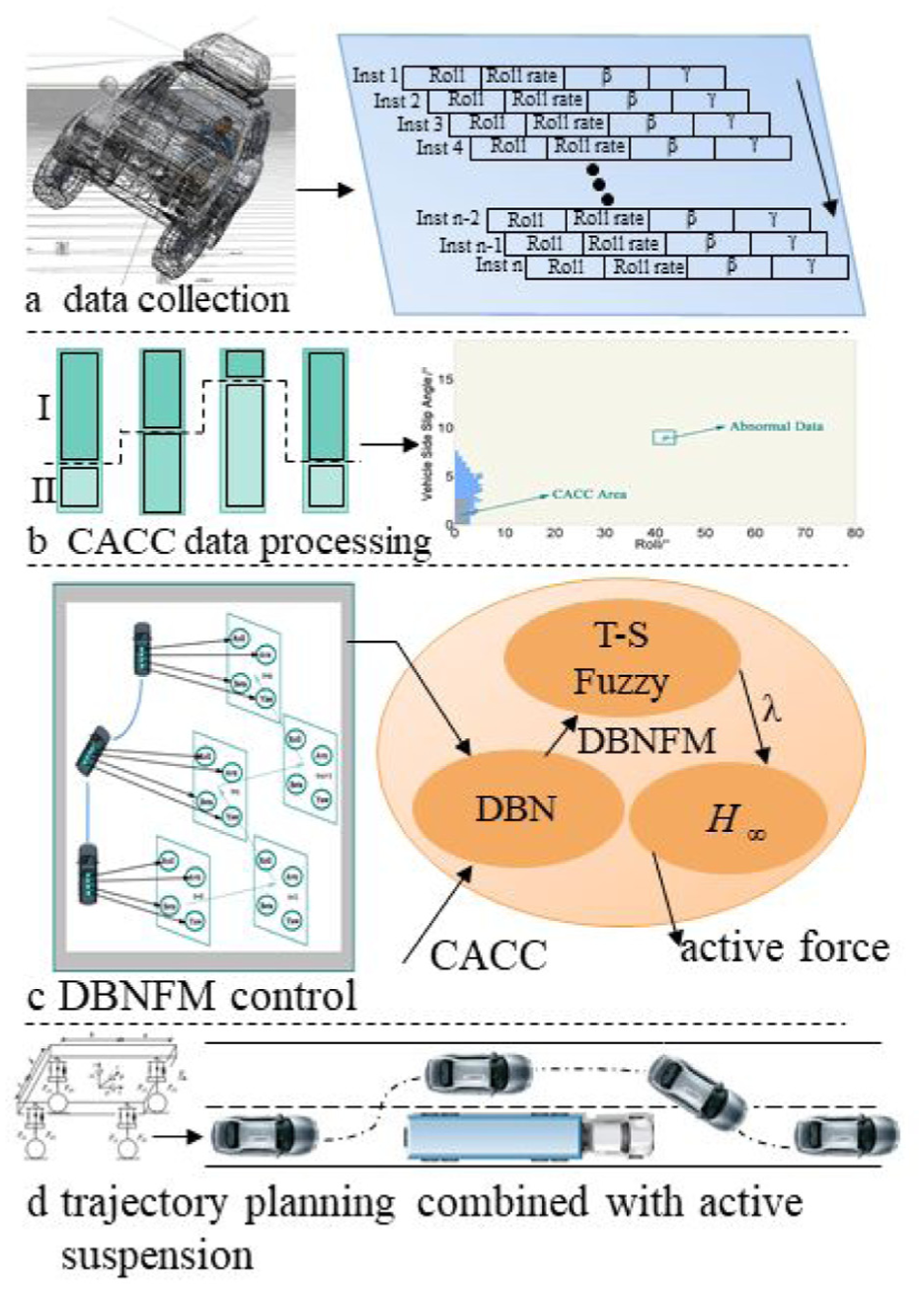
Technical solution of this research.
DBN based rollover probability prediction
During emergency evasion maneuvers, a standard driving protocol dictates that the steering wheel should be turned sharply in one direction. Upon detecting instability, the driver must quickly counter-steer, creating a local trajectory resembling an ‘S’ shape. The underlying assumption suggests that in a typical maneuver, the majority of drivers are likely to adopt this operational approach, potentially leading to vehicle rollover if excessive reverse steering is utilized. Subsequently, the emergency evasion process can be illustrated as shown in Figure 2. The left bottom area depicted in the illustration signifies a secure obstacle avoidance procedure executed by the vehicle. Nevertheless, if the roll angle, roll rate, or vehicle slip angle surpass safety thresholds at any given moment, rollover becomes an inevitable outcome for the automobile.

Diverse safety zone delineations during emergency evacuation procedures.
The continuous attribute values are discretized using the Class Attribute Contingency Coefficient (CACC) method, known for its high classification accuracy and efficient execution time. 21 The algorithm can be succinctly described as an iterative procedure denoted by equation (1).
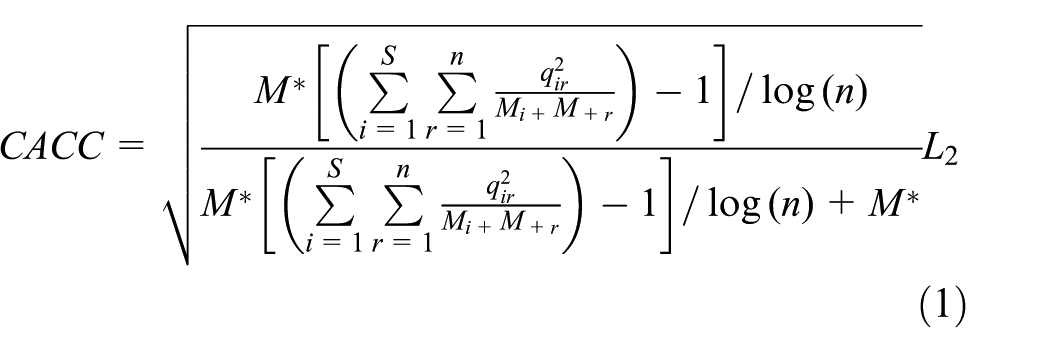
where
Discretization result of CACC.

By utilizing the CACC approach, the discretized attributes can be grouped together to construct the DBN probability network. In relation to evasion scenarios, the vehicle’s previous running state, such as side slip angle and yaw rate, directly influences its motion state in subsequent time segments. The core algorithm is to calculate the conditional probability as
To predict the probability of vehicle rollover, the DBN can be translated as

Additionally, based on DBN probability estimation derived from various vehicle running states, 16 points are strategically distributed along the curves to generate 16 possibilities of membership probabilities, as illustrated in Table 2. In the table, Prob means the predicted rollover probability.
Projection rules between weight and rollover probability.

As previously mentioned, the discretized classification by CACC yields 16 combinations of projection rules with corresponding rollover probabilities. These finite projection rules offer a comprehensive depiction of all vehicle operating conditions. Depending on specific control objectives, fuzzy membership values can be manually adjusted based on varying rollover probabilities as detailed in subsequent sections.
DBNFM integrated robust control
In order to address the issue of control objective switching based on different vehicle running conditions, the integration of rollover probability with control objectives is proposed. On a straight road, the steering wheel angle demonstrates effective coordination with vehicle speed, leading to a reduced likelihood of rollover. However, as the vehicle approaches a corner or encounters an obstacle avoidance situation, the probability of rollover significantly escalates. Motivated by this phenomenon, a dynamic Bayesian network fuzzy membership (DBNFM) merged robust control is proposed to leverage the benefits of T-S Fuzzy algorithm.
Seamless switching algorithm for control objectives using T-S fuzzy method
The primary challenge in this novel active suspension system lies in the integration of rollover predictive parameters and control algorithms. To leverage the benefits of DBNFM, a fuzzy variable λ is utilized to construct a control objective matrix as shown in equation (3).

where
The T-S fuzzy controller is widely acknowledged for its capability in effectively managing continuous variations in control parameters. In order to design a robust, accurate, and continuous controller that can prevent rollover accidents, the probability projection rule presented in Table 2 can be transformed into a T-S fuzzy membership function as illustrated in Figure 3. For the control objectives established in this study, two fuzzy sets have been chosen and their fuzzy membership functions designed based on rollover probability. It is clear that the horizontal axis corresponds directly to rollover probability, while the vertical axis represents fuzzy membership values used to describe output force.

The dynamic Bayesian network fuzzy membership (DBNFM).
DBNFM based anti-rollover robust control
Then, a

where

where

Full-car structure with active suspension mechanism.
Reformulating the relationship between the fuzzy variable and the control objective as a set of fuzzy rules, robust control strategies inspired by two distinct suspension modes, supportive mode and ride comfort mode, are intricately developed. Subsequently, these two modes are integrated with two fuzzy variables
Model Rule 1:
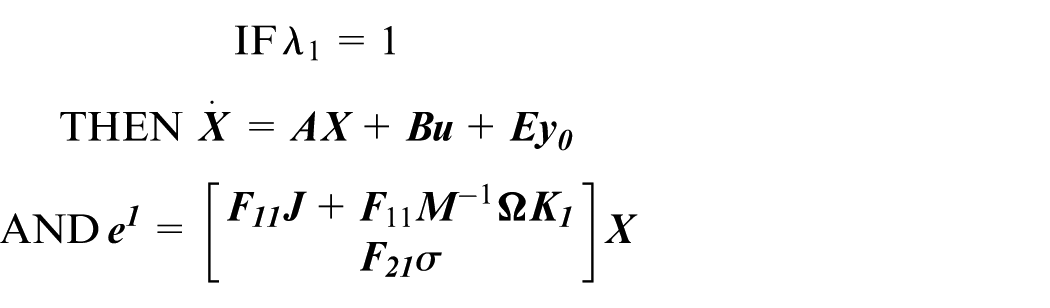
Where,

Model Rule 2:

Where,
On the other hand, a

where
Differentiate the Lyapunov function,

where

where
Let the first term of the right part as

Then add

When the initial condition

Suppose that the road input is bounded and the upper limit is

Similarly, during emergency maneuvers, the control objective must shift from ride comfort to suppressing body roll motion. The constraint can be formulated as follows:

Then

where

where
In conjunction with the DBNFM illustrated in Figure 3, the rollover probability can be utilized in the fuzzy membership value

By employing this robust DBNFM control, the vehicle’s attitude can be effectively maintained, particularly in situations with a high rollover probability. This advantage enhances the efficiency of trajectory planning processes, including vehicle speed and lane changing time.
Trajectory planning with active suspension
Considering that the active suspension optimizes the contact force between the wheel and the road by adjusting the vertical force, thereby altering the body attitude, it simultaneously enhances the lateral movement limit of the vehicle under extreme conditions. In order to realize the trajectory planning, equation (17) adopted four variables
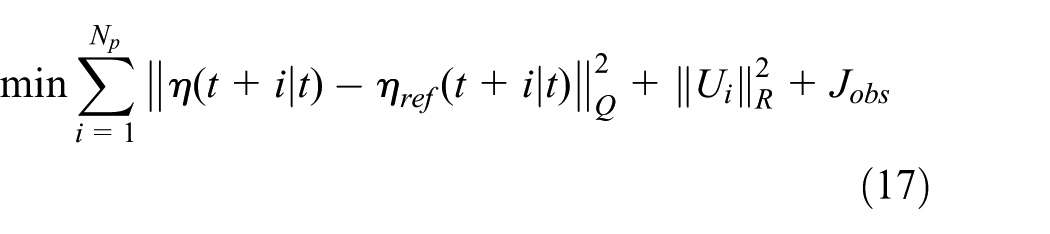

The control input

where
By utilizing the fmincon® math function in Matlab®, real-time trajectory planning results can be obtained. It is crucial that the control input in the rolling optimization process can be derived from the commonly used Model Predictive Control (MPC), as described in Kai et al., 36 which falls outside the scope of this study.
Case study
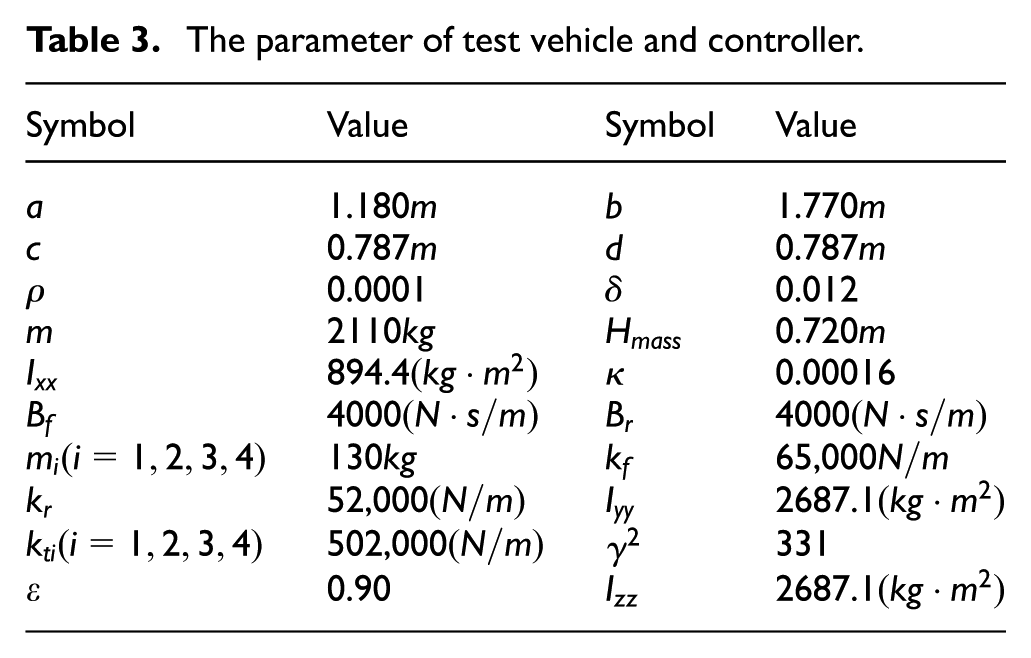
The novel DBN and T-S fuzzy membership-based anti-rollover active suspension control proposed in this section, along with its associated trajectory planning impact, is validated through a co-simulation method involving SIMULINK and CARSIM. The simulation parameters of the test vehicle are detailed in Table 3.
The parameter of test vehicle and controller.
The double-lane-change operation is utilized as the primary test condition to assess the anti-roll performance of the active suspension system. The object trajectory follows a standard double lane change process, with the steering wheel initially veering to the left and then swiftly adjusting towards the right to avoid collision with the obstacle. The passive suspension system demonstrates a clear transfer of contact force from the road to the tire, resulting in a noticeable reduction in tire force and inducing a destabilizing tilt on the left side of the vehicle. In contrast, active suspension systems ensure a consistent and stable tire-road contact force for each individual active suspension. The minimum tire-road forces are greater than 3000 N and 1500 N corresponding to optimal and DBNFM control, respectively, which exhibit higher stability compared to passive suspension (1000 N) as shown in Figure 5(a) to (c).

Tire-road interaction force: (a) passive suspension, (b) optimal control, and (c) DBNFM control.
To investigate the predictive outcome of the dynamic Bayesian network, we have developed a more intense and intricate lane change profile including various emergency lane changing. During this process, the lateral offset has been redesigned to approach the rollover limit and acquire changing rollover probability. Throughout the entire lane changing procedure, Figure 6(a) to (c) illustrates the probability estimated by DBN. The correlation between rollover probability and roll angle is explicitly demonstrated in both passive and active suspension systems. In the case of passive suspension, the roll angle reaches approximately five degrees at certain critical points, leading to a near-certain rollover probability within a short duration. Regarding active suspension, under identical conditions, the car body roll angle of DBNFM is suppressed by less than 4° and reduced by 20% compared to passive suspension. The occurrence frequency of large rollover probability is significantly reduced compared to passive suspension. It can be inferred from the results that, due to the established control objectives, the optimal control exhibits superior roll angle suppression effects and outperforms DBNFM control.
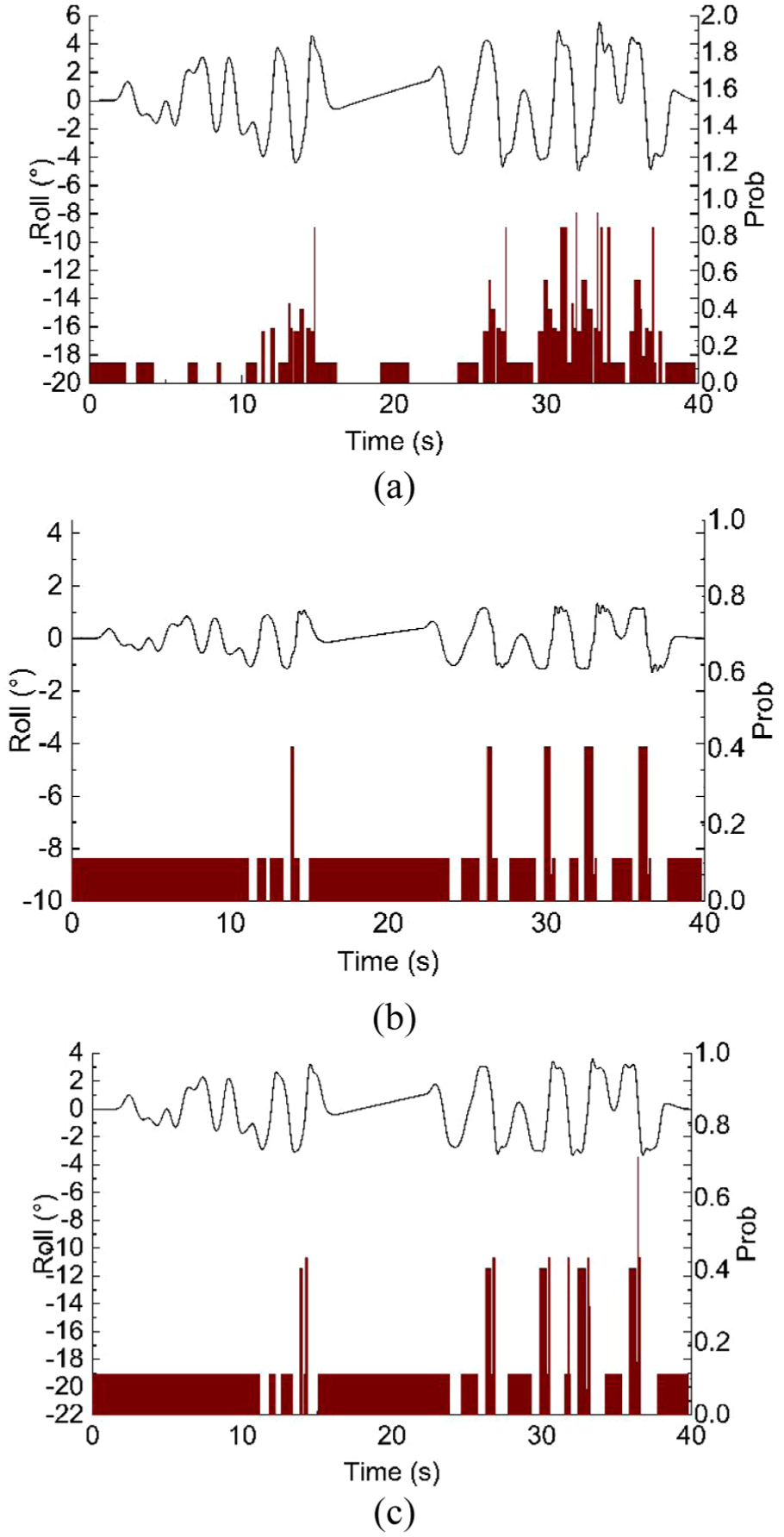
Corresponding rollover responses: (a) passive suspension, (b) optimal control, and (c) DBNFM control.
Figure 7 also presents the vehicle parameters and rollover risk levels, illustrating the relationship between rollover probability and the vehicle’s operation condition. The low risk is represented by the colors red and green, while the hazardous state is indicated by the color blue in terms of risk extent. It is evident that the passive suspension system exhibits a significantly higher proportion of states depicted in blue compared to the active suspension system. The passive suspension plot reveals an intriguing phenomenon: the rollover probability exhibits a positive correlation with roll angle and a negative correlation with yaw angle. This phenomenon can be attributed to the fact that larger yaw angles are more susceptible to side slip rather than rollover. Consequently, effective management of roll posture is essential for reducing the probability of rollover in vehicles through slight yaw adjustments.
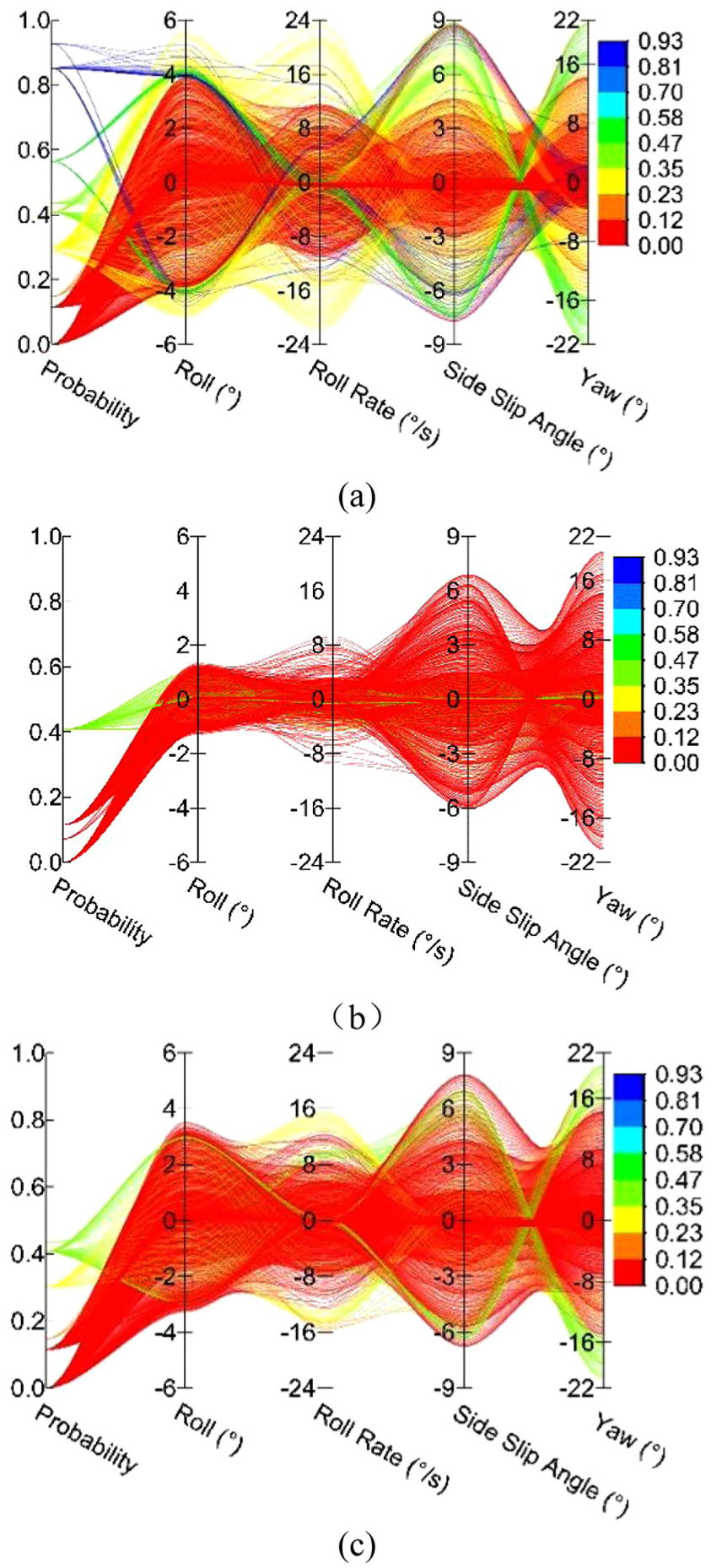
Rollover probability and vehicle running state parameter: (a) passive suspension, (b) optimal control, and (c) DBNFM control.
To find the correlation between rollover probability and anti-roll stability controlled by active suspension, comparative experiments were conducted using different velocities and steering wheel angles to observe the body response. In this scenario, a steering wheel rotation of 720° in 1 s was set, and the velocity was varied at 30 km/h, 40 km/h, 50 km/h, and 60 km/h. Figure 8(a) illustrates the variations in roll angle for different suspensions at various speeds. As a result of the controller configuration, the multi-objective optimal active suspension system demonstrates minimal roll angle, while the performance of dynamic Bayesian network fuzzy membership (DBNFM) based robust control falls within a range between that of three different suspension types. As the speed varies from 30 km/h to 60 km/h, there is negligible change in roll angle for each specific suspension type. Conversely, the discrepancy between front and rear axle side slip angles serves as a distinguishing characteristic indicating steering behavior. The difference value of front and rear side slip angle

Response of vehicle in steady state circular driving: (a) roll angle of different suspensions and (b) front and rear axle side slip angle difference value.
In order to investigate the vehicle response under hazardous operating conditions, the speed was increased to 120 km/h to analyze its trajectory tracking characteristics. The results of the running trajectory and rollover probability are illustrated in Figure 9. An uncontrollable region is observed at the end of the trajectory in the shade for passive suspension, resulting in potential vehicle skidding off the track. Despite the increased velocity, vehicles equipped with active suspension systems exhibit precise adherence to the designated trajectory and maintain stable tracking throughout the entire test. It is solely due to the active suspension function that enables the vehicle to effectively follow more challenging trajectories, even in scenarios with limited initial distance.

Trajectory and rollover probability: (a) passive suspension and (b) active suspension.
Likewise, the severity of steering can also influence the vehicle’s dynamic behavior and steering characteristics. In order to explore the limits of optimal suspension and DBNFM-based active suspension, a stable steering test was conducted with four different designed steering angles: 20°, 90°, 180°, and 240° as peak angles. The test results for various suspensions are presented in Figure 10 to facilitate clear comparisons. The roll angles of 90° and 240° are plotted on the horizontal axis, while 20° and 180° are represented on the vertical axis. It is evident that both types of active suspensions effectively mitigate roll angle and prevent vehicle rollover during aggressive steering maneuvers. As previously mentioned, the optimal control outperforms DBNFM-based active suspension in terms of vehicle roll angle. Moreover, Figure 10 illustrates the comparison of steering radius under various conditions. As the angle of the steering wheel increases, there is a noticeable reduction in the steering diameter, which corresponds with intuitive expectations. When comparing control methods, it fundamentally indicates that optimal control leads to smaller steering diameters for both slow and sharp steering. As the test was conducted consistently at a speed of 40 km/h, the DBNFM-based suspension exhibited a more prominent understeering characteristic
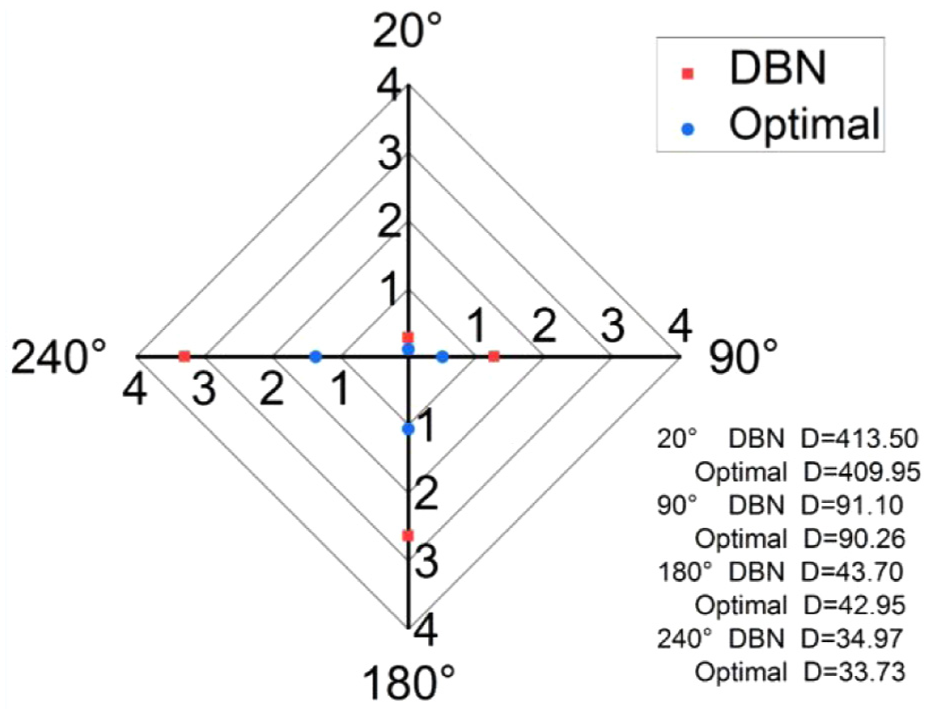
Roll angle and steering diameter comparison.
In addition to roll stability, suspension also plays a critical role in ensuring optimal ride comfort. When the vehicle is traveling on a straight road, the active suspension control system should transition its focus from roll stability to prioritizing ride comfort. The road roughness illustrated in Figure 11 is correlated with a relatively low likelihood of rollover, thus enabling a primary emphasis on regulating ride comfort. In this scenario, active suspension can effectively suppress body acceleration below 1 m/s2, albeit resulting in increased dynamic deflection as shown in Figure 12. Given that optimizing ride comfort is the primary control objective, it is evident that the DBNFM-based active suspension system outperforms other alternatives in terms of peak value. Additionally, Figure 12(b) presents a comparison of dynamic deflections between both active suspension systems, with corresponding deflection values indicated along each curve. This exemplifies the effective control object switching of robust control based on DBNFM, with a strategic shift in the control objective from stability management to ride comfort optimization through leveraging DBNFM rollover probability prediction.

Road roughness of both sides.

Ride comfort comparison under designed roughness road: (a) acceleration and (b) dynamic deflection.
Motion planning quality under supervised by active suspension is another interesting and significant issue to consider especially for intelligent vehicle. In the motion planning process, both optimized trajectory selection and precisely trajectory tracking should be taken into consideration. In this process, parameter
Motion planning and trajectory tracking result of DBNFM suspension.
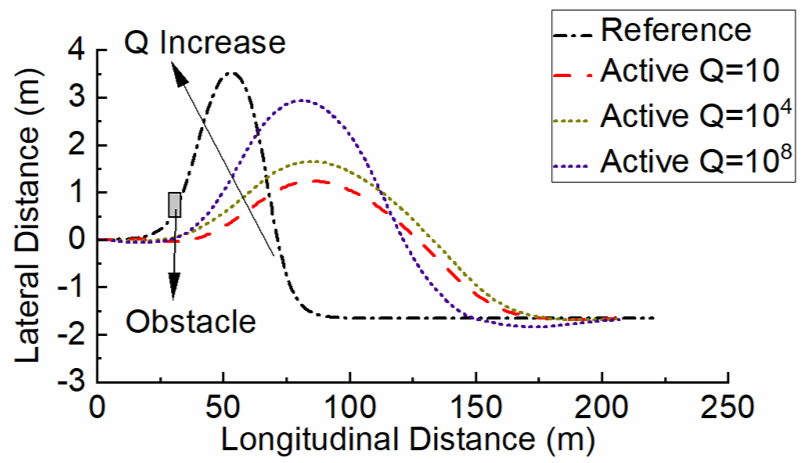
It can be fundamentally demonstrated in Figure 14 that the trajectory deviates from the desired path towards the end of the obstacle avoidance process, leading to loss of control for passive suspension. The reason for this advantage of active suspension lies in the fact that through vertical actuator force control, the tire-road contact condition will be optimized and the coefficient of road adhesion can be utilized to the full extent. On the contrary, it is evident that active suspension systems allow for a more accurate design of planned trajectories in obstacle avoidance scenarios, enabling sharper steering maneuvers to swiftly evade sudden obstacles. To investigate the dynamic evolution process, the roll angle, lateral acceleration, lateral tire-road force, wheel steering angle are collected to make a comprehensive comparison in Figures 15 to 18.
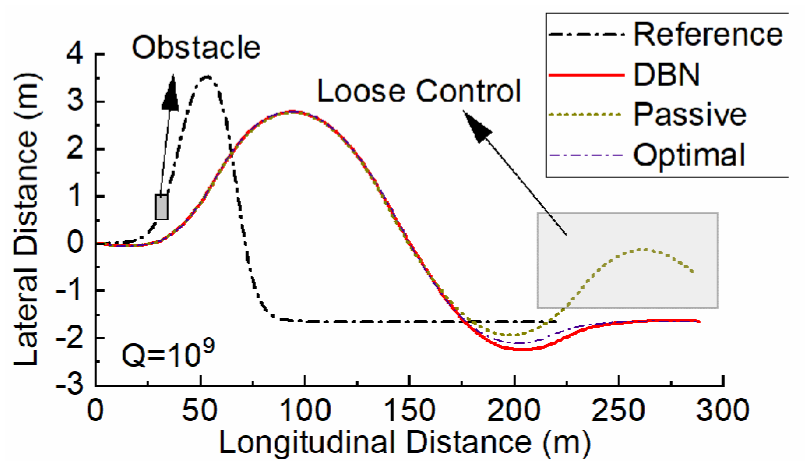
Trajectory planning outcomes for various suspension types.

Roll angle in the trajectory planning process.

Lateral acceleration in the trajectory planning process.

Lateral tire-road force in the trajectory planning process.
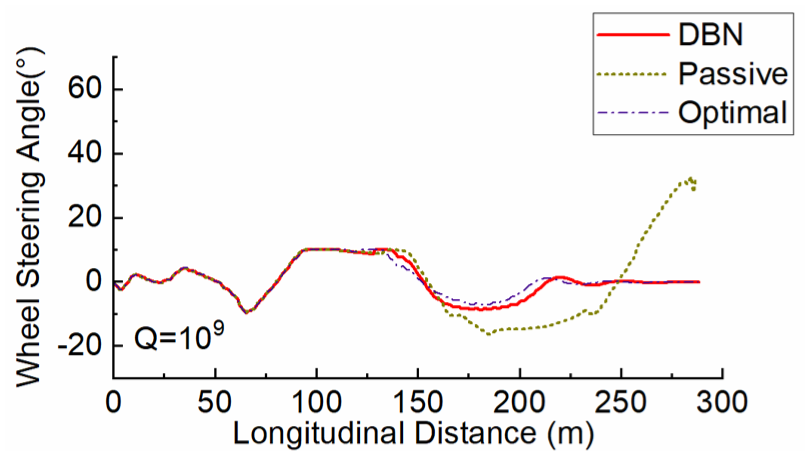
Wheel steering angle in the trajectory planning process.
Figures 15 and 16 illustrate the roll angle and lateral acceleration during the trajectory planning process. The DBNFM and optimal active suspension effectively suppresses the roll angle compared to passive suspension along the trajectory. Moreover, from a lateral force perspective, the active suspension optimally adjusts the vertical force to improve road support stability, thereby reducing rollover risks. It is evident that in the vicinity of a longitudinal distance of 200, vehicle with passive suspension exhibit relatively high lateral acceleration and tire-road force. This phenomenon can be attributed to abrupt fluctuations in tire-road force, resulting in a compromised trajectory tracking ability as illustrated in Figures 17 and 18 at the longitudinal distance of approximately 150 m. To generate the necessary lateral force promptly, it is imperative to increase the steering wheel angle for enhanced lateral force production for passive suspension. In contrast, the active suspension systems with optimal and DBNFM control are capable of maintaining a consistent lateral force and tire-road force, thereby enhancing the stability of the trajectory tracking process.
Conclusion
This study proposes an innovative approach that integrates a dynamic Bayesian network with Fuzzy Membership (DBNFM) to achieve seamless control objective switching based on vehicle operating conditions. Subsequently, the DBNFM presentation is incorporated into the robust control Lyapunov stability proof process. The effects of trajectory planning are examined with the active suspension modification. The key findings from theoretical analysis and simulation validation can be summarized as follows:
(1) By leveraging dynamic Bayesian network, the rollover probability can be estimated based on the values of roll angle, roll rate, side slip angle, and yaw angle. The maximum rollover probability for passive suspension may reach as high as 0.9. With the implementation of active suspension control, the likelihood of vehicle rollover can be decreased to 0.4 under optimal control and to 0.7 with DBNFM control. In double lane change scenarios, the car body roll angle under DBNFM is constrained to <4°, demonstrating a 20% reduction compared to passive suspension systems. Although optimal control can achieve the minimum roll angle and rollover probability, it may result in a maximum vertical acceleration of up to 2 m/s2 compared to 1 m/s2 for DBNFM control. The balanced performance of DBNFM is attributed to the seamless switching of control objectives derived from the fusion of DBN and T-S fuzzy logic. However, due to the limitations of severe rollover experiments, verification methods primarily rely on simulation scenarios. Future research will involve conducting real on-vehicle experiments for more precise validation.
(2) The MPC trajectory planning method is employed to validate the efficacy of active suspension in the trajectory planning and tracking process. Simulation results demonstrate that the precision weight coefficient can be adjusted to closely match the original trajectory without inducing side slip. The passive suspension systems result in significant lateral side slip, leading to a loss of control. Conversely, active suspension systems optimize vertical forces to enhance road support stability and reduce the risk of rollovers from a lateral force perspective. It is evident that in the vicinity of a longitudinal distance of 200 m, vehicles equipped with passive suspension systems demonstrate relatively high lateral acceleration and tire-road forces. This observation can be attributed to sudden fluctuations in tire-road forces, leading to compromised trajectory tracking capabilities at a longitudinal distance of approximately 150 m and requiring significant steering wheel input to compensate for this deficiency. In order to address even more challenging road conditions in trajectory research, further experiments will be conducted to validate the model on low-friction road surfaces for a more comprehensive verification.
Footnotes
Handling Editor: Chenhui Liang
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Program No. 52202463, 52372375); Natural Science Basic Research Program of Shaanxi (Program No. 2022JQ-543, 2025JC-YBMS-539); Fundamental Research Funds for the Central Universities, CHD (Program No. 300102225202); Shaanxi International Science and Technology Cooperation Base (Program No. 2025GH-GHJD-028)
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.