
Abstract
The coupled pump-motor system, characterized by its compact structure and high-power density, is widely used in critical applications such as hydrostatic steering drives for tracked vehicles and variable-speed propulsion for construction machinery. However, external leakage of oil in the piston chamber of the pump-motor system can significantly affect the system’s performance, such as by reducing system efficiency and causing an increase in oil temperature. The external leakage characteristics of the piston chamber are influenced by the coupled effects of the dynamic and thermodynamic behavior of the friction pairs. Based on the concept of mechanism- and data-fusion-driven methodology, this study proposes an algorithm that effectively identifies and quantitatively evaluates the complex relationship between the leakage characteristics of the piston chamber and operational parameters, through the utilization of a centralized parameter model of the pump-motor system and experimental data on its external characteristics. A case study demonstrates that the algorithm can efficiently identify the external leakage coefficient across different operating conditions, with a quadratic function effectively describing the relationship between the leakage coefficient and operating parameters.
Keywords
Introduction
The coupled pump-motor system, which relies on high-pressure oil to transmit power, is characterized by its compact structure, high power density, and convenient stepless speed regulation. These advantages make it widely used in the steering drives and speed changes of heavy vehicles, as well as in other critical applications.1,2 However, during operation, the hydraulic oil within the piston chambers is inevitably subject to leakage through various friction pairs to the housing. This leakage leads to a decrease in the system’s volumetric efficiency and, in severe cases, can result in system failure.3–6 Revealing and quantitatively evaluating the leakage characteristics of the piston chamber can provide crucial support for research involving the identification of leakage faults and the design of tribological pairs.
Many researchers have utilized mechanistic analysis to calculate and predict the leakage behavior of oil in the piston chamber of piston pumps/motors. Some researchers, including Bergada et al., 7 Bensaad et al., 8 Du et al., 9 and Zhao et al., 10 opted to simplify the gaps of friction pairs into constant and uniform fixed gaps. Based on this simplification, the leakage flow rates generated when oil flows through these friction pairs were obtained using analytical methods. Considering the significant influence of operating condition parameters on the thickness and shape of the oil film in friction pairs,11–14 another group of researchers combined rigid body dynamics theory with oil film lubrication theory and developed more complex and sophisticated numerical calculation methods to investigate the leakage characteristics of individual friction pairs, taking into account the dynamic non-uniform variation characteristics of each gap. Haidak et al. 15 developed a thermo-elastohydrodynamic model for the piston/cylinder pair to calculate and analyze its leakage, considering the effect of heat exchange. Yin et al. 16 developed a transient mixed thermo-elastohydrodynamic lubrication model for the slipper/swash plate pair that incorporates asperity contact, elastic deformation, heat transfer, and viscosity-temperature effects. They subsequently analyzed the variation of leakage of the slipper/swash plate pair with the drive shaft angle. Ma et al. 17 proposed a leakage model for the valve plate/cylinder pair based on cylinder dynamics and oil film lubrication dynamics. Then, the researchers analyzed the leakage characteristics of the pair under different operating conditions. Lin et al. 18 proposed a novel method for predicting the degradation of the wear profile of the piston/cylinder pair, which provides strong support for investigating the evolution of leakage in axial piston pumps during their service life.
From a mechanistic perspective, the aforementioned studies, employing sophisticated numerical calculation methods, can facilitate an in-depth understanding of the working principles and leakage characteristics of friction pairs at the microscopic level. However, these methods suffer from high algorithmic complexity and a substantial number of numerical calculations, resulting in low computational efficiency. To address this issue, other researchers have endeavored to develop data-driven approaches for modeling and predicting the leakage characteristics of piston pumps/motors. Chen et al. 19 utilized HP filtering to decompose the leakage of piston pumps, in conjunction with the nonlinear and heteroscedastic trend data obtained after filtering, established an HP-ARIMA-GARCH model based on time-series analysis to forecast leakage variations. Prakash et al. 20 proposed a method for detecting internal leakage in hydraulic pumps by leveraging imbalanced datasets of electrical energy signals of drive motors. Their results indicate that internal leakage can be effectively identified using sophisticated composite multiscale dispersive entropy and sophisticated composite multiscale fuzzy entropy, in conjunction with three statistical indicators. Dong et al. 21 investigated the correlation between the leakage of hydraulic motors in amphibious assault vehicles and various influencing factors, and developed a leakage prediction model using the projection pursuit regression method, yielding satisfactory predictive outcomes. Yi et al. 22 developed a support vector regression model for the leakage of hydraulic motors in amphibious assault vehicles through analysis of the factors that influence the motor’s leakage, thus providing a more reliable basis for scientifically determining the maintenance and overhaul schedules of hydraulic motors.
As mentioned above, the leakage characteristic models developed through data-driven modeling approaches offer enhanced accuracy and computational efficiency. However, due to the lack of comprehensive modeling and analysis of the internal working mechanism of the piston pump/motor, it is challenging to support further tasks such as performance analysis, parameter optimization, fault diagnosis, and control strategy design for the piston pump-motor system.
Addressing the aforementioned issues, this study takes the coupled axial piston pump-motor system as the research object. Based on the mechanism-data fusion-driven methodology, and utilizing both a lumped parameter dynamic model of the pump-motor system and experimental data on its external characteristics, a set of algorithms is proposed to identify and quantify the complex relationship between the leakage characteristic of the oil in the piston chamber and operation parameters. A case study shows that a quadratic function can effectively describe the relationship between the leakage coefficient and operating parameters. Additionally, the identification process significantly enhances the simulation accuracy of the dynamic model, reducing the prediction error of the speed ratio from 5.07% to 0.81%. This study not only reveals the complex coupling relationships between the leakage characteristics of the piston chamber and operational parameters but also provides a high-precision dynamic model that strongly supports system performance analysis, fault diagnosis, and control strategy design.
Research object
Figure 1 illustrates a schematic representation of the coupled piston pump-motor system, which is specifically designed for the hydraulic steering drive of high mobility tracked vehicles. The system is primarily composed of a variable-displacement axial piston pump (1), a fixed-displacement axial piston motor (2), and an array of hydraulic valves. The regulation of motor (2)’s rotation speed and direction is accomplished by modulating the inclination angle and orientation of the swashplate of the variable axial piston pump (1). The small-displacement gear pump (3), the low-pressure relief valve (4), and the check valves (5) and (6) operate in concert to supply oil to the low-pressure lines, thereby compensating for external leakage within the system. The shuttle valve (9), low-pressure relief valve (10), check valve (5), and check valve (6) work together to realize the replacement of a portion of the high-temperature oil in the working circuit with the low-temperature oil from the compensation circuit. This process enables the regulation and maintenance of the oil temperature within the system.
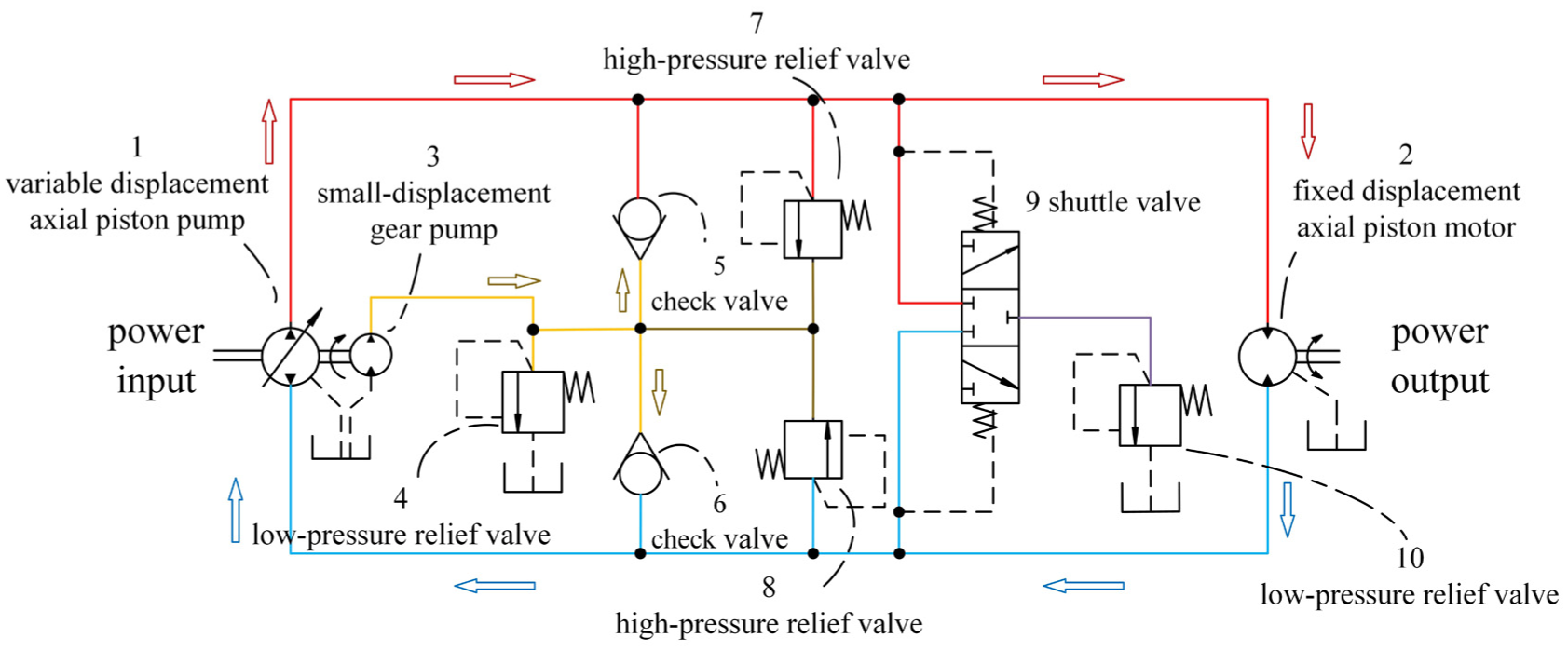
Schematic diagram of the coupled axial piston pump-motor system.
Dynamic model for the pump-motor system
In this article, a dynamic model of the coupled pump-motor system is required to establish the external leakage coefficient identification method. The establishment of this model, along with its validity and correctness, is detailed in Wang et al.23,24 Hence, this article will offer a concise description of the dynamic model rather than an exhaustive review of the modeling process. Based on the centralized parameter method, the coupled pump-motor system is abstracted as a multi-chambered, interconnected hydraulic system. As depicted in Figure 2, the chambers are connected by variable fluid resistance.

Schematic diagram of the centralized parametric model of the coupled pump-motor system.
During the rotation of the cylinders of the piston pump and motor, the piston chambers dynamically connect and disconnect with the high-pressure or low-pressure chambers through valve plates. Taking the connection between the piston chambers and the high-pressure chamber as an illustrative example, the geometrical arrangement enables the calculation of the connection areas between two adjacent piston chambers (named Nos. 1 and 2) and the high-pressure chamber. Based on the geometric relationship, the variation curve of the connection areas between the adjacent Nos. 1 and 2 piston chambers and the high-pressure chamber as a function of the cylinder’s rotation angle can be obtained, as shown in Figure 3. 23
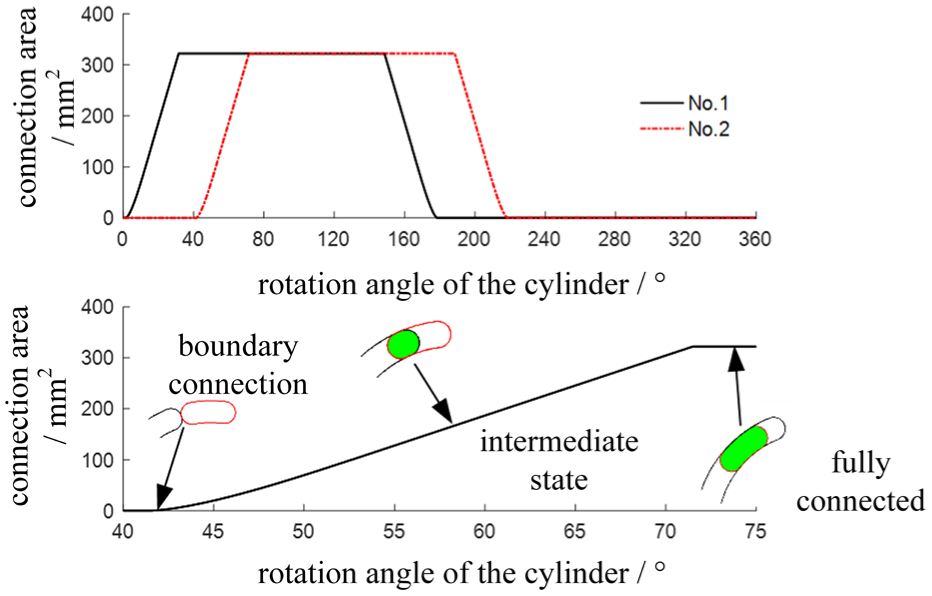
Variation curve of the connection area between the piston chamber and the high-pressure chamber with the rotation angle of the cylinder.
Considering that the oil is compressible, the pressure-building equation for the oil in the piston chambers is:

In equation (1),
Considering that the bulk modulus of the oil significantly affects the dynamic characteristics of the system, the Wylie 25 model is utilized in this model to describe the variation of the oil’s bulk modulus with the pressure and air content rate of the oil. The model is shown in the following equation:

Where β0 is the bulk modulus of pure hydraulic oil at atmospheric pressure, c is the air content of the oil, p0 is one standard atmospheric pressure, and λ is the heat capacity ratio of air. In the Wylie model, the variation trend of the bulk modulus of the oil with pressure is shown in Figure 4.

Calculation results of Wylie model for bulk modulus of oil. 23
With the pump running at 1000 r/min, Figure 5 compares the high-pressure ripple predicted by the lumped-parameter model with the corresponding experimental measurements at operating pressures of 20 and 40 MPa. It can be observed that the lumped-parameter model employed here can effectively simulate the high-frequency varying pressure characteristics inside the piston pump–motor system and accurately represent its overall dynamic behavior.

The comparison between the simulation results and the test results. (a) p H = 20 MPa and (b) p H = 40 MPa.
Identification algorithm for the external leakage coefficient
Description of the issue
As shown in Figure 6, the oil in the piston chamber simultaneously leaks outward through the piston/cylinder pair, the slipper/swash plate pair, the valve plate/cylinder pair, and the spherical bearing pair. In various studies, researchers employed a leakage coefficient to characterize the leakage characteristics of piston pumps or piston motors.26–29 Following this idea, an external leakage coefficient is defined here to comprehensively characterize the overall leakage characteristics of the oil in the piston chamber as it flows through the above friction pairs, as shown in the following equation:

Where

Leakage channels of oil in the piston chamber.
It has been shown that the leakage characteristics of all types of hydraulic pumps/motors are significantly influenced by the system’s working parameters. 30 For piston pumps and piston motors, the leakage in the piston chamber is inherently a complex coupled problem involving fluid dynamics and thermodynamics, mainly affected by the combined effects of rotation speed, operating pressure, and oil temperature. Among these, rotation speed affects leakage through mechanisms such as shear rate in the oil film, hydrodynamic effects, and centrifugal effects. Operating pressure directly drives leakage via pressure differentials and indirectly influences it by inducing elastic deformation in friction pairs. Oil temperature impacts leakage through two main pathways: altering oil viscosity and causing thermal deformation of friction pairs. These three factors do not act independently; rather, they exhibit significant synergistic interactions. For instance, under high-pressure, high-temperature, and high-speed conditions, elevated temperature reduces oil viscosity, high pressure exacerbates deformation of friction pairs, and high speed increases the shear rate of the oil film. The combined action of these factors leads to a nonlinear, sharp increase in leakage within the friction pairs.
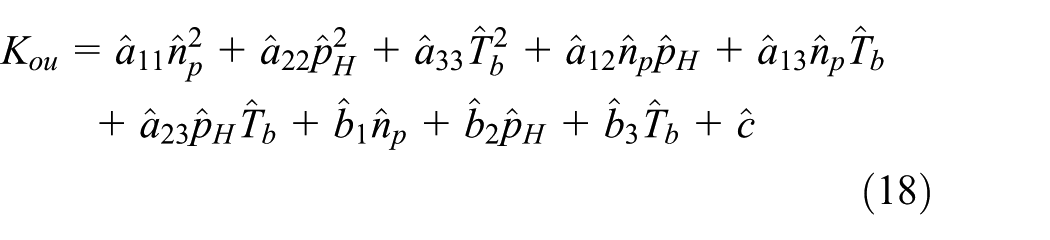
Therefore, considering that leakage in the piston chamber is a complex process influenced by the combined effects of rotation speed, pressure, and oil temperature, it is further assumed that the external leakage coefficient of the piston chambers is a quadratic function of the pump’s rotation speed n p , working high pressure p H , and the temperature of the compensated oil T b , as shown below:

Physically, each term of this quadratic function has a clear physical meaning: the quadratic terms (
It should be noted that the dynamic model employed in this article only considers the external leakage characteristics of the oil in piston chambers as it flows through each friction pair, without taking into account the external leakage flow of the working oil inside the system as it flows through gaps in the valve groups and other links. However, considering that the external leakage flow from the piston chambers accounts for the vast majority of the total external leakage, and the external leakage flow from the remaining links constitutes a negligible proportion,27,28 it therefore does not significantly affect the research results.
Identification of the leakage coefficient under a certain operating condition
Analysis of the impact of leakage on the external characteristic of pump-motor system
As previously discussed, the leakage characteristics of the piston chamber exhibit a complex relationship with operational parameters. However, directly measuring the external leakage characteristics of the piston chamber under different operating conditions is highly challenging. Considering that the leakage in the piston chamber directly affects the volumetric efficiency of the pump-motor system and consequently influences the output speed of the motor, a comparative analysis of the dynamic response process of the motor’s rotation speed under both leakage and non-leakage conditions is further conducted. Figure 7 shows a comparison of the step response process of the motor rotation speed when the pump rotation speed is 2000 r/min, the motor load is 1671 N m, and the swash plate is subjected to a step input to the maximum tilt angle, under both leakage and non-leakage conditions. It can be observed from the figure that the actual leakage has a significant impact on the dynamic response process of the motor rotation speed. First, the leakage markedly reduces the oscillation amplitude of the motor rotation speed and shortens the settling time. This is because the actual leakage in the piston chamber provides a path for energy dissipation, increases the system damping, and reduces the system stiffness, thereby enhancing system stability. Second, the actual leakage significantly decreases the steady-state rotation speed of the motor, reducing it from 1922 to 1803 r/min. This is because actual leaks reduce the volumetric efficiency of the system.

Step response of motor rotation speed.
Figure 8 further presents the variation curve of the speed ratio with respect to the operating high pressure under two conditions: with and without leakage of the piston chamber, at a pump rotation speed of 2000 r/min. The rotation speed ratio is defined as the ratio of the motor rotation speed to the pump rotation speed when the pump operates at its maximum displacement. It is observed that not only does leakage lead to a loss in the rotation speed ratio, but the compressibility of the hydraulic oil also results in a significant decrease in the rotation speed ratio. Moreover, as the operating pressure increases, the losses in the rotation speed ratio caused by both oil leakage and compressibility become more pronounced. Specifically, when the operating pressure rises from 25 to 45 MPa, the rotation speed ratio loss due to oil compressibility increases from 2.54% to 4.91%, while the loss attributable to oil leakage increases from 3.67% to 6.39%.

Steady-state rotation speed ratios under different pressures.
Algorithm for identifying the external leakage coefficient under a specific operating condition
In this section, the external leakage characteristic of the piston chamber will be inversely identified by monitoring the rotation speed ratio of the system under different operating conditions, taking into account the compressibility of the oil. Under specific operating condition parameters, a single-valued functional relationship exists between the speed ratio and the external leakage coefficient K ou . Consequently, once the operating condition parameters are determined, the dynamic model of the pump-motor system can be treated as a nonlinear function f, with the leakage coefficient K ou as the input and the model-predicted speed ratio as the output. This can be expressed as:

Therefore, the problem of identifying the external leakage coefficient K
ou
of the piston chambers at a certain operating condition point can be transformed into a parameter adjustment issue. The goal is to make the rotation speed ratio predicted by the dynamic model as close as possible to the measured rotation speed

Based on equations (5) and (6), it can be seen that given a specific value for K ou , the value of ψ(K ou ) can be obtained by invoking the dynamic model of the pump-motor system. Thus, the identification problem for K ou can then be further reduced to the root-finding problem of the nonlinear equation ψ(K ou ) = 0. The secant method is utilized here to solve the nonlinear equation ψ(K ou ) = 0. The iteration format is as follows:

Substituting equations (6) into (7), there is:

In the process of calculating the external leakage coefficient of the piston chambers using equation (8), an initial search interval for the leakage coefficient, denoted as [K ou ,0, K ou ,1], is first established. Subsequently, the dynamic model is invoked to compute the rotation speed ratios, denoted as [ratio0, ratio1]. Then, equation (8) is used to iteratively calculate the leakage coefficient K ou ,2 in the next step.
Following this, the dynamic model is invoked again to calculate the ratio2, and equation (8) is used once more to iteratively compute K
ou
,3. By continuously repeating this process, the iterative sequence {Kou, n} can be obtained. This sequence {Kou, n} will converge to the true root of the nonlinear equation ψ(K
ou
) = 0, which is the actual leakage coefficient

Where m is the operating condition number. Taking ψ(K
ou
) < ε as the stopping condition, when the deviation of the predicted rotation speed ratio by the model from the measured rotation speed ratio is less than the given tolerance limit ε, the iterative operation is stopped and the value of
Identification of the undetermined parameters in the function of the external leakage coefficient
Using the method described in the above section, for N test operating conditions
Based on the idea of the least squares method, the cumulative sum of squares of the deviation of

The smaller the value of the evaluation function f (a
ij
, b
i
, c), the better the approximation of the function

For the sake of derivation, replace

Substituting equations (12) into (10), the following equation is obtained:

Substituting equations (13) into (11), the following equation is obtained:
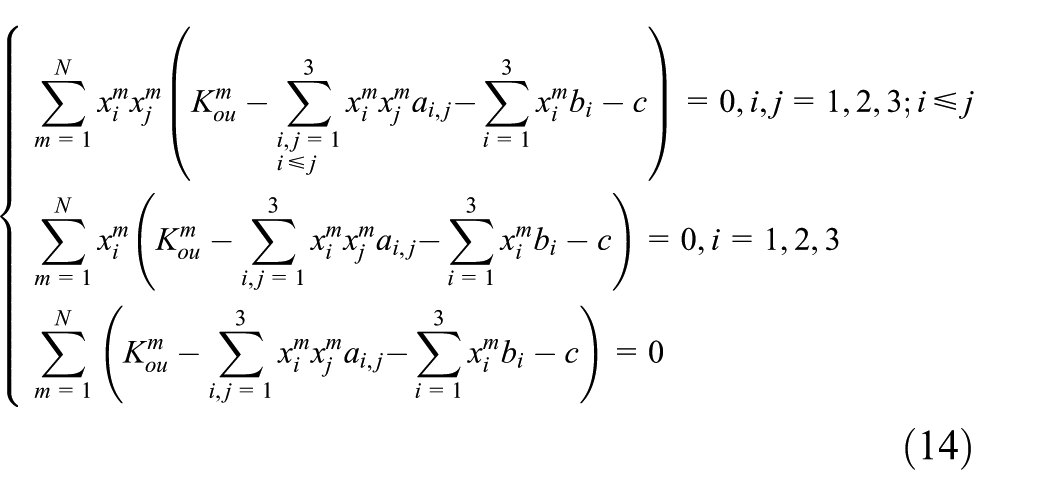
Equation (14) is a system of multivariate linear equations containing 10 undetermined coefficients
However, it should be noted that the coefficients



In the above equation, np,max, pH,max, and Tb,max represent the maximum values of the respective operational parameters. Then:
After the aforementioned normalization of the operating condition parameters, the new undetermined coefficients
Flow of the algorithm
Based on the derivation process detailed in sections “Identification of the leakage coefficient under a certain operating condition” and “Identification of the undetermined parameters in the function of the external leakage coefficient,” the identification process for the function of the external leakage coefficient of the piston chambers in the coupled pump-motor system is depicted in Figure 9. Utilizing this process, a program can be developed, which not only identifies the external leakage coefficient of the piston chambers at each operating condition point but also determines the quantitative function relationship between the external leakage coefficient of the piston chambers and the operating condition parameters.
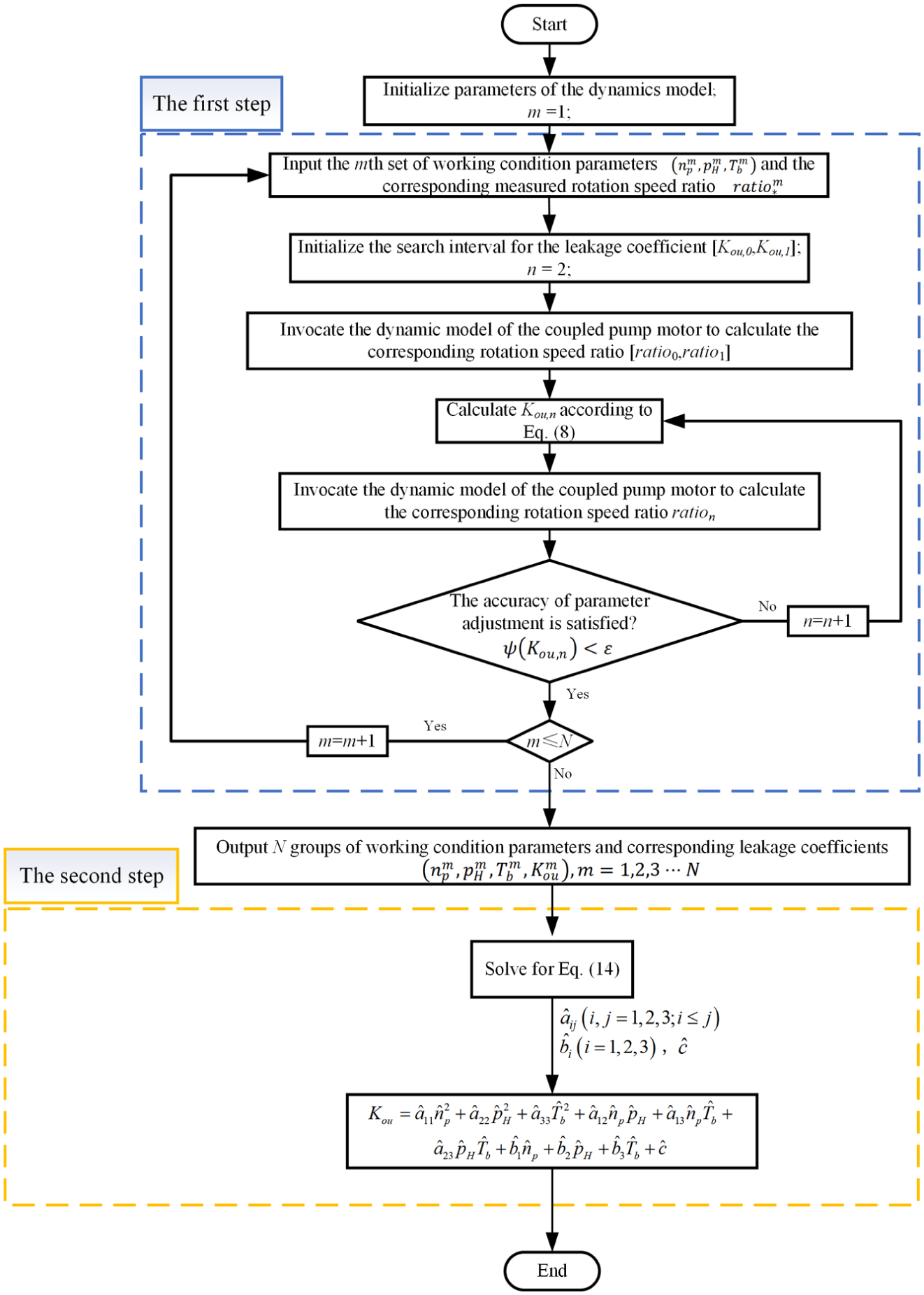
Identification process for the function of the leakage coefficient of the piston chambers in the coupled pump-motor system.
Test investigation
To validate the aforementioned algorithm, comprehensive bench tests were conducted on the coupled pump-motor system using a high-power transmission test rig, as illustrated in Figures 10 and 11. This specially designed test rig is equipped with two high-power electric motors for driving and loading the coupled pump-motor system, respectively, with the input shaft of the piston pump and the output shaft of the piston motor each connected to one motor. A hydraulic unit within the rig is tasked with delivering both compensated and control oil to the coupled pump-motor system, ensuring its smooth operation, and supplying lubricating oil to the test box. The displacement manipulation device, adopting an electric linear actuator, remotely controls the displacement of the piston pump by connecting to its displacement control handle, allowing for precise adjustments. The IMC testing system is responsible for the acquisition, recording, and display of key operation parameters of the coupled pump-motor system, including rotation speed, torque, temperature, pressure, and other signals, which are vital for assessing the system’s performance.
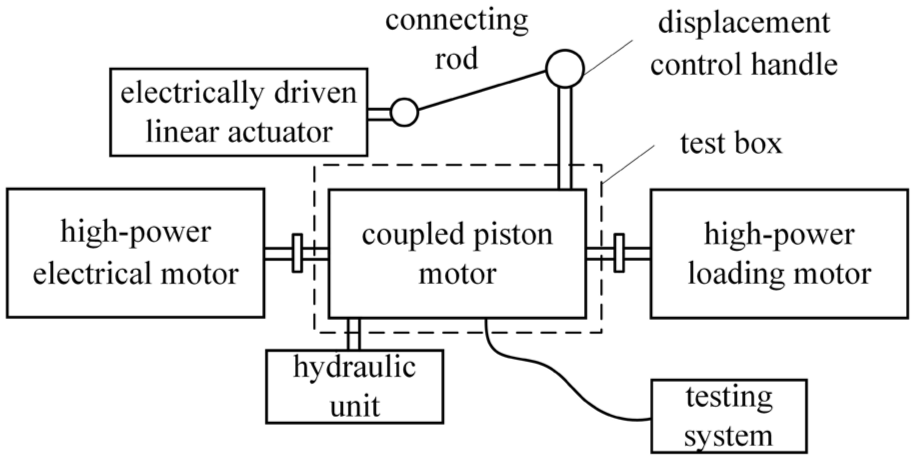
Arrangement sketch of the test bench.

Photograph of the test bench.
Case validation and result analysis
Test results
The pump’s rotation speed was stabilized at three distinct levels: approximately 1000, 2000, and 2800 r/min. Correspondingly, the working pressure was maintained at five specific values: approximately 10, 20, 30, 40, and 50 MPa. Additionally, the temperature of the compensated oil was controlled at three set points: approximately 30, 60, and 90 °C. Under these varied operating conditions, comprehensive measurements of some parameters were taken, including the pump’s rotation speed, the system’s working pressure, the temperature of the compensated oil, and the motor-to-pump rotation speed ratio. The test results at some operating condition points are shown in the table below (Table 1).
Test data for the coupled pump-motor system.

Identification of the leakage coefficient at a certain operating condition
Using the algorithm proposed in section “Identification of the leakage coefficient under a certain operating condition,” the external leakage coefficients under each operating condition are identified one by one. Here, a specific operating point (pump rotation speed: 999.23 r/min, operating high pressure: 31.06 MPa, compensated oil temperature: 58.24°C) is taken as an example for analysis. The tolerance of the secant method ε is set to 0.5%, meaning that if the error between the model-predicted rotation speed ratio and the measured rotation speed ratio is less than 0.5%, the external leakage coefficient is considered to meet the identification accuracy requirement. To investigate the influence of the width of the initial search interval on the convergence speed, the initial search intervals [K ou ,0, K ou ,1] are set to [0.006, 0.09], [0.036, 0.039], and [0.0015, 0.36], denoted as Interval 1, Interval 2, and Interval 3, respectively.
Figure 12 shows the iterative calculation process of the external leakage coefficient and the model-predicted rotation speed ratio. The horizontal axis represents the number of calls to the dynamics model of the pump-motor system. n = 1, 2 are the first two calls to the dynamic model initiated by the secant method. When the initial search conditions are set to Interval 1 and Interval 3, the identification accuracy requirement is met with only 3 calls to the dynamics model. When the initial search condition is set to Interval 2, the requirement is also satisfied with only 4 calls. The final identified external leakage coefficient under this operating condition is approximately 0.058 (L/min)/MPa. The case study demonstrates that the convergence speed and accuracy of the identification algorithm are not sensitive to the initial search interval. Under different initial search intervals, the algorithm can quickly converge and obtain a specific value of the external leakage coefficient that meets the accuracy requirement.

Identification process of external leakage coefficient of piston chamber under a certain operating condition. (a) The parameter adjustment process for the external leakage coefficient of the piston chamber and (b) Approximation process of simulation rotation speed ratio to test rotation speed ratio.
Identification of the relationship between the external leakage coefficient and operating conditions
Furthermore, the undetermined coefficients of the external leakage coefficient function, as defined in equation (18), can be calculated using the algorithm detailed in section “Identification of the undetermined parameters in the function of the external leakage coefficient,” with the results displayed in Table 2. Among them, the units of
Results of solving for the coefficients to be determined in the external leakage coefficient function.

Assessment of the effectiveness of identification
To evaluate the effectiveness of the proposed algorithm in identifying the external leakage coefficient, the external leakage coefficient in the dynamic model is set as a constant determined empirically and a quadratic function obtained by identification, respectively. Subsequently, the prediction results of the dynamic model of the pump-motor system for the rotation speed ratio for these two cases are compared with the measured results of the bench test. The results are shown in Figure 13.
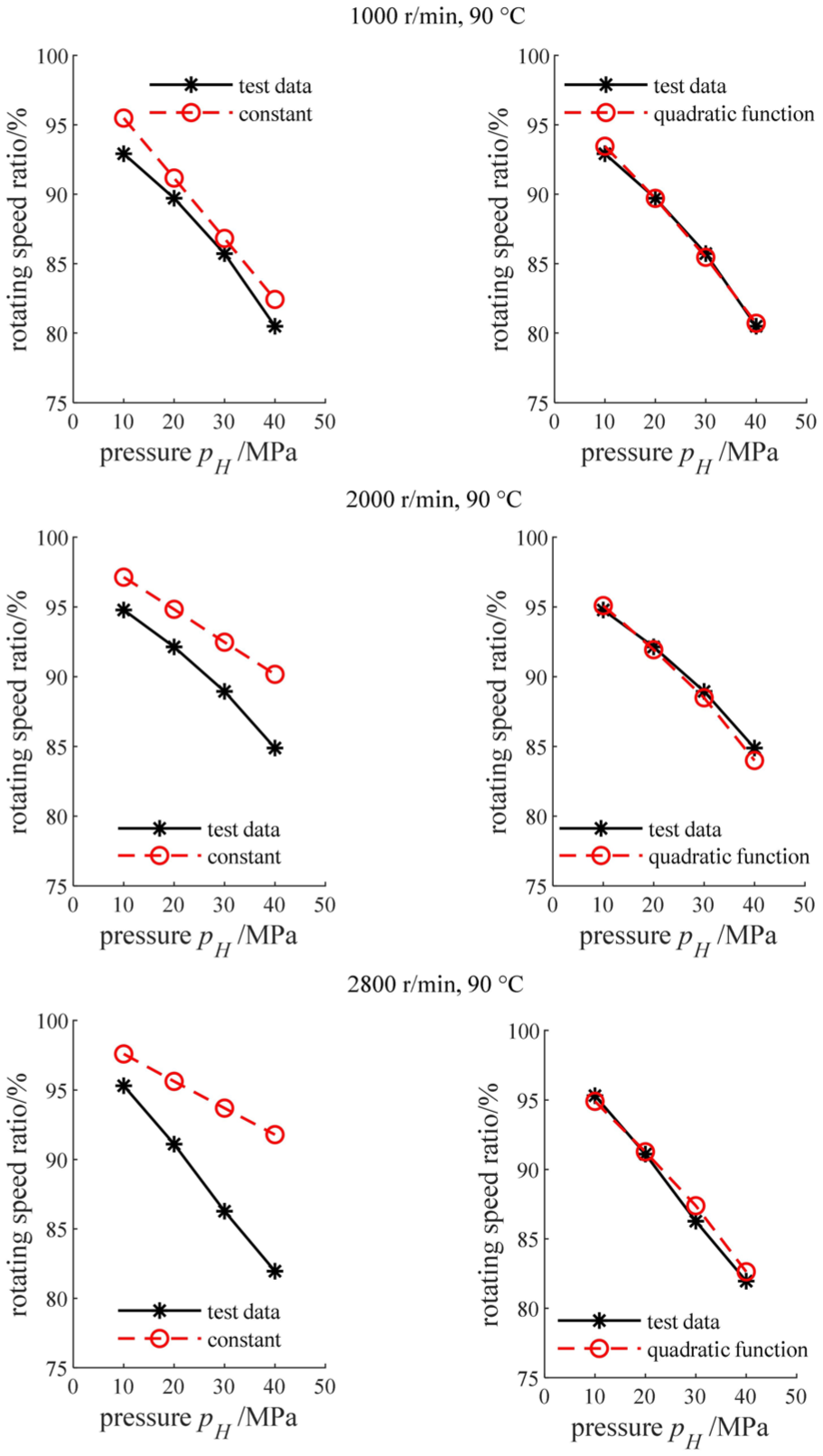
Comparison of simulation and test results for the rotation speed ratio of the coupled pump-motor system.
As illustrated in Figure 13, when the external leakage coefficient of the piston chambers is assumed to be an empirical constant, the dynamic model demonstrates high prediction accuracy for rotation speed ratios only under specific, limited operating conditions (1000 r/min, 20–40 MPa, 90°C). However, once the external leakage coefficient is accurately identified through the method proposed, the predictive capability of the dynamic model is significantly enhanced, enabling highly accurate estimations of the speed ratio over the full range of operating conditions.
Statistically, the original dynamic model, excluding parameter identification, exhibits a mean prediction error of 5.07% for the rotation speed ratio across the entire range of operating conditions. In contrast, once the model incorporates parameter identification, the mean error is substantially lowered to 0.81%. This improvement not only highlights the effectiveness of the parameter identification process but also proves that modeling the external leakage coefficient of the piston chambers as a quadratic function of the operating condition parameters is appropriate.
The research results indicate that the method proposed in this article can provide strong support for the optimized operation of piston pump-motor systems. As leakage is a key indicator of wear-induced degradation in piston pump-motor systems and internal wear is often difficult to detect, accurately identifying the external leakage coefficient allows for real-time monitoring of leakage trends and timely detection of potential leakage faults. Moreover, in the research and development of piston pump-motor systems, dynamic models are essential tools for analyzing system performance, optimizing parameters, and designing control strategies. The method proposed in this paper significantly enhances the accuracy of the dynamic model across the full range of operating conditions.
Variation characteristics of the external leakage coefficient
Figure 14 displays the variation surface of the external leakage coefficient as a function of the pump’s rotation speed and oil temperature, under two distinct working pressure levels: 20 and 40 MPa. The figure clearly shows that the external leakage coefficient rises progressively with the increasing rotation speed of the pump. This trend is due to the enhanced centrifugal force, shear rate, and hydrodynamic effects on the oil film within the friction pairs as the rotation speed increases, resulting in greater external leakage. Additionally, Figure 14 reveals a significant increase in the external leakage coefficient with the oil temperature. This increase is a consequence of the reduced viscosity of the oil at higher temperatures, which in turn promotes greater leakage.

Variation surface of the external leakage coefficient with the rotation speed of the pump and the oil temperature.
The SYP1003-6 oil kinematic viscosity test equipment, depicted in Figure 15, was utilized to measure the viscosity of oil at various temperatures within a range of 30°C to 90°C, with measurements taken at every 10°C interval. These measurements were then used to construct a variation curve of the oil’s kinematic viscosity, as presented in Figure 16. The curve illustrates a decrease in kinematic viscosity from 88.3 mm2/s at 30°C to 20.8 mm2/s at 90°C. Additionally, Figure 16 intuitively reveals a negative correlation between the oil’s viscosity and the external leakage coefficient.

SYP1003-6 oil viscometer.

Variation curves of the external leakage coefficient and oil kinematic viscosity with temperature.
Conclusions
This study proposes a method driven by mechanism and data fusion to identify the external leakage coefficient of the piston chambers in a coupled piston pump-motor system. By developing a set of algorithms, this method leverages easily accessible experimental data to automatically identify the external leakage coefficient of the piston chambers under various operating conditions. The main conclusions of the research are:
(1) The external leakage characteristics of the piston chamber are influenced by the coupled effects of the dynamic and thermodynamic behavior of the friction pairs. There exists a complex coupling relationship between the external leakage coefficient and the operating conditions. Based on a lumped-parameter dynamic model of the piston pump-motor system, an algorithm is proposed using a mechanism- and data-driven fusion approach to quantitatively identify the complex influence of operating conditions on the leakage characteristic of the piston chamber. The results indicate that the algorithm can efficiently identify the external leakage coefficient across different operating conditions, with a quadratic function effectively describing the relationship between the leakage coefficient and operating parameters.
(2) Dynamic models are crucial tools in the research and development of piston pump-motor systems. The identification method proposed in this study significantly enhances the simulation accuracy of the dynamic model. A specific case study demonstrates that after parameter identification, the prediction error of the speed ratio in the model is substantially reduced from 5.07% to 0.81%. This high-precision dynamic model provides robust support for further in-depth research and development activities, such as performance analysis, parameter optimization, and control strategy design.
Given that leakage is a key indicator of wear-induced degradation in piston pump-motor systems and internal wear is often difficult to detect, accurately identifying the external leakage coefficient allows for real-time monitoring of leakage trends and timely detection of potential leakage faults, thereby supporting the optimized operation of the piston pump-motor system. In future studies, further research will be conducted to enhance the real-time performance of the algorithm. For instance, high-computational-efficiency surrogate models of pump-motor systems can be employed to replace the current complex mechanistic models, thereby supporting the application of the proposed algorithm in online dynamic identification under actual operating conditions of equipment.
Footnotes
Handling Editor: Divyam Semwal
Ethical considerations
This article does not contain any studies with human or animal participants.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Author contributions
Hujiang Wang: Conceptualization, Software, Data curation, Formal Analysis, Funding acquisition, Validation, Investigation, Visualization, Methodology, Writing – original draft, Writing – review & editing. Yu Lin: Visualization, Writing – original draft. Tao Wang: Investigation. Fu Du: Investigation. Shousheng Tang: Investigation.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Research Program (grant number 2KD001-54).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.