
Abstract
In this paper, a quadrotor attitude controller based on a predefined time disturbance observer and non-singular predefined time sliding mode is proposed to reject unknown disturbances. Based on the predefined time stability theory, a novel predefined time disturbance observer (PTDO) is designed by constructing an auxiliary equation. The designed observer can ensure the estimation of disturbances within the predefined time. By adjusting the predefined time parameters, the estimation rate of the disturbances can be changed. A non-singular predefined time sliding mode surface is designed by constraining the exponent coefficient of the exponential function in the sliding mode surface. The designed sliding mode surface can avoid the singular problem that occurs in the non-singular predefined time sliding mode (NPTSM) controller. The Lyapunov function is used to prove that the designed observer and controller can converge within the predefined time. The simulation results verify that the proposed controllers and observers can converge within the predefined time, and also show that the proposed NPTSM has a convergence time that is approximately 20% less than the predefined time sliding mode (PTSM), approximately 80% less than the fixed time sliding mode (FTSM) and approximately 60% less than the PID.
Introduction
Due to the advantages of vertical take-off and landing, simple structure and so on, quadrotor UAV can be widely used in military, industry, agricultural forestry and various civilian fields. 1 Therefore, it has attracted many researchers to devote themselves to the research on the control system of quadrotor UAV, and they have put forward many effective control approach. Such as, linear control algorithms include PID,2–4 LQR, LQI,5–8 nonlinear algorithms include adaptive control,9,10 sliding mode control,11–13 intelligent control algorithms include particle swarm optimization, 14 fuzzy control. 15 These control algorithms effectively improve the flight stability of the quadrotor UAV. However, the control systems are finite time stable under most of these control algorithms. A finite time fast global sliding mode controller was designed by using attenuation function for quadrotor control, which can guarantee the tracking error converge in the finite time. 12 An adaptive control algorithm was adopted for quadrotor control to estimate disturbances and variable mass, and the attenuation function was utilized to improve the performance of global sliding mode control. 13 Hassani et al. developed a novel super-twisting non-singular terminal sliding mode control approach, ensuring that the tracking error converges within a finite time. 16 In unmanned aerial vehicle systems with suspended payloads, Geronel and Bueno introduced an adaptive coefficient estimation for uncertainty and payload, and designed an adaptive sliding mode control approach to significantly suppresses the undesirable oscillations of the payload. 17 To address the difficulty in system modeling, He et al., proposed an independent-of-model solution that only uses system input-output data, and this solution was utilized to design a fuzzy global sliding mode saturation controller. 18
With the continuous in-depth research on control schemes, the fixed time control algorithm was developed.19,20 The advantage of the fixed time control algorithm is that the control system has a faster convergence rate, and the boundary of the convergence time is a constant and independent of the initial conditions. However, the convergence time of the fixed-time control algorithm cannot be explicitly expressed directly through parameters. To overcome the limitation, the predefined time control algorithm was proposed.21–23 Compared with the finite time control algorithm, the convergence time boundary of the predefined time control algorithm is independent of the initial conditions. Compared with the fixed-time control algorithm, the predefined time control algorithm can achieve a faster convergence rate by adjusting the time parameters and allows the convergence time to be explicitly characterized through the time parameters. In the field of predefined time control algorithms, Song et al., designed a predefined time sliding mode controller, enabling the quadrotor UAV to converge within the predefined time.24,25 Wu et al., derived a new predefined time stability criterion, and based on this criterion, they designed a predefined time sliding mode controller for spacecraft attitude control. 26 Although the controllers were designed in the aforementioned references to achieve the convergence within the predefined time, none of them took into account the potential singularity problem of the controllers. To avoid singular problems in the designed controller, Li et al., employed piecewise continuous functions to prevent the controller from having negative exponential term, achieving non-singular predefined-time tracking control for quadrotor unmanned aerial vehicles. 27 Based on the predefined-time stability theory, Xie and Chen developed a non-singular predefined-time backstepping controller, enabling the attitude to converge to the vicinity of the origin within the desired time. 28
The quadrotor UAV is a typical underdriven and strongly coupled system, and has high sensitivity to external environmental factors, and these characteristics of it increase the difficulty of the quadrotor control. 29 In order to effectively solve problems such as external disturbances and uncertainties model of the quadrotor UAV, the control approach such as adaptation, neural networks 30 and observers 31 have been widely applied in the anti-disturbance control of quadrotor UAVs. In response to the issues of uncertainty and external disturbances, Naderian and Farrokhi, employed a neural network-based disturbance observer to estimate the uncertainty and external interference, and proposed an adaptive backstepping data-driven terminal sliding mode controller based on the disturbance observer, and designed a new approach that effectively suppressed the chattering problem. 32 Gao et al., used neural networks to approximate the uncertain terms of the quadrotor UAV and designed an adaptive law to estimate the unknown fault coefficients and the upper bound of unknown disturbances. 33
As the research progresses, the application of finite-time and fixed-time control algorithms becomes more widespread. By combining with observer technology, finite-time and fixed-time observers have emerged successively. In the field of finite-time algorithms, Liang et al., designed a finite-time disturbance observer and an adaptive super-twisting sliding mode controller, and the designed observer was used to estimate the uncertain terms and external disturbances of the quadrotor UAV, thereby enhancing the anti-disturbance ability of the system. 29 Liu and Li designed a finite-time extended state observer, which was used to estimate the state and disturbances of the quadrotor UAV. 34 Cui et al., designed a fixed-time disturbance observer to estimate external disturbances for improving the anti-interference capability of UAV. 35 The observer designed in the above-mentioned literatures can only ensure that the estimation error of the disturbance converges within a finite time or a fixed time. There are relatively few studies on the combination of predefined time control algorithms and observers.
Based on the above analysis, a non-singular sliding mode control approach based on a predefined time disturbance observer is proposed in the paper for quadrotor attitude to reduce the influence of disturbance and improve the stability of the quadrotor attitude in the paper. The main theory contributions in this paper are summarized as follows:
(1) This paper aims to the problem of improving the attitude performance of quadrotor under the disturbances. Hence, a non-singular sliding mode controller based on the predefined time disturbance observer for a quadrotor is proposed.
(2) In order to reduce the influence of disturbance on the attitude tracking of quadrotor, a predefined time disturbance observer is designed. Compared with the traditional disturbance observer (DO), the proposed observer in this paper is designed based on the pre-defined time stability theory. The disturbance observer can improve the tracking rate of the disturbance by adjusting the pre-defined time parameters, so as to reduce the influence of the disturbance on the attitude tracking performance of the quadrotor.
(3) In order to improve the attitude tracking performance of the quadrotor, a non-singular pre-defined time sliding mode controller based on sliding mode control theory and pre-defined time stability theory is designed. Under the designed sliding mode surface, the whole attitude tracking error can achieve the predefined time convergence, and the proposed controller can avoid the singular problem.
The paper is organized as follows. The attitude dynamical model of quadrotor system and the prerequisite knowledge are introduced in Sections “Quadrotor attitude dynamical mode” and “Prerequisite knowledge” respectively. The observer with the stability analysis is given in Section “Predefined time disturbance observer design.” The proposed controller with the stability analysis is given in Section “Non-singular predefined-time sliding mode controller design.” In Section “Simulated analysis,” the numerical simulation results are given to demonstrate the performance of the proposed control approach. Finally, a conclusion is described in Section “Conclusion.”
Quadrotor attitude dynamical mode
The quadrotor UAV studied in this paper adopts the “X” font layout, and Figure 1 illustrates the conversion relationship between the inertial coordinate system and the body coordinate system.
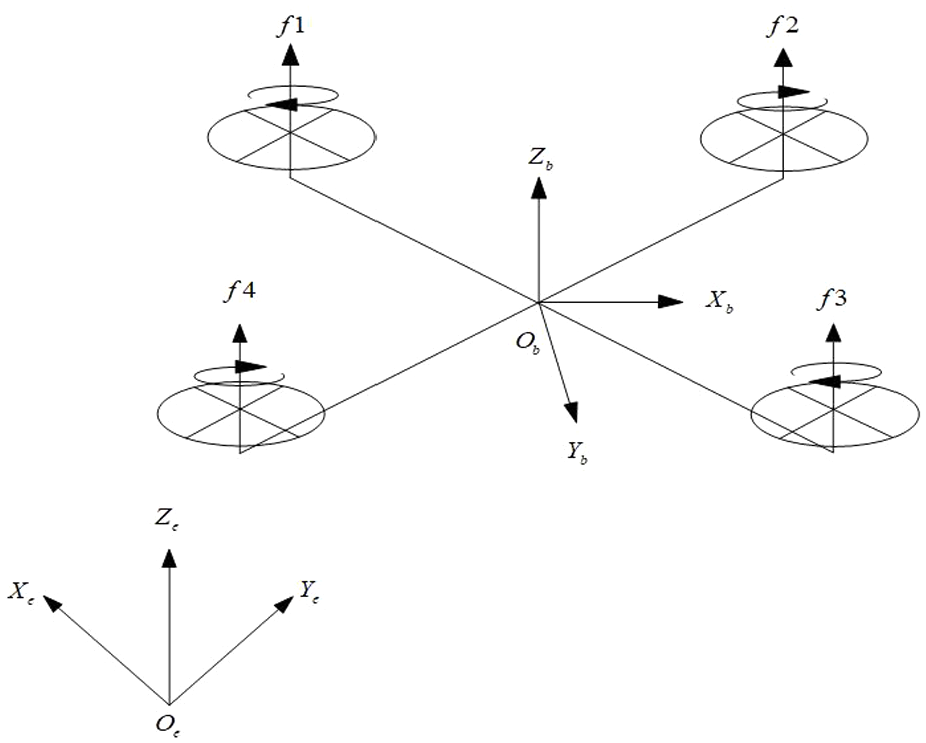
Diagram of the quadrotor in inertial coordinate system and body coordinate system.
In Figure 1, the propellers 1 and 3 rotate clockwise and the propellers 2 and 4 rotate counterclockwise. In order to accurately describe the structure and motion principle of the UAV, the body coordinate system b is defined as
For better analysis, the following assumptions are made before modeling:
According to the rigid body motion, the torque balance equation of the attitude of the quadrotor UAV can be provided as follows:

where

On account of the quadrotor are symmetrical,

Considering the air resistance
where
Prerequisite knowledge
The control objective is to achieve accurate estimation of external disturbance and quadrotor attitude tracking control within a predefined time in the paper. Therefore, a non-singular sliding mode controller and a disturbance observer based on predefined time stability theory are designed respectively. The following prerequisite knowledges are required before designing the observer and controller.




where
According to (8),

As can be seen from (9),

where
Predefined time disturbance observer design
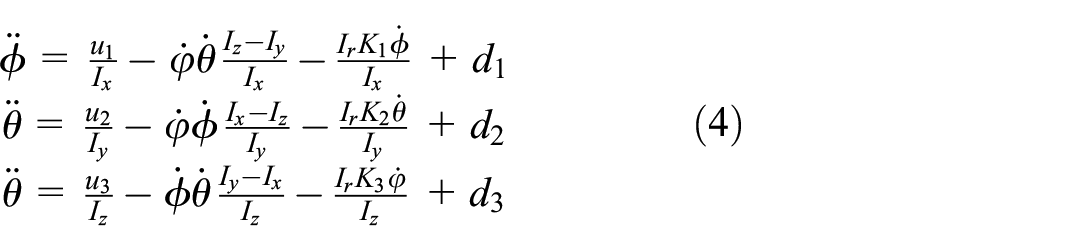
To facilitate subsequent observer and controller design, the quadrotor attitude dynamics (4) can be rewritten as follows

where

Inspired by the Liang et al., 34 a kind of the predefine time disturbance observer is designed for estimating the disturbances.
A auxiliary equation is designed first as follows

where
According to the auxiliary equation, the predefine time disturbance observer is designed as follows.


where

To analyze the convergence of

The derivative of

According to definition of

Based on the Lemma 1 and (18), it is obtained that the error

Based on (18) and (19), when
Non-singular predefined-time sliding mode controller design
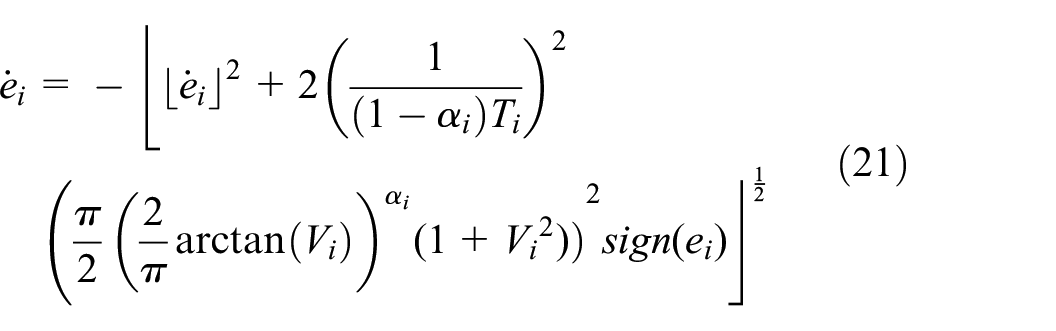
In order to avoid the singularity problem in the traditional predefined-time sliding mode control scheme, a non-singular predefined-time sliding mode surface is designed, and the convergence time of the proposed sliding mode surface can be adjusted by the parameter in the sliding stage. The design of the sliding mode surface is as follows:
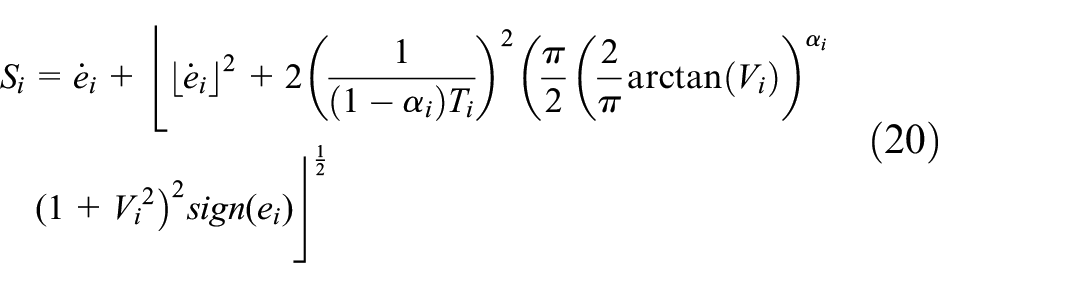
where
According to the relationship of

According to the relationship of

The Lyapunov function is selected as

Based on the Lemma 1 and the formula (23), when
According to the sliding mode surface (20), quadrotor attitude dynamics (11) and the estimation of the proposed observer, the controller is designed as follows:

where

From the equation (26), it can be observed that the exponential function

Substituting the controller (25) into (27), (27) can be rewritten as follows:

Select the Lyapunov function

According to the observer, when

When

According to the Lemma 1, under the proposed controller, it can be obtained that the trajectory tracking error of the control system can converge to the sliding mode surface within the predefined time
Simulated analysis
In order to verify the effectiveness of the proposed control approach, the simulated analysis of the control system is carried out by using the matlab/simulink simulation platform. The model parameters of the quadrotor UAV are shown in Table 1. The external disturbances are set as:
Model parameters of the quadrotor UAV.

In order to verify the tracking performance of the proposed controller and observer, Two sets of numerical simulations are carried out here. The numerical simulation I: Under the condition of the proposed controller, the simulation results of the observer (PTDO) proposed in this paper and the disturbance observer (DO) in Jahanshahi et al.
38
are compared. The numerical simulation II: While maintaining the same observer, the different preset convergence times are set for the controller proposed in this paper. The some parameters in the two sets of numerical simulations are shown in Tables 2 and 3. In numerical simulation I, the preset convergence time of the controller is
The parameters in numerical simulation I.

The parameters in numerical simulation II.

Figures 2 to 6 show the tracking diagrams of the attitude and disturbance in the two sets of numerical simulations.

Disturbance estimation in numerical simulation I: (a) estimation of disturbance

Disturbance estimation errors in numerical simulation I: (a) disturbance estimation errors

Quadrotor attituding tracking in numerical simulation II: (a) roll angle tracking curve, (b) yaw angle tracking curve and (c) pitch angle tracking curve.

Quadrotor attituding tracking errors in numerical simulation II: (a) pitch tracking error curve, (b) roll tracking error curve and (c) yaw tracking error curve.
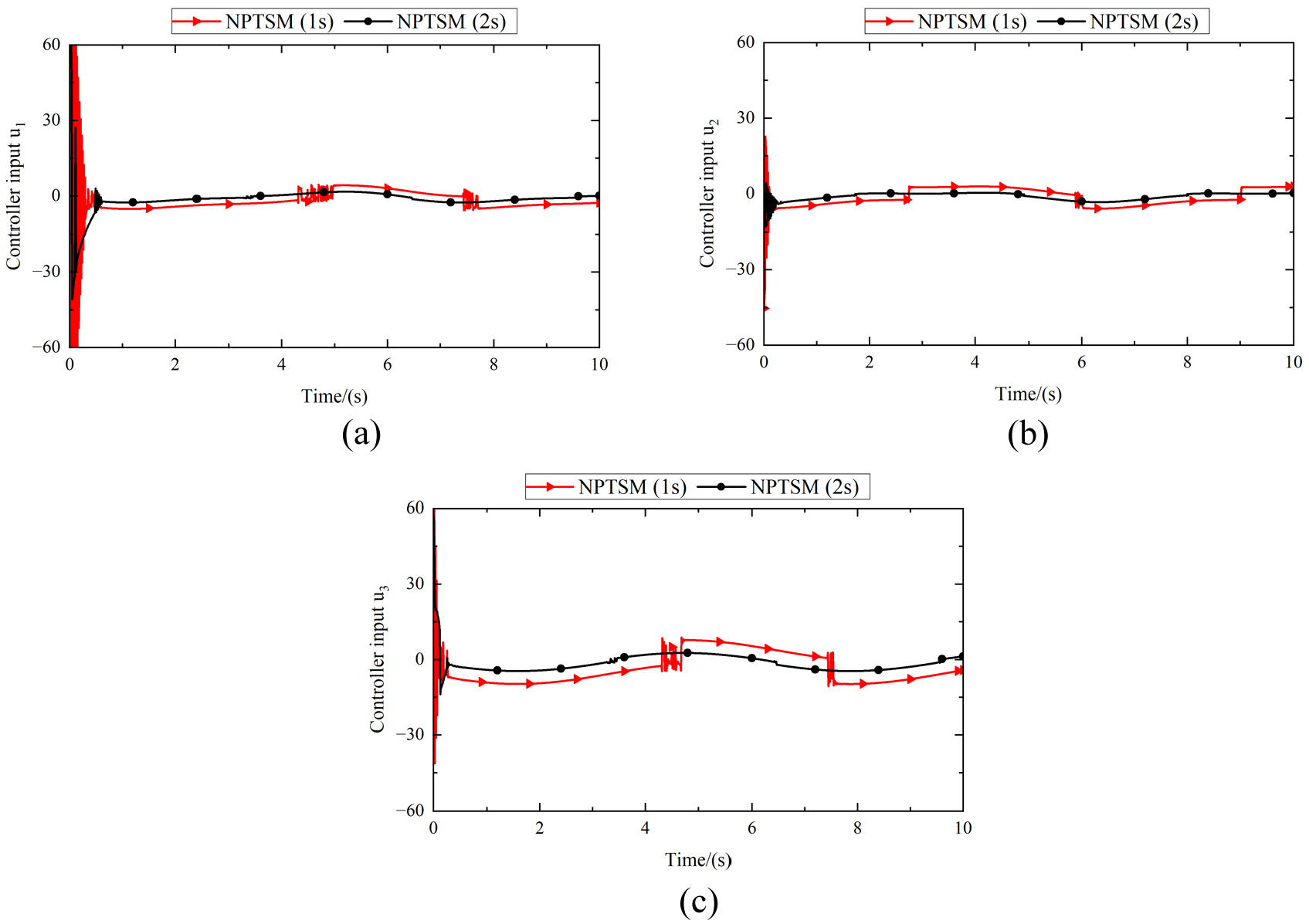
Control input in numerical simulation II: (a) control input
In Figures 2 and 3, the simulation results of the disturbance estimation curve and the disturbance estimation error curve of the proposed observer are presented respectively. Under the proposed observer, the disturbance can be estimated within 0.4 s under the predefined time of 0.6 s, and within 0.5 s under the predefined time of 1 s, and the disturbance estimation error also can converge to near zero in the same time. From the simulation results, Theorem 1 has been verified. The convergence time of the PTDO proposed in this paper can be adjusted by the parameters
Figures 4 and 5 show the simulation results of the tracking curve and tracking error curve of the quadrotor attitude. It can obtained from the simulation results that under the predefined time of 1 s, the tracking desired values are achieved within 0.3 s, and the attitude tracking errors can approach zero within 0.3 s. Under the predefined time of 2 s, the tracking desired values are achieved within 0.6 s, and the attitude tracking errors can approach zero within 0.6 s. Based on the above simulation results analysis, Theorem 3 and the theory rationality of the controller proposed in this paper are verified. The proposed controller enables the convergence time of the quadrotor attitude to be adjusted by parameters
Figure 6 shows the control intput curve of the proposed controller. Form the result of simulation, the length of the predefined time has a certain effect on the controller input, and settinng small predefined time parameters is easy to make the controller input chattering phenomenon.
In order to further verify the superiority of the control approach proposed in this paper, numerical simulation III is conducted that under different initial conditions, the tracking performances of the system under different control approaches are compared. Some simulations parameters are listed in Table 4. In numerical simulation III, the NPTSM proposed in this paper is compared with the following three control approachs: traditional PTSM controller,19–24 fixed-time sliding mode (FTSM) controller36–38 and traditional PID controller. The initial state of the quadrotor attitude is set as
The parameters in numerical simulation III.


Quadrotor attitude tracking in numerical simulation III: (a) roll angle tracking curve, (b) yaw angle tracking curve and (c) pitch angle tracking curve.

Quadrotor attitude tracking errors in numerical simulation III: (a) pitch tracking error curve, (b) roll tracking error curve and (c) yaw tracking error curve.

Integral absolute error of attitude tracking in numerical simulation III: (a) integral absolute error of pitch angle tracking, (b) integral absolute error of roll angle tracking and (c) integral absolute error of yaw angle tracking.
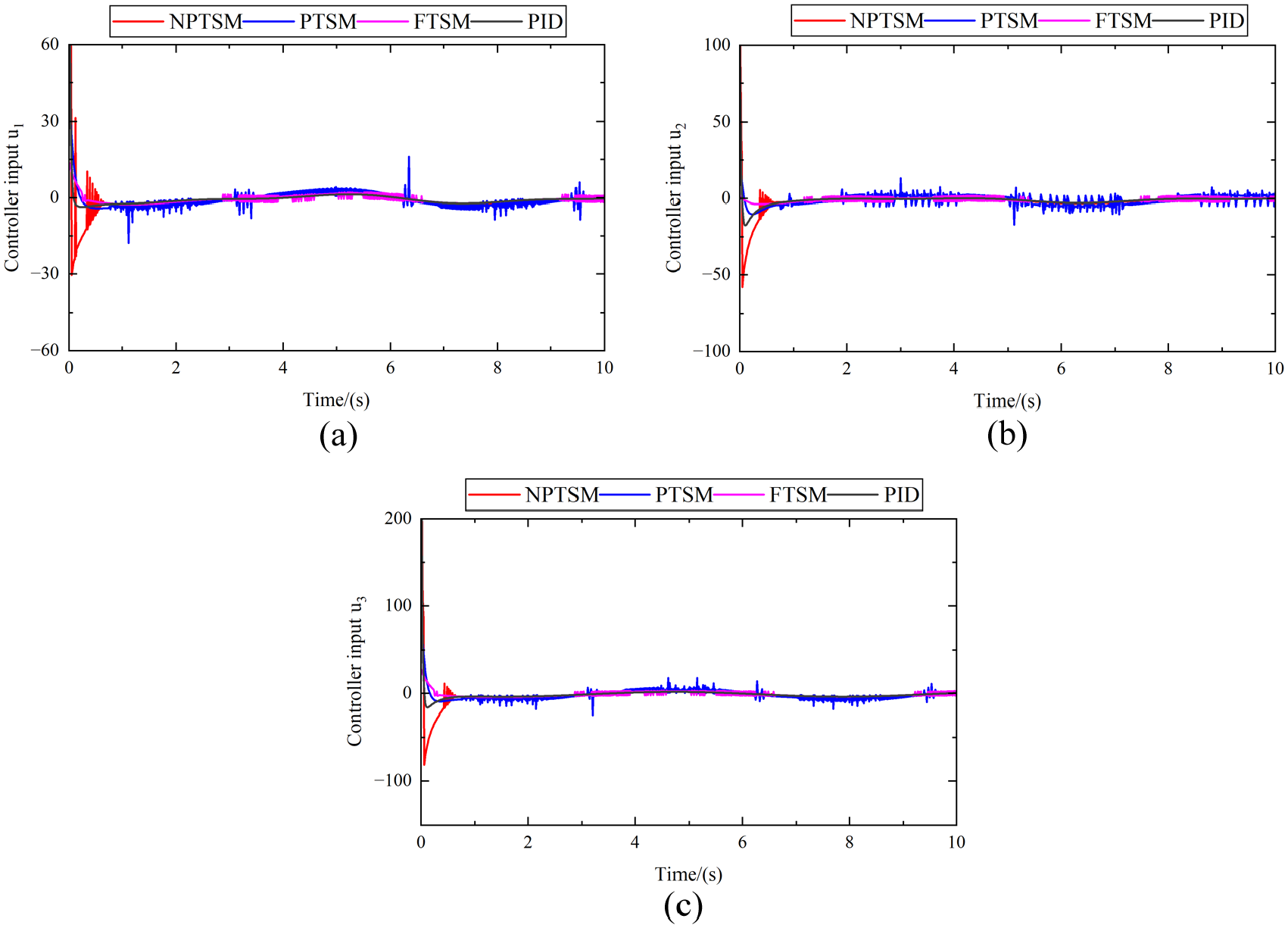
Control input in numerical simulation III: (a) control input
By comparing with Figures 4 and 5, it can be seen from Figures 7 and 8 that after changing the initial state, the attitude of the quadrotor UAV can track desired value within 0.5 s under the NPTSM. The simulation results prove that: the predefined time control approach has the characteristic of being insensitive to the initial conditions. Even when the system initial state is changed, the convergence time of the controller proposed in this paper still satisfies the requirement of being within the preset time. Furthermore, it can be seen from Figures 7 and 8 that under the PTSM, the convergence time of the quadrotor attitude tracking is approximately 0.6 s. Under the FTSM, the convergence time is approximately 2.5 s. Under the traditional PID, the convergence time is about 1.3 s. From the simulation results, it can be observed that the NPTSM reduces the convergence time by approximately 20% compared to the PTSM, and by approximately 80% compared to the FTSM, and by approximately 60% compared to the traditional PID. These prove the superiority of the control approach proposed in the paper in terms of convergence time.
Figure 9 shows the integral absolute error of the attitude tracking with the four control approachs. It can be obtained from the figure that the integral absolute error of NPTSM tends to stabilize within a shorter period of time. When reaching stability, the accumulated absolute error is approximately 0.08. The integral absolute error of PTSM is approximately 0.09 when the control system reaches stability. Compared with PTSM, the integral absolute error of NPTSM is reduced by approximately 10%. At the same time, compared with the FTSM, the integral absolute error of NPTSM is reduced by approximately 84%, and compared with the traditional PID, it is reduced by approximately 38%. This proves that NPTSM proposed in the paper has higher convergence accuracy compared to PTSM, FTSM and traditional PID.
Figure 10 shows the control inputs of the four control approachs. It can be seen from Figure 10 that the control input of the NPTSM only exhibits chattering phenomena in the early stage of convergence, while the control inputs of the PTSM and the FTSM have chattering phenomena for a long period of time.
Based on the above simulation results, both the predefined time disturbance observer and the non-singular predefined time controller proposed in this paper can track the desired value within the predefined time, and the convergence rate of the control system of the quadrotor attitude can be improved by adjusting the predefined time parameters of the proposed control scheme.
Conclusion
For improving attitude tracking performance of the quadrotor under unknown disturbances, a non-singular sliding mode control scheme based on the predefined time disturbance observer is designed by using the predefined time stability theory. Based on the Lyapunov theory and Lemma 1, it is proved that the designed controller and observer can achieve predefined time convergence. The effectiveness and superiority of the proposed control approach are verified by three numerical simulations. The simulation results of the numerical simulation I are verified Theorem 1, that is, adjusting the time parameters of the observer can change the convergence time. It also proved that the PTDO proposed in this paper has higher convergence accuracy than the DO. The simulation results of the numerical simulation II are verified that the proposed NPTSM control approach can change the convergence time by adjusting the time parameters. The simulation results of the numerical simulation III are demonstrated that the NPTSM has significantly improved convergence time and convergence accuracy compared to the PTSM, FTSM and PID.
Footnotes
Handling Editor: Douglas Bueno
Ethical considerations
This study is a quadrotor UAV modeling control scheme analysis and does not involve human participants, animal experiments or personal identifiable data.
Consent to participate
No human/animal data were collected or analyzed in this research.
Consent for publication
This is to confirm that the manuscript titled “A Non-singular Sliding Mode Controller for Quadrotor Attitude with Predefined Time Disturbance Observer,” we are submitting has never been published before. Also, it is not currently being considered for publication in any other journal. All the listed authors have carefully reviewed and approved this manuscript. We all agree to submit it to Advances in Mechanical Engineering for publication and are aware of and accept the journal’s publication policies.
Author contributions
All authors contributed to the study conception and design, data collection and analysis were performed by Jingxin, Dou, Dongwu Xie, Yingliang Wu and Ti Zhang. The first draft of the manuscript was written by Jingxin Dou and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported in part by Natural Science Foundation of Fujian Province, China (grant number 2021J011109, 2024J01886), and in part by Postgraduate Scientific Research Program of Putian University (yjs2024048, yjs2024049).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Within the scope of this study, all utilized data and relevant materials are available upon request from the authors.
Trial registration
This study did not involve a clinical trial requiring registration.