
Abstract
Ensuring reliable fault detection in rotating machinery under variable speed conditions is crucial for effective predictive maintenance. This study presents a refined hybrid approach for detecting gear defects by analyzing vibration signals in non-stationary conditions. The proposed method combines the strengths of Improved Complete Ensemble Empirical Mode Decomposition with Adaptive Noise (ICEEMDAN) and wavelet denoising to enhance defect identification. The methodology begins with ICEEMDAN, which decomposes the measured vibration signal into Intrinsic Mode Functions (IMFs), each representing distinct oscillatory components. A method based on the use of the kurtogram is proposed to identify the most relevant IMF containing the defect signature. To further enhance the signal-to-noise ratio (SNR), wavelet denoising is coupled with Principal Component Analysis (PCA). Subsequently, Order Tracking Analysis (OTA) is applied to the denoised IMF’s envelope, compensating for speed variations and enabling the extraction of a precise envelope order spectrum that highlights defect harmonics. Experimental validation demonstrates the effectiveness of the approach across various speed variations, including acceleration, deceleration, and combined regimes. The results confirm its superiority over conventional fault detection techniques, offering a robust and practical solution for real-world industrial applications. This method contributes to improve condition monitoring strategies, minimizing unplanned downtime and optimizing maintenance efforts.
Introduction
For any industrial company, predicting defects in the rotating machines plays an important role, since it helps to avoid unnecessary repairs and considerable downtime, consequently increasing the productivity. A Gearbox is a vital element in any power transmission system on rotating machine especially for handling significant torque. It is used to transfer motion by increasing or decreasing the rotation speed in various systems, such as vehicles, machine-tools, wind turbines, etc.
To avoid unscheduled gearbox shutdown, there is always a continues need for a reliable diagnostic method to detect defects in their early stage. The classical methods are mainly based on spectrum or cepstrum analyses. In the frequency domain, spectrum analysis is known as the most basic and oldest method. When the defect size grows, the amplitude of the meshing frequency increases. Moreover, in this case, a modulation phenomenon occurs, characterized by sidebands around the meshing frequency, x spaced by the rotation frequency of the shaft carrying the defective gear. 1 In some cases, these sidebands are not clearly visible on the spectrum, using cepstrum analysis is then necessary. This method consists of calculating a vector, named the cepstrum, which represents the inverse Fourier transform of the spectrum logarithm. Many applications of this approach have been widely used.2–4 Since these methods are limited and not adaptable for analyzing transient phenomena, time-frequency approaches are developed and favored to use in gear defect detection. The wavelet analysis is undoubtedly the most popular time-frequency method used for detecting faults in rotating machinery. It was used in the literature for gear defects diagnosis in its continuous or discrete versions.5–8
After several years of its use, wavelet analysis showed serious limitations, especially in the choice of the analyzing wavelet. For this reason, Huang et al. 9 proposed a new method under the name of Empirical Mode Decomposition (EMD). unlike wavelet analysis, EMD does not require analyzing wavelet mother, the signal is decomposed by itself using an adaptive decomposition method. The EMD has been widely used for rolling bearing and gear fault detection.10–12 It has been also combined with other signal processing tools to provide robust hybrid methods as the wavelet multi-resolution analysis in. 13
Despite its reliability in fault detection, this method has faced the mode mixing problem, where different scales may be consisted in one Intrinsic Mode Function (IMF), which could lead to false diagnostics. To solve this problem a new version of the EMD is proposed, the Ensemble Empirical Mode Decomposition (EEMD). 14 EEMD is a noise-assisted data analysis method, it involves adding a white noise to the signal and calculating an ensemble of trials using the original EMD, where the mean result of each ensemble represents the true IMF. Unfortunately, the provided solution causes more computing time. Nevertheless, EEMD has been used for the detection of rolling bearing defects,15–17 and gear defects.18–20 EEMD also has another limitation regarding the residue of the added white noise which remains in the new reconstructed components from the IMFs even after applying the averaging process.
To overcome this limitation, a new algorithm called Complete Ensemble EMD with Adaptive Noise (CEEMDAN) was presented by Torres et al. 21 It provides a complete decomposition with numerically negligible error. This proposed method is a recent signal decomposition technique applied for the first time on biomedical signal (ECG), where the results gave better spectral separation of mode functions. Many authors have discovered that CEEMDAN could be successfully implemented for monitoring and machine fault diagnosis.22–25 Jing et al. 26 demonstrate the efficiency of combining CEEMDAN with Teager Energy Operator for bearing fault diagnosis. CEEMDAN is used to decompose the signal and reduce noise. According to the correlation coefficient criterion, the most sensitive component is selected and its Teager energy operator is calculated to extract the fault. In the same context, an energy weighting method based on time-frequency spectrum analysis is proposed to extract weak impact features under a strong noise background. 27 Sometimes, combining two methods may give us more information about the defect, demonstrated by An et al. 28 in their work of extracting rolling bearing defects using CEEMDAN and Multi-scale Fuzzy Entropy (MFE).
To improve CEEMDAN and address its shortcomings, Colominas et al. 29 proposed an improved version of the complete ensemble EMD with adaptive noise (ICEEMDAN). Several real biomedical signals are treated, and the results show that the obtained components have less noise and more physical meaning. However, ICEEMDAN is only in its first applications in the field of fault detection in rotating machines.30–32
Unfortunately, most of these methods are not useful to analyze variable signals. The need to monitor machines operating under variable conditions (speed, load) has led researchers to adapt classical methods to the variable regime or developing new ones. Several researches have been conducted on rolling bearing and gear defects in variable regimes,33–36 however, their number remains far lower than that of the constant regime.
In the article of Chaabi et al. 33 a new method is performed to improve monitoring rolling bearing defects in variable regime using ICEEMDAN, multivariate denoising, and order analysis. The proposed method has been successfully applied on simulated and experimental signals measured in variable regime.
Recent advancements in machine learning (ML) and deep learning (DL) have significantly improved fault diagnosis in rotating machinery, particularly under non-stationary conditions. Traditional signal processing methods face challenges in extracting relevant fault features in complex environments, whereas ML and DL approaches offer greater adaptability and accuracy. For instance, Self-Organizing Maps (SOMs) combined with Variational Mode Decomposition (VMD) have been proposed to enhance bearing fault diagnosis by efficiently separating nonlinear and non-stationary signal components. This method enables unsupervised clustering of fault features, improving classification accuracy while reducing reliance on predefined fault patterns. 37 Similarly, a Few-Shot Learning-based approach integrates Ensemble Empirical Mode Decomposition (EEMD) with a parallel neural network with a relation network, allowing fault classification even with limited labeled data. This framework significantly reduces the need for large training datasets, making it particularly suitable for industrial applications in which acquiring fault data is costly and time-consuming. 38 In the context of multi-fault detection, deep learning models have been successfully employed to identify and classify multiple defects in gearbox components. A hybrid model that leverages convolutional neural networks (CNNs) and recurrent neural networks (RNNs) has demonstrated superior accuracy in recognizing complex fault patterns, even under varying load and speed conditions. 39 Additionally, a novel approach that combines Empirical Wavelet Transform (EWT), Gaussian Mixture Models (GMM), and Random Forest classifiers has been introduced to diagnose bearing faults under time-varying conditions. This method enhances the extraction of fault-related features while ensuring robust classification, making it effective for real-world applications where operating conditions fluctuate dynamically. 40 These advancements underscore the growing role of ML and DL in gear and bearing fault diagnostics by providing more reliable and automated solutions for condition monitoring. Inspired by these developments, this study proposes a hybrid signal processing approach to enhance gear fault detection in non-stationary conditions, bridging the gap between classical signal processing techniques and modern intelligent diagnostic systems.
For decades, detecting gear defects has remained a continuous challenge, as they are more difficult to diagnose compared to other faults, such as those in rolling bearings. Since ICEEMDAN has been successfully used for rolling bearing fault detection, its application to gear diagnosis could be highly advantageous. Indeed, setting aside differences in specific frequency components, the vibration signals of defective rolling bearings and gears share similar characteristics, notably periodic shocks.
A literature review shows that gear defects are more difficult to diagnose than other faults. The diagnostic task becomes even more challenging under variable operating conditions, where even well-known methods may be ineffective. The application of advanced signal processing techniques has greatly enhanced fault detection in industrial machinery, improving predictive maintenance strategies. A novel method combining Variational Mode Decomposition (VMD) and Wavelet Multi-Resolution Analysis (WMRA) has been applied to an industrial centrifugal pump, optimizing mode selection for precise fault identification, such as impeller wear, and bearing damage. 41 Similarly, a condition-based maintenance study has demonstrated the effectiveness of cyclostationary analysis and numerical modeling in detecting early-stage faults in gearboxes and rolling element bearings, reducing unexpected downtime. 42 Additionally, high-resolution spectral analysis has been successfully used to monitor turbo compressors in industrial gas and power plants, detecting issues like rotor imbalance and blade defects before they lead to critical failures. 43 These studies highlight the growing role of signal processing in industrial diagnostics, inspiring the development of improved hybrid methods, such as the one proposed in this study, for more reliable gear fault detection under variable speed conditions.
This paper proposes a hybrid method to improve the monitoring and diagnosis process of gear defects in non-stationary conditions using Improved Complete Ensemble Empirical Mode Decomposition with Adaptive Noise (ICEEMDAN), wavelet denoising, and Order Tracking Analysis (OTA). Moreover, the proposed approach has not yet been applied for detecting gear defects in the literature.
In section 2, gear faults detection in steady state and variable regime is presented. Section 3 is dedicated to the theoretical backgrounds of the proposed method including Improved CEEMDAN, Multivariate denoising and the Order Tracking Analysis. The proposed approach is detailed in section 4, then applied to experimentally measured vibratory signals in section 5. Finally, a discussions of the obtained results is presented in section 6.
Gear faults in variable regime
In the steady state regime, the signal of an undamaged pair of gears is dominated by the meshing frequency and several of its harmonics. Frequency components corresponding to the shafts’ rotational speed are also visible. Figure 1 shows a typical spectrum of a single stage gear transmission with a wheel and a pinion turning at 25 and 50 Hz, respectively. The meshing frequency is set at 1500 Hz. On the spectrum the meshing frequency and its harmonics as well as the rotation speeds of the shafts carrying the two gears can typically be observed.

Typical spectrum of an undamaged pair of gears.
In the case of a damaged gear periodical shocks are generated with each contact of the defective tooth against any other. A modulation phenomenon occurs on the spectrum, which will show many sidebands around the meshing frequency and its harmonics. These sidebands are spaced by the rotational frequency of the shaft carrying the defective gear. Similar to the previous example, a spectrum corresponding to a small defect on the wheel is highlighted in Figure 2. It shows sidebands around the meshing frequency spaced at 50 Hz, which indicates that the gear turning at 50 Hz is the defective one.

Spectrum in the case of small defect located on the gear turning at Fr2 = 50 Hz.
Two powerful detection tools are tested on an experimental signal measured in constant regime. Figure 3 represents the acceleration signal measured on gear transmission with defective wheel.

Signal of extracted tooth defect.
The rotation speed of the defective gear is set at 14 Hz and the number of teeth is 18, consequently the meshing frequency is 252 Hz. Periodic impacts due to the defect are clearly visible on the signal. Figure 4 confirms the presence of a gear defect since it clearly shows many sidebands around the meshing frequency and its harmonics spaced by the rotation frequency of the defective gear.

Spectrum of an extracted tooth defect.
Applying cepstrum analysis on the signal of Figure 3 highlights a main component corresponding to a quefrency of 0.07 s (1/14 Hz) and several of its rhamonics Figure 5. This quefrency corresponds perfectly to the rotation frequency of the shaft carrying the defective gear (14 Hz).

Cepstrum in the case of extracted tooth defect.
On the other hand, an envelope spectrum is performed after the application of demodulation approach using Hilbert transform. Figure 6 shows a main component corresponding to the rotation frequency of the gear turning at 14 Hz and several of its harmonics, which means that it is the defective one.

Envelope spectrum in the case of extracted tooth defect.
In conclusion, in the steady-state regime, the defect is clearly identified by the two considered tools.
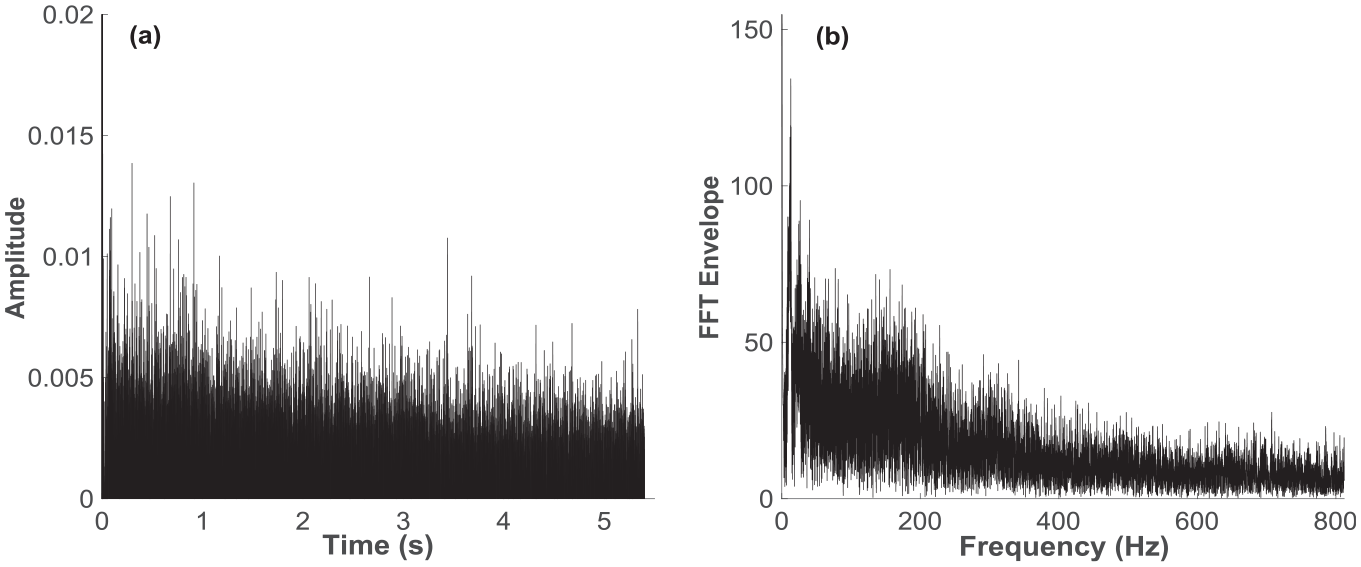
Now, let’s consider the same defect but in this case the rotation speed varies in acceleration mode from 0 to 840 rpm in 10.8 s as shown in Figure 7.

Signal of extracted tooth defect measured in acceleration regime: (a) pure signal and (b) rpm signal.
Its corresponding spectrum of Figure 8 doesn’t indicate any information about the defect.

Spectrum of the signal in the case of variable regime.
As the rotation frequency is variable, the meshing frequency is also variable, and in this case the modulations are impossible to detect. Neither the cepstrum nor the envelope spectrum are able to detect the defect (see Figure 9(a) and (b)).
(a) Cepstrum and (b) envelope spectrum of the signal in the case of extracted tooth defect in variable regime.
Consequently, detecting gear defects in variable regimes using conventional approaches remains extremely challenging, even when employing robust methods such as the cepstrum and the envelope spectrum.
Theoretical background
Improved CEEMDAN
When the mode mixing is founded in EMD method, the EEMD overcomes this problem with a noise-assisted analysis. The EEMD calculates an ensemble of trials using the original EMD, and adding to each trial a different composition of white noise of finite variance. This method can be summarized as follow.14,18,25 (for more information about the original EMD algorithm see 9 )
A new signal is generated
After decomposing
Finally, the average of the corresponding IMF is obtained by
The high computing time and the residue of added noise present in the obtained IMFs are the main problems of the EEMD approach. To overcome this limitation Torres et al.
21
has proposed a new algorithm named CEEMDAN based on adding a white noise in a specific frequency band during the decomposition of the signal.
1. Decompose I realization of

2. Calculate the first residue as:
3. Decompose I realization of
4. For k = 2…. K, calculate the k-th residue:
5. For k = 2…. K, define the (k + 1)-th mode as:
6. Go to step 4 for next k.
The last steps are repeated until the obtained residue is no longer to be decomposed:
th k is the total number of modes. The original signal
Even with the CEEMDAN algorithm, a little residual noise still exists in the obtained IMFs. Colominas et al. 29 proposed a new improved version of this method applied on theoretical and ECG real signals. It has shown to be more effective than all the previous versions (EMD, EEMD and CEEMDAN).
The improved CEEMDAN algorithm is presented in brief as below 29 :
1. Use EMD algorithm to calculate the local means of:
To obtain the first residue:
2. At the first stage, calculate the first IMF as:
3. Estimate the second residue as the average of local means of the realization:
4. Calculate the k-th IMF:
5. Go to step 4 for next k.
To demonstrate the efficiency of ICEEMDAN, Figure 10 presents an example of a simulated signal composed of three sine waves at 30, 50, and 100 Hz. This signal was analyzed using EMD, EEMD, CEEMDAN, and ICEEMDAN. Figure 11 displays the obtained IMFs, highlighting the superior decomposition capabilities of both CEEMDAN and ICEEMDAN. Additionally, Figure 12 shows that ICEEMDAN requires fewer iterations, leading to a reduction in computational time compared to the other methods.

Non-stationary signal and its components.

Displays the obtained IMFs, highlighting the superior decomposition capabilities of CEEMDAN and ICEEMDAN.
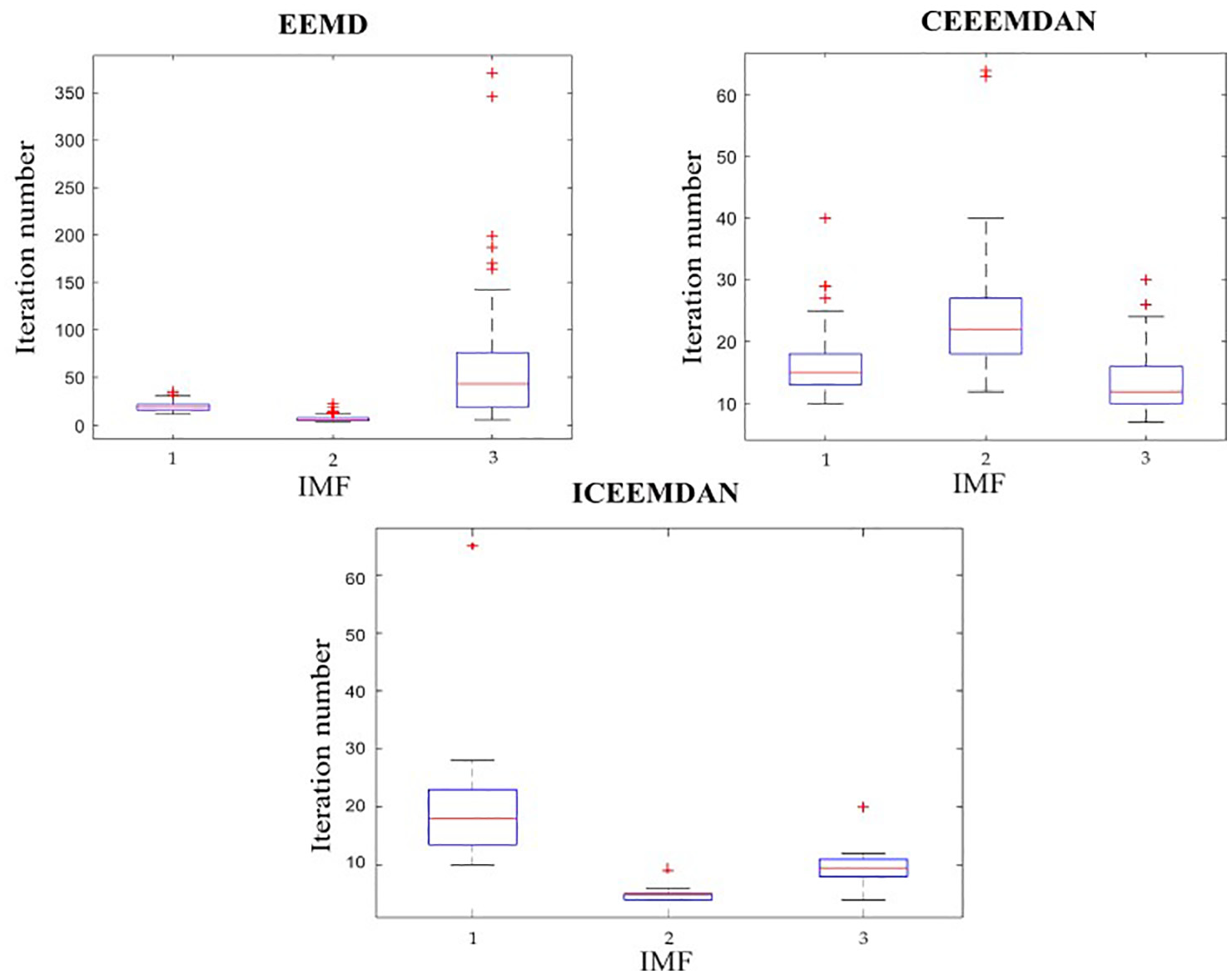
Shows that ICEEMDAN requires fewer iterations.
Multivariate denoising using wavelet and PCA analysis
This hybrid algorithm combines the traditional wavelet denoising procedure and Principal Component Analysis. The new algorithm is summarized below. 44
Perform the wavelet transform at level J of each column of
For
Do again the previous step for the approximation matrix
Reconstruct new matrix
Perform the PCA of matrix
Order tracking analysis
As shown before, monitoring gear defects is impossible with conventional methods when the operating conditions are variable, especially speed and load. In this case, vibratory signals analysis must be achieved in order domain rather than frequency domain. For the order analysis, it is necessary to sample the vibration signal at constant angular increments and therefore at a rate proportional to the shaft speed.
In stationary regime the characteristic frequency of gear defect is equal to the rotation frequency of the shaft carrying the defective gear. By analogy with rolling bearing defects this characteristic frequency can then be given by:

Where
Proposed approach
The proposed approach aims to use a hybrid method to allow detection of gear defects in a variable regime. The most important steps are as follow:
- First, applying the kurtogram 45 to the measured signal located the frequency range that covers the information corresponding to gear defect with the highest kurtosis value. Indeed, gear defect induces periodical chocks and the kurtosis is the most sensitive indicator to defects inducing periodical impulsive forces.
- In the second step, the Improved CEEMDAN is used to decompose the raw signal into different IMFs. This method isolates the signature of the gear defect in specific IMF.
- Based on the kurtogram plot, the relevant IMF is selected. This IMF will contain the optimal information about the gear defect.
- After isolating the IMF covering the optimal frequency band selected by the kurtogram and kurtosis value, a multivariate denoising based on wavelet and PCA method is applied to remove the residual noise and increase the SNR of the selected IMF to give more effective result.
- Finally, order analysis is performed on the optimal denoised IMF to eliminate the speed variation effect, then envelope analysis based on Hilbert spectrum is performed to obtain an order envelope spectrum highlighting the defect order and its harmonics.
Figure 13 summarizes the global flowchart of the proposed approach.
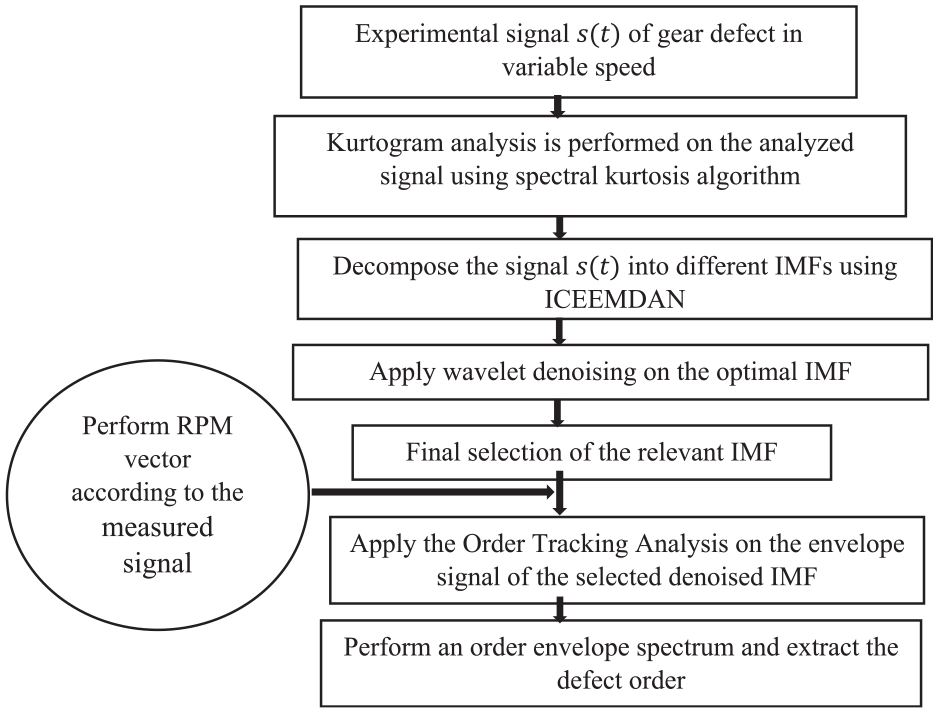
Global flowchart of the proposed method.
Experimental procedure
The data used in the current study is measured on the Machinery Faults Simulator (MFS) test rig using SpectraQuest processing software. Post processing using the proposed approach is carried out under MATLAB. The MFS test rig consists mainly of an electric motor with 0.75 KW and a maximum rotation speed of 6000 rpm, a coupling, belt transmission (d1 = 51 mm, d2 = 126 mm, and L = 965 mm) with transmission ratio equal to 0.4, and finally a gearbox Figure 14.

Experimental setup.
The one-stage gearbox contains two wheels with straight cut bevel teeth with 1.5:1 ratio normally lubricated and manually adjustable. A magnetic brake is used to simulate the load. The input and output wheels have 18 and 27 teeth, respectively, the transmission ratio is therefore equal to 0.67. Two accelerometers are used to measure vibratory signals. The first one is a bidirectional accelerometer placed on the top of the gearbox reducer (axial, radial), while the second one is mounted horizontally, A tachometer is used to measure the rotation speed of the motor shaft providing the rpm signal.
Three different gearboxes are used, each with a different gear defect, half-tooth extracted defect D1 (gray gearbox), generalized defect DG (red gearbox), and extracted tooth defect D2 as illustrated in Table 1 and Figure 15. For all the three gearboxes the defective gear is the one with 18 teeth mounted on the input shaft.
Experimental plan.


(a) Half-extracted tooth defect, (b) extracted tooth defect, and (c) generalized defect.
A combined regime having three different modes is considered in this study. The first is an acceleration mode from 0 to 14 Hz (0–840 rpm) within 10.8 s. The second mode is a steady-state regime at 14 Hz (840 rpm) for 5.4 s, and finally the third mode is a deceleration from 14 to 0 Hz (840 to 0 rpm) for 11.5 s.
Results and discussion
Case of extracted tooth in acceleration mode
Choice of the optimal frequency range
The proposed approach is first applied on the signal shown in Figure 7. Note that the spectrum, cepstrum and envelope spectrum were incapable to detect the gear defect in variable speed (Acceleration mode). As a first step, the kurtogram of the signal is calculated indicating the high kurtosis values in the frequency range of (1600–3200 Hz; see Figure 16).
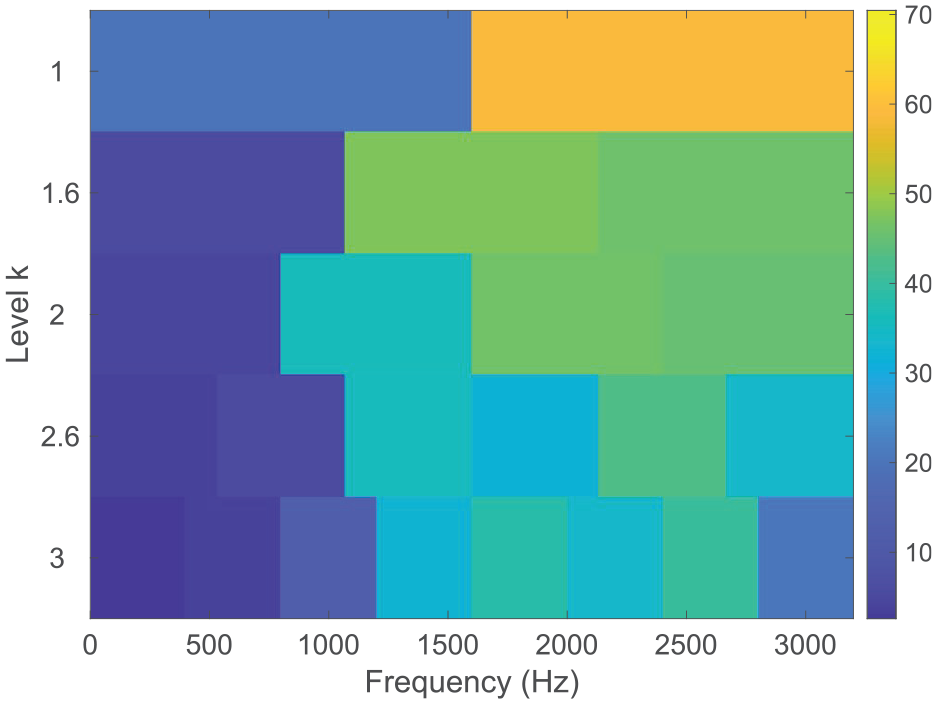
Kurtogam of the signal of extracted tooth defect.
This result shows that the highest kurtosis values are located in the high frequency range and not usually around the meshing frequency as mentioned in section 3.
Improved CEEMDAN decomposition and selection of the relevant IMF
The Improved Complete Ensemble Empirical Mode Decomposition with Adaptive Noise (ICEEMDAN) is applied to decompose the signal into several Intrinsic Mode Functions (IMF). Only the first four IMFs are retained, the others correspond to low frequencies and consequently don’t have significant contribution in the defect detection. The spectra of IMF1 and IMF2 (Figure 17) show modulation in the frequency band selected from the kurtogram (1600–3200 Hz).

IMFs and corresponding spectra obtained after the application of ICEEMDAN.
However, IMF2 has the highest kurtosis value, 73.86 against 58.14 for IMF1, for this raison it will be taken as optimal IMF in the next step.
Wavelet denoising and order tracking analysis
A wavelet denoising is applied to the optimal IMF to remove the residual noise added by ICEEMDAN and improve the Signal to Noise Ratio (SNR), the kurtosis value is increased from 73.86 to 96.81 (see Figure 18(a) and (b)). For the analysis, the “sym7” wavelet was used. The PCA parameters were set to 4 for both the number of principal component approximations and the number of principal components in the final decomposition.
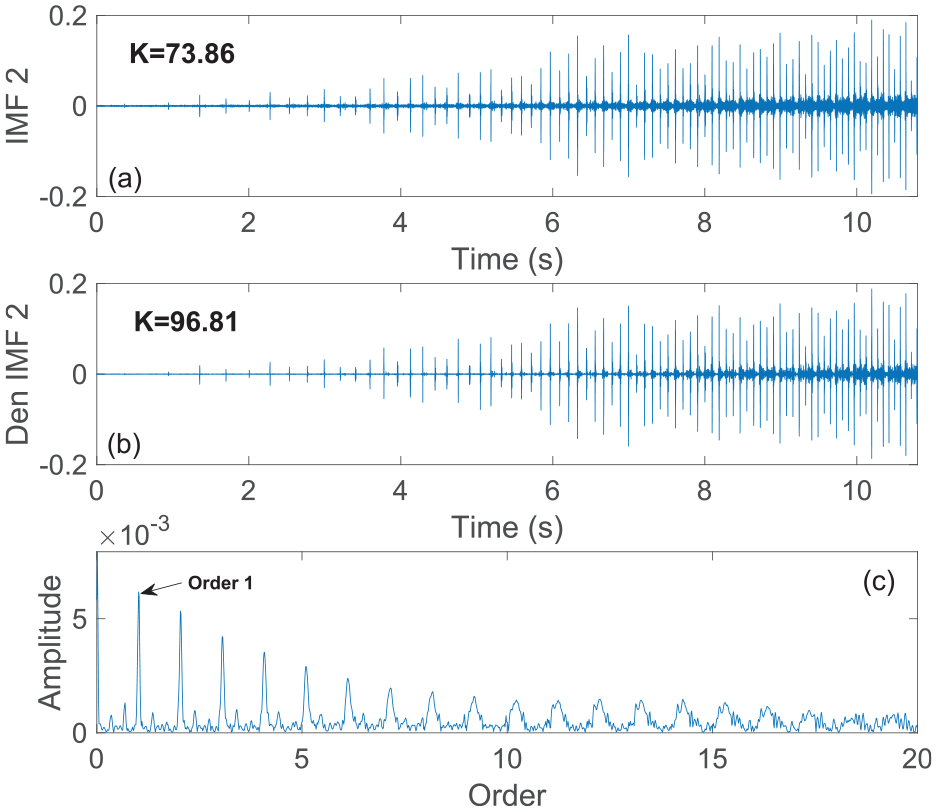
(a) Optimal IMF, (b) denoised IMF, (c) order envelope spectrum.
Finally, Order Tracking Analysis (OTA) is applied to the denoised IMF to remove the speed variation effect. In this case the RPM signal corresponding to the gearbox input shaft (carrying the defective gear) is used in the OTA algorithm (during acceleration from 0 to 14 Hz).
Figure 18(c) represents the order envelope spectrum highlighting the order of the defect (order one of the rotating frequency) and several of its harmonics, which indicates that the wheel mounted on the input shaft is the defective one.
Case of non-appropriate rpm signal
In practice the defect is not known in advance, as it is in laboratory tests. Both the defective wheel and the shaft carrying it are unknown. Consequently, the appropriate rpm signal for Order Tracking Analysis is also unknown. It is then useful to test what happens when the OTA algorithm is provided with the “wrong” rpm signal, that is, one that does not correspond to the shaft carrying the defective wheel.
Figure 19 shows the order envelope spectrum obtained after applying the proposed approach to the previous case, using the rpm signal of the output shaft (acceleration from 0 to 8.4 Hz) instead of the input shaft. In this case the envelope order spectrum shows main order of 1.71 indicating that the defect is not on the wheel mounted on the output shaft.

Order envelope spectrum with the rpm signal of output shaft.
In practice, it is necessary to test the OTA algorithm with the rpm signals of all the gearbox shafts. The one allowing an envelope order spectrum with a main order equal to 1 is that carrying the defective gear.
Case of non-appropriate selection of the relevant IMF
To confirm the validity of the adopted approach for the selection of the optimal IMF, the IMF7 whose frequency band covers the meshing frequency range (from 0 to 252 Hz) is analyzed as mentioned in the literature for the steady-state regime (cf. section 3). The final result, shown in Figure 20, indicates that the kurtosis value is very low (8.7) compared to the optimal IMF2 (73.86) selected above

(a) IMF7 signal, (b) denoised IMF7, and (c) order envelope spectrum.
Moreover, the wavelet denoising has apparently no effect since the kurtosis before and after denoising is the same. The order envelope spectrum shows the order of the rotationro speed of the defective gear; however, the results remain poor compared to those of Figure 18. This confirms that the kurtogram is the most effective tool for selecting the optimal IMF.
Case of extracted tooth in deceleration mode
Now, consider the same defect in the case of deceleration mode from 14 to 0 Hz. Figure 21(a) and (b) represents the measured signal and its corresponding rpm signal. The final result obtained after applying the proposed approach is shown in Figure 21(c). The order envelope spectrum clearly highlights the order 1, corresponding to the rotational frequency of the input shaft and its harmonics.

(a) Signal of the extracted tooth in the case of deceleration mode, (b) rpm signal, and (c) order envelope spectrum.
Case of extracted tooth in combined mode (acceleration-steady state regime-deceleration)
In this case, a more complex variation regime is considered. Three speed variation modes are used: acceleration from 0 to 14 Hz in 10.8 s, constant speed at 14 Hz during 5.4 s, and finally, deceleration mode from 14 to 0 Hz in 11.5 s, as shown in Figure 22(a) and (b). The proposed method is applied as previously mentioned, leading to the order envelope spectrum of Figure 22(c). the order of the rotation speed of the input shaft is clearly visible, confirming once again that the defective wheel is the one mounted on the input shaft.
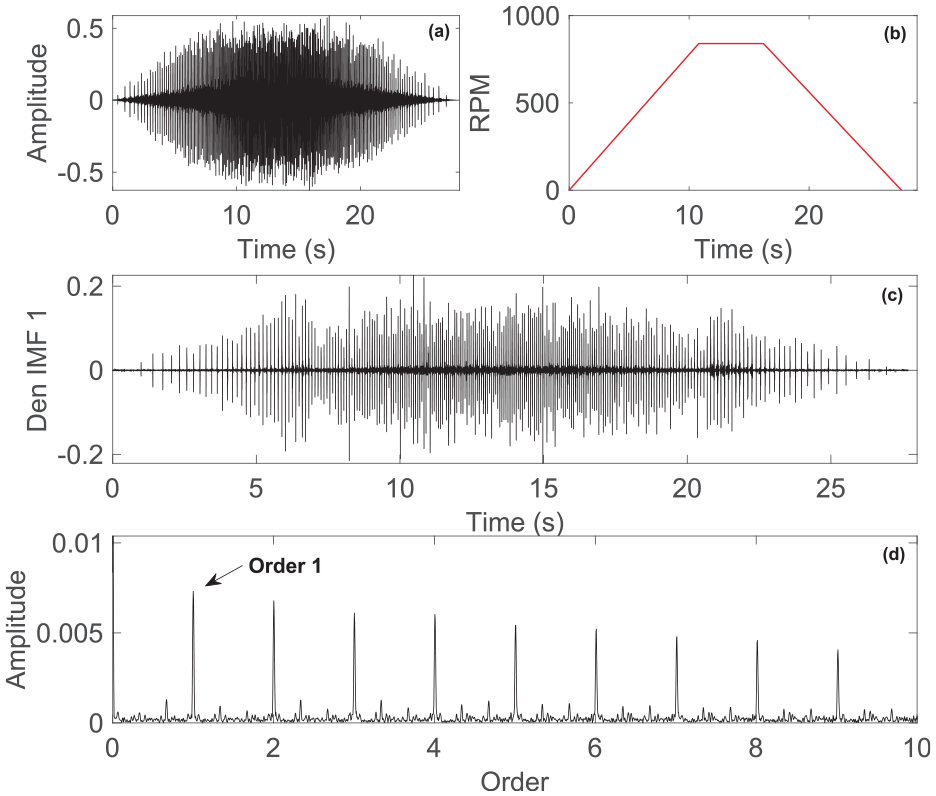
(a) Original signal of extracted tooth defect, (b) rpm signal, (c) denoised IMF, and (d) Order envelope spectrum in combined mode.
Case of generalized defect in combined mode
Figure 23(a) shows the signal of generalized defect measured in combined mode as mentioned in the rpm signal of Figure 23(b). In this case the impacts are not visible on the measured signal as in the case of extracted tooth, consequently the detection will be more difficult. As final result and after applying the proposed approach the order 1 of the rotation speed is obtained and some of its harmonics, which confirms the presence of gear defect in the input shaft, (see Figure 23(c)).
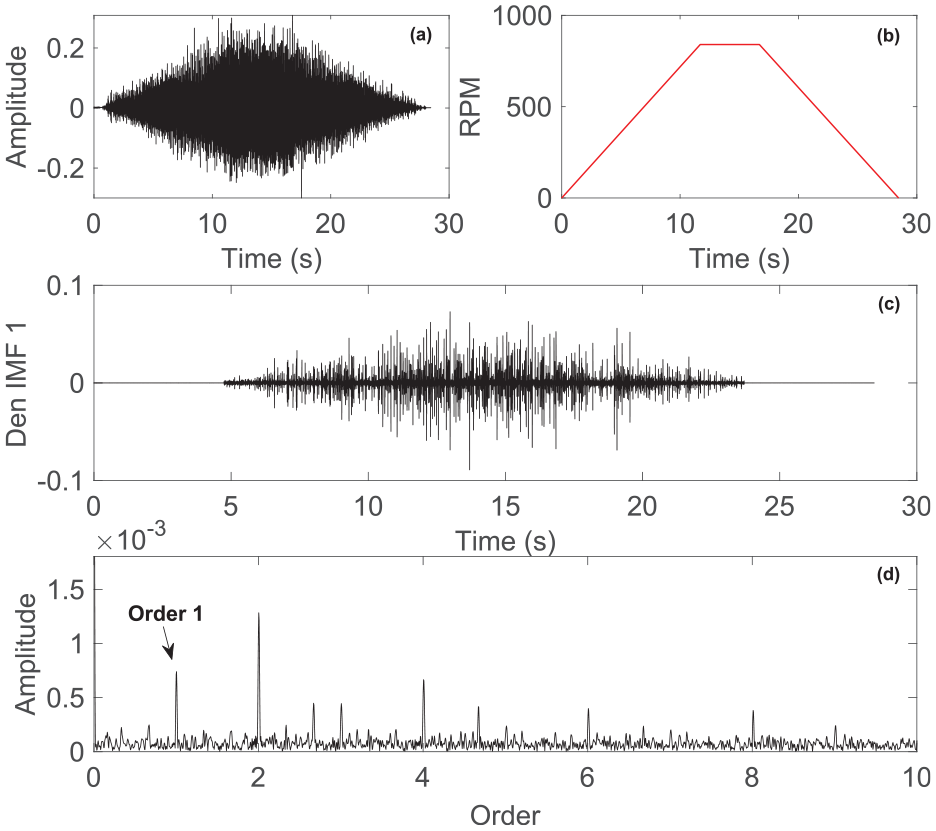
(a) Original signal of generalized defect, (b) rpm signal, (c) denoised IMF, and (d) Order envelope spectrum in combined mode.
Case of half-extracted tooth in combined mode
In this section a half-extracted tooth defect is considered. Figure 24(a) represents the measured signal in combined mode as mentioned in the rpm signal of Figure 24(b). Figure 24(c) shows the final order envelope spectrum obtained after the application of the proposed approach; several harmonics of the order defect (order 1) are clearly visible.
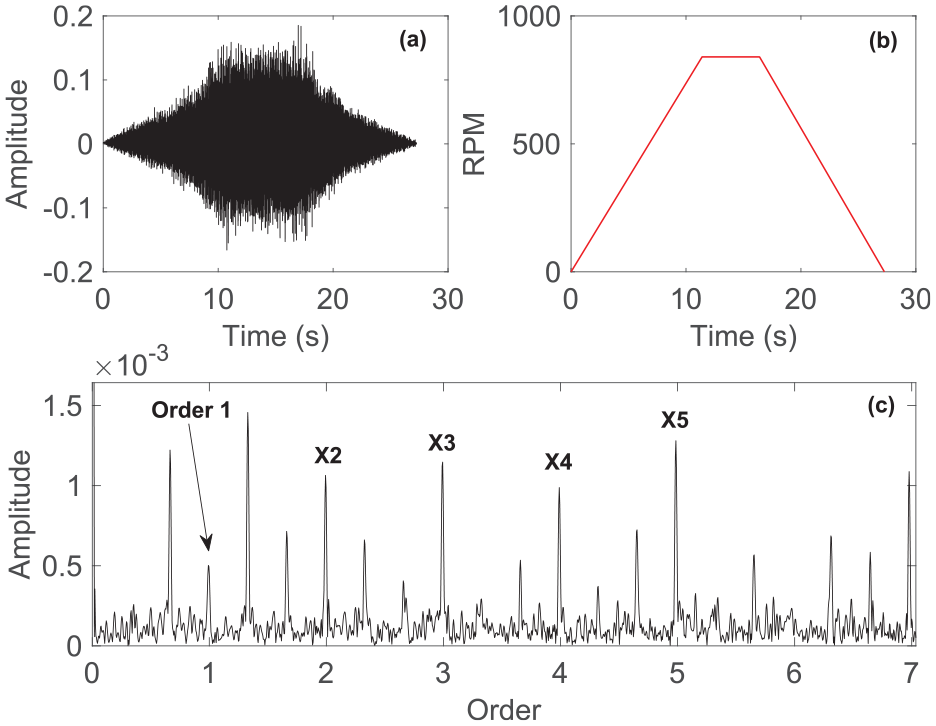
(a) Original signal, (b) rpm signal, and (c) order envelope spectrum in the case of half-extracted tooth in combined mode.
In addition, sub-harmonics corresponding to almost one-third the order 1 are visible. After investigation, these sub-harmonics are due to belt defect. Note that this defect was also present in the two previous cases (extracted tooth and generalized defects), however the corresponding sub-harmonics are so weak compared with gear defect. By coincidence, this result shows that the proposed approach can detect other defects, in addition of gear defect, which is very interesting as perspective in the future.
Comments on the obtained results
The approach adopted by the proposed method is to isolate the gear defect signature from other machine components. Improved CEEMDAN is then used to decompose the measured signal into several IMFs. In the literature ICEEMDAN was shown to be a more complete decomposition than other methods that is, EMD, EEMD and CEEMDAN. The mode mixing problem and the residual noise are almost completely removed after the decomposition.
Gear defect signature is now localized in a specific IMF; it is then essential to look for this IMF and select it as relevant one. As gear defects generate periodical impulsive forces, the best indicator proposed for the selection of the relevant IMF is the kurtosis. For this, the kurtogram plot obtained after the computation of the spectral kurtosis is used. The kurtogram locates the best frequency band allowing the highest kurtosis values. The IMF covering this optimal frequency band is then selected as relevant one.
The results show that the kurtogram is the best way to select the relevant IMF. In this context the IMF covering the meshing frequency range doesn’t give such satisfying results. Consequently, the modulations produced from gear defect are not usually located around the meshing frequency and its harmonics, and can excite the system resonances at high frequencies where filtering operation is optimal.
The results show that the use of non-appropriate rpm signal in order tracking analysis gave a defect order different from 1, and can lead to false diagnosis. In multiple-stages gearbox it is then necessary to test the order tracking algorithm with rpm signals of all the shafts. The rpm signal allowing an order equal to 1 corresponds to the shaft carrying the defective gear.
Conclusion
In this article, a hybrid method is proposed for gear defects detection in non-stationary running condition. The proposed approach is based on the Improved CEEMDAN, Multivariate denoising based on Wavelet and Principal Component Analysis, and Order Tracking Analysis. The results show that the proposed approach is proven to be effective with experimental signals measured in variable speed. The gear defects are very well highlighted for three defect types and in three different speed variation modes. As final result, the defect order is clearly visible on the order envelope spectrum as well as several of its harmonics. Note that this order must be equal to 1 to confirm the presence of the defect and to know the shaft carrying the defective gear, for this we demonstrated that the Order Tracking algorithm must be alimented with the true rpm signal. The results also demonstrated that the kurtogram is the best tool for the selection of the relevant IMF obtained after the ICEEMDAN decomposition. This step is very important since the gear defect signature is isolated in this relevant IMF, and from which the order envelope spectrum is extracted. The proposed hybrid approach is very helpful when making decision during the surveillance of gear transmission systems found in almost every rotating machine working under non-stationary condition. This task represented a very hard challenge for engineers.
As future research, the proposed approach could be applied to the detection of combined rolling bearing and gear defects, which presents greater complexity. Additionally, integrating this approach with AI techniques is promising, as it could enable more accurate and faster detection tasks.
Footnotes
Handling Editor: Sharmili Pandian
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The current research was conducted by the “Structural Dynamics & Industrial Maintenance” research group at the Mechanics & Structures Laboratory (LMS) of the University 8 Mai 1945, Guelma, Algeria, under the funding of the General Directorate of Scientific Research and Technological Development (DGRSDT) through the PRFU research project: A11N01UN240120220004
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.