
Abstract
A load flow model of a proportional valve-controlled asymmetric cylinder system is developed to assess inconsistent dynamic properties. The load flow property is analyzed, and the basic state is defined for the system. In addition, an invariance compensation method that considers the structure and load effect is proposed. Any asymmetric state of the system is equivalent to the basic state through invariance compensation, then the symmetrical load flow property is obtained, which is verified through simulation. Proportion–integration–differentiation (PID) control based on invariant compensation is used in the system, and the dynamic characteristics are almost the same. The experimental results show that the compensation control based on the invariance principle can better realize the symmetric load flow characteristics of the system within a certain range of load pressures. And the displacement responses employing invariance compensation PID control under various loads indicate that the asymmetric characteristics of the system can be basically eliminated, so the consistency of the forward and reverse responses and stability of the system are improved significantly.
Introduction
Valve-controlled asymmetric cylinder systems are widely used in industry, agriculture, national defense, aerospace, and other fields because of their large power density ratios, high control accuracies, and fast response speeds.1–3 However, the high-accuracy control of electro-hydraulic systems is still challenging owing to the highly nonlinear characteristics, the parametric uncertainties, the modeled uncertainties, and the external disturbances.4,5
Therefore, scholars have carried out many studies on this topic. A flow self-balancing hydraulic pump with three distributing windows 6 and an electrohydraulic system consisting of a servo valve and a variable pump 7 were designed to ensure consistent flow rates for the hydraulic pump and hydraulic cylinder. Considering the errors arising from valve core dead zones and cylinder asymmetries, a controller with dead zone compensation 8 and a position control method based on combining position data with closed-loop double PID control 9 were developed. A model predictive controller was proposed to resolve the problem of non-over shooting position control of the unidirectional proportional pump-controlled asymmetric cylinder system. 10 A comprehensive comparative analysis was employed to enhance the energy efficiency and position control performance of electro-hydraulic systems. 11 A novel robust backstepping control strategy was introduced to achieve high-accuracy tracking performance for electro-hydraulic servo systems without velocity information in the presence of uncertainties and disturbances. 12 In order to reduce the position tracking errors caused by the non linear problems, a model-free adaptive control method based on radial basis function neural network disturbance observer was designed for the electrohydraulic servo system. 13 A disturbance observer-based backstepping tracking control was designed for an electro-hydraulic actuator system to estimate and track reference signals in a finite time. 14 To improve the efficiency of the electro-hydraulic servo system during the task of position tracking, a nonlinear energy-saving control strategy including a variable supply pressure control and a disturbance observer was proposed. 15 Model reference sliding mode control with valve null bias compensation was presented for the electro-hydraulic shaking table system to improve the acceleration tracking performance. 16 In order to overcome the nonlinearities and uncertainties caused by friction and internal leakages, an efficient sliding mode control was designed based on the selection of appropriate sliding surface and control law for the electro hydraulic actuator system. 17 In order to suppress unknown mismatched disturbances and output chattering in valve controlled electro-hydraulic position servo system, a sliding mode back-stepping control method was proposed. 18 Cho and Noskievič 19 explored the utilization of a sliding function-based feedforward controller integrated with a feedback control system for addressing the position tracking control problem.
As reviewed above, some of the researchers focused on the precision tracking performance through various control strategies without considering the influence from the asymmetry of the forward and reverse dynamic characteristics. Zhang et al. 20 proposed a model reference variable gain adaptive control algorithm to account for the differences in performance between the extension and retraction of an asymmetric hydraulic cylinder. Wang et al. 21 designed an asymmetric pump-controlled hydraulic system with variable displacement and variable speed functions to achieve accurate control of the expansion position of a hydraulic cylinder system. In this paper, a linear load flow model of a proportional valve-controlled asymmetric cylinder system is established, and an optimal symmetric state model is obtained via calculation. An invariant compensation PID control method is proposed. Symmetrical load flow characteristics and consistent responses are achieved.
System modeling
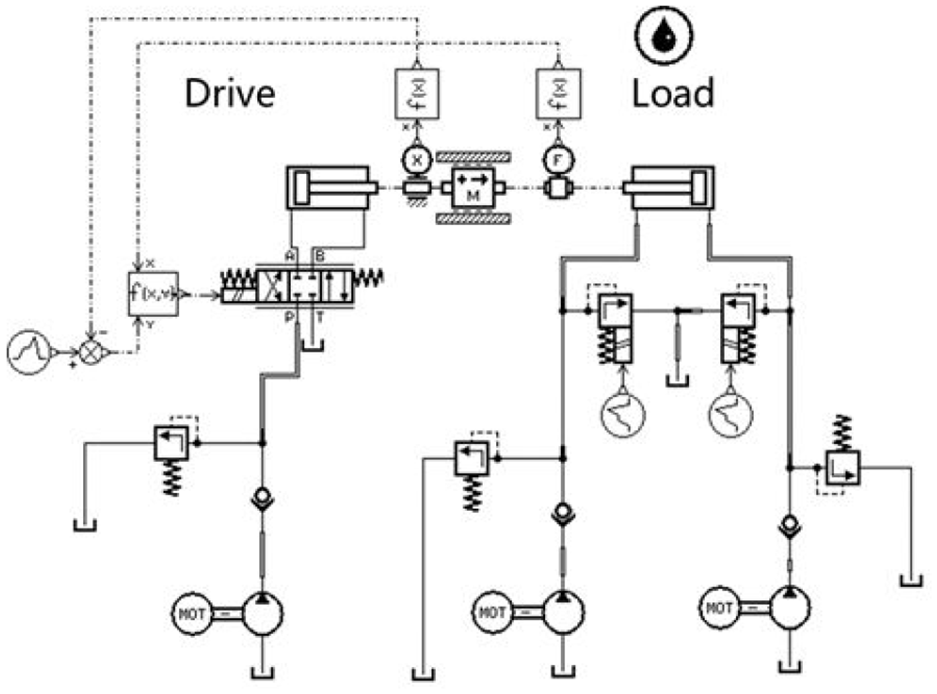
A schematic diagram the system is shown in Figure 1. Specifically, it is mainly composed of a proportional valve with superposition and an asymmetric hydraulic cylinder. Where P
R
is the return pressure of the oil, P
s
is the output pressure of the pump, ε1S, ε1R, ε2S, and ε2R are the superpositions of the proportional valve, x
V
is the proportional valve spool displacement, Q1R and Q2R are the flows out of the two cavities, Q1S and Q2S are the flows into the two cavities,

Schematic diagram of the system.
In order to simplify the analysis process, the flow leakage is ignored. Then
The load-to-flow ratio is defined as k, and
Proportional valve orifice flow modeling
The orifice flow equation into the rodless cavity can be written as

where
The orifice flow equation of out of the rodless cavity can be written as

The input saturation function is defined as follows:

In the same way, the flow equation and the input saturation function of the orifice with rod cavity can be obtained. According to equations (1)–(3), the flow model of the system can be expressed as follows.
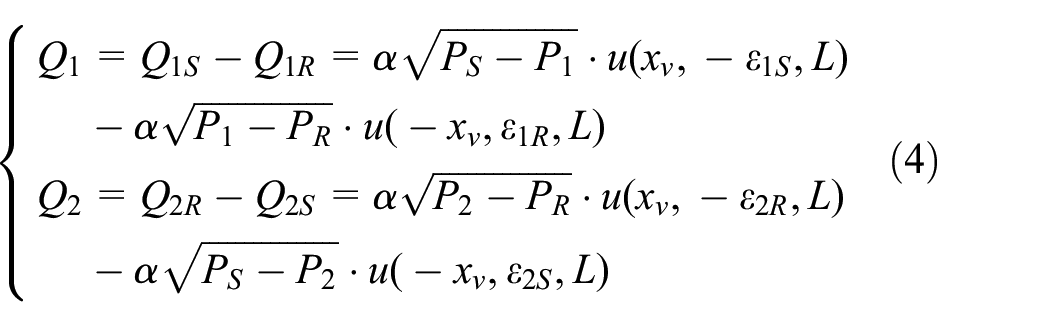
Hydraulic cylinder flow modeling
According to the flow continuity characteristics, the flow equations of the hydraulic cylinder can be written as follows:
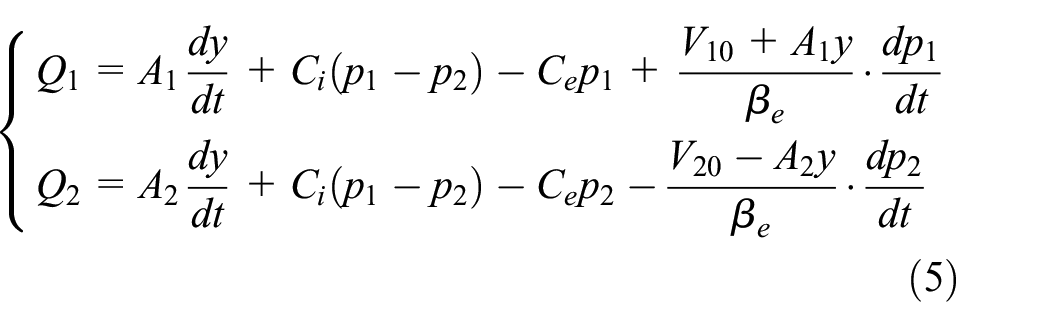
where C
i
is the internal leakage coefficient in the hydraulic cylinder; C
e
is the external leakage coefficient in the hydraulic cylinder; V10 and V20 are the volumes of the cylinder ports as the hydraulic cylinder in the middle position; and

Load flow modeling
It is assumed that the superposition parameters of the two ports match the valve spool, that is,

Equation (7) is a constraint equation with all the parameters. That is, under any valve spool displacement and load pressure, it is necessary to ensure that the equation is valid.
(1) For the negative opening proportional valve, as the valve spool opening is located in the linear region, equation (7) is always valid under the following conditions.

When the valve spool displacement is
(2) For the positive opening proportional valve, as the valve spool opening is located in the linear region, equation (7) is always valid under the following conditions.

As the valve spool displacement is shown in
According to equation (4) and equations (8) and (9), when the system actuates in the linear area of the proportional valve, the load flow can be expressed as the follow:

where
Load flow characteristic analysis and simulation
Under the given load conditions, the load flow characteristics of the system can reach a symmetrical state, which is defined as the basic state of the system. According to equation (10),

According to equations (10) and (11), the following can be obtained.

According to equation (12), k
i
and
The AMEsim simulation model of the system is shown in Figure 2. P S = 5 MPa, λ= 0.6864, P R = 0. The proportional value of forward superposition is selected, and the superposition is 10%. The load flow characteristics of the system under load pressures of 0, 1, and 2 MPa are shown in Figure 3. The figure shows that the forward load flow decreases and the reverse increases with increasing load pressure. The error between the two decreases first and then increases. With increasing error, the asymmetry of the system characteristics becomes more obvious.
Simulation model of the system.

Load flow characteristics of asymmetric systems under different load states. 1: 0 MPa; 2: 1 MPa; 3: 2 MPa; 4: basic state.
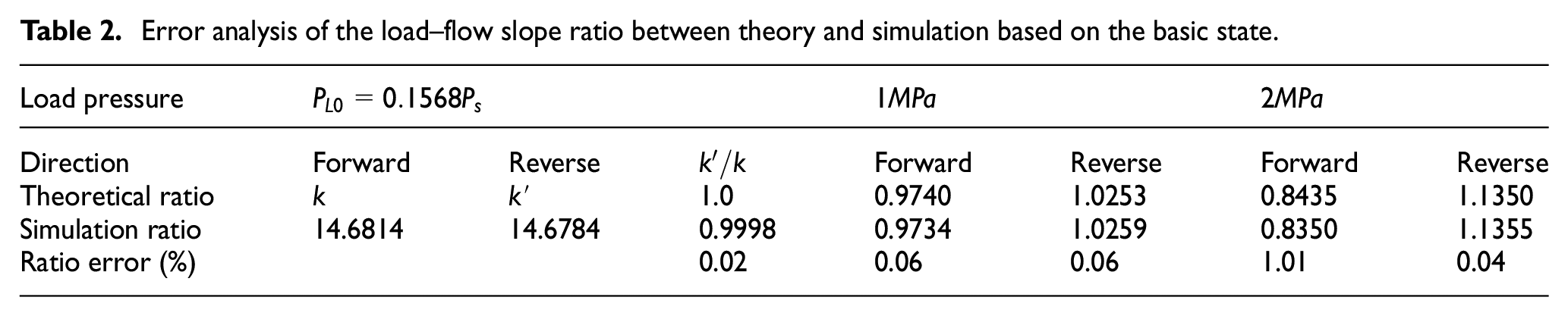
The linearity of the load flow characteristic curve is analyzed via MATLAB. The linearity is poor when the superposition is [−0.01, 0.01] and preferable when the superposition is [−∞, 0.01] and [0.01, ∞]. The Errors of the load–flow slope ratio between theory and simulation based on linear-fitted and on the basic state are shown in Tables 1 and 2 respectively. It shows that the forward error increases and the reverse error decreases. At the same time, there is an relatively large error in the ratio of forward and reverse load flow from Table 1. And it indicates that the load flow error of the system in different load states is smaller, and the error of the slope ratio of the forward and reverse load flow is avoided in no-load condition, and the load flow of the system can be described more accurately. Therefore the simulated curve slope ratio is basically consistent with the theoretical slope ratio based on basic state, which verifies the correctness of the theoretical analysis of the system characteristics.
Error analysis of the load–flow slope ratio between theory and simulation based on linear-fitted.

Error analysis of the load–flow slope ratio between theory and simulation based on the basic state.
Invariance compensation control
Invariance principle implementation
According to equation (10), the load flow equation can be expressed as follows:

Then, the transfer function of the system can be written as follows.
According to equation (14), the compensation transfer function can be selected as


Equation (16) shows that the gain in the load flow model is symmetric, and the dead zone offset is symmetric about the origin. Therefore, the system model can be regarded as a symmetric model, which is equivalent to the basic state of the system.
Invariance compensation control
Although the actual model of the system cannot be transformed, the original output of the controller can be input to the system by signal conversion, which is equivalent to the transformation of the model and realizes invariant compensation.
The control signal of the forward load flow model is adjusted by the proportional offset by comparing equations (14) and (16). The proportional value is

Similarly, the reverse model by invariance transformation can be written as

A comparison of equation (16) and equations (17) and (18) shows that the load flow model after transformed compensation is symmetric, and the load-flow characteristics of the system can be obtained.
Taking the proportional valve with a positive opening as an example, suppose that the original opening of the proportional valve is u, and the actual opening through transformation compensation is u i . According to equations (17) and (18), the following can be obtained.

A PID control block diagram of the system based on invariance compensation is shown in Figure 4.

PID control block diagram based on invariance compensation.
Experiment
An experimental schematic diagram and the experiment structure of the system are shown in Figures 5 and 6 respectively. The load pressure of the system is simulated by adjusting the overflow pressure of the two chambers.

Schematic diagram of the experiment.

Experiment structure of the system. 1. Hydraulic pump station, 2. Pressure indicator, 3. Proportional valves, 4. Proportional pressure valve, 5. Load cylinder, 6. Connecting section to the head cylinder, 7. Drive cylinder, 8. Terminal block.
The system parameters are set as follows:

Characteristics of the system at different load pressures: (a) load flow characteristics and (b) load flow errors.
The responses of the system under constant load 2 MPa is shown in Figure 8. The error is approximately 0.42 s in the rise times between the forward and reverse directions under PID control, while that of PID control based on invariance compensation is only 0.04 s. The responses of the system under ramp load and sinusoidal load from 0 to 2 MPa are shown in Figures 9 and 10 respectively. The error is approximately 3.48 and 1.98 s respectively in the rise times between the forward and reverse directions under PID control, while that of PID control based on invariance compensation is only 0.45 and 0.21 s. The results show that the response of the system can be improved with PID control based on invariant compensation, and the asymmetric characteristics can be basically eliminated. The error increases slightly with higher load pressure, but the consistency of the forward and reverse responses and stability of the system are improved significantly.

Response under constant load.

Response under ramp load.

Response under sinusoidal load.
Conclusions
The ability of a proportional valve-controlled asymmetric cylinder system to improve system performance is studied. The load flow model of the system is established, and the basic state is defined. The change rule of the flow characteristics and the relation of the load–flow curve slope ratio between different load states and the basic state are analyzed through theory and simulation. The invariance compensation method is presented. The experimental results show that PID control based on invariance compensation can realize symmetric load flow characteristics for a system in the linear region and achieve a symmetric steady-state response.
Footnotes
Handling Editor: Ibrahim Aliskan
Author contributions
The manuscript was written through contributions of all authors. And all authors have read and approved the manuscript, which is the case.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work is supported by the National Key Basic Research Development Program (2014 CB049400) and the Hunan Province Natural Science Foundation (2020 JJ7084).
Conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability
Data are contained within the article.