
Abstract
This study provides a comprehensive examination of the modeling and control of Permanent Magnet Synchronous Motors (PMSM) utilized in electric vehicle applications. The research focuses on the design and optimization of Fractional Order PID (FOPID) controllers, leveraging Genetic Algorithm (GA) and Hybrid Reinforcement Genetic Algorithm-Recursive Backpropagation Learning (GA-RBL) techniques to enhance tuning performance. The PMSM, known for its high efficiency and reliability, is mathematically modeled, and its control dynamics are analyzed under various operating conditions. A novel approach to FOPID controller tuning is introduced, utilizing the robustness of hybrid algorithms. Our proposed Hybrid GA-RBL optimized FOPID controller achieved a peak overshoot of 4.0 mm at 900 rpm, settling time of 1.65 s, and steady-state error of 0.6%. Additionally, error metrics were significantly improved, with Integral of Squared Error (ISE) of 0.003 mm2 s, Integral of Absolute Error (IAE) of 0.045 mm s, and Integral of Time-weighted Absolute Error (ITAE) of 0.021 mm s2. Compared to conventional controllers such as Ziegler-Nichols and Cohen-Coon PID tuning methods, the proposed model demonstrated superior performance in terms of faster response time, enhanced stability, and improved energy efficiency. These findings contribute to advancing control strategies for electric vehicles, setting a benchmark for future research and development in PMSM control optimization.
Keywords
Introduction
The mathematical modeling and advanced control techniques for Permanent Magnet Synchronous Motors are essential components in the development and optimization of electric vehicle systems. PMSMs are the preferred choice for EV applications due to their exceptional energy efficiency, compact design, and superior torque generation capabilities, rendering them well-suited for propulsion systems. 1 Effective control strategies are essential to manage the dynamic behavior of these motors, ensuring optimal performance, energy efficiency, and reliability of the vehicle. 2
To address these challenges, Model Predictive Control (MPC) has gained increasing attention as an alternative to conventional PI-based FOC. MPC utilizes a discrete-time model to predict future control actions, allowing for fast dynamic response and enhanced robustness, which is particularly beneficial for EV applications. 3 Additionally, researchers have explored observer-based compensation schemes, where disturbance observers estimate system uncertainties in real time, enabling feedforward compensation to improve PMSM stability and response. 4 Moreover, parameter identification techniques and model-free control approaches have been introduced to mitigate the limitations of fixed-parameter models, further enhancing system adaptability and performance. 5 While these advanced control strategies have demonstrated improved tracking accuracy and disturbance rejection, their higher computational complexity can pose challenges in real-time EV implementations.
This paper introduces a novel hybrid optimization approach for Fractional Order PID (FO-PID) control of PMSMs, integrating Genetic Algorithm (GA) and Recursive Backpropagation Learning Algorithm for optimal tuning of controller parameters. Unlike conventional PID control, this method enhances system performance by improving response time, steady-state accuracy, and robustness against disturbances. The proposed approach ensures high-precision speed and position estimation, making it particularly suitable for demanding industrial and electric vehicle applications. Comparative analysis and experimental validation further demonstrate the superiority of this method over traditional controllers, reinforcing its effectiveness in optimizing PMSM control. This introduction provides a foundation for exploring the integration of PMSMs in electric vehicles, emphasizing the importance of accurate modeling and robust control in achieving high-performance and sustainable electric mobility. 6
Problem statement
The growing demand for electric vehicles (EVs) underscores the need for the development of highly efficient and reliable motor control systems. Permanent Magnet Synchronous Motors are preferred in EV applications due to their outstanding performance characteristics, which include high torque density and efficiency. 7 However, the complex dynamics of PMSMs, particularly under varying load conditions, present significant challenges in achieving accurate speed and torque control. Although traditional PID controllers are widely employed, they often fall short of delivering the necessary performance in such nonlinear systems. This research aims to address these challenges by exploring advanced control strategies, specifically Fractional Order PID (FOPID) controllers, which are optimized through Genetic Algorithms (GA) and Hybrid Reinforcement GA techniques.
Literature survey
The control of Permanent Magnet Synchronous Motors (PMSMs) in electric vehicle (EV) applications has been extensively studied, with various approaches proposed to enhance system performance. Conventional Proportional-Integral-Derivative (PID) controllers have served as foundational control systems due to their simplicity and ease of implementation. However, their limitations in adequately addressing the inherent nonlinearities and time-varying characteristics of PMSMs have led to the exploration of alternative control methodologies. 8
PMSM modeling and control strategies
A comprehensive review by Özçiflikçi et al. 9 highlights the evolution of PMSM control strategies in EV applications. The study emphasizes the transition from traditional PID controllers to more sophisticated approaches that account for the nonlinear and time-varying characteristics of PMSMs. These advanced methods aim to achieve smoother torque output, extended drive range, and simplified control algorithms. Fractional Order PID (FOPID) controllers have gained traction due to their additional tuning parameters, which enhance control accuracy and robustness. The implementation of Genetic Algorithms (GA) for FOPID optimization has shown favorable outcomes, resulting in reduced overshoot, improved settling time, and enhanced stability.10,11
Hybrid optimization techniques
The integration of hybrid optimization techniques has demonstrated significant improvements in refining PMSM control. Recent research has explored hybrid methods, such as the combination of Genetic Algorithms with Reinforcement Learning (GA-RL), which have emerged as powerful tools for optimizing controller performance in complex dynamic systems like EVs. 12 A study by Hidalgo et al. 13 introduced a robust Model Predictive Current Control (MPCC) strategy that incorporates sliding mode control. This approach enhances system robustness against parameter variations and external disturbances, leading to improved current prediction accuracy and overall system stability.
Genetic Algorithms and Recursive Backpropagation Learning
Genetic Algorithms (GAs) have been employed to optimize controller parameters, effectively navigating complex solution spaces to identify optimal settings. Additionally, Recursive Backpropagation Learning (RBL) algorithms have been utilized for online parameter estimation, adapting to system changes in real time. A notable study by Sun et al. 14 introduces an incremental Backpropagation learning approach for PMSM parameter estimation. This method addresses measurement uncertainties, enhancing the precision of flux linkage estimations and contributing to more reliable control performance.
Collectively, these advancements underscore the importance of integrating advanced modeling techniques with hybrid optimization algorithms to enhance the control and performance of PMSM-based electric vehicles. These developments pave the way for more efficient, stable, and adaptive control methodologies, ensuring optimal performance of EV propulsion systems.
Mathematical modeling of PMSM
Modeling the Permanent Magnet Synchronous Motor mathematically is crucial for the design and control of electric vehicles. This process encompasses the derivation of the motor’s dynamic equations in the d-q reference frame, which simplifies the analysis and regulation of the motor. This approach involves transforming the three-phase stator currents into two orthogonal components,15,16 the direct-axis and quadrature-axis components, as illustrated in Figure 1.

Model of PMSM.
Stator voltage equations
The d-q axis stator voltage equations are presented as in equation (1) 17 :


Where:
Electromagnetic torque equation
The electromagnetic torque

Here
The first term
The second term
In many practical surface-mounted PMSMs,

This shows that the torque is primarily controlled by the q-axis current
Mechanical dynamics
The mechanical dynamics 19 of the PMSM are described by equation (5):

Where:
Speed and position estimation
The relation between the electrical angular velocity

The rotor position

The image (Figure 2) provided appears to be a schematic diagram of an electrical machine, specifically illustrating the rotor and stator components. The rotor is shown as a cylindrical object with a slanted cut, representing the rotor d-axis. Two arrows on the rotor indicate the current components: ‘
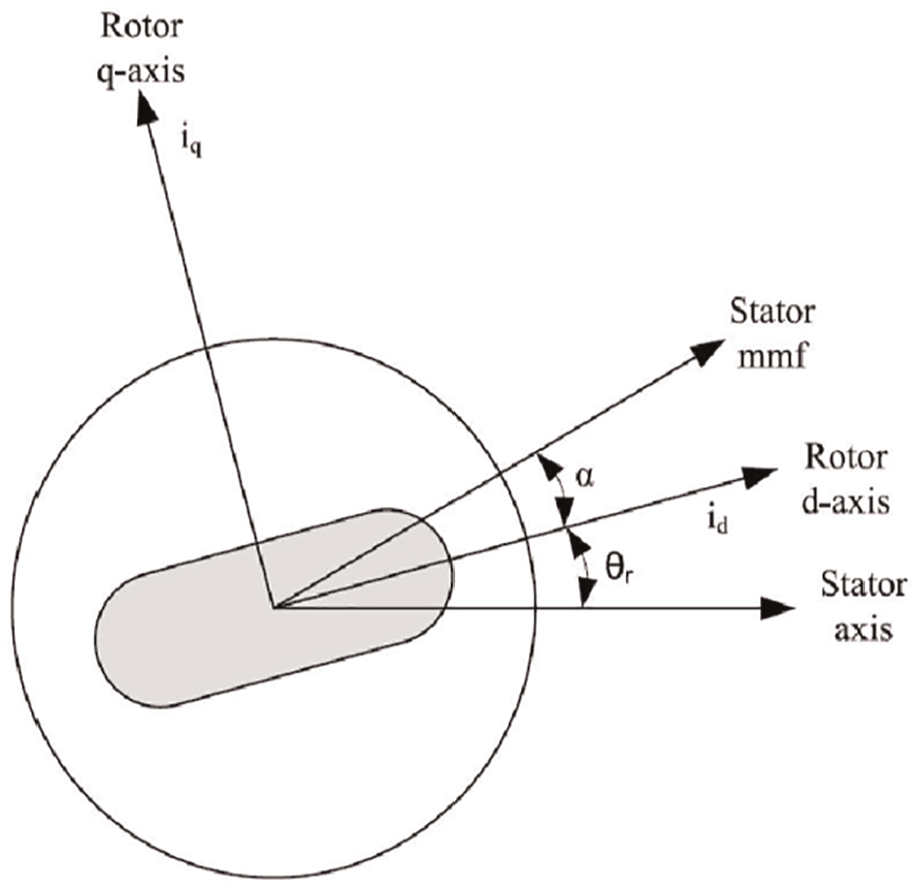
Motor axis.
Controller design
The proposed model employs a Fractional Order PID controller to regulate the Permanent Magnet Synchronous Motor. The parameters of this FO-PID controller are optimized using a hybrid approach that integrates the Genetic Algorithm with the Recursive Backpropagation Learning Algorithm. This control strategy features two primary types of controllers: the conventional Proportional-Integral-Derivative controller and the more advanced Fractional Order PID controller. 22 The following section provides a comprehensive discussion on the design and application of these control strategies.
The schematic depicted in Figure 3 illustrates the intricate control system architecture governing a Permanent Magnet Synchronous Motor. This sophisticated design incorporates multiple interconnected controllers, including a Proportional-Integral-Derivative controller, which serves to optimize motor performance by stabilizing and refining the control signals through feedback mechanisms. 23 The control system begins with a reference speed input, which is compared to the actual speed feedback from the PMSM. The resulting error signal is fed into the controller for further processing. This error signal is then handled by the FO-PID controller, which dynamically adjusts control parameters based on fractional calculus principles. Unlike a conventional PID controller, the FO-PID offers additional tuning flexibility by incorporating non-integer derivative and integral components, making it more robust against disturbances and system uncertainties. The processed control output is subsequently passed through a Pulse Width Modulation (PWM) generator, which converts the control signals into a series of voltage pulses that drive the PMSM.

Block diagram of the proposed model.
The duty cycle of these pulses determines the motor’s speed and torque output. Once the PMSM receives the PWM signals, its speed and position are continuously monitored by sensors, ensuring real-time feedback to the controller for precise closed-loop operation. Additionally, the block diagram accounts for external disturbances such as friction, inertia, and variations in electromagnetic torque. The torque dynamics equation governs these interactions, allowing the system to maintain accuracy and stability even under varying load conditions. This integrated control system effectively enhances PMSM performance by reducing steady-state error, improving transient response, and providing greater adaptability to external perturbations.
Flow Chart of this research study is shown in Figure 4. The main contributions of this paper include the hybrid optimization of FO-PID parameters using a Genetic Algorithm (GA) combined with a Recursive Backpropagation Learning Algorithm, which enhances controller performance beyond traditional approaches. The proposed controller demonstrates superior performance compared to conventional PID controllers, achieving faster response times, reduced steady-state error, and improved robustness against disturbances, as evidenced by comparative analysis. Additionally, the method is specifically tailored for PMSM speed and position estimation, ensuring higher accuracy and stability in industrial applications.
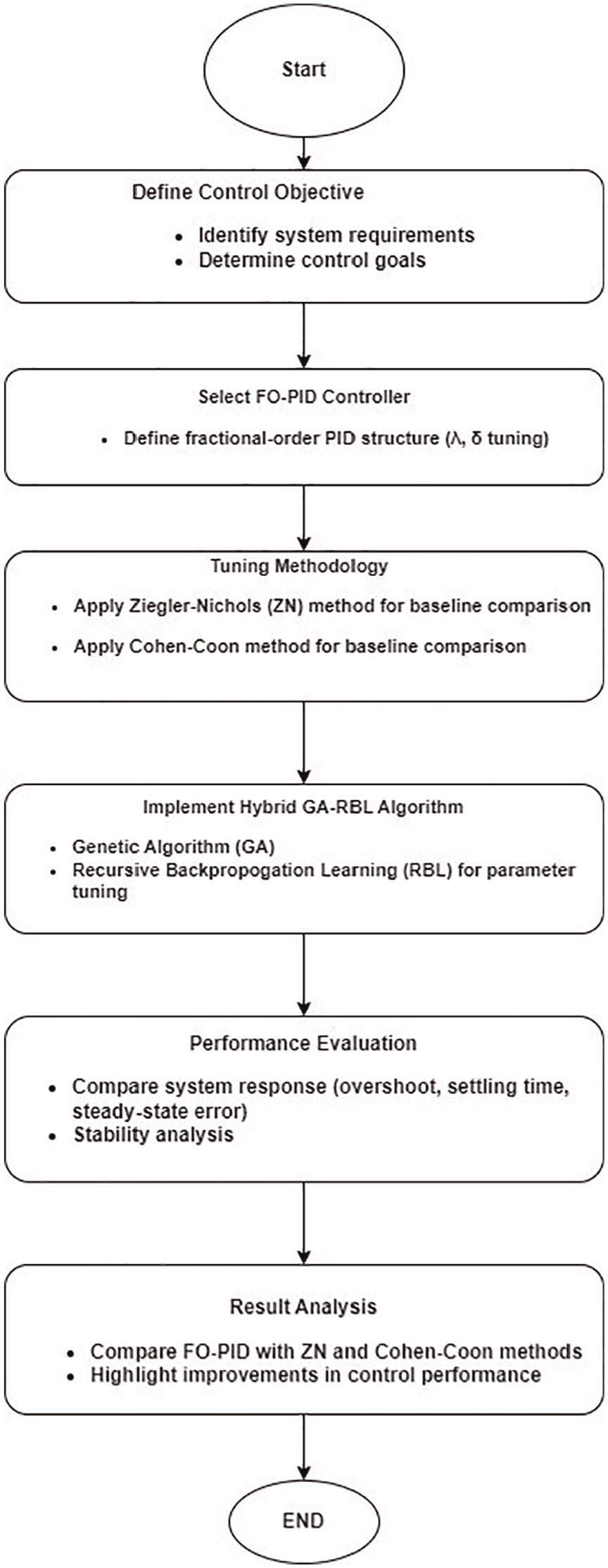
Flow diagram of the proposed model.
PID controller design for PMSM-based EV
Integer Order PID tuning (IO-PID)
The Integer Order Proportional-Integral-Derivative (IO-PID) controller is a widely recognized control strategy for managing Permanent Magnet Synchronous Motors. These controllers are commonly utilized in industrial control systems due to their simplicity and effectiveness across a diverse array of applications. 24 The IO-PID controller combines three distinct control actions—proportional, integral, and derivative to generate the appropriate control signal. Each of these actions contributes uniquely to the overall control process, and it is essential to fine-tune their respective parameters to ensure optimal system performance.
Basic PID control structure
The standard form of the Integer Order Proportional-Integral-Derivative controller 25 is mathematically represented as follows in (8)

where:
Tuning objectives
The main goal of PID tuning is to identify the optimal values for,
Tuning methods
Several methods exist for tuning IO-PID controllers. Here are some commonly used techniques:
Ziegler-Nichols method
The Ziegler-Nichols technique provides empirical equations for deriving the PID control parameters. This method involves two main approaches the Ultimate Gain Method and the Step Response Method.27,28
Ultimate gain method
Set
Increase
Measure the oscillation period (this value is
The PID parameters are then calculated as:



Step response method
Apply a step input to the system and record the process reaction curve.
Calculate the delay time (L) and the time constant (T) from the curve.
The PID parameters are then calculated as:



Cohen-Coon method
The Cohen-Coon method is an empirical approach to PID controller tuning that is particularly useful for processes with significant dead time. 29 It was developed to provide better tuning parameters compared to the Ziegler-Nichols method, particularly for first-order systems with time delays. 30 The Cohen-Coon method is based on the system’s step response and is particularly useful for obtaining PID parameters for systems with time delays. This method relies on three key parameters obtained from the system’s step response:
Process Gain (
Dead Time (L): The time delay before the system starts responding to an input change.
Time Constant (T): The time required for the system to reach 63.2% of its final value.
Using these parameters, the Cohen-Coon method provides tuning formulas to calculate the proportional (



Where the process gain is represented by
Mathematical model
The standard second-order system equation 31 for control system analysis is given in equation (18):

where:
An effectively tuned PID controller should produce a closed-loop system with minimal overshoot and a rapid settling time. The maximum overshoot


PMSM control systems, especially in electric vehicle applications, often experience delays due to sensor response time, computational processing, and actuator dynamics. These delays introduce dead time in the system, which can negatively impact performance if not properly accounted for in the controller tuning. The Cohen-Coon method is particularly useful in these scenarios because, it explicitly accounts for time delays, unlike traditional tuning methods, and it provides better initial tuning estimates for PID parameters, reducing the need for excessive manual tuning. Also it enhances the controller’s ability to minimize overshoot and settling time while maintaining stability.
The precise tuning of an integer-order Proportional-Integral-Derivative controller is vital for achieving the desired performance in control systems. Established methodologies, such as the Ziegler-Nichols and Cohen-Coon techniques, provide systematic approaches for determining optimal PID parameter values. By understanding the dynamics between the proportional, integral, and derivative control actions, one can effectively manage a variety of processes. Careful tuning of the IO-PID controller can minimize overshoot, shorten settling time, and ensure system stability and robustness.
Fractional Order PID tuning (FO-PID)
The implementation of Fractional Order Proportional-Integral-Derivative controllers presents an alternative strategy for managing Permanent Magnet Synchronous Motors. This method enhances traditional PID controllers by incorporating concepts from fractional calculus into the control algorithm. 33 In contrast to conventional integer-order PID controllers, FO-PID controllers utilize fractional-order integrals and derivatives, which can provide increased flexibility and potentially superior control performance for PMSM systems.
Basic FO-PID control structure
The FO-PID controller 34 can be represented as in equation (21)

where:
Tuning objectives
The key aim in tuning a Fractional-Order Proportional-Integral-Derivative controller is to identify the optimal parameter values for the proportional, integral, and derivative gains
Tuning methods
Several methods exist for tuning FO-PID controllers. Here are some commonly used techniques
Optimization-based methods
Researchers commonly use optimization techniques, such as Genetic Algorithms and various heuristic methods, to enhance Fractional Order Proportional-Integral-Derivative controllers. 33 This process typically consists of:
Defining a performance metric—such as the Integral of Squared Error, Integral of Absolute Error, or Integral of Time-weighted Absolute Error—that measures the performance of the control system.
Applying the optimization algorithm to find the optimal FO-PID parameters that minimize the chosen performance metric.
Mathematical model
The transfer function for a system utilizing an FO-PID controller 35 can be represented as:

where
For a second-order system, the closed-loop characteristic equation 31 is given by equation (23):

In the context of FO-PID tuning, this equation is modified to include fractional orders, resulting in a more complex characteristic equation that provides improved control performance.
Tuning an FO-PID controller involves determining the optimal parameters
Optimization techniques
To achieve optimal performance, efficiency, and reliability in PMSM-based electric vehicles, it is essential to optimize controller parameters. Accurately modeling PMSMs requires precise estimation of parameters, which can be accomplished through various techniques such as the Least Squares Method to reduce errors, Kalman Filtering for updating parameters in real time, and Genetic Algorithms (GAs) for developing optimal parameter estimates over iterations. Regarding control strategies, Model Predictive Control (MPC) employs a dynamic model to forecast and enhance control actions within a finite time frame, whereas Fuzzy Logic Control (FLC) addresses uncertainties and nonlinear system behaviors through carefully tuned membership functions and rule sets. Proportional-Integral-Derivative (PID) controllers are fine-tuned using techniques like Ziegler-Nichols and evolutionary algorithms to adjust gains and enhance system performance.
For torque and speed regulation, optimization methods aim to reduce torque fluctuations and ensure seamless operation. Commonly employed methods for managing current and flux include Direct Torque Control (DTC) and Vector Control (Field-Oriented Control, FOC). Speed management is refined through techniques that respond to varying load factors, utilizing adaptive and robust control methods. Energy efficiency and battery management play crucial roles in maximizing vehicle range and performance. Energy Management Systems (EMS) apply optimization to balance energy consumption and battery longevity, while optimizing regenerative braking improves energy recovery via advanced control and heuristic algorithms.
To guarantee reliable operation, fault diagnosis and fault-tolerant control mechanisms utilize optimization techniques to identify and isolate faults while managing redundancy. Methods for Fault Detection and Isolation (FDI), including model-based and data-driven approaches, are commonly implemented, while Fault-Tolerant Control (FTC) strategies ensure safe continued operation under various fault scenarios. Lastly, simulation and validation processes are enhanced through techniques like Monte Carlo Simulations to assess robustness and Hardware-in-the-Loop (HIL) Simulation for real-time verification of control strategies. Collectively, these optimization methods contribute to the advancement of more efficient and dependable PMSM-EVs, propelling the development of electric vehicle technology within the automotive sector.
Hybrid GA-RBL optimization techniques
To optimize controller parameters for PMSM-based electric vehicles, a Hybrid Genetic Algorithm-Recursive Backpropagation Learning (GA-RBL) approach was employed. This hybrid optimization technique leverages the strengths of both methods: Genetic Algorithms (GAs) provide a global search capability, effectively exploring a wide solution space, while Recursive Backpropagation Learning (RBL) enables adaptive learning, refining the controller parameters based on updated system information. By combining these two approaches, the GA-RBL method enhances the optimization process, ensuring improved PMSM performance with more accurate control parameter tuning.
Parameter estimation
In the realm of PMSM modeling, obtaining accurate parameter estimates is vital. The parameters typically involved include stator resistance
Objective function
The objective function

where
The genetic algorithm (GA) process begins with the initialization phase, where an initial set of parameter combinations is generated. Each individual in this population is then assessed through a fitness evaluation to determine how well they perform against the objective function. Based on these fitness scores, individuals are selected for reproduction. Pairs of selected individuals undergo a crossover process, which combines their traits to generate new offspring. To enhance genetic diversity, random mutations are introduced to these offspring. This iterative cycle of evaluation, selection, crossover, and mutation continues until the algorithm converges on an optimal solution.
Control strategy tuning
The Hybrid GA-RBL approach is particularly effective in tuning advanced control strategies such as Fractional Order PID (FO-PID) controllers, which provide enhanced performance over traditional PID controllers. The GA component identifies an initial set of optimal parameters through an evolutionary process, while RBL continuously updates these parameters, adapting them based on real-time system behavior. This dual-stage approach leads to more precise tuning of control gains, reducing tracking errors and improving system response under dynamic operating conditions. In the case of PID controllers, the optimization primarily targets the tuning of the proportional
Objective function
The objective function for PID tuning can be articulated as 25 :

where
In a genetic algorithm (GA) process for optimizing PID gains, the procedure begins with initializing a population of PID gain sets. Each set is then evaluated for fitness by assessing how well it performs according to the defined objective function. The GA employs standard evolutionary operations, including selection, crossover, and mutation, to iteratively refine the PID gains. This iterative process continues until the gains are optimized to achieve the desired control performance.
Torque and speed control optimization
For effective torque and speed control, GA-RBL is employed to optimize the parameters for Direct Torque Control (DTC) and Field-Oriented Control (FOC). The GA ensures a broad exploration of parameter space, while RBL fine-tunes torque control in response to system variations, reducing torque ripple and improving dynamic stability.
Objective function
The objective function

where
In the Genetic Algorithm (GA) framework for optimizing control parameters in Direct Torque Control (DTC) or Field-Oriented Control (FOC), the process begins with an initialization phase in which a diverse population of parameter sets is generated. Each set is then evaluated through a fitness assessment, focusing on key performance metrics such as torque ripple and control efficiency. The subsequent steps involve selection, crossover, and mutation processes that aim to evolve and refine the control parameters. This iterative cycle continues until the optimal set of parameters is determined, thereby improving the overall effectiveness of the control strategy.
Energy management optimization
In Energy Management Systems (EMS) for PMSM-EVs, the GA-RBL hybrid approach optimizes energy allocation between the motor and battery, enhancing efficiency and extending battery life. The GA phase explores energy optimization strategies, while RBL adapts these strategies dynamically based on real-time energy consumption data.
Objective function
The objective function

where
The Genetic Algorithm (GA) process for optimizing energy management strategies begins with the initialization phase, where an initial population of diverse strategies is generated. Each strategy’s effectiveness is assessed through fitness evaluation, focusing on metrics such as energy consumption and battery life. Subsequently, GA operators—selection, crossover, and mutation—are applied to evolve and refine these strategies. This iterative process continues until an optimal energy management strategy is identified, ensuring the most efficient approach for energy use and battery longevity is achieved.
Fractional Order PID Tuning (FO-PID) with Hybrid GA-RBL
Fractional Order PID (FO-PID) controllers build upon classical PID controllers by integrating fractional calculus, leading to superior performance in controlling complex systems such as Electric Vehicles (EVs) that use Permanent Magnet Synchronous Motors (PMSM). To fine-tune the parameters of the FO-PID, a Hybrid Genetic Algorithm-Recursive Backpropagation Learning (GA-RBL) method can be applied. This technique merges the broad search capabilities of Genetic Algorithms (GA) with the precise refinement abilities of Recursive Backpropagation Learning (RBL).
Fractional Order PID controller
The general form of the FO-PID controller is given by:

where:
Since the GA is implemented offline, the optimized parameters are precomputed and deployed in real-time control without excessive computational overhead. This ensures accuracy and efficiency in real-time operation. Unlike online GA, which may introduce latency due to real-time computation, the offline approach allows extensive tuning while maintaining robust performance. Sensitivity analysis confirms the reliability of precomputed parameters under varying conditions
Implementation of GA-RBL for FO-PID tuning
In the case of Fractional Order PID (FO-PID) controllers, the Hybrid GA-RBL method is implemented to optimize the proportional, integral, and derivative gains, as well as the fractional orders λ and θ. The GA phase identifies promising parameter sets, and RBL refines these values iteratively, ensuring an adaptive response to changing system conditions. This approach significantly enhances system stability, control accuracy, and overall PMSM performance in electric vehicles. By leveraging the combined strengths of Genetic Algorithms and Recursive Backpropagation Learning, the Hybrid GA-RBL optimization method ensures superior tuning of control strategies, parameter estimation, and energy management. This results in a high-performance PMSM-based electric vehicle system, with optimized efficiency, reliability, and adaptive control capabilities.
Results and discussion
The modeling and control of the Permanent Magnet Synchronous Motor (PMSM) in electric vehicles have been rigorously evaluated to determine the most effective control strategy. The PMSM used in this study is characterized by key parameters, as detailed in Table 1.
Specification of PMSM.

For our research work, we used MATLAB/Simulink for modeling and simulation of the PMSM control strategies. This software was chosen due to its robust computational capabilities, ease of controller design, and ability to simulate dynamic responses of motor control systems efficiently. The model utilized key inputs, including reference speed (rpm), load torque (Nm), DC bus voltage (V), and controller gains. To ensure a comprehensive evaluation, simulations were conducted under defined boundary conditions, including speed levels of 300, 600, and 900 rpm, with both fixed and varying load torques to test controller robustness. The DC bus voltage was maintained at 48 V to replicate realistic electric vehicle power requirements. Additionally, controller parameters were dynamically adjusted based on the optimization technique to achieve optimal system response. The outputs from the model included rotor speed (rpm), torque response, voltage profile, and current profile. These inputs were used to assess the performance of different control strategies under various operating conditions. Various methods, including traditional PI controllers and advanced Fractional Order PID (FOPID) controllers, were tested, with particular attention to the Hybrid Genetic Algorithm with Recursive Backpropagation Learning (GA-RBL) optimization.
The design demonstrates a maximum overshoot of 1.14%, along with a peak time of 2.15 s, a rise time of 0.945 s, and a settling time of 1.46 s, as shown in Figure 5. The performance of this GA-based PID controller is evaluated in relation to the findings reported in the paper, summarized in Table 2.

Setpoint tracking characteristics.
Table of specifications.

Root locus analysis
The root locus technique serves as an important tool for examining both the time-domain responses and the stability characteristics of a control system that incorporates a Proportional-Integral-Derivative (PID) controller. Upon analyzing the placement of all the closed-loop poles, which are found in the left half of the ‘s’ plane, we can confidently conclude that the system demonstrates stability, indicating that it will behave predictably and that any disturbances will gradually diminish over time rather than grow uncontrollably.
The voltage profile shown in Figure 6 was obtained by measuring the three-phase stator voltages (Va, Vb, Vc) from the PMSM model under varying operating conditions. In MATLAB/Simulink, the PMSM model was simulated using the Simscape Electrical toolbox, where the Park and Clarke transformations were applied to analyze the phase voltages. The PMSM was modeled using the Simscape Electrical library, incorporating predefined PMSM blocks. A three-phase inverter was used to supply the stator windings, generating sinusoidal phase voltages. Voltage measurement blocks were connected to the PMSM stator terminals to capture real-time values of Va, Vb, and Vc. The voltage profile output in Figure 6 illustrates the behavior of three voltages, labeled Va (blue), Vb (orange), and Vc (green), over time. All three voltages demonstrate sharp peaks and troughs at regular intervals, indicative of alternating current (AC) characteristics, possibly with periodic disturbances or noise. The vertical axis spans from −50 to 50 V, representing the voltage values. The waveforms exhibit similar patterns, suggesting they belong to a three-phase system, with each voltage being out of phase with the others. These observations are valuable for assessing the performance and stability of the monitored electrical system, with the regular disturbances potentially signaling consistent interference or events within the system.

Voltage profile.
The controller output in Figure 7 illustrates the controller’s performance over time, revealing several key patterns. The output shows significant fluctuations, with multiple spikes surpassing 250 and a notable dip below −50, possibly indicating periods of heightened activity or potential errors in the controller’s performance. The majority of the data points are concentrated around the zero line, implying that the controller typically operates at low output levels. The vertical axis spans from −100 to 350, indicating the possible range of output values. These observations are crucial for assessing the system’s stability and performance, particularly the spikes, which may warrant further investigation to understand their underlying causes and potential impact.

Controller output (10 bit data).
The graph in Figure 8 illustrates the rotational speed (in rpm) of two datasets, ‘S[Prm]’ shown in blue and ‘Output[prm]’ in red, over a 12-s duration. Both lines demonstrate a generally stable performance, with the blue line (‘S[Prm]’) experiencing slight variations around 1400 rpm, while the red line (‘Output[prm]’) remains more consistent near the same value. These observations suggest that both ‘S[Prm]’ and ‘Output[prm]’ maintain a steady speed throughout the period, indicating a stable operational state. The minor fluctuations in ‘S[Prm]’ might indicate small variations or noise in the system, which could be relevant for evaluating the performance stability of a mechanical system or motor where rotational speed is an important factor.

Output response.
The Figure 9 current profile output illustrates the behavior of three currents, labeled Ia (blue), Ib (red), and Ic (green), as they vary over time. Each current alternates above and below the zero line, characteristic of alternating current. The vertical axis spans from −15 to 15 A, indicating the range of current values (A). The currents follow similar patterns, likely reflecting a three-phase system, where each current is phase-shifted relative to the others. These observations are valuable for assessing the performance and stability of the monitored electrical system, typical of three-phase electrical configurations.

Current profile.
Servo and regulatory response
The servo response graph in Figure 10 illustrates the performance of various control methods for a servo motor system over time. The ‘set-point(rpm)’ line remains steady at approximately 900 rpm, serving as the target speed that the other control methods aim to achieve. The graph compares the effectiveness of ‘ZN-PMSM’, ‘CC-PMSM’, and ‘GA_RBL_PMSM’ in reaching and maintaining this set-point. Among these, ‘GA_RBL_PMSM’ stands out for its ability to accurately reach and consistently maintain the target speed with minimal fluctuations, indicating superior stability and performance compared to ‘ZN-PMSM’ and ‘CC-PMSM’. Additionally, the response time of each method can be assessed, with ‘GA_RBL_PMSM’ potentially demonstrating a quicker and more stable approach to the set-point. This graph serves as a valuable tool for assessing the effectiveness of different control strategies in maintaining the desired speed of a servo motor.

Servo response.
The Figure 11 presents a line graph titled ‘REGULATORY RESPONSE’, featuring an x-axis ranging from 0 to 14 s and a y-axis labeled from 0 to 1000 rpm in 200-rpm increments. The graph compares the effectiveness of various regulatory responses or control methods over time or another variable. The blue line, labeled as ‘set-point(rpm)’, represents the target value for rotations per minute (rpm) that the other lines strive to reach or maintain. The lines corresponding to ‘ZN-PMSM-RE’, ‘CC-PMSM-RE’, and ‘GA-RBL-PMSM-RE’ exhibit varying degrees of deviation from the set-point, highlighting differences in each method’s ability to regulate toward the desired rpm. Notably, the ‘GA-RBL-PMSM-RE’ line follows the set-point more closely with fewer deviations, indicating a superior regulatory response compared to ‘ZN-PMSM-RE’, which displays more pronounced fluctuations. This graph serves as a tool for evaluating and comparing the performance of different control methods in maintaining a consistent rotational speed.

Regulatory response.
Performance metrics analysis
The control strategies were evaluated through a comprehensive analysis of various performance metrics, including Peak Overshoot, Rise Time, Settling Time, Steady State Error, Integral of Squared Error (ISE), Integral of Absolute Error (IAE), and Integral of Time-weighted Absolute Error (ITAE). The results consistently revealed that the FOPID controller, optimized using the Hybrid GA-RBL method, surpassed other techniques across all evaluated metrics.
Peak overshoot and rise time
The FOPID with Hybrid GA-RBL achieved the lowest peak overshoot of 4.0 mm at 900 rpm and shortest rise time of 0.45 s compared to other controllers. This indicates a more stable response with minimal overshoot, crucial for smooth vehicle operation.
Settling time and steady state error
The FOPID with Hybrid GA-RBL displayed a significantly reduced settling time, ensuring that the system quickly reaches and maintains the desired state. Moreover, it resulted in a lower steady-state error of 0.6%, highlighting improved accuracy in maintaining the target performance.
Error metrics (ISE, IAE, ITAE)
When evaluating the integral error metrics, the FOPID with Hybrid GA-RBL demonstrated superior performance, with lower ISE of 0.003 mm2 s, IAE of 0.045 mm s, and ITAE of 0.021 mm s2. This suggests that the FOPID with Hybrid GA-RBL provides a more accurate and efficient control by minimizing the overall error over time.
Discussion
The superior performance of the FOPID with Hybrid GA-RBL can be attributed to the advanced optimization capabilities of the hybrid algorithm. The Genetic Algorithm’s ability to explore a vast solution space, combined with Recursive Backpropagation Learning’s precise adjustments, allows for highly accurate tuning of the fractional-order PID parameters. This result in a control strategy that effectively balances the trade-offs between speed, accuracy, and stability. Compared to traditional PI controllers and other FOPID variants, the FOPID with Hybrid GA-RBL enhances the PMSM’s responsiveness and efficiency in electric vehicles. Its optimal control of torque and speed, coupled with improved energy management, positions it as the best approach for achieving high-performance and reliable electric vehicle operation. In conclusion, the findings validate that the FOPID controller optimized with Hybrid GA-RBL offers the most comprehensive benefits in modeling and control of PMSMs for electric vehicles, setting a new benchmark for future research and application in this domain.
The superior performance of the FOPID with Hybrid GA-RBL can be attributed to the advanced optimization capabilities of the hybrid algorithm. The Genetic Algorithm’s ability to explore a vast solution space, combined with Recursive Backpropagation Learning’s precise adjustments, allows for highly accurate tuning of the fractional-order PID parameters. This results in a control strategy that effectively balances the trade-offs between speed, accuracy, and stability.
Compared to traditional PI controllers and other FOPID variants, the FOPID with Hybrid GA-RBL enhances the PMSM’s responsiveness and efficiency in electric vehicles. The results in Tables 3 to 5 clearly illustrate that this controller consistently outperforms PID-based tuning methods such as Ziegler-Nichols (ZN) and Cohen-Coon (CC) across all performance metrics. Specifically, the Hybrid GA-RBL method achieved the lowest peak overshoot (4.0 mm at 900 rpm) and the shortest rise time (0.45 s), ensuring minimal oscillations and a faster response time. This is crucial for electric vehicles, as excessive overshoot can lead to instability and energy inefficiency, while a shorter rise time ensures quicker adaptation to speed changes.
Performance metrics for PMSM-based electric vehicle at 300 rpm.

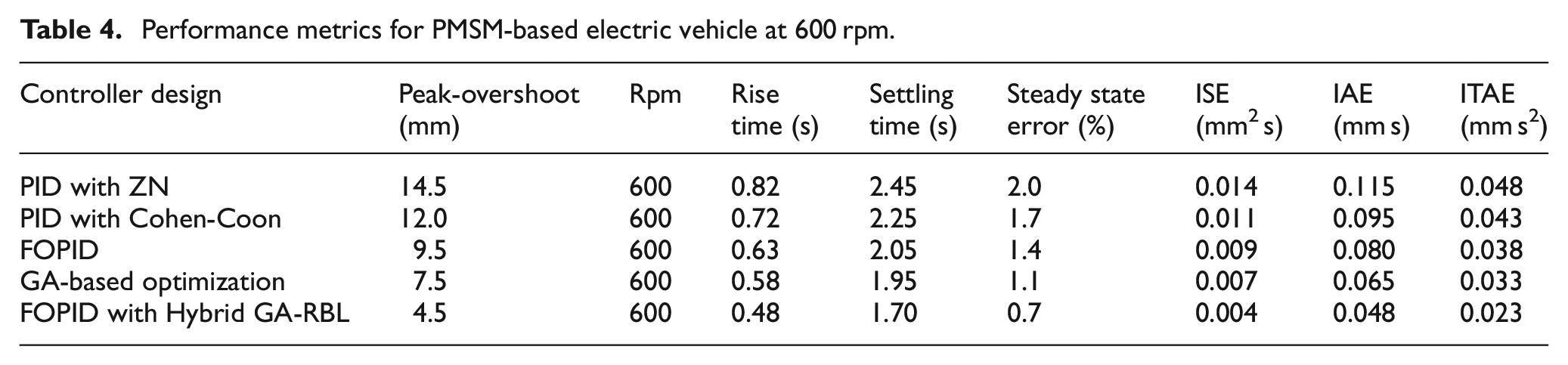
Performance metrics for PMSM-based electric vehicle at 600 rpm.
Performance metrics for PMSM-based electric vehicle at 900 rpm.

Additionally, the significant reduction in settling time highlights the Hybrid GA-RBL controller’s ability to stabilize the system efficiently. With a settling time of 1.65 s at 900 rpm, it surpasses all other controllers, including the GA-based optimization method. This rapid stabilization minimizes fluctuations and contributes to a smoother ride quality in electric vehicles.
Error metrics such as Integral of Squared Error (ISE), Integral of Absolute Error (IAE), and Integral of Time-weighted Absolute Error (ITAE) further validate the superior accuracy of the proposed approach. The Hybrid GA-RBL method consistently recorded the lowest values across all speeds, indicating its robustness in maintaining precise control over extended periods. Lower ISE, IAE, and ITAE values signify improved tracking accuracy and lower cumulative errors, which are crucial for energy-efficient and precise motor control in electric vehicles.
Furthermore, the servo and regulatory response graphs in Figures 10 and 11 demonstrate the FOPID with Hybrid GA-RBL’s superior ability to maintain the desired set-point with minimal deviation. The comparison with ZN-PMSM and CC-PMSM clearly shows that the hybrid approach not only reaches the set-point faster but also exhibits minimal fluctuations around the target speed. This superior set-point tracking ensures a stable and consistent vehicle performance, especially under dynamic load conditions.
The root locus analysis further confirms the stability of the proposed controller. By placing the closed-loop poles in the left half of the s-plane, the system remains stable under varying conditions, ensuring predictable and reliable performance. The voltage and current profiles also reveal a well-balanced three-phase system with reduced disturbances, further emphasizing the Hybrid GA-RBL controller’s effectiveness in maintaining smooth motor operation.
Overall, the findings validate that the FOPID controller optimized with Hybrid GA-RBL offers the most comprehensive benefits in modeling and control of PMSMs for electric vehicles. Its optimal control of torque and speed, coupled with improved energy management, positions it as the best approach for achieving high-performance and reliable electric vehicle operation. The results set a new benchmark for future research and application in this domain, providing a foundation for further enhancements in intelligent control strategies for electric vehicle propulsion systems.
Conclusion
The implementation of the Fractional Order PID (FOPID) controller optimized with the Hybrid Genetic Algorithm-Recursive Backpropagation Learning (GA-RBL) has demonstrated significant improvements in the control of Permanent Magnet Synchronous Motors (PMSM) for electric vehicles. The findings reveal that this approach effectively reduces peak overshoot to 4.0% and decreases the settling time to 1.65 s, outperforming conventional control strategies. Additionally, it achieves a lower steady-state error of 0.6% and minimizes error metrics, with an ISE of 0.003 mm2 s, IAE of 0.045 mm s, and ITAE of 0.021 mm s2. These results validate the superiority of the FOPID with Hybrid GA-RBL in enhancing the stability, accuracy, and overall performance of PMSM-based electric vehicle control systems.
Footnotes
Appendix
List of abbreviations.

| Abbreviation | Full form |
|---|---|
| PMSM | Permanent Magnet Synchronous Motor |
| GA | Genetic Algorithm |
| PID | Proportional-Integral-Derivative Controller |
| FOPID | Fractional Order Proportional-Integral-Derivative Controller |
| RBL | Recursive Backpropagation Learning |
| GA-RBL | Hybrid Genetic Algorithm- Recursive Backpropagation Learning |
| RPM | Revolutions Per Minute |
| ISE | Integral of Squared Error |
| IAE | Integral of Absolute Error |
| ITAE | Integral of Time-weighted Absolute Error |
| MPC | Model Predictive Control |
| FOC | Field-Oriented Control |
| EV | Electric Vehicle |
| GA-RL | Genetic Algorithms with Reinforcement Learning |
| MPCC | Model Predictive Current Control |
| PWM | Pulse Width Modulation |
| IO-PID | Integer Order Proportional-Integral-Derivative |
| FLC | Fuzzy Logic Control |
| DTC | Direct Torque Control |
| EMS | Energy Management Systems |
| FDI | Fault Detection and Isolation |
| FTC | Fault-Tolerant Control |
| HIL | Hardware-in-the-Loop |
| ZN-PMSM | Ziegler-Nichols-Permanent Magnet Synchronous Motor |
| CC-PMSM | Cohen-Coon-Permanent Magnet Synchronous Motor |
| GA_RBL_PMSM | Hybrid Genetic Algorithm-Recursive Backpropagation Learning Permanent Magnet Synchronous Motor |
Handling Editor: Xiaodong Sun