
Abstract
The vibration model of the neo-Hookean DEB has a negative index nonlinearity which poses a solution problem for perturbative methods and most non-perturbative methods. In this paper, an accurate solution of the large-amplitude asymmetric vibrations of a dielectric elastomer balloon (DEB) made up of neo-Hookean material was derived using the continuous piecewise linearization method (CPLM), which was shown to handle the negative index nonlinearity smoothly. The accuracy of the CPLM was verified using published analytical results which showed that the CPLM was significantly more accurate than the published analytical results. The CPLM solution was used to conduct parametric analysis of the large-amplitude vibration of the DEB. The results revealed that increasing either of the applied voltage or static internal pressure results to lesser stiffness response, lower frequency of vibration, lower maximum kinetic energy and shorter range of initial stretch values for stable vibrations. Hence, the applied voltage and static internal pressure can be used as design parameters for neo-Hookean DEBs capable of stable large-amplitude vibrations.
Keywords
Introduction
The exploration of electricity’s potential to deform solid materials has a rich history dating back to the late 18th century when scientists were experimenting with overcharged Leyden jars, which are devices that store electric charge. These jars were discovered by Georg von Kleist and Pieter van Musschenbroek of Leiden. The late 19th century saw Wilhelm Conrad Röntgen, who discovered X-rays, invent the first dielectric elastomer by coating a rubber sheet with metal electrodes. Röntgen used a natural rubber elastomer stripe, with 16cm width and 100 cm length, which he pre-stretched by a weight to approximately twice its initial length. He then charged the two surfaces of the elastomer with opposite charges by means of a corona discharge. Attractive forces between the opposite electric charges caused the rubber band to thin down in thickness and to expand in length resulting in a 10% increase of the initial length. 1 It wasn’t until the late 20th century that dielectric elastomers began to garner significant attention as smart materials with potential applications as sensors, actuators, and generators. Pelrine et al. 2 reported that films of dielectric elastomers, such as silicones, can be used to create electrical actuators. These films were coated with a flexible electrode material on both sides. When voltage was applied, the film was compressed and expanded due to electrostatic forces, resulting in strains of up to 30%–40%. It was found that pre-straining the film could enhance their performance. With silicone elastomers, actuated strains of up to 117% were achieved, and with acrylic elastomers, strains of up to 215% were achieved using both bi-axially and uni-axially pre-strained films.
In the field of electroactive polymer research, much study has been devoted to dielectric elastomers (DE). Dielectric elastomer actuators are polymer films sandwiched between two compliant electrodes. When a voltage difference is applied on the compliant electrodes, it causes a compression in thickness of the polymer film and a stretching in its area. Dielectric elastomer actuators possess several desirable qualities such as high energy density, low power requirement, large strain displacements and fast response time, making them suitable for a wide range of applications at the micro- and macro-scale. Applications of DE include soft robotics, synthetic muscle-like actuators, haptic devices, reciprocating or peristaltic pumps, loudspeakers, tunable diffraction grating for telecommunication and display devices, acoustic actuators, and adaptive optical devices.3–5
In the last two decades research efforts to understand the quasi-static and dynamic response of dielectric elastomers have increased rapidly. Key to this endeavour is the accurate prediction of the constitutive behaviour of elastomers, which are inherently hyperelastic. The most common models used to predict the deformation of elastomers are the Ogden family of
Zhu et al. 13 investigated the dynamic behaviour of a dielectric elastomer balloon (DEB) based on the neo-Hookean hyperelastic model. They found that the DEB resonates at multiple values of the frequency of excitation giving rise to super-harmonic, harmonic, and sub-harmonic responses. They also predicted the existence of jump and hysteresis in the amplitude due to continuous variation of the excitation frequency. Yong et al. 14 investigated the dynamics of a thick-walled dielectric elastomer spherical shell and derived an explicit analytical equation of motion for the spherical shell based on simple geometrical and spherical capacitor assumptions. Liang and Cai 15 investigated the shape bifurcation of a spherical DEB under the actions of internal pressure and electric voltage. Using linear perturbation analysis, they demonstrated that a spherical DEB can bifurcate to a non-spherical DEB under certain electromechanical loading conditions. From the analysis of the variation of the free energy of the DEB, they showed that the DEB can be energetically stable or unstable depending on the electromechanical loading conditions. Chen et al. 16 studied the dynamic electromechanical instability of a DEB subject to parametric voltage excitations. They observed that the DEB experienced dynamic electromechanical instabilities over a wide range of excitation frequencies, in the form of snap-through or snap-back, provided a critical voltage was exceeded. Jin and Huang 17 proposed a stochastic differential equation (SDE) to examine the random response of a DEB. They derived an analytical solution based on stochastic averaging technique and the results of the analytical solution agree with results of Monte Carlo simulation. Wang et al. 18 presented a theoretical model to investigate the effect of strain-stiffening on the nonlinear vibration of a circular DE membrane subjected to electromechanical loading. They applied the Gent model for elastomers and investigated the free vibration of the circular DE membrane under parametric perturbations due to applied sinusoidally alternating voltage. They solved the vibration model numerically and predicted the existence of bifurcations, bi-stable vibrations and chaotic vibrations. Liang and Cai 19 developed a finite element model to study the occurrence a new instability mode that can cause localized failure. The new instability results to a localized bulging-out of the DEB, which is consistent with the experimental results in Li et al. 20 Lv et al. 21 proposed a theoretical model for a balloon actuator taking into account the effects of strain stiffening and damping force. They investigated the occurrence of snap-through or snap-back, bi-stable vibrations and chaotic vibrations in the presence of viscous damping. Liu and Zhou 22 investigated the nonlinear oscillation of viscoelastic dielectric elastomers (DEs) subject to alternating voltage. They derived the vibration model based on Lagrange method, neo-Hookean constitutive behaviour and non-equilibrium thermodynamics. The vibration model was solved using a combined shooting and arc-length continuation numerical method. Their results showed the existence of bifurcation, jump phenomenon, super-harmonic resonance, softening behaviour and hysteresis. Mao et al. 23 exploited the biasing fields to tune the three-dimensional small-amplitude free vibrations of a soft thick-walled electroactive spherical balloon. They applied both the neo-Hookean and Gent electroelastic models and showed that their analytical solutions account for radial breathing, torsional and any other spheroidal modes of vibration. Alibakhshi and Heidari 24 applied the Gent-Gent hyperelastic model to examine the nonlinear vibration of a DEB with strain-stiffening and second invariant of the Cauchy-Green deformation tensor. They identified the chaotic interval for critical parameters of the DEB and determined that the second invariant parameter could suppress the chaotic motion of the DEB. Alibakhshi et al. 25 used the generalized neo-Hookean model of Anssari-Benam and Bucchi 11 to investigate the nonlinear vibration and stability of a spherical DEB. They determined that the molecular structure of the DEB material can influence the critical voltage for pull-in or snap through instability, chaos and quasi-periodicity. They concluded that the DEB tends to be more stable and less prone to chaos when strain stiffening occurs early in the deformation of the DEB.
The studies on the nonlinear vibrations of DEBs discussed so far were conducted using numerical methods. In contrast, only few studies have been conducted using approximate analytical techniques. The main reason is that the hyperelastic model of the DEB has a negative power nonlinearity (or non-polynomial nonlinearity) that is not amenable to most approximate analytical methods, especially those methods that rely on asymptotic series expansion. However, some successful attempts have been made to use approximate analytical techniques because of the benefit of providing additional insight of the vibration response that may not be obvious from the numerical solution. Tang et al. 26 used the Newton Harmonic Balance (NHB) method to estimate the dynamic response of a freely vibrating DEB with neo-Hookean hyperelastic model. They compared the NHB results with numerical results and found that the second-order NHB gave accurate results for a stretch ratio of up to 2.5. Beyond this stretch ratio, they recommended the use of higher order approximations that are algebraically tedious to derive. Follow-up studies on the free vibration of the DEB in the presence of strain-stiffening effect were conducted in Tang et al. 27 The NHB was used to examine the frequency-amplitude response, which showed that the frequency reduces as the pressure or voltage increases. They also investigated the stability of the DEB and the analysis revealed the presence of a stable centre and a saddle node. Alibakhshi and Heidari 28 applied the multiple scales method (MMS) to estimate the vibration response of a DEB modelled as a neo-Hookean material. They used the Taylors’ series expansion to transform the vibration model to a nonlinear ODE with quadratic and cubic nonlinearities, which enabled solution using MMS. They predicted the occurrence of jump phenomenon and softening behaviour in the DEB. Wang et al. 29 investigated a viscously damped parametrically excited DEB vibration model using the incremental harmonic balance (IHB) method. They applied the neo-Hookean model to describe the deformation of the DEB and combined the IHB with the arc-length continuation technique to obtain periodic solutions of the DEB. Their results showed an improved accuracy over the classical harmonic balance method.
The existing approximate analytical solutions are limited to weakly or moderately nonlinear responses and are not able to capture accurately the strong nonlinear asymmetric oscillations inherent in the large-amplitude vibrations of the DEB. 26 Estimating the large-amplitude vibrations of the DEB is important for predicting the vibration responses occurring close to the snap-through failure conditions. Under these conditions, strong nonlinear effects are at play due to hyperelastic effects. This underscores the need for the derivation of more accurate approximate analytical solutions capable of capturing the strong nonlinear hyperelastic effects during large-amplitude vibrations. In this article, the continuous piecewise linearization method (CPLM) was applied to obtain accurate periodic solutions for a large-amplitude DEB with neo-Hookean deformation behaviour. The CPLM was chosen because of its simplicity and ability of produce very accurate results irrespective of the complex nature of the restoring force of the vibrating system. The derived CPLM solution was validated by comparing with results of standard numerical solutions and the NHB. Furthermore, a stability analysis was conducted to examine the stable and unstable equilibrium points, and then, a parametric analysis was conducted to analyse the effects of the static internal pressure and DC voltage on the large-amplitude vibration response of the DEB. The remainder of the article is arranged as follows. In Section ‘System description and model derivation’, a brief description of the DEB and derivation of the vibration model was presented. In section ‘Solution methodology’, the CPLM solution algorithm was presented and applied to solve the DEB model whereas the results were discussed in Section ‘Discussion of results’. The conclusions of the study and areas for further improvement were discussed in Section ‘Conclusions’.
System description and model derivation
The dynamic inflation of dielectric elastomers with neo-Hookean deformation behaviour and having different shapes has been extensively studied. Figure 1 shows a spherical balloon of radius

The state of a spherical DEB before and after applying static pressure and DC voltage.
In the presence of an applied pressure (

On the other hand, the electric displacement is defined as the charge per unit area of the spherical DEB and is given by the equation:

The work done on the system consists of the electric work due to electric charge variation, the isobaric work due to variation in the radius at constant pressure, and the inertia work due to variation in the radius of the DEB mass. When the charge on the electrode has a small variation,

where

From thermodynamics considerations,
13
the free energy of system is determined by two independent variables, the stretch (

From equation (4) and (5) the following partial derivatives are applicable:


Equation (6a) represents the force balance while equation (6b) represents the electrostatic balance.
The free energy function of the dielectric elastomer based on the neo-Hookean constitutive behaviour is given as 27 :

where

where

The restoring force of the DEB is a function of three independent variables, that is
Solution methodology
CPLM solution for neo-Hookean DEB vibration model
The CPLM is a non-perturbative iterative approximate analytical technique for the periodic solution of nonlinear conservative systems. The methodology of the CPLM was initially proposed by Big-Alabo et al. 30 in a similar algorithm called the force-indentation linearisation method (FILM). Nevertheless, the application of the methodology to derive the periodic response of nonlinear conservative oscillators, which is now called the CPLM, was first carried out by Big-Alabo. 31 The CPLM is based on the concept of piecewise discretization and linearization of the nonlinear restoring force. The linearized restoring force results to a linearized equation of motion whose analytical solution gives an approximate solution of the nonlinear model over the range of discretization. The iteration of the CPLM procedure automatically updates the solution of the linearized equation from one discretization to the next, thereby producing an unconditionally-stable solution for any nonlinear conservative oscillator. 32 The CPLM has been used to study the asymmetric vibrations of a ship roll motion 33 and a functionally graded microbeam 34 , but it has not been applied for an asymmetric oscillator with negative power nonlinearity as in the present case.
For conservative systems undergoing asymmetric vibrations, the discretization of the nonlinear restoring force is done over a half cycle, that is, (

At the amplitudes, the stretch rate

Typical variations of the asymmetric amplitude (
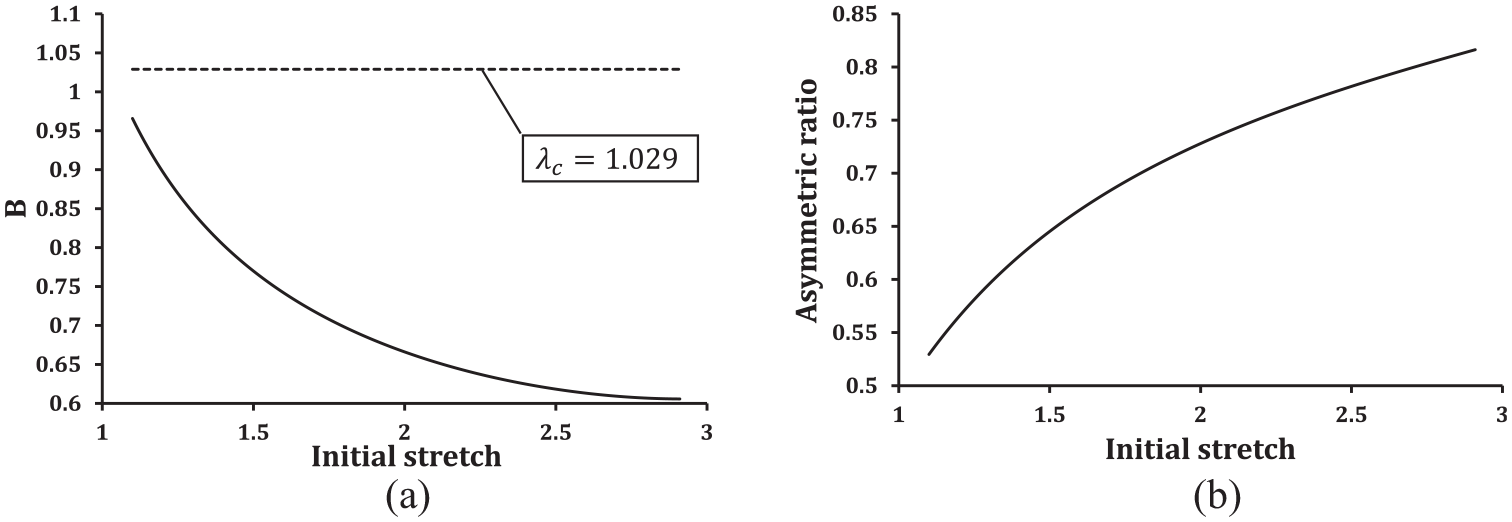
Variation of asymmetric amplitude and asymmetric ratio with initial stretch:
The roots of equation (10) give the equilibrium points (

The stability condition is such that if

Stability analysis of neo-Hookean DEB vibration model: (a) stable equilibrium, (b) unstable equilibrium, (c) saddle-node bifurcation.
Conventionally, the discretization procedure of the CPLM is based on

where r and

Substituting eq. (13) in (9) gives the linearized equation of motion for each discretization as:

The solution to equation (15) depends on whether the sign before
Positive linearized stiffness,
The solution to equation (15) when

where

The other solution parameters for this half-cycle are:


where
Basically, the CPLM derives the corresponding time solutions for points on the closed loop of the exact state-space solution. In other words, the CPLM generates the solution array (
On the other hand, the initial conditions for the second half-cycle that moves from

The other solution parameters for this half-cycle are:

Negative linearized stiffness,
The solution to equation (15) when

where


The time range for each discretization was obtained by applying the end conditions to the solution in equation (22). Thus,
where
Finally, the nonlinear frequency of the asymmetric vibrations of the DEB can be determined as:

The CPLM procedure discussed above was developed into a pseudocode algorithm (see Appendix) which was implemented as a bespoke Mathematica code to simulate results.
Evaluation of the strength of the nonlinearity of the DEB vibration model
Nonlinear oscillators exhibit various degrees of nonlinearity depending on the values of the stiffness parameters and the amplitude of vibration. The degree of nonlinearity is important because it can inform the choice of the approximate analytical solution that should be applied. The reason is that many approximate analytical solutions do not give accurate prediction of the vibration response for stiff or strong nonlinear systems. The degree of nonlinearity is usually categorized as weak, moderate or strong nonlinearity. For most of the literature, such distinctions have been made arbitrarily and usually on the basis of what is considered a small- or large-amplitude vibration. Big-Alabo 35 proposed a simple energy-based criterion to objectively evaluate the degree of nonlinearity of a nonlinear oscillator based on its amplitude of vibration and stiffness parameters. The criterion is based on comparing the potential energy of the nonlinear oscillator with that of an equivalent linear oscillator. The relative error between these two energy values was applied to determine the degree of nonlinearity.
The asymmetric vibration of the DEB has displacement limits at

where

The equivalent linear oscillator can be written as:

where

Since
Therefore, the potential energy of the equivalent bi-linear oscillator is:

where

According to the energy-based criterion
35
:
Typical plots of the compliance response and the potential function of the neo-Hookean DEB vibration model are shown in Figure 4. These plots show the strong nonlinear and asymmetric nature of the DEB vibrations. Figure 5 plots the relative error to evaluate the nonlinear strength of the DEB vibration model based on equation (32). If

(a) Compliance response and (b) potential function of the neo-Hookean DEB vibration model:

Estimating the nonlinear strength of the neo-Hookean DEB vibration model:
Discussion of results
In this section, the results of the present study were discussed. In the first instance, the accuracy of the derived CPLM solution was tested using conventional numerical solutions (Runge-Kutta method) as a reference solution. Also, comparison with the NHB was conducted. Then, the effects of the static pressure and voltage on the large-amplitude vibration were discussed. In all cases, the input parameters used were
Verification of accuracy of CPLM solution
The convergence test was carried out to determine the optimum number of discretization that produces less than 0.1% relative error in the CPLM time period estimate during large-amplitude vibrations. The results of the test for

Convergence of the CPLM time period solution.

Comparison of CPLM and NHB for small-amplitude (

Comparison of CPLM and NHB for moderate-amplitude (

Comparison of CPLM and NHB for large-amplitude (

Comparison of CPLM and NHB for very large-amplitude (
It can be observed that the error in the CPLM displacement solution in Figures 8 to 10 peaks around the asymmetric amplitude. When
Parametric analysis of the vibration response of the neo-Hookean DEB
The effect of the critical parameters on the large-amplitude vibration response of the neo-Hookean DEB was examined. Specifically, the effects of the static internal pressure and DC voltage on the large-amplitude vibration response of the DEB were investigated. For this purpose, an initial stretch of 2.5 was used and the results of the parametric analysis are presented in Figures 11 to 13. In the absence of applied electric voltage, the DEB material experiences softening and becomes less stiff as the static internal pressure increases. This results to a lower frequency of vibration (Figure 11(a)) and a lower maximum kinetic energy (Figure 11(a)). In the case of a constant applied voltage (Figure 12), the same behaviour was observed regarding the influence of internal pressure on the large-amplitude vibration response, except that the observed behaviour is more pronounced. Similarly, increasing the applied voltage in the absence of internal pressure leads to more softening effects in the large-amplitude vibration response, whereas the introduction of a constant pressure makes the softening effects more obvious (Figure 13).

Influence of static pressure on the large-amplitude (
Influence of static pressure on the large-amplitude (

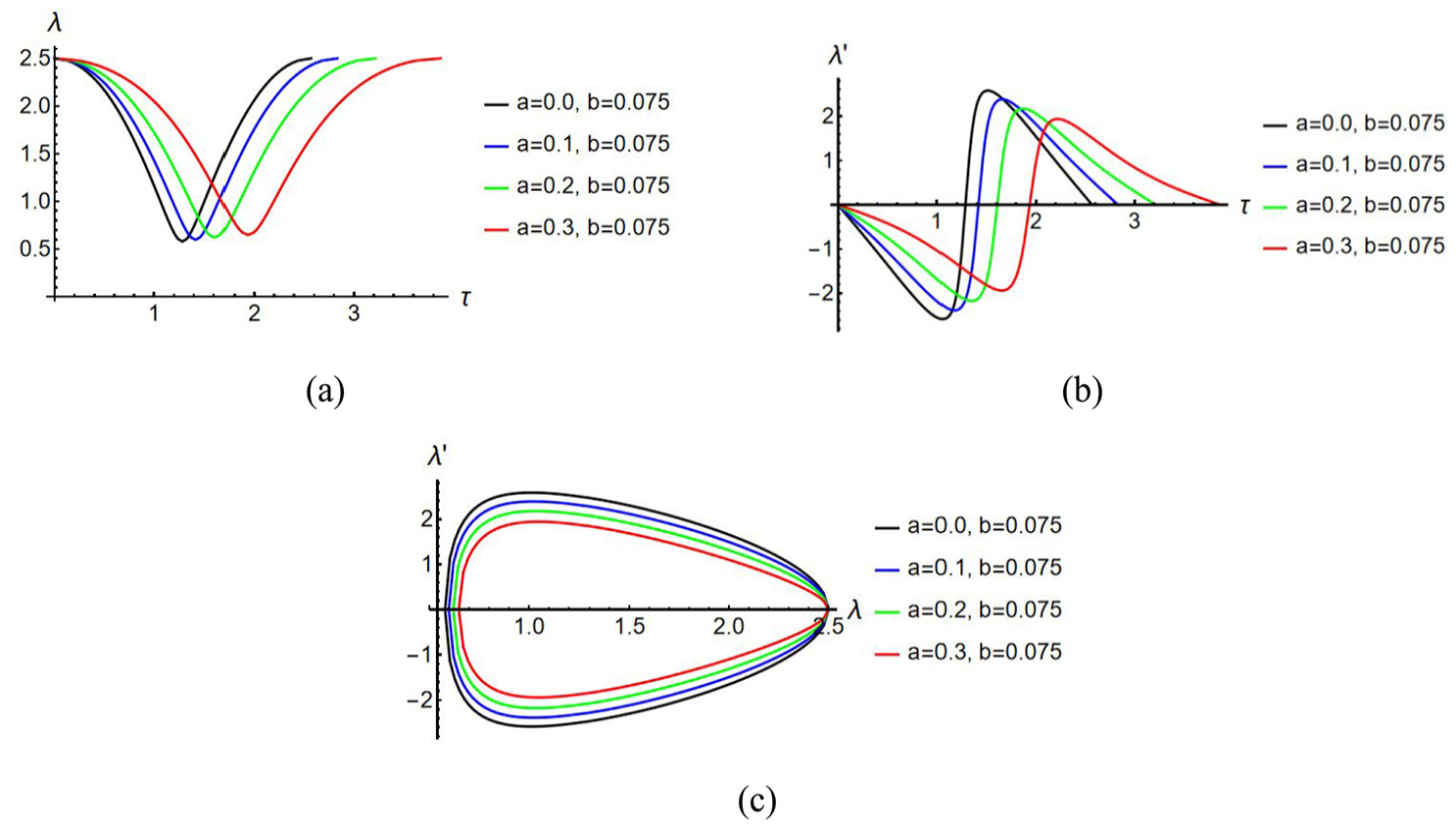
Influence of applied electric voltage on the large-amplitude (
Furthermore, it was observed that increasing the pressure and voltage reduces the range of values of the initial stretch that permits stable vibrations. This is because the limiting stretch shifts towards the centre of vibration as the pressure and voltage increases. For instance, if
Conclusions
The study applied the continuous piecewise linearization method to examine the large-amplitude vibration of a dielectric elastomer balloon made up of neo-Hookean material. The vibration model of the DEB is highly nonlinear and is characterized by a negative index nonlinearity. Consequently, most approximate analytical methods are either unable to solve the neo-Hookean DEB vibration model directly or they produce approximate solutions that are only accurate for small- to moderate-amplitude vibrations. However, the CPLM can solve vibration models with complex nonlinearity and it was applied to handle the negative index nonlinearity. The CPLM solution that was derived for the neo-Hookean DEB vibration model produced very accurate results that are several orders more accurate than the corresponding NHB results for small- to large-amplitude vibrations. Therefore, the CPLM is recommended for the vibration analysis of other DEB models, for example, models accounting for strain-stiffening effect during large-amplitude vibrations.
A qualitative treatment of the neo-Hookean DEB model was conducted and the stability analysis showed that the stable vibrations of the neo-Hookean DEB are all uni-centric. Also, the DEB experiences a saddle node bifurcation that results in transition from stable vibrations to instability and vice versa. An analysis of the strength of nonlinearity of the DEB showed that the DEB exhibits strong nonlinear vibration for most of the initial stretch that produces stable vibrations. The nonlinearity becomes stronger as the initial stretch approaches the limiting stretch thereby producing a more asymmetric vibration response. The asymmetry in the vibration response can be defined in terms of the ratio of the deviation of the initial stretch from the centre of vibration to the difference between both amplitudes. This asymmetric ratio ranges from 0.5 to 1.0. A value of 0.5 represents a symmetric response while a value greater than 0.5 represents an asymmetric response. The closer the ratio is to 1.0, the more asymmetric the response and the stronger the nonlinearity.
The neo-Hookean DEB vibration model has two critical parameters which are the applied electric voltage and the static internal pressure. Investigations to examine the effects of these two parameters on the vibration response of the DEB revealed that an increase in either or both of these parameters reduces the effective stiffness of the DEB thereby producing a lower frequency response with lower maximum kinetic energy. In addition, the limiting initial stretch moves closer to the centre of vibration as either of the two parameters are increased. This results to a more restricted range of initial stretch values that can yield stable vibrations. Hence, the two parameters can be used as control parameters for the design of stable large-amplitude vibrations of the neo-Hookean DEB.
This study provides a methodological framework that can be used to conduct future studies to accurately investigate the stable dynamic response of DEB vibrations. Additionally, more accurate non-polynomial hyperelastic models incorporating strain-stiffening effects and non-local constitutive behaviour can be applied to conduct vibration analysis using the CPLM.
Footnotes
Appendix
The pseudocode algorithm in this appendix is for the first half of the vibration cycle (i.e., from
Acknowledgements
None.
Handling Editor: Sharmili Pandian
Author contributions
Dr. A. Big-Alabo: Conceptualization, supervision, methodology, results, writing and proof-reading. Mr. C. F. Abah: Methodology, results, writing and proof-reading. Prof. T. A. Briggs: Supervision, writing and proof-reading
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.