
Abstract
This article explores the impact of 3D printing technology on prototyping low-cost robotic arm prosthetic. The research begins with a thorough analysis of the robotic arms currently available on the market, with the aim of identifying their characteristics, costs, and limitations. Based on this review, an in-house design is developed using simplified CAD software, tailored to optimize both functionality and production efficiency. The construction of the prototype is carried out using 3D printing, taking advantage of the capabilities of this technology to reduce costs and manufacturing times compared to traditional methods. The article details the design and printing process, highlighting key decisions made to maximize the economic viability of the project. Finally, a detailed analysis of the costs associated with the project is carried out, comparing the results obtained with the initial reference data. This analysis allows us to evaluate the effectiveness of 3D printing as a low-cost solution in the development of robotic prostheses, highlighting its economic benefits and potential areas for improvement. The findings suggest that 3D printing represents a promising alternative for the creation of accessible robotic prosthetic, with significant implications for cost reduction and democratization of access to new technologies.
Introduction
3D printing has emerged as a transformative technology in the manufacturing of medical devices, particularly robotic arm prostheses. Traditionally, prosthetic devices have been prohibitively expensive and limited in customization due to conventional manufacturing methods such as molding and machining, which involve complex and costly processes. 1 These limitations have left many individuals, especially in low-income regions, without access to functional prostheses tailored to their specific needs.
In contrast, 3D printing offers a cost-effective and adaptable alternative, facilitating broader access to these technologies. This innovative technique allows for the creation of personalized and precise designs that are adjusted to the exact measurements of the user, thereby significantly enhancing the comfort and functionality of prosthetic devices. 2 Moreover, the capability to rapidly iterate designs and produce prototypes within hours, rather than weeks, fosters continuous innovation in the field of robotic prosthetics. For instance, studies indicate that the adoption of 3D printing can reduce manufacturing costs by up to 60%, enabling manufacturers to offer more affordable solutions. 3
This article examines the impact of 3D printing, specifically employing Fused Deposition Modeling (FDM) with Polylactic Acid (PLA), on the production of robotic arm prostheses, highlighting both its advantages and challenges. FDM technology is among the most accessible and widely utilized 3D printing techniques, owing to its low cost and the availability of materials such as PLA, a biodegradable thermoplastic derived from renewable resources like corn and sugarcane. 4 PLA is noted for its ease of printing and sufficient strength for medical applications, making it an ideal choice for prosthetic fabrication. 5
The advantages of 3D printing in prosthetic manufacturing include a substantial reduction in costs, expedited production times, and the ability to create intricate designs that would be unfeasible or extremely difficult to produce using traditional methods. 6 A recent study emphasizes that customizing prostheses via 3D printing not only enhances the quality of life for amputees but also contributes to a decrease in the rejection rates of these devices. 7
However, the integration of 3D printing into prosthesis manufacturing presents several challenges. The durability and mechanical strength of 3D-printed prostheses require further improvement to meet the standards necessary for daily and continuous use. 8 A systematic review of 3D-printed transtibial prostheses indicates that, despite notable advancements in material strength, uncertainties remain regarding the long-term durability of these prosthetic devices in comparison to traditional options. 9
Furthermore, the incorporation of electronic and mechanical components into 3D-printed prostheses necessitates meticulous planning and precision to ensure optimal performance. 10 Despite these challenges, additive manufacturing holds significant potential to revolutionize prosthetic healthcare by enhancing access to more personalized and functional devices.
This article not only explores the advancements and benefits of 3D printing in the manufacturing of robotic arm prostheses but also addresses current obstacles and limitations, providing a comprehensive overview of the present state and future potential of this technology within the domain of medical prosthetics.
Methodology
To assess the impact of 3D printing technology on the construction of low-cost robotic arm prostheses, a systematic review was conducted following a rigorous and well-defined methodology. The central research question was formulated as follows: “What is the impact of 3D printing, specifically utilizing fused deposition modeling (FDM) technology and polylactic acid (PLA), on the fabrication of low-cost robotic arm prostheses?”
Specific criteria were established for the selection of studies, which included those addressing the fabrication of robotic prostheses using FDM and PLA, published within the last 10 years, with a focus on cost, materials, and functional characteristics. Articles that did not concentrate on 3D printing or that employed alternative technologies, as well as studies lacking relevant quantitative or qualitative data, were excluded from this review.
The search for relevant literature was conducted across academic databases, including PubMed, IEEE Xplore, Scopus, and Google Scholar, utilizing keywords such as “3D printing,”“robotic prostheses,”“FDM,” and “PLA.” Filters for date and document type were applied to optimize the search, ensuring the inclusion of recent and pertinent studies.
Each identified study was evaluated according to the predefined criteria. A standardized evaluation sheet was employed to record essential information, including the methodology, results, and conclusions of each article. This systematic approach ensured the quality and relevance of the data incorporated into the review.
The collected data were analyzed to identify patterns and trends in the application of 3D printing for the fabrication of robotic prostheses. Particular emphasis was placed on the economic and technical advantages of employing FDM and PLA, such as their relatively low cost, ease of modeling, and reduced production times compared to traditional manufacturing methods.
The results of the review are presented in Table 1, which offers a detailed comparison of currently available robotic arm prostheses. This table encompasses information on cost, materials, and functional characteristics of each prosthesis, thereby highlighting the feasibility of 3D printing as a cost-effective alternative to conventional prosthetic solutions.
Commercial prosthesis price list.

Finally, recent innovations and advancements in 3D printing technology that influence the fabrication of robotic prostheses are discussed. The efficacy and viability of 3D printed solutions are evaluated, considering aspects such as customization, fit, and adaptability to the individual needs of users. Furthermore, the findings obtained are compared with existing literature to contextualize this research within the current landscape of low-cost robotic prosthesis development.
Following the systematic review, the next step involves comparing the economic results obtained from the reviewed studies with the collected information. This comparative analysis aims to evaluate the cost-effectiveness of 3D printing technology in the context of low-cost robotic arm prostheses.
The economic data collected from each study, including production costs, material expenses, and any additional financial considerations, will be systematically analyzed. This analysis will involve aggregating and contrasting these findings to identify trends, patterns, and potential discrepancies among the various studies.
By synthesizing this economic information, we aim to draw informed conclusions regarding the viability and financial advantages of utilizing 3D printing technologies – specifically FDM and PLA – in the fabrication of robotic prostheses. This analytical process will provide a comprehensive understanding of how 3D printing can potentially reduce costs and enhance accessibility for individuals in need of prosthetic solutions.
Ultimately, the conclusions drawn from this analysis will contribute to a broader understanding of the role that 3D printing technology can play in the development of affordable and effective robotic arm prostheses, positioning this research within the ongoing discourse on innovative manufacturing solutions in healthcare.
To practically evaluate the viability of the proposed solution, an internally developed prototype of the robotic arm was created, optimized for functionality and efficiency using an FDM 3D printer and PLA material. The design was refined to achieve practical results; however, it is important to clarify that it remains a prototype and is not intended for commercialization in the short term. The information provided in this article will focus solely on the essential details necessary for a comprehensive cost analysis, omitting any extraneous aspects that are not relevant to the economic evaluation. This approach ensures a clear focus on the financial implications of 3D printing technology in the manufacturing of low-cost robotic arm prosthetics.
Construction
The design and construction of a robotic prosthetic arm using FDM 3D printing technology follows a methodical and multi-stage process, encompassing phases from initial conceptualization and design to fabrication and final assembly. This structured methodology ensures that each component of the prosthesis is meticulously planned and executed to achieve a functional device that meets the specific requirements of the user. A detailed description of each stage in this process is provided below, ensuring a comprehensive understanding of the design and development workflow.
Conceptualization and initial design
The first stage in the construction of a robotic prosthetic arm is conceptualization and design. During this phase, the specific requirements of the user are identified, including the anatomy of the arm, the desired range of motion, and the specific functionalities that the prosthesis must provide. Using computer-aided design (CAD) software, a detailed digital model of the prosthesis is created. This model must take into account both aesthetics and functionality, ensuring that it is ergonomic and capable of performing the necessary movements. Accuracy at this stage is crucial, as any design error can affect the final performance of the prosthesis.
Prosthesis design and optimization
The selection of design parameters for a hand prosthesis is critical to ensuring its optimal performance and functionality as shows in Table 2. Key parameters, along with their impact on the overall performance of the prosthesis, are outlined in detail below to provide a comprehensive understanding of their importance in the design process.
Design parameters for hand prostheses.
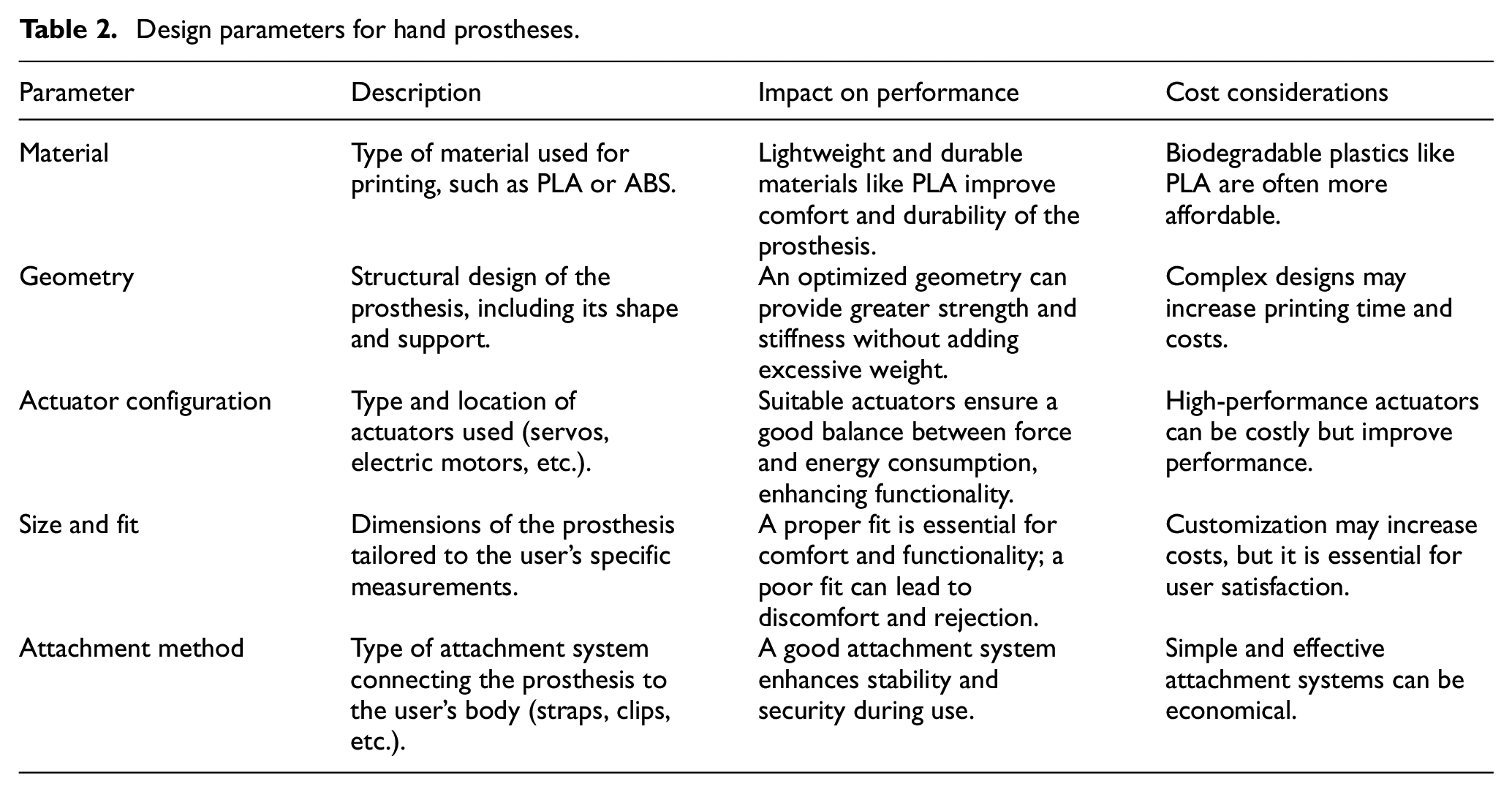
The selection of materials, such as PLA, not only reduces manufacturing costs, but also improves comfort for the user by minimizing the overall weight of the prosthesis. For example, the use of PLA can reduce the production cost of a prosthesis by 50%–60%, allowing its affordability for people in low-income regions.
The geometry should be optimized to provide maximum structural strength while maintaining a simplified design that facilitates 3D printing. Biomimetic designs, which mimic the structure of the human hand, have been shown to be effective in improving the functionality and range of motion of prostheses. 20
In addition, the selection of suitable actuators, which offer a good balance between force and power consumption, is critical to ensure sufficient performance without significantly increasing costs. For example, the incorporation of small but powerful servomotors can achieve efficient movement in the prosthetic hand, ensuring that it can perform everyday tasks without requiring high energy consumption. 21
By considering these parameters and their interactions, a low-cost prosthesis can be developed that meets functional and quality expectations, thus enabling its accessibility for a larger number of users. This comprehensive approach not only improves the functionality of the prosthesis, but also has the potential to increase the quality of life of amputees by providing devices that are tailored to their specific needs.
The selection of the PLA was made after analyzing several considerations which can be summarized in Table 3.
Comparison of 3D printing materials for FDM technology.

Table 4 shows, the approximate size of a hand according to different groups of people.
Approximate size of a hand for a group of people.

Technical specifications
The movements and functions that the prosthesis must perform should be clearly defined, including actions such as hand opening and closing, wrist rotation, and elbow flexion. Ensuring precise movement in these areas is crucial for the functionality of the prosthesis, allowing it to replicate natural motion as closely as possible. Proper design considerations must be made to guarantee that the range of motion and control meet the user’s needs, providing both functionality and comfort. As shows the Figure 1.
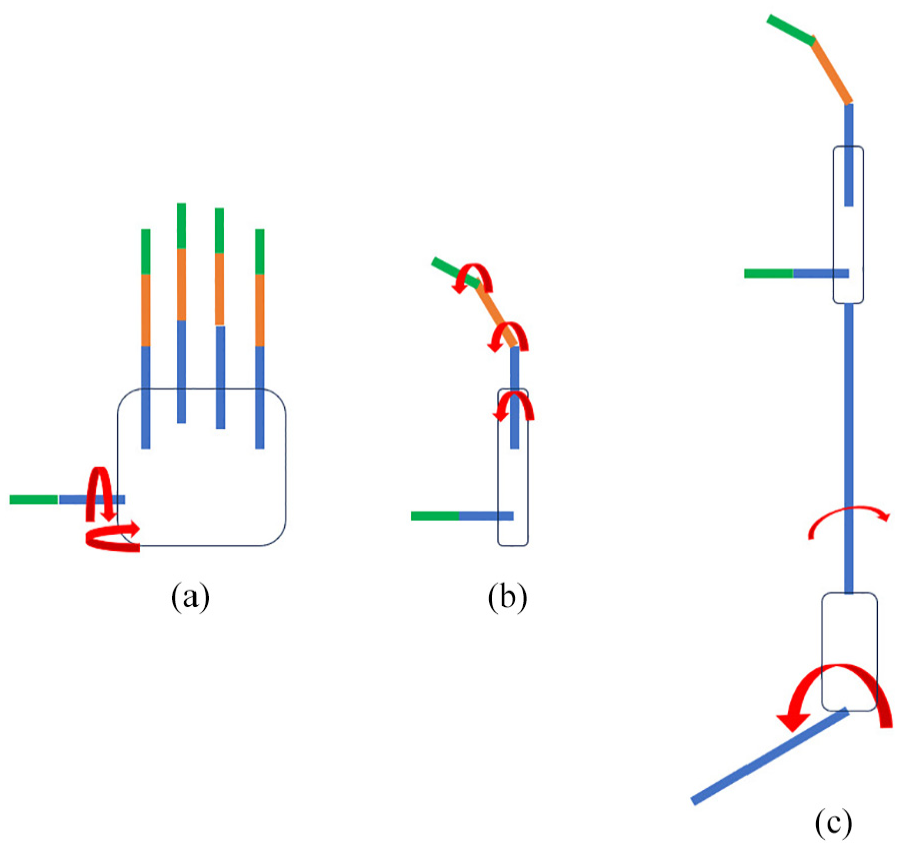
Hand movement diagram, Figure 1 shows the basic movements of the fingers of the hand: (a) front view of the hand, (b) side view of the hand, and (c) shows the movements for the full arm considered for the design of the prototype.
CAD design
Computer-aided design (CAD) software, specifically Fusion360, was utilized to develop the 3D model of the prosthesis. The design incorporated essential details such as joint articulations, compartments for motors and electronic components, and designated assembly points. Additionally, simulations were conducted to validate the functionality and movement of each part, ensuring that the prosthesis would operate as intended before the fabrication process. The complete design of the robotic arm, along with its modeled components, is illustrated in Figure 2, and the list of parts are explained in Table 5.

Robotic arm modeled in Fusion 360. The designed arm has a total of 33 parts to be manufactured with the 3D printer.
Components for robotic arm.

Preparing for 3D printing
To initiate the 3D printing process, each component must first be prepared individually using appropriate slicing software, as shows the Figure 3. This involves converting the CAD model, originally created in formats such as .obj or .stl, into a format compatible with the 3D printer. Software like CURA is employed to convert the STL files into G-code, which contains the specific instructions for the printer. It is essential to carefully configure various printing parameters, including resolution, layer height, infill density, and the use of supports, to optimize the quality and structural integrity of each printed part. One of the advantages of using such slicing software is that it provides detailed estimations of both material usage and printing costs, which are essential for planning and budgeting.

The figure shows the process of preparing the slicer CURA for the 3D printing process. The software only shows the price for the material used.
Once the CAD design is finalized and sliced, the next stage involves the preparation and configuration of the FDM 3D printer. Precise calibration of the printer is crucial, including adjustments to the extruder temperature, print speed, and bed temperature. These parameters must be carefully fine-tuned to ensure optimal adhesion between layers and the overall dimensional accuracy of the printed parts.
The design of the robotic prosthesis was specifically engineered to avoid the need for segmenting any component into smaller parts for printing. This approach ensures that each part is printed as a whole, reducing assembly complexity and post-processing requirements. By maintaining this integrated design, the overall strength and functionality of the prosthesis are enhanced while minimizing potential assembly errors.
3D printing process
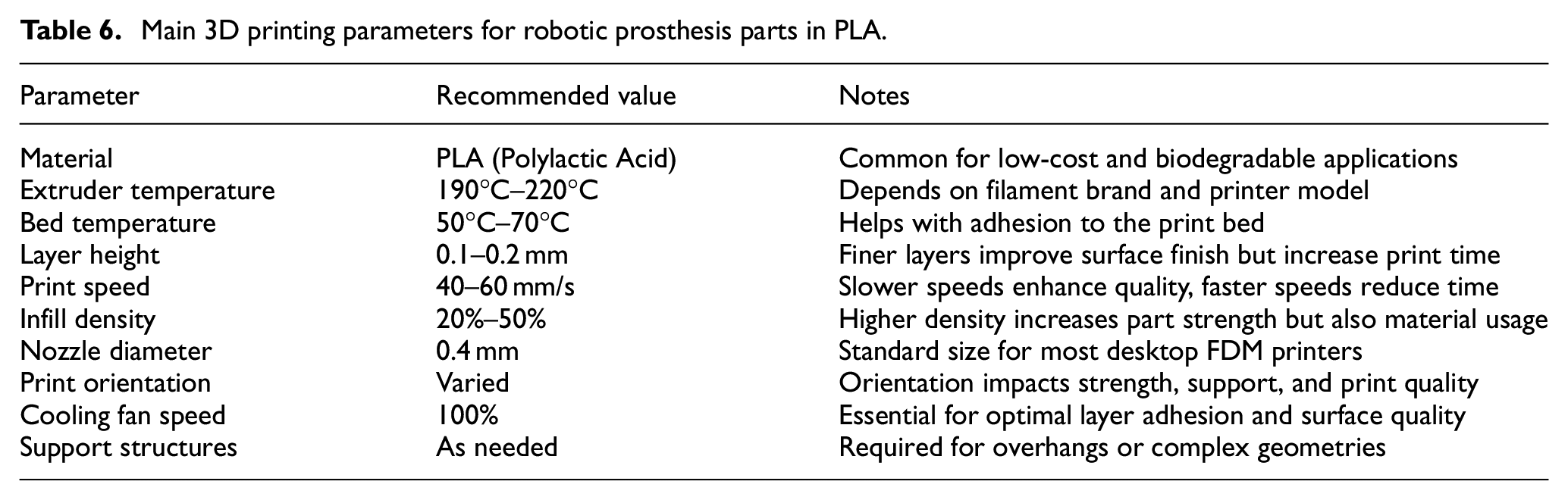
The calibration of the FDM 3D printer is a critical step to ensure the precision and quality of the printed parts. The process begins by leveling the print bed to ensure uniform layer adhesion across the entire surface. It is equally important to verify that the extruder is clean and functioning optimally to prevent clogging or defects during printing. The extruder and bed temperatures must be set according to the material specifications, with typical values for PLA ranging from 190°C to 220°C for the extruder and 50°C to 60°C for the print bed, depending on the manufacturer’s guidelines. For the printing of the prosthetic components, an Artillery X2 printer was employed, operating at a print speed of 50 mm/s. This speed can be significantly increased with more advanced printers, allowing for a considerable reduction in the overall printing time of each part, and consequently, the entire model.
Further details regarding the specific printing parameters, including layer height, infill density, and support configurations, are outlined in Table 6 for a more comprehensive understanding of the setup.
Main 3D printing parameters for robotic prosthesis parts in PLA.
Assembly
To assemble the 3D-printed components, adherence to the original design specifications is essential to ensure precise fitting and unrestricted movement of all joints. Each component’s alignment must be meticulously verified to achieve an accurate and functional assembly. The assembly employs screws for securing the parts, which is preferred over adhesive methods to facilitate ease of disassembly. This design choice allows for the straightforward replacement of any damaged or worn components, thereby enhancing maintenance efficiency. The utilization of screws is particularly advantageous for components requiring robust fixation, taking into consideration both durability and the ease of maintenance in the selection of the assembly technique.
Upon completion of the mechanical assembly, integration of motors, sensors, and other requisite electronic components is undertaken to enable the prosthesis’s functionality. Motors provide actuation for the various articulating segments, while sensors are implemented for detecting user input and environmental signals. All electronic components are connected to a control board or microcontroller (Arduino Uno), responsible for managing the prosthesis’s movements and operational responses. It is imperative that the arrangement of these electronic components is organized and secure to prevent electrical interference and ensure optimal system performance.
The final phase entails the development of control algorithms to govern the motors and sensors, ensuring the prosthesis accurately responds to user commands. The programming is conducted within a suitable development environment, such as the Arduino Integrated Development Environment (IDE). Comprehensive testing is performed to verify the functionality of all operational modes, ensuring that the prosthesis executes the desired movements smoothly and with precision. During this testing phase, any hardware or software discrepancies must be identified and rectified, necessitating adjustments to both parameters and code as required. This concluding step is crucial to ensure that the prosthesis is not only functional and reliable but also tailored to meet the specific needs of the user.
Economic impact assessment
Following the construction of the robotic arm, it is essential to evaluate the economic impact of employing a low-cost 3D printer in conjunction with a simplified design. This assessment focuses on several key factors, including the arm’s functionality, the quality of the printed components, the durability of the materials, and overall user satisfaction. Additionally, considerations such as total production time, the technical expertise required for assembly, the ease of customization, and the ability to make rapid adjustments are thoroughly analyzed. This evaluation aims to offer a comprehensive understanding of how 3D printing can significantly lower the cost of manufacturing robotic prosthetics, providing accessible and efficient solutions. The analysis, however, is limited to the economic aspects of the process. 24
Cost reduction
One of the primary advantages of 3D printing in the production of prostheses is the substantial cost reduction. Materials commonly used in 3D printing, such as polylactic acid (PLA), are significantly more affordable than traditional materials like metals and high-strength polymers typically employed in commercial prosthetics. Furthermore, 3D printing enables the production of components in small quantities without the need for costly molds or specialized tooling, enhancing efficiency and conserving resources. Fused Deposition Modeling (FDM) technology allows the fabrication of complex parts with acceptable precision, minimizing material waste and reducing manufacturing time, further lowering overall costs. This economic accessibility positions 3D printing as a viable solution for creating personalized and affordable prostheses.25–27 The cost of the 3D printing process varies by company; for this project, standardization was applied using CURA slicer, which provided values for the cost per hour of printing and the amount of material consumed.
The cost of the 3D printing process is independently determined by each company, often leading to significant price variations. For this project, a standardized approach was adopted based on the cost per hour of printing and the quantity of material used, both values provided by the CURA slicing software. This software enables precise calculation of total printing costs by considering factors such as print duration, infill density, layer height, and material consumption. For instance, the cost of PLA is calculated based on the weight of the material required to produce each component of the prosthesis. This standardization facilitates cost comparisons and allows for effective economic planning, ensuring that resources are allocated efficiently. Furthermore, it enables adjustments to design and print settings to optimize costs without compromising the quality or functionality of the prosthesis.28,29
In order to determine the cost of each piece, a detailed calculation was performed, considering factors such as material consumption, print time, and operational costs. This process is outlined in equation (1), which provides a comprehensive breakdown of the steps involved in calculating the total cost, including the cost of material per unit weight, the duration of the print, and the cost per hour of machine operation

Where:
•
•
•
•
•
•
•
Calculation of Material Grams: The column “Material Grams” is calculated using the formula:

This can be simplified to:

For example, for the “Proximal phalanx”:

Table 7 summarizes the total expenditure associated with the 3D printing of the mechanical components for this project, which amounts to $57.24 USD. The total printing duration was derived by aggregating the values presented in the “hours” column and converting the total minutes to hours; specifically, 412 min corresponds to 7 h and 52 min. Furthermore, Table 7 provides a comprehensive breakdown of the parameters for each printed component, detailing aspects such as print duration, material consumption, and associated costs. This level of detail facilitates a thorough assessment of the time and resources allocated to each individual component, enhancing the overall understanding of the project’s economic and operational efficiency.

List of parts manufactured with 3D printing.

In addition, the electronic components, as detailed in Table 8, must also be included in the overall cost analysis.
List of electronic components.

The total cost of the arm is determined by adding the mechanical components with the electronic components, resulting in the following result.

Where:
•
•
•

The total cost of the prosthesis amounted to $197.69 USD, reflecting an efficient combination of 3D printing for the mechanical components and the integration of electronic elements. This final cost highlights the economic feasibility of using low-cost additive manufacturing technologies to develop customized and accessible solutions without compromising the functionality or quality of the device. It demonstrates that affordable prostheses can be produced by employing advanced methodologies that optimize both material resources and production time. Figure 4 shows a comparison of the produced prosthesis with respect to the cost of commercial prostheses.

Comparative table of costs of the prototype built with commercial arms. From the graph you can see the enormous decrease in costs, a result evidently possible due to the economy of its manufacturing process and the selection of the simplest electronic components, of course the performance is not the best however it is a factor that can be improved with slight modifications to the CAD design.
Customization and adaptability
3D printing enables the creation of highly customized prostheses, precisely tailored to the unique needs of each patient. This level of personalization not only enhances the comfort and functionality of the prosthetic devices but also promotes greater user acceptance and prolonged use, as the prostheses are aligned with individual preferences and requirements. The ability to design precise digital models from 3D scans of the residual limb ensures an optimal fit, mitigating issues such as discomfort and improper fitting. 30 However, for the purposes of this research, the prosthesis model was constructed using a generalized design to standardize a simplified and replicable manufacturing process. This approach was chosen to streamline production and reduce costs, foregoing advanced customization options that, while potentially offering additional benefits, would introduce complexity and increase the final cost. As a result, the generalized model serves the objectives of this study, though it limits the prosthesis’ ability to fully adapt to the specific needs of individual patients.31,32
Innovation in design
Design flexibility is another major advantage of 3D printing, enabling designers and engineers to explore and experiment with complex, lightweight structures that would be nearly impossible to produce using traditional manufacturing methods. This capacity for innovation in intricate geometries has driven significant advancements in prosthetic functionality, allowing the integration of more efficient and adaptive mechanisms that enhance performance and user comfort. 32 Moreover, 3D printing enables the creation of components with customized features and fine details that optimize device usage and interaction. In contrast, the design for the present project has been intentionally simplified to reduce print time and minimize the number of components required. This decision prioritizes manufacturing efficiency and ease of assembly over aesthetic considerations, intentionally sacrificing ornamental elements to achieve greater simplicity and functionality. While this may limit the visual appeal of the final product, the streamlined approach ensures faster and more cost-effective production, making it highly accessible for a wide range of applications.
Challenges and limitations
Despite its numerous advantages, the application of 3D printing in prosthetic construction presents several significant challenges. A primary concern is the durability and mechanical strength of printed materials, which often fall short compared to traditional materials utilized in prosthetic manufacturing. Factors such as filament type, print configuration, and environmental conditions can adversely impact the mechanical properties of 3D-printed components, potentially compromising the functionality and longevity of the prosthesis. In contrast, traditional prosthetic fabrication typically employs robust materials, such as carbon fiber and metal alloys, which offer superior durability and mechanical strength. However, these materials often come with increased costs and longer production times.
Additionally, the integration of electronic components and actuators into 3D-printed prosthetics remains a crucial area requiring further research and development. The incorporation of these elements poses technical challenges, such as ensuring proper alignment, achieving seamless integration, and providing adequate protection for sensitive electronic components. Traditional methods may better facilitate these integrations due to established practices and a deeper understanding of material interactions, yet they lack the adaptability and customization potential inherent in 3D printing.
In the context of the current project, the decision was made to utilize Polylactic Acid (PLA), one of the most cost-effective and widely accessible materials in 3D printing. While PLA is not the strongest option available and is not ideal for applications demanding high durability, its properties make it a favorable choice for constructing an economical prosthetic arm. This choice prioritizes cost reduction and accessibility over the mechanical strength of the material. Although this decision introduces certain limitations regarding durability and resistance, it enables the production of prostheses at significantly lower costs, thereby enhancing accessibility to this technology for a broader demographic, particularly in regions with constrained financial resources.
In summary, while 3D printing in prosthetic construction faces challenges related to material properties and the integration of electronic components, it presents a transformative alternative to traditional manufacturing methods. The ability to create customized, cost-effective solutions through 3D printing holds the potential to improve the quality of life for many individuals, particularly in underserved communities.
Results
The prototype of the robotic arm prosthesis was meticulously designed and constructed utilizing Fused Deposition Modeling (FDM) 3D printing technology with Polylactic Acid (PLA) filament. PLA is widely recognized for its accessibility and user-friendly characteristics in the realm of additive manufacturing, making it an ideal choice for this project. The design process commenced with an in-depth analysis of the user’s specific functional and ergonomic requirements. This comprehensive assessment encompassed various factors, including mobility, comfort, and adaptability, ensuring that the prototype effectively met both technical and personal specifications.
The findings from this analysis facilitated the development of an optimized model, which was strategically divided into multiple discrete components. This modular approach not only addressed the print size limitations inherent in typical 3D printers but also streamlined the assembly process, promoting ease of construction. Each component was designed with careful consideration of its role within the overall functionality of the prosthesis, ensuring that individual parts could be printed efficiently without compromising structural integrity.
To achieve high dimensional accuracy and enable precise modifications, the design was executed using advanced Computer-Aided Design (CAD) software. This technology allowed for the creation of intricate geometries and provided the capability to simulate movements and assemblies prior to physical printing. Such simulations were instrumental in validating that all parts fit together seamlessly and adhered to established design standards. Furthermore, the iterative nature of CAD software enabled virtual testing and optimization of the design, which significantly enhanced the performance and minimized the potential for errors during the manufacturing phase.
As a result of these comprehensive design and engineering efforts, a functional prototype was successfully produced that not only meets the requisite technical specifications but also offers a practical and efficient solution for the assembly and utilization of the robotic prosthesis (Figure 5). The prototype demonstrates the feasibility of using 3D printing technology to create customized prosthetic solutions tailored to individual user needs, thereby advancing the field of prosthetics and enhancing the quality of life for individuals requiring such assistive devices. Future research and development will focus on further refining the design and exploring the integration of more advanced materials and electronic components to enhance the functionality and durability of the prosthetic arm.

Figure 5 shows the different parts of the robotic arm: (a) shows the mechanism that allows the elbow to rotate, (b) shows the servomotors in the forearm, each servo controls a finger, and (c) shows the hand assembled with a small servo for finger movement.
The functionality of the prosthetic arm was rigorously evaluated through a comprehensive series of tests aimed at verifying its performance under realistic conditions of use. These evaluations encompassed several key aspects, including joint mobility, responsiveness to user commands, and the durability of the 3D-printed components. Each test was meticulously designed to assess how the joints operated across various ranges of motion, ensuring they could be tailored to meet the specific needs of the user in everyday scenarios.
One of the critical evaluations involved analyzing the prosthesis’s responsiveness to user commands. This included measuring the accuracy and speed with which the integrated motors and sensors reacted to control signals. The electronic components were subjected to rigorous testing protocols to ensure they facilitated smooth and responsive control, thereby enabling effective interaction with the prosthetic device. Special attention was paid to the integration of motors and sensors, with monitoring procedures in place to confirm their flawless operation and ability to make real-time adjustments based on the user’s input.
The outcomes of these tests demonstrated that the 3D-printed prosthesis, constructed from PLA, exhibits commendable mobility and precision in movement, despite the material’s inherent limitations. The joints exhibited an adequate range of motion, coupled with a swift and accurate response to user commands. Furthermore, the performance of the integrated motors and sensors was found to be optimal, facilitating seamless and responsive control during operation.
In terms of durability, the printed components were subjected to extensive evaluation, which indicated that while PLA is not the most robust material available, the design and construction of the prototype successfully maintained satisfactory performance throughout the testing phases. The innovative design choices implemented in this project mitigated some of the material’s limitations, allowing for effective functionality under typical usage conditions.
Overall, the prosthetic arm proved to be both functional and efficient, successfully meeting the project objectives despite the challenges associated with the selected printing material, Figure 6. The findings highlight the potential of using 3D printing technology in the development of prosthetic devices, demonstrating its ability to create customized solutions that can adapt to individual user requirements. Future work will focus on further optimizing the design and exploring alternative materials and technologies to enhance the overall performance and durability of the prosthesis.
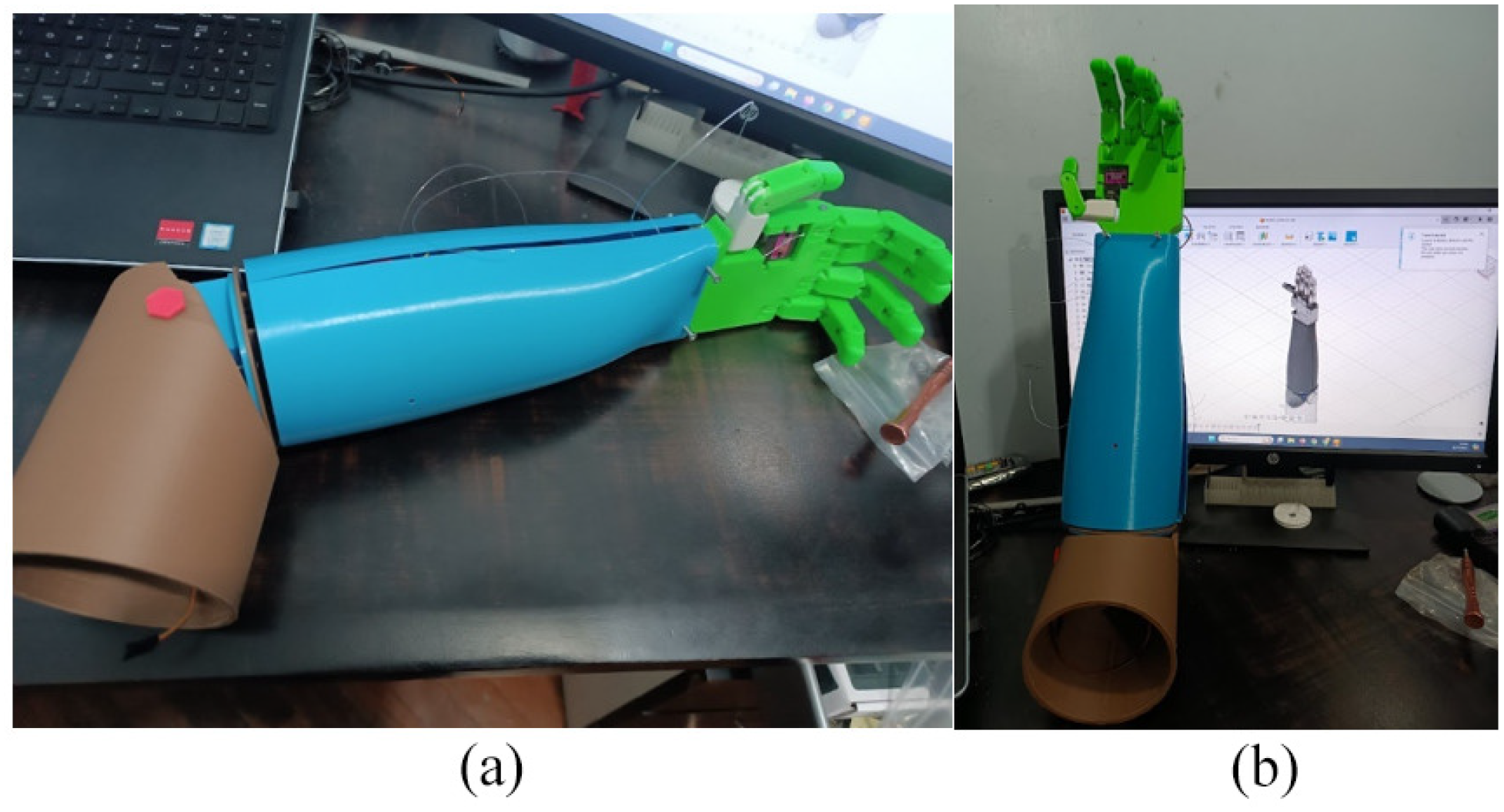
Figure 6 shows the fully assembled robotic arm with complete cover: (a) Shows the fully assembled robotic prosthesis, (b) Shows a comparison of the CAD design with the final result obtained after manufacturing the prosthesis.
Discussion
A comprehensive analysis was conducted to assess how the use of 3D printing technologies influences the cost of prosthetic, contrasting the prices of 3D printed prostheses with those of traditional prostheses manufactured using conventional methods. This analysis is detailed below using statistical data that allows for a clear and accurate comparison.
To illustrate this impact, a table was produced that compares the maximum costs of various commercial robotic arm prostheses with an original low-cost project developed using 3D printing. The table includes pricing data for different business models, which cover a wide range of costs due to factors such as design complexity, materials used, and additional features. The original low-cost project, made using 3D printing technology, was included in the comparison to assess its cost competitiveness.
A statistical analysis of these data is presented below, including the cost distribution of commercial prostheses and the position of the original project in this context. The analysis highlights the variability of prices between different commercial options, allowing for a detailed assessment of the costs associated with traditional prostheses compared to 3D printed ones. Factors such as the unit cost of production, the impact of the 3D printing material, and additional costs related to design and assembly are examined.
The analysis also highlights how the original low-cost project stacks up in relation to commercial options in terms of price, as show Table 9, demonstrating that 3D printing can offer an economically viable alternative. The statistical results underscore the ability of 3D printing to significantly reduce manufacturing costs, making prostheses more accessible to a greater number of users. This cost-effective approach, combined with the flexibility and customization offered by 3D printing, presents an attractive option in the robotic prosthetic market.
Summary of cost data.

Media

The average cost of commercial prosthetic is approximately $41,900 USD, which is significantly higher than the cost of the original project, which is only $198 USD. This highlights the cost efficiency of the original project.
Standard deviation

The standard deviation of approximately USD 41,800 indicates a high variability in prosthetic costs. This suggests that there is a wide range of prices on the market, from very inexpensive models like the Handiii (USD 500) to very expensive models like the LUKE Arm and the i-Limb Quantum (both USD 100,000). Analysis of the data demonstrates that using FDM 3D printing technology with PLA can dramatically reduce the manufacturing costs of robotic arm prostheses. The original project, costing USD 198, offers an extremely economical alternative to commercial options, which vary significantly in price. The high variability of costs and the large difference between the mean and the original project suggest that there is great potential for the adoption of 3D printing technologies in the prosthetic industry, making these devices more accessible to a greater number of people.
Linear regression model
We aim to model the relationship between the number of printed parts

Where:
•
•
•
•
•
Steps in the calculation
Input data: From the table of 3D-printed prosthetic parts, the independent variable
Mean calculation: Calculate the means of the variables

Slope

This represents the change in cost for each additional part printed.
Intercept

This is the fixed cost, independent of the number of parts printed.
Regression equation: Once the slope and intercept are determined, the regression equation is formed:

This equation estimates the cost based on the number of parts printed.
Prediction and residuals: For each observation, we calculate the predicted values

Residuals indicate how far the actual costs deviate from the predicted costs.
R-squared calculation: The coefficient of determination

This value indicates the proportion of the variance in the cost that is explained by the number of printed parts.
By performing the linear regression analysis, we can quantify how the number of printed parts influences the overall cost of manufacturing prosthetics using 3D printing. The model helps in optimizing production and making cost-efficient decisions in future projects.
Regression analysis results
The linear regression analysis shows that the model has an R-squared of 0.758, indicating that approximately 75.8% of the variation in the manufacturing costs of the printed parts can be explained by the selected independent variables (quantity of parts, material grams, and total printing time in minutes).
Interpretation of the coefficients
Quantity of parts (quantity): The coefficient is 0.7144, suggesting that for each additional printed part, the cost increases by approximately 0.71 USD. However, this value is not statistically significant at the 5% level (p-value of 0.091).
Material grams: The coefficient is 0.0544, meaning that for each additional gram of material, the cost increases by 0.054 USD. This coefficient is statistically significant (p-value of 0.007).
Total time (minutes): The coefficient is 0.0188, indicating that for each additional minute of printing time, the cost increases by 0.018 USD. However, the p-value of 0.092 suggests that this factor is marginally significant.
The amount of material used is a significant factor that has a strong impact on the costs. The number of parts and the printing time also contribute to the overall cost, but their statistical significance is lower. These results provide a solid basis for evaluating the efficiency of 3D printing in terms of both cost and time, highlighting the importance of optimizing material usage.
Correlation analysis: Costs versus printing time
A correlation analysis was conducted to examine the relationship between the cost of 3D-printed parts and the total printing time. The Pearson correlation coefficient
Pearson correlation coefficient
The Pearson correlation coefficient between Costs and Total Printing Time is:

Interpretation of results
The Pearson correlation coefficient of
Strength of correlation: A correlation value between 0.5 and 0.7 is generally considered a moderate correlation. In this case, the moderate positive correlation implies that while the printing time does influence the cost, other factors (such as material used) also contribute significantly to the cost.
Statistical significance: Assuming a p-value lower than 0.05, the correlation is statistically significant, meaning there is evidence of a relationship between printing time and costs.
The correlation analysis reveals that there is a moderate positive relationship between the total time spent on 3D printing and the cost of producing parts. This indicates that optimizing printing time could help reduce costs, but other factors, such as material consumption, also play a key role in the overall cost structure.
ANOVA analysis results
An analysis of variance (ANOVA), Table 10 was conducted to evaluate the significance of the independent variables (Quantity, Material Grams, and Total Time) on the overall manufacturing costs. The results are as follows:
ANOVA table for manufacturing costs.

Interpretation of the ANOVA results
Quantity: The F-statistic for the quantity of printed parts is 3.15. With a p-value greater than 0.05, this suggests that the quantity is not statistically significant at the 5% level, although it does have some influence on the cost.
Material grams: The F-statistic is 6.24, with a p-value lower than 0.05, indicating that the amount of material used is a statistically significant factor in determining the cost of the printed parts.
Total time (minutes): The F-statistic is 1.57, showing that the printing time is not statistically significant at the 5% level.
Based on the ANOVA results, the amount of material (in grams) is the only statistically significant factor affecting the cost of 3D-printed parts. The quantity of parts and total printing time also contribute to the cost, but their influence is not statistically significant. This suggests that optimizing material usage is key to improving cost efficiency in 3D printing for prosthesis manufacturing.
Sensitivity analysis: Key parameters
The sensitivity analysis was performed to assess how variations in key parameters – such as the quantity of pieces, the amount of material used (in grams), and the total printing time (in minutes) – affect the total cost of producing prosthetic parts using 3D printing.
Key parameters and their impact on cost
The following parameters were evaluated for their sensitivity:
Quantity of pieces: Increasing the number of pieces printed impacts the total cost due to material consumption and printing time.
Material (grams): The amount of material used directly influences the cost since the cost is proportional to the weight of the material in grams.
Total printing time (minutes): The longer the printing time, the higher the cost due to factors like energy consumption and machine usage.
Sensitivity calculation
To evaluate the percentage change in total cost when increasing or decreasing each parameter by 10%, keeping the other parameters constant, as shows in Table 11. The following formula was used to calculate the sensitivity:

Sensitivity analysis results.
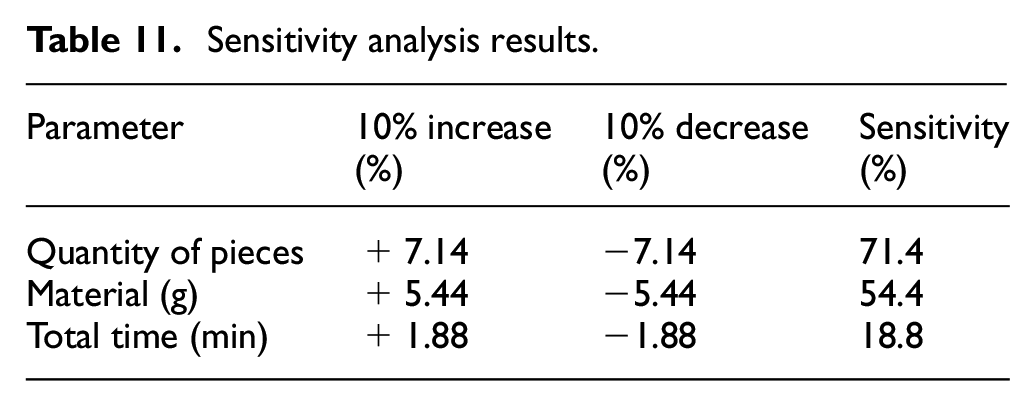
Interpretation of sensitivity results
Quantity of pieces: A 10% increase in the quantity of pieces leads to a 7.14% increase in cost, indicating a moderate sensitivity. This shows that the number of pieces printed has a notable impact on the overall cost.
Material (grams): A 10% increase in material used results in a 5.44% increase in total cost. The sensitivity analysis highlights that material consumption plays a significant role in cost variation.
Total printing time: A 10% increase in printing time leads to only a 1.88% increase in cost. The sensitivity of printing time to cost is lower compared to the other parameters, indicating that time has a lesser impact on overall cost.
The sensitivity analysis shows that the total cost is most sensitive to changes in the quantity of pieces and material used. While total printing time does affect costs, its influence is less significant. Thus, optimizing the number of printed pieces and minimizing material usage are critical factors in reducing the cost of 3D-printed prosthetics.
Conclusions
3D printing technology has demonstrated a significant impact on the development of low-cost robotic arm prosthetics. Its advantages in terms of cost reduction, customization, and innovative design position it as an essential tool in the creation of accessible medical devices. However, ongoing research is crucial to address current challenges and fully harness the potential of this technology.
The primary material utilized for printing the components was PLA (Polylactic Acid), chosen for its biodegradable properties, ease of use, and adequate mechanical strength for medical applications. The total cost of the material used for the prosthesis was notably low compared to traditional prosthetic fabrication methods. At $198, the total project cost is substantially below both the median ($8000) and average prices for prosthetics. This underscores the viability of low-cost 3D printing technologies for manufacturing affordable prosthetic devices. The disparity between the highest ($100,000 USD) and lowest ($198 USD) costs amounts to $99,802 USD, highlighting the significant variability in the pricing of available prosthetics.
Prostheses constructed using 3D printing, particularly those produced with FDM technology and PLA, exhibit a markedly lower cost compared to conventional prosthetic solutions. This indicates a positive effect on accessibility and personalization, enabling a larger number of users to benefit from these advanced technologies.
FDM 3D printing technology, especially with materials such as PLA, provides an accessible and economical pathway for constructing robotic arm prostheses. By following a meticulous process from initial design to final fitting, it is feasible to create functional and customized prosthetics that significantly enhance the quality of life for users.
Additionally, it is recommended that future research includes an evaluation of the performance of PLA-printed components under stress testing, specifically concerning wear resistance, flexibility, and load capacity. If the prosthesis has not undergone any mechanical testing, such as cyclic fatigue tests or simulated real-world usage scenarios, it is advisable to conduct such assessments. The absence of these evaluations should be considered a limitation of the current study, as this technical analysis is vital for determining the long-term viability of the prosthetic design.
This article contributes to the existing body of knowledge by providing a comprehensive analysis of the economic advantages of utilizing 3D printing technology in the manufacturing of robotic arm prosthetics. By showcasing the significant cost reductions achieved through the use of PLA, this study emphasizes the viability of 3D printing as a low-cost alternative to traditional prosthetic fabrication methods, ultimately enhancing accessibility for individuals in need of such devices. Furthermore, this research underscores the potential for high levels of customization inherent in 3D printing processes, allowing for the creation of prosthetics tailored to the specific anatomical and functional requirements of each user. This capability not only improves user satisfaction but also increases the effectiveness of prosthetic solutions in real-world applications. Collectively, these contributions highlight the transformative potential of 3D printing technology in the field of prosthetics, advocating for further exploration and development to optimize both functionality and affordability.
Based on the statistical analyses conducted, several key conclusions can be drawn regarding the factors influencing the manufacturing costs of the 3D-printed robotic prosthetic arm. The linear regression analysis revealed that material usage (grams) is the most significant factor, with a strong positive correlation to cost, while the number of pieces and total printing time, though contributing, showed lower statistical significance. The ANOVA results further support this, indicating that material usage accounts for the largest variance in manufacturing costs. The sensitivity analysis demonstrated that small variations in the quantity of material used result in the most substantial cost fluctuations, highlighting the need for careful optimization of material usage in the design and printing process. In conclusion, reducing material consumption would have the greatest impact on lowering costs, while managing time and quantity remains important but less critical from a financial standpoint.
In the context of current literature, this study distinguishes itself by proposing a modular and cost-effective approach to developing 3D-printed robotic prostheses, emphasizing accessibility and cost-efficiency. Unlike previous studies that extensively explore the use of 3D printing in prosthetics, our approach offers a practical advantage through a modular design that allows for the replacement of specific components without the need to manufacture an entirely new prosthesis in cases of wear or damage. This approach not only reduces initial costs but also minimizes maintenance expenses and extends the prosthesis’s lifespan, positioning it as a viable and sustainable alternative in low-resource settings.
Footnotes
Acknowledgements
The authors would like to express their gratitude to Universitario Rumiñahui for their generous support and sponsorship of this research. Their contributions have been invaluable in facilitating the study and analysis presented in this paper. The financial and logistical support provided by Universitario Rumiñahui has been crucial in enabling the use of Fusion 360 software for the design and modeling of the 3D-printed robotic arm, as well as providing the necessary resources for the 3D printing process. This support has been essential for advancing the development of low-cost prosthetic solutions.
Handling Editor: Divyam Semwal
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) declared having received the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Instituto Tecnológico Superior Rumiñahui as part of the research department.