
Abstract
Intelligent prosthetic hands typically require an increase in the number of acquisition channels to improve gesture recognition accuracy, resulting in increased device complexity and cost. However, there are individual differences in muscle strength, body mass index, and exercise habits. Electromyographic prosthetic hands currently use standardized electromyographic channel configurations, which lack adaptability to individual differences. To address these issues, this paper proposes the electrode configuration adaptive optimization algorithm, which enhances and integrates traditional genetic algorithms and simulated annealing algorithms, and implements adaptive optimization solutions for different subjects. Experimental results show that the optimization outcomes differ among different subjects. Compared to a single optimization algorithm, the proposed algorithm can adaptively optimize the electrode configuration based on individual differences while ensuring recognition effectiveness, retaining electrode channel information that significantly contributes to gesture classification recognition, and meeting the stable recognition of their motion intentions by different subjects.
Keywords
Introduction
Surface electromyography (sEMG) is the most commonly used control source for the current prosthetic hand. The methods for electrode configuration in sEMG signal acquisition include high-density layout, low-density layout, 1 and muscle targeted layout. Staudenmann et al. 2 used high-density electromyography (HD-EMG) grids to assess the relative importance of various electrode sensor configurations in optimizing muscle strength estimation. Compared to a single conventional bipolar electrode pair, the quality of force estimation improved by about 30% when using HD-EMG. Huang et al. 3 employed a novel spatio-spectral filter, common spatio-spectral pattern (CSSP), to enhance the classification accuracy in identifying intended motions based on low-density surface electromyography. Significant improvements were observed in the classification accuracy among all healthy subjects, indicating its potential use in functional prosthetic control. Fang et al. 4 conducted experimental verification on the advantages of the muscle-matched electrode configuration (MEC) method. It was evaluated on 11 subjects with 11-gesture recognition and compared with two traditional channel selection methods, that is, uniform configuration (UNI) and sequential forward searching (SFS) configuration. The experimental results demonstrated the superiority of MEC in operational effectiveness by reducing the number of gestures oriented toward optimization and the number of trials oriented toward optimization and training.
High-density layout 5 provides high-resolution data on muscle activity, which can capture the potential distribution inside the muscles. However, the equipment and analysis process are relatively complex and costly, making them unsuitable for fast measurement applications.6,7 Moreover, when the number of electrodes is increased to a certain extent, the obtained information tends to saturate, and the contribution to improving the gesture recognition accuracy is relatively small 8 ; Low-density layout 9 is suitable for daily physiological monitoring and rehabilitation training, with high flexibility, but limited data resolution and detail level; Muscle targeted layout 10 can accurately capture the activity of target muscles or specific muscle groups, minimize interference, and is suitable for fine motor analysis, but may not provide a comprehensive understanding of overall muscle coordination and movement. 11 Therefore, each of the three electrode configuration methods has its own limitations, and there are data errors caused by a lack of consideration for individual differences. It is necessary to optimize the number and position of electromyographic electrodes based on individual differences in order to achieve a balance between the processing volume of sEMG data and the accuracy of gesture recognition.
Young et al. 12 investigated the effect of electrode displacement on gesture recognition and sought the optimal electrode spacing for electromyographic pattern recognition to minimize the impact of electrode displacement. The study by Huang et al. 13 on the configuration of electromyographic electrodes for targeted muscle nerve reinnervation demonstrated that using 12 selected bipolar electrodes enables achieving motion intention recognition with minimal accuracy decrease. Paleari et al. 14 evaluated electrode configuration and 11 gesture movements in 200 participants, concluding that the best recognition effect was achieved with two rows of eight equally spaced circular configurations, achieving an accuracy rate of 92% and obviating the need for complex hardware design. Besomi et al. 15 analyzed the advantages and disadvantages of four electrode types and recommended the most suitable electrode type for specific muscles. Pelaez Murciego et al.’s study demonstrated that wrist position in the matrix electrode can reduce the number of channels without compromising performance, 16 with the selected electrode being highly specific to the subject. Lieshout et al. analyzed the electromyographic signals of the lower orbicularis oris muscle induced by perilabial gestures, 17 studied the relationship between electromyography levels and muscle activity duration, and sought the most discriminative electromyography measurement method.
The optimization of electromyographic electrode configuration can mitigate interference from electrode displacement and noise,18,19 consequently enhancing signal stability. Given the variability in muscle structure and daily activity patterns among individuals, optimized configurations may differ across users.20,21 Nevertheless, conventional intelligent prosthetic hands predominantly employ the standardized electrode configuration, leaving ample research opportunities to address individual differences in body structure.
Soft computing is a computational paradigm that relies on heuristic and nature-inspired approaches, focusing on tackling complex problems that are difficult to solve using traditional methods. Soft computing strategies offer a powerful set of tools for tackling complex problems. By leveraging heuristic and nature-inspired approaches, they can handle uncertainty and vagueness, leading to more flexible and error-tolerant solutions. As technology progresses, soft computing strategies are expected to play an increasingly vital role in diverse fields. Pan et al. 22 proposed a knowledge-based two-population optimization (KTPO) algorithm that integrates factory assignment and machine assignment into an extended machine assignment to handle the coupled relations of subproblems, thereby solving the distributed energy-efficient parallel machines scheduling problem (DEPMSP). Zhao et al. 23 proposed a hyper heuristic with Q-learning (HHQL) to solve the distributed blocking flow shop scheduling problem (DBFSP), and demonstrated the efficiency and significance of HHQL in solving EEDBFSP. Zhao et al. 24 solved the distributed no-idle permutation flow shop scheduling problem (DNIPFSP) by introducing an improved iterative greedy (IIG) algorithm. The variable neighborhood descent (VND) algorithm is applied to the local search method of the iterative greedy algorithm, and the Q-learning mechanism for selecting the weighting coefficients is introduced to obtain a relatively small objective value. Deng et al. 25 designed a novel improved differential evolution (DE) algorithm with the wavelet basis function called WMSDE to address the limitations of DE algorithm. This algorithm can improve the search quality, accelerate convergence and avoid fall into local optimum and stagnation.
This paper proposes an electrode configuration adaptive optimization algorithm, aiming to achieve customized optimization of the position and quantity of electromyographic electrodes in intelligent prosthetic hands. This algorithm integrates and enhances the underlying principles of traditional genetic algorithms and simulated annealing algorithms, thus improving the algorithm’s ability to search both globally and locally. The genetic algorithm 26 offers a versatile framework for solving optimization problems in complex systems, introducing a novel global optimization search algorithm independent of specific problem domains. Meanwhile, the simulated annealing algorithm 27 can probabilistically escape local optima in the search space, enabling a more thorough exploration. The two algorithms exhibit good complementarity, while their internal genetic evolution strategies have been improved. The introduction of the dynamic population mechanism and the adaptive crossover probability mechanism enhances the search performance and efficiency of the algorithms. Experimental results demonstrate that the enhanced and integrated electrode configuration adaptive optimization algorithm can determine the optimal number and spatial distribution of sEMG acquisition channels for different subjects, effectively reducing signal acquisition costs while maintaining gesture recognition accuracy.
Intelligent prosthetic hand system
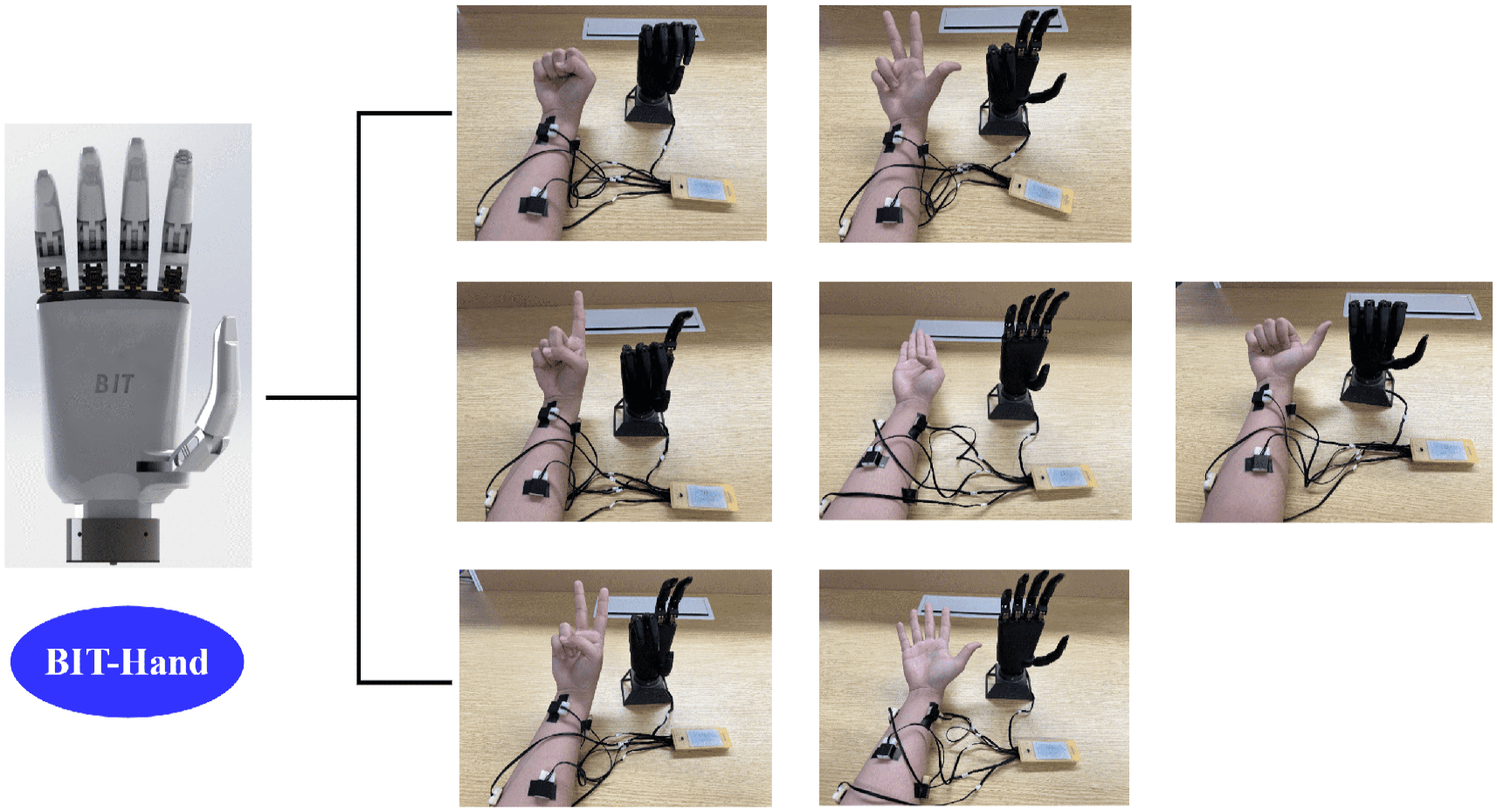
The electrode configuration adaptive optimization algorithm proposed in this paper operates on the system platform of the intelligent prosthetic hand BIT-Hand, as shown in Figure 1. BIT-Hand is built upon the linkage-driven prosthetic hand design, wherein each finger possesses two degrees of freedom, individually actuated by dedicated motors. The thumb features the passive rotational degree of freedom alongside an active bending degree of freedom. All driving and electrical components are housed within the palm, facilitating precise control over finger articulation. This design boasts high integration and a sleek aesthetic, enabling a wide range of gestures and movements to be executed with agility.

Intelligent prosthetic hand BIT-Hand: (a) the overall structure of the prosthetic hand and (b) typical gestures of prosthetic hands.
The overall weight of the intelligent prosthetic hand BIT-Hand is 323 g (including electromyographic electrodes, excluding batteries, receiver chambers, and silicone gloves), which is within the design reference range. Its total length measures 180 mm, with the width of 80 mm. The hand exhibits the maximum grip strength of 120 N, with the four fingers capable of rotating within the range of 0°–120°. Additionally, the thumb possesses the palm-to-palm movement range of 0°–110°. Each finger demonstrates the self-locking capability exceeding 60 N, while the wrist can passively rotate full 360°.
The electromyographic control method employed by the intelligent prosthetic hand utilizes the pattern recognition-based classification algorithm, and the flowchart is shown in Figure 2. The electromyographic electrode collects the sEMG of the human arm as training data to train the classification model. Data segmentation is then performed to meet the real-time demands of prosthetic hand control. Subsequently, feature extraction is conducted, wherein time-frequency domain features are extracted from each data segment, replacing the original signal with statistical features. Following the completion of training, the control chip utilizes data segmentation and feature extraction to transmit the data to the pre-trained classifier, which outputs the corresponding action mode, thereby enabling control over various movements of the prosthetic hand.

sEMG control algorithm diagram.
Limitations of traditional metaheuristic algorithms
The genetic algorithm is an optimization technique that mimics natural selection and genetic processes, emulating the genetic and evolutionary dynamics found in nature. 28 It operates by iteratively optimizing a population of potential solutions, aiming to find the optimal solution to the given problem. Within the genetic algorithm framework, the population represents a range of possible solutions, with new solutions generated through processes akin to gene crossover and mutation observed in nature. The fitness function is employed to assess the performance of each solution, and during each iteration, the survival-of-the-fittest mechanism is enacted between parents and offspring generated within the population. In the context of channel optimization for processing sEMG, the advantages of genetic algorithms are evident: (1) Suitability for handling large-scale and complex optimization problems like sEMG channel optimization, capable of exploring a wide solution space to identify the optimal solution. (2) Characterized by parallel processing capabilities and high search efficiency, facilitating swift exploration of potential solutions.
The limitations of the single genetic algorithm are mainly reflected in: (1) sEMG channel optimization problems may require a large and complex amount of computation, which may lead to poor optimization efficiency of the algorithm. (2) Particularly in scenarios of heightened complexity or the presence of multiple local optima, genetic algorithms are susceptible to converging on suboptimal solutions.
The simulated annealing algorithm 29 is an optimization technique inspired by the physical annealing process observed in solid materials. It emulates the heating and gradual cooling of materials, wherein atoms ultimately settle into a stable state with the lowest energy, representing the optimal solution for the system. The advantages of the simulated annealing algorithm include: (1) By accepting suboptimal solutions with a certain probability, the algorithm avoids becoming trapped in local optima. (2) The implementation of the algorithm is relatively straightforward, and it demonstrates high computational efficiency.
However, the single simulated annealing algorithm may struggle to ensure the attainment of the global optimal solution, particularly when tackling large-scale and intricate problems. The effectiveness of simulated annealing algorithms heavily relies on the configuration of key parameters, such as initial temperature, cooling rate, and stopping conditions. Inappropriate parameter choices can result in premature convergence to local optima or slow convergence rates, necessitating extensive experimentation and adjustment to optimize performance.
Adaptive optimization design of electrode configuration
Metaheuristic algorithms are highly adaptable for optimizing sEMG channels. These algorithms mimic natural or physical processes and search for the best solution within the solution space. Addressing the optimization challenge of electromyographic channels in intelligent prosthetic hands, this paper proposes an electrode configuration adaptive optimization algorithm. It refines and integrates the core principles of genetic algorithms and simulated annealing algorithms. After fine-tuning parameters and extensive testing, the algorithm demonstrates enhanced performance in optimizing channel configurations.
Adaptive electrode configuration strategy for individual differences
The optimization process of the electrode configuration adaptive optimization algorithm comprises two phases: global search and local search. The overall process is shown in Figure 3.

Flow chart of electrode configuration adaptive optimization algorithm.
Global search phase
The global search phase primarily harnesses the global search capability of the genetic algorithm, utilizing the BP neural network as the fitness function. It assesses both parent and offspring individuals in each iteration based on this function, retaining optimal individuals and treating each one as a potential solution. During the iteration process of the algorithm, the adaptive crossover probability mechanism and dynamic population mechanism will make the crossover probability and population parameters no longer fixed. Upon the emergence of the more ideal solution during the certain iteration, signaling convergence initiation, the population size is halved, expediting the global search process. Following the iterations, a set of filtered optimal solutions is directed into the local search phase for further optimization.
Local search phase
The local search phase primarily leverages the local search capability of the simulated annealing algorithm. In each iteration, it explores the neighborhood of the current solution through multi-point mutation and employs the Metropolis criterion to decide whether to accept the new solution, introducing the probability for escaping local optima. As the number of iterations increases, the temperature gradually decreases, reducing the tolerance for accepting new solutions. The final optimization result is outputted at the conclusion of the loop.
Electrode configuration adaptive optimization algorithm
As evidenced by the preceding discussion, genetic algorithms, and simulated annealing, two traditional metaheuristic optimization approaches, possess distinct advantages and limitations. Their underlying principles also reveal the natural complementarity. The electrode configuration adaptive optimization algorithm proposed in this study will leverage the strengths of both genetic algorithms and simulated annealing while enhancing their internal mechanisms to address their respective limitations.
Dynamic population mechanism
In evolutionary algorithms, populations play a crucial role in facilitating the exchange of information and progressing through genetic operations among individuals, aiming to ascertain the optimal solution to the given problem. Members of a population collectively engage in a sequence of evolutionary processes, iteratively refining their fitness and navigating toward superior solutions within the solution space.
In traditional genetic algorithms, population values remain constant throughout iterations. The population size significantly influences algorithm performance: excessive sizes consume extensive computing resources and exhibit limited local search capabilities, while insufficient sizes may compromise optimization efficacy. This paper introduces the dynamic population size mechanism, initiating with the size of 20. Upon convergence of gesture recognition accuracy to 95% of the full channel accuracy, the population size will be halved to 10, enhancing subsequent iteration search efficiency. The pseudocode is shown in Table 1.
Dynamic population pseudocode.

Through dynamic population size adjustments, the algorithm can adapt its search strategy based on problem complexity, enhancing adaptability across various optimization scenarios. This mechanism achieves a harmonious equilibrium between global and local search throughout different optimization phases, consequently enhancing algorithmic adaptability and performance.
Adaptive cross probability mechanism
Genetic evolution strategies primarily involve mutation and crossover operations. The crossover operation entails the exchange of genetic information between two parent individuals to produce new offspring. This process emulates biological hybridization, amalgamating genetic information from two individuals to yield offspring with novel feature combinations.
In conventional genetic algorithms, the crossover probability typically remains a fixed constant, yet the problem’s characteristics may evolve throughout the search process. During periods of low population fitness or inadequate diversity, augmenting the crossover probability facilitates increased information transmission, fostering broader exploration of the search space. Conversely, when fitness levels are high or the population becomes overly concentrated, diminishing the crossover probability preserves favorable information, directing the algorithm toward localized search areas. This paper introduces an adaptive crossover probability mechanism, dynamically adjusting the crossover probability in response to the distribution of population fitness, thereby enhancing algorithmic exploration performance.
The adaptive crossover probability mechanism dynamically adjusts the crossover probability during each population iteration based on the current average fitness level. Firstly, we define the normalization function and the dynamic adjustment function for fitness as follows:


Where f is the current fitness value, and F is the fitness set of the current population, α, β, and γ are adjustment parameters, which are set to 0.5, 0.2, and 0.1 respectively in this paper. Considering population diversity, the fitness variance




Where
Multipoint mutation mechanism
The electrode configuration adaptive optimization algorithm predominantly employs the simulated annealing algorithm for subsequent optimization tasks in the local search phase. Acknowledging the limitations of traditional single-point mutation in exploring the search space, this paper proposes the multi-point mutation mechanism based on neighborhood structure. Unlike single-point mutation where a single locus in a variable is selected for mutation, multi-point mutation involves mutating multiple locations simultaneously, allowing for concurrent modification of multiple loci in an individual’s gene sequence. This mutation mechanism can effectively explore the solution space, particularly in scenarios with extensive solution spaces or complex problems, thereby enhancing the likelihood of genetic algorithms discovering global optimal solutions.
In each iteration, three variable sites are selected for mutation, with the mutation locations being randomly determined. Subsequently, the value of the corresponding site undergoes mutation, whereby 1 becomes 0 and 0 becomes 1. As shown in Figure 4, the variation sites of the parental chromosomes are 3, 7, and 9, with respective values of [1,1,0]. Consequently, the corresponding site values of the mutated offspring chromosomes are [0,0,1]. During the process, the configuration of the electromyographic electrodes was changed from “accept sEMG from channels 3 and 7, reject sEMG from channel 9” to “accept sEMG from channel 9, reject sEMG from channels 3 and 7.” Multi-point mutation, serving as a more adaptable search strategy, accelerates the local search process and augments search diversity.

Multipoint variation.
Experiment and analysis
Data set
This experiment utilized two datasets: the publicly accessible NinaPro sub-dataset DB1, comprising signals from 52 hand movements, and the electromyographic database obtained during the sEMG collection experiment, encompassing signals from seven hand movements.
NinaPro public dataset
The Ninapro (Non-Invasive Adaptive Prosthetics) dataset, publicly available in Switzerland, 30 stands out as one of the most comprehensive datasets in the domain of sEMG research. This metadatabase comprises surface electromyographic signals, joint kinematics, and other relevant information sourced from both healthy and unhealthy subjects. The sensors employed for data collection in the Ninapro dataset encompass electromyography sensors, data gloves, force sensors, inclinometers, and three-axis accelerometers. Detailed parameters of the dataset are presented in Table 2. Within the dataset’s repertoire of 52 gestures, there are 12 basic finger movements, 8 basic hand movements, 9 basic wrist movements, and 23 grasping and functional movements. Fifteen subjects were randomly selected from among all 27 subjects in the NinaProDB1 dataset for the experimental study described in this paper.
Ninapro DB1 dataset parameters.

SEMG experimental collection dataset
The experiment utilized the OpenSignals (r) evolution data collection platform, as shown in Figure 5. Its primary functionalities encompass acquiring sensing signals from multi-channel devices, visualizing and recording data, and loading pre-recorded signals. OpenSignals features a suite of data analysis components capable of directly scrutinizing data and extracting pertinent features. The sEMG collection experiment encompassed 10 subjects in total. To accommodate individual discrepancies, the collected data for each subject underwent further differentiation, considering factors such as body mass index, handedness, and work type (physical or mental labor). Detailed information is shown in Table 3. Body Mass Index (BMI) is a commonly used indicator to assess an individual’s level of adiposity and overall health status. Moreover, the thresholds for categorizing overweight, normal weight, and underweight are universally recognized as international standards.

sEMG collection process: (a) OpenSignals revolution collection platform, (b) collect electrodes, (c) the subject’s forearm was pasted with a collection electrode and electromyographic data was collected, and (d) raw sEMG data.
SEMG collects experimental subject information.

The data collection process, shown in Figure 5, involved all subjects selecting their handedness for sEMG collection experiments, employing traditional Ag/AgCl electrodes. Based on the distribution of muscle groups in the human forearm, eight muscle groups with notable strength were targeted. These included the extensor carpi ulnaris, extensor carpi radialis longus, flexor carpi radialis, extensor digitorum communis, extensor pollicis longus, extensor pollicis brevis, flexor digitorum superficialis, and flexor digitorum profundus, aligning with channels 1–8 of the sEMG apparatus utilized in the experiment. Throughout the experiment, subjects executed seven predetermined gestures as per the outlined requirements, with each gesture repeated 30 times.
Individual differences and lateral comparisons between algorithms
The comparative experiment was conducted utilizing electrode configuration adaptive optimization algorithm, ant colony algorithm, and greedy algorithm, employing the NinaProDB1 dataset. The optimized number of channels serves as the primary comparison metric, with the algorithm yielding the fewest channels in the final optimization result among the three algorithms deemed to possess superior performance. In the experiment, four feature values were extracted from the collected data: root mean square (RMS), integrated electromyographic (IEMG), mean power frequency (MPF), and median frequency (MF). These four feature values reflect different aspects of the electromyographic signal, jointly providing a more comprehensive description of muscle activity and exhibiting a certain degree of robustness against noise. The gesture recognition accuracy is obtained by a backpropagation (BP) neural network. Due to the powerful nonlinear mapping capability of the BP neural network, it can effectively learn the gesture features and thus achieve high recognition accuracy. Calculate the gesture recognition accuracy for each subject across all 10 channels of data in the NinaProDB1 dataset. The screening criteria for optimizing channels are as follows:
The minimum accuracy threshold for channel optimization is set at 95% of the gesture recognition accuracy of the full channel. This means that the accuracy reduction after optimization cannot exceed 5%. (2) During each iteration of the algorithm, to prevent a sharp decrease in gesture recognition accuracy, the current result should show the decrease in accuracy of no more than 5% compared to the previous iteration. This implies that the tolerance for the decrease in gesture recognition accuracy for each iteration is 5%.
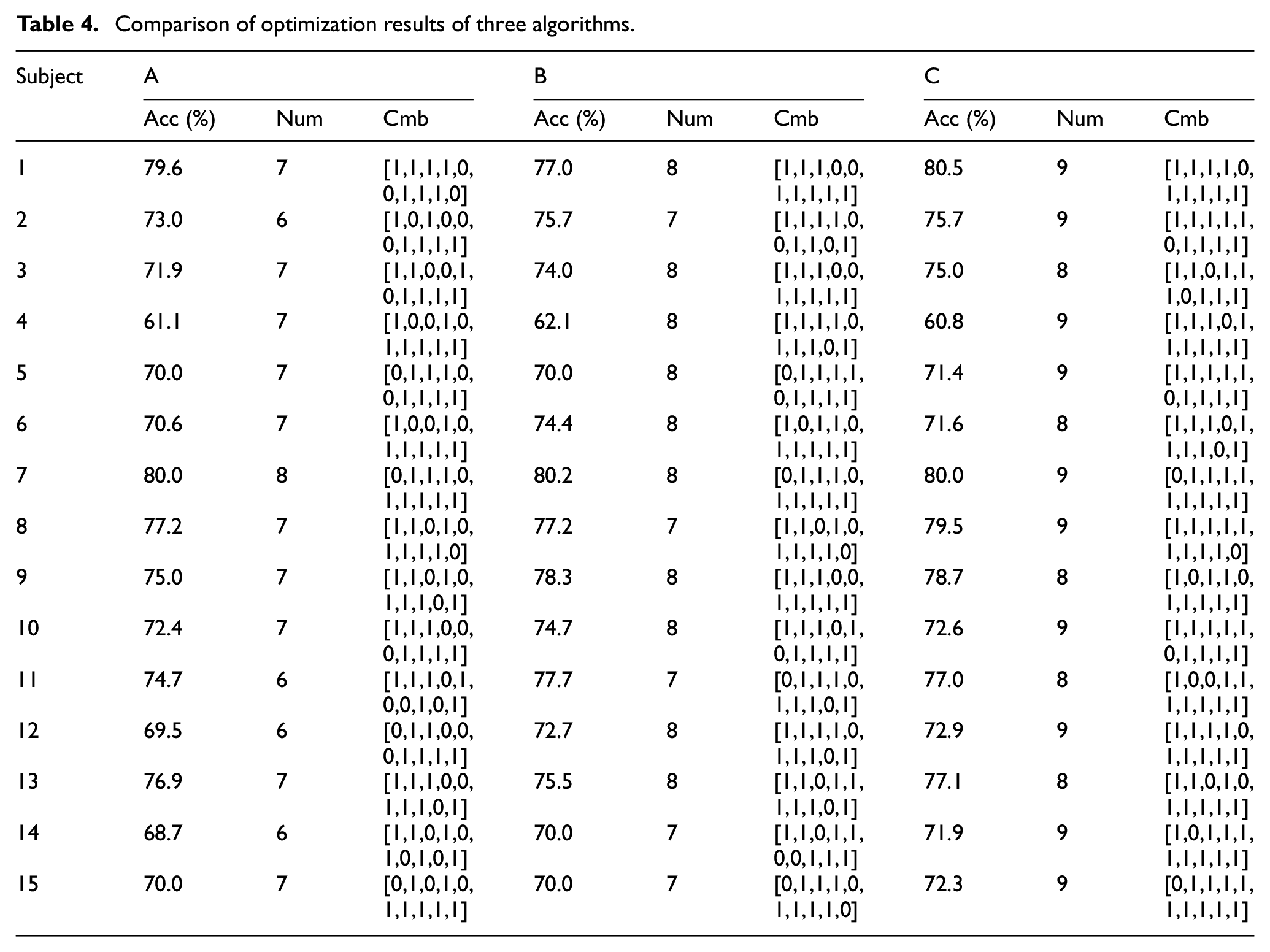
After applying the screening criteria, we compare the final output results of the three algorithms. The combination with the least number of channels and meeting the gesture recognition accuracy threshold is considered the optimal algorithm. We analyze whether there is a unified solution as the optimization result for all subjects and verify the differentiation among subjects. The optimization results of the three algorithms are shown in Table 4, where A indicates the electrode configuration adaptive optimization algorithm, B indicates the ant colony algorithm, C indicates the greedy algorithm, Num indicates the number of optimized channels, Acc indicates the gesture recognition, and Cmb indicates the appropriate combination of channels.
Comparison of optimization results of three algorithms.
Summarize and analyze all channel combinations to determine the adoption rate of the 10 channels, and calculate the average adoption rate of the channels across the three algorithms. This investigation aims to identify channels that consistently provide effective surface electromyography signals. In Figure 6, numbers 1–10 correspond to channels 1–10 in the NinaProDB1 dataset. The three colored line segments indicate the channel adoption rates of the final optimization results of the three algorithms, while the shaded area indicates the average adoption rates across the three algorithms.

The adoption rate of all channels of NinaProDB1.
From the data provided in the table and the radar chart, it’s evident that channel 8 consistently exhibits the highest adoption rate, with 100% across all three algorithms. This indicates that data from channel 8 plays a crucial role in gesture recognition tasks. Conversely, channels 5 and 6 have relatively low selection probabilities, with average adoption rates of 38% and 71%, respectively. The adoption rates of the three algorithms show no uniformity, with notable discrepancies in the adoption rates across various channels. For instance, in channel 5, the adoption rate differs by 60% between the greedy algorithm and the electrode configuration adaptive optimization algorithm. Considering the adoption rates of all channels across the three algorithms, it’s apparent that there isn’t a single electromyographic channel configuration that universally satisfies all individual differences. Consequently, personalized optimization of electrode configurations for each individual is necessary.
The comparative experimental results of the three algorithms are shown in Figure 7 and Table 5. The bar chart indicates the number of channels optimized by each algorithm, with the vertical axis representing the number of channels on the left. The line chart indicates the gesture recognition optimized by the three algorithms, with the vertical axis representing the gesture recognition accuracy on the right side. In the Figure 7, CH_a indicates the number of channels for the electrode configuration adaptive optimization algorithm. CH_b indicates the number of channels for the ant colony algorithm. CH_c indicates the number of channels for the greedy algorithm. Acc_a indicates the accuracy of the electrode configuration adaptive optimization algorithm. Acc_b indicates the accuracy of the ant colony algorithm. Acc_c indicates the accuracy of the greedy algorithm. Acc_threshold indicates the threshold accuracy, which is set at 95% of the full channel gesture recognition accuracy, serving as the minimum standard for optimizing the accuracy of the results. In the Table 5, A indicates the electrode configuration adaptive optimization algorithm, B indicates the ant colony algorithm, and C indicates the greedy algorithm.

Comparison of optimization results of three algorithms.
The average number of channels and average accuracy of three algorithms.

From the experimental data, it’s evident that all three algorithms meet the screening criteria. The electrode configuration adaptive optimization algorithm requires the fewest number of channels to achieve optimal results. Among all optimization outcomes, the highest number of channels is 7, while the lowest is 6. Approximately 73.3% of the results utilize 7 channels, with an average of 6.8 channels. The highest gesture recognition accuracy achieved is 79.6%, with an average of 72.7%, demonstrating superior performance. Next, the ant colony algorithm shows the slightly higher requirement for channels, with the highest number of channels being 8 and the lowest being 7 among all optimization results. Around 66.7% of the outcomes utilize 8 channels, with an average of 7.6 channels. The highest gesture recognition accuracy achieved is 80.2%, with an average of 73.9%. Lastly, the greedy algorithm exhibits the highest channel requirement, with the highest number of channels being 9 and the lowest being 8 among all optimization results. Around 66.7% of the outcomes utilize 9 channels, with an average of 8.7 channels. The highest gesture recognition accuracy achieved is 80.5%, with an average of 74.4%. The minimum allowable accuracy is 70.9%, and all three algorithms successfully meet this requirement. Overall, the results indicate that each algorithm has its strengths and can effectively optimize gesture recognition accuracy while meeting the minimum accuracy threshold.
Under the selection criteria for optimizing channels, the electrode configuration adaptive optimization algorithm proposed in this paper stands out by requiring the least number of optimization channels. This characteristic allows it to more accurately identify the optimal solution for electrode configuration, achieve the optimal quantity of electrodes, and demonstrate robust performance.
Application performance of each component of the electrode configuration adaptive optimization algorithm
The main objective of this experiment is to compare and analyze the performance of the improved genetic algorithm and simulated annealing algorithm, both of which are components of the electrode configuration adaptive optimization algorithm and can further verify its effectiveness.
This experiment utilizes the NinaPro dataset, with the same screening criteria and evaluation metrics as the previous experiment. The optimized experimental results are presented in Tables 6 and 7, where Acc indicates the gesture recognition accuracy, Num indicates the number of optimized channels, and Cmb indicates the optimized channel combination.
Comparison between genetic algorithm and simulated annealing algorithm.

The average number of channels and average accuracy of two algorithms.

As the main algorithm in the global search phase, genetic algorithm’s output results are considered as the results of the global search phase. The comparison and analysis results with the electrode configuration adaptive optimization algorithm are shown in Figure 8, where Meet the standards indicates results meeting the screening criteria, 7 channels, 8 channels, and 9 channels are all channels that do not meet the criteria.

Output results of global search phase.
The changes in internal key parameters during the operation of the electrode configuration adaptive optimization algorithm are shown in Figure 9, where the horizontal axis represents the number of iterations, the left vertical axis represents the probability value, and represents the normalized average fitness value. The right vertical axis represents the population size.

Changes in key parameters.
The data in Tables 6 and 7 indicate that the improved genetic algorithm and simulated annealing algorithm both yielded satisfactory optimization results under the screening criteria, with 15 subjects. The genetic algorithm resulted in an average channel number of 7.5 and an average accuracy of 74.0%, while the simulated annealing algorithm yielded an average channel number of 7.53 and an average accuracy of 73.9%. Therefore, both algorithms are reasonable and effective as components of the electrode configuration adaptive optimization algorithm.
In Figure 8, this section of the experiment compares the results of the genetic algorithm with the results of the electrode configuration adaptive optimization algorithm obtained in the previous experiment. This comparison analyzes the global search phase and the final local search phase of the algorithm. The data shows that 67% of the results from the genetic algorithm are consistent with those of the electrode configuration adaptive optimization algorithm. In the remaining 33%, 20% have 8 channels, 6% have 7 channels, and 7% have 9 channels. This indicates that the genetic algorithm, as the primary algorithm for global search results, plays a crucial role in the entire electrode configuration adaptive optimization algorithm, consistent with its efficient global search capability. Of course, the limitations of simple genetic algorithm cannot be ignored. In cases with a large search space, it can easily fall into local optima, as evidenced by the 33% of undesirable results in the experiment. Therefore, the role of the simulated annealing algorithm in the entire electrode configuration adaptive optimization algorithm is equally important. For these reasons, the electrode configuration adaptive optimization algorithm, composed of the genetic algorithm and the simulated annealing algorithm, exhibits more efficient optimization performance and broader application scenarios.
The population, mean fitness, and crossover probability are three key internal parameters of the electrode configuration adaptive optimization algorithm throughout the entire operation process, as shown in Figure 9. According to the data, when the number of iterations reaches 300–350, the accuracy of gesture recognition converges to the target accuracy, which is 95% of the full channel accuracy. At this point, the population size is reduced from 20 to 10 to enhance subsequent search efficiency. The mean fitness value is normalized and shows an upward trend as the number of iterations increases. This indicates that the algorithm is continuously optimizing individuals within the population to gradually approach the target accuracy. The increase in the mean fitness also reflects the improvement of individual fitness in the population, indicating that the solution found by the algorithm is getting closer to the optimal solution. The initial crossover probability is set to 0.1. Its overall trend shows an initial increase followed by a decrease. This pattern embodies the algorithm’s “global-to-local” search strategy. In the initial phase, the population’s overall mean fitness is relatively low, requiring a rapid increase in crossover probability to enhance population diversity and expedite the discovery of more desirable solutions. As the iteration count increases, the mean fitness gradually rises, leading to increasingly superior individuals within the population. The search range of the solution space gradually narrows. The algorithm enters the local search phase, where it is necessary to reduce the crossover probability to prevent the destruction of the already formed excellent solutions.
In conclusion, genetic algorithm and simulated annealing algorithm, as components of electrode configuration adaptive optimization algorithm, exhibit a significant synergistic effect, effectively enhancing the algorithm’s performance and expanding its applicability. The improved algorithm introduces a dynamic adjustment mechanism for population size and crossover probability, further enhancing the efficiency of the algorithm, making the electrode configuration adaptive optimization algorithm more flexible while maintaining efficient search, and able to play an important role in a wider range of application scenarios.
Comparison of optimized channels with other channels
In the previous experiment, the electrode configuration adaptive optimization algorithm was utilized to optimize the surface electromyographic signal channels of 15 subjects in the NinaPro dataset. The primary objective of this experiment is to compare and analyze these 15 optimized optimal channels with other channels.
The optimal number of channels obtained through the electrode configuration adaptive optimization algorithm is denoted as

Among them,
The main evaluation indicator for experimental comparison is gesture recognition accuracy, and the ranking proportion of the best channel in all combinations is calculated. Ranking proportion is an objective and effective indicator that reflects the accuracy of the electrode configuration adaptive optimization algorithm in terms of optimization results. The experiment stipulates that the channel combination with the top 5% ranking proportion is acceptable. The experimental results are shown in Figure 10. The bar chart indicates the ranking proportion of the optimization results of 15 subjects, where a higher ranking proportion signifies a better optimization effect. The yellow dashed line indicates the lowest standard for ranking proportion specified in the experiment, and the value below this indicates poor optimization effect.

Comparison of optimized channels with all other channel combinations.
p.s:
Based on the chart data in Figure 10, the electrode configuration adaptive optimization algorithm identified the optimal channel within the top 5% of all channel combinations for each of the 15 subjects. This means that the results obtained by the algorithm fall within the realm of ideal solutions. Even though these results may not represent the absolute unique optimal solution, the gap between them and the unique optimal solution is no greater than 5%. Subject 3 achieved a 95% ranking, while other subjects attained rankings above 95%. Notably, subjects 1, 2, 5, 6, 7, 11, and 14 demonstrated optimal results with a ranking of 100%, indicating the unique optimal solution among all channel combinations.
Taking subject 3 as an example, in Figure 11, the accuracy of the full channel is 74.2%, and the 95% threshold for this subject is 70.5%. Therefore, from the screening criteria, only channel combinations with an accuracy higher than 70.5% can be considered ideal solutions. In the previous experiment, the electrode configuration adaptive optimization algorithm has obtained the optimal combination of [1,1,0,0,1,0,1,1,1], with 7 channels and an accuracy of 71.9%, which meets the requirements. In this section of the experiment, all combinations with a channel number of 7 are listed. According to the combination formula, there are a total of

Experimental results of subject 3.
These findings establish the statistical significance of the electrode configuration adaptive optimization algorithm across the 15 subjects. This algorithm can identify the optimal distribution of electrode positions among all possible combinations with the same number of electrodes, thereby achieving the optimal configuration of electrode positions.
The application of algorithms on the BIT-Hand platform
The preceding experiment demonstrated the efficacy of the electrode configuration adaptive optimization algorithm proposed in this paper when applied to the NinaPro dataset. Nonetheless, given the limited theoretical research on the NinaPro dataset, further experimental verification is necessary to assess the algorithm’s performance in practical application scenarios. Therefore, in this experiment section, sEMG data was collected using the OpenSignals collection platform. Subsequently, the electrode configuration adaptive optimization algorithm was employed to configure electrodes for various individuals. The resulting electrode configuration scheme was then determined and implemented in the BIT-Hand intelligent prosthetic hand, thereby demonstrating the practical applicability of the electrode configuration adaptive optimization algorithm.
The individual differences among the 10 subjects in this experiment encompass factors such as body mass index, work type, and handedness. Detailed information regarding these aspects has been outlined in the dataset section earlier. The results of channel optimization are shown in Table 8, where Acc_before indicates the gesture recognition accuracy before optimization, and Acc_after indicates the gesture recognition accuracy after optimization.
Actual optimization results on the BIT-Hand platform.

The individual differences Venn diagram is shown in Figure 12. In the Venn diagram, the individual differences among the 10 subjects, such as body mass index, handedness, and work type, played a significant role in influencing channel allocation optimization. The experimental findings revealed distinct differences in channel optimization results across the 10 subjects, underscoring the electrode configuration adaptive optimization algorithm’s capability to tailor electrode configurations to individual disparities. Moreover, the electrode configuration in this experiment predominantly yielded optimized channels numbering around 4–5. The combinations of channels derived from the experiment suggest that among the eight selected muscle groups, extensor carpi ulnaris, extensor carpi radialis longus, flexor carpi radialis, and extensor digitorum exhibited relatively robust activation, corresponding to channels 2, 3, 4, and 8.
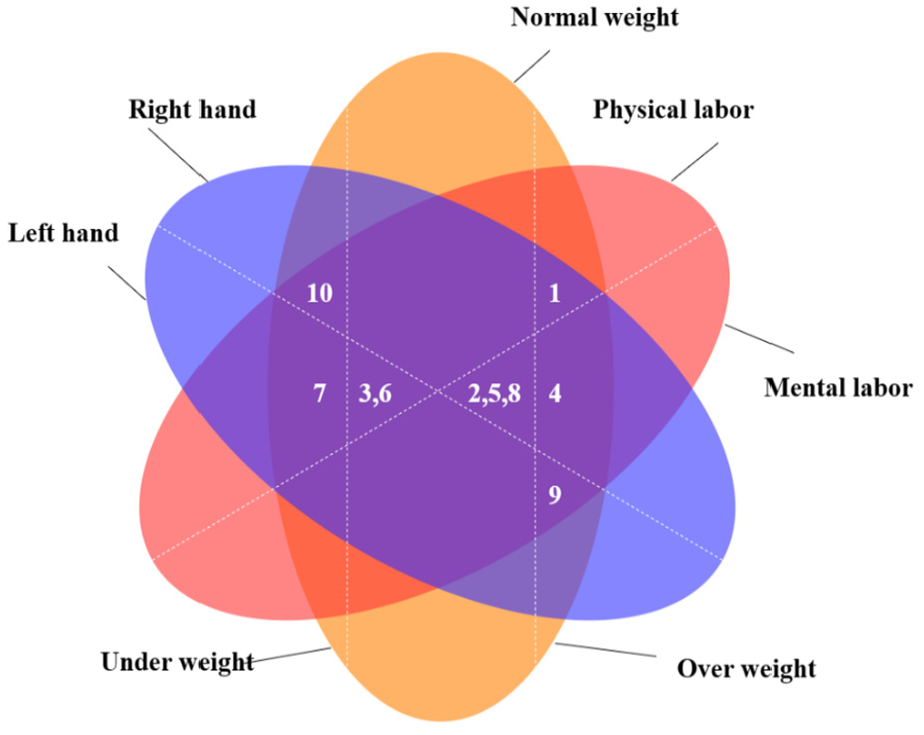
Individual differences Venn diagram.
Each subject’s channel optimization scheme was individually applied to the BIT-Hand. The experiment involved subjects wearing electromyographic sensors and performing seven distinct gesture actions. BIT-Hand recognized these gestures and executed corresponding actions. The experiment result is shown in Figure 13.
BIT-Hand gesture recognition using electrode configuration adaptive optimization algorithm.
The experiment demonstrates that individual differences lead to varying optimization outcomes in electromyographic channel configurations across different subjects, posing a challenge to devising a unified optimization plan. The performance of the electrode configuration adaptive optimization algorithm in optimizing the electromyography acquisition channel in the BIT-Hand is consistent with the theoretical results, proving that the algorithm also performs well in practical application scenarios.
Conclusion
Due to differences in muscle strength, body mass index, and exercise habits among individuals, significant individual differences may arise. However, current electromyographic prosthetics rely on standardized electromyographic channel configurations, which exhibit poor adaptability to these differences. This paper proposes an electrode configuration adaptive optimization algorithm. Leveraging traditional genetic algorithms and simulated annealing algorithms, the algorithm incorporates the dynamic population mechanism to enhance overall computational efficiency. Additionally, the adaptive crossover probability mechanism is integrated into the genetic strategy to improve the algorithm’s exploration performance. Theoretical analysis and experimental results of the electrode configuration adaptive optimization algorithm demonstrate its capability to address individual differences among subjects. The algorithm effectively determines the optimal number and spatial distribution of surface electromyography acquisition channels, ensuring accurate recognition of subject motion intentions, reducing signal acquisition costs, and exhibiting robustness.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.