
Abstract
The manipulation of large workpieces often requires manipulators with complex structures and high stiffness to ensure stability and precision during operation. In situ processing equipment is typically employed for this purpose, comprising a mobile carriage (CGA), mechanical arms, and parallel processing units. The end mechanism of in situ processing equipment must exhibit high rigidity and a wide range of motion in order to effectively satisfy the high-efficiency processing requirements of large and complex structural components. This paper presents a comprehensive process for the topology synthesis of double-layer parallel mechanisms and conducts research on its topology synthesis. Firstly, a comprehensive analysis is conducted on the number and types of degrees of freedom required for basic tasks such as stretching, derotating, twisting, and grasping. This results in the simplest mathematical expression for continuous motion corresponding to the processing tasks. Subsequently, the double-layer superimposition principle of the parallel mechanism is elucidated in accordance with the requirements of the processing tasks. Proposed are anticipated motion patterns and allocation methods. Furthermore, the standard chains are analyzed and characterized based on the desired motion patterns. Derived standard chains that satisfy the desired motion patterns are obtained through joint equivalent transformations. Finally, the assembly conditions are determined in order to obtain the various available configuration structures that satisfy the processing requirements. This study proposes a novel manipulator design that can precisely control the motion of the end platform using only one set of drives, significantly improving the stability and precision of large workpiece manipulation, a challenge that has not been fully addressed in the existing literature. This provides a robust theoretical foundation for the subsequent development of in situ processing equipment.
Introduction
The manufacturing industry attaches great importance to the design, manufacture, and measurement of large and complex components. 1 The dimensions of such large fuselage components have far exceeded the processing stroke of existing machine tools. The cost of developing large, specialized processing equipment is high, and it is used infrequently, resulting in significant waste of resources and a sharp increase in production costs.2,3 There is a clear and growing demand for the efficient processing of large-sized components and integrated processing capability of assembly bodies. 4 The utilization of mobile robot systems represents a promising avenue for future research and development. The system offers low cost, high flexibility, good accessibility, strong reconfigurability, and high mobility.5,6 Although mobile robotic systems with serial robotic arms have emerged as a new option for processing large components, they face numerous limitations in practical applications.7–9 It is evident that serial robotic arms are unable to withstand the weight of heavy loads or the alternating loads that are typical of many industrial applications. It is evident that traditional parallel mechanisms exhibit low flexibility and a smaller workspace. Some scholars have connected two or more parallel mechanisms to create a double parallel mechanism, with the goal of expanding the working space of the original mechanism. Min10–13 creatively introduced the concept of cross-linked double parallel mechanisms, where the moving platform of the first stage mechanism is positioned between the moving and fixed platforms of the second stage mechanism. Li14,15 developed a robotic arm with a large workspace by superimposing two 3-RPS mechanisms, each of which already had a large workspace. This design doubled both the positional and orientational workspace. Rupp.1,16–18 proposed a five-degree-of-freedom hybrid mechanism, using a 2-RPU + SPR mechanism as the parallel module, which can be applied in aircraft wing assembly. Feng et al.5,6,19 studied the configuration synthesis, kinematics, and prototype development issues related to Exechon-like mechanisms. Germany’s Metrom company has developed a five-axis linked parallel robot that is lightweight, modular, and mobile. 20 Spain’s LOXIN21,22 company has developed a hybrid virtual-axis processing equipment that can be used for drilling and riveting. A binocular vision system has been integrated into the end effector in order to achieve precise positioning during processing. Miller. 23 proposed a double-layer hybrid mechanism comprising a mobile parallel mechanism and a rotational parallel mechanism in series. Johnson 24 put forth a hybrid manipulator configuration comprising a double-layer structure with three 3-UPU mechanisms in series. A number of techniques have been developed to enhance the workspace of parallel mechanisms, including scaling optimization without modifying the original mechanism structure. 25 Furthermore, some researchers have proposed stacking two parallel mechanisms on top of each other. 26 While this method does indeed enlarge the workspace of the mechanism, it requires two sets of drives, which inevitably increases the weight of the mechanism itself and reduces its dynamic performance.
The topology synthesis of parallel mechanisms refers to the systematic and comprehensive construction of the specific configuration of a mechanism based on the desired motion characteristics. This construction primarily focuses on the configuration of kinematic chains, which involves the types, numbers, and arrangement of joints, as well as the geometric orientation between these joints. Wright27,28 synthesized the first symmetric 4-degree-of-freedom 4-URU parallel mechanism based on screw theory. Phillips29,30 conducted systematic configuration synthesis research on lower-degree-of-freedom parallel mechanisms, resulting in a series of new models with symmetric 3-DOF, 4-DOF, and 5-DOF parallel mechanisms. Subsequently, Kong and Adams 31 also used screw theory to perform topology synthesis of parallel mechanisms and developed a method for synthesizing virtual chain configurations. Evans 32 proposed a topology synthesis method based on finite screw theory and performed topology synthesis for a class of three translational parallel mechanisms, introducing several new types of parallel mechanisms. Anderson 33 used this method to analyze and describe the continuous motion of a translational and two-rotational parallel mechanism with accompanying motion, and completed the configuration synthesis research.
This paper will concentrate on the topology synthesis of a double-layer parallel mechanism. The following section outlines the organizational structure. In Section “Finite and instantaneous screw theory,” we provide a brief introduction to the FIS (Finite and Instantaneous Screw) theory as the initial and complete motion description for the double-layer parallel mechanism. In Section “Target motion analysis,” we analyze the fundamental machining operations and derive the most basic mathematical expressions corresponding to continuous motion for the machining operations. In Section “The superposition principle,” the double-layer stacking principle of the double-layer parallel drive mechanism is revealed, along with the proposed anticipated motion patterns and the double-layer allocation method. In Section “Topology synthesis,” the topology synthesis of the double-layer parallel drive mechanism is conducted, and finally, conclusions are drawn in Section “Conclusions.”
Finite and instantaneous screw theory
Rigid body motion is divided into two categories: finite motion and instantaneous motion. Finite screws are used to describe continuous motion, while instantaneous screws are used to describe instantaneous motion. FIS theory is the most concise and effective mathematical tool for describing rigid body motion. It organizes finite and instantaneous screw into a single, unified six-dimensional pseudo-vector form. Chasles’ theorem states that the motion of a rigid body between any two states can be equivalent to a helical motion around a certain spatial axis. This means that the motion can be represented as a combination of rotational motion around a fixed axis and translational motion along that axis. Therefore, the finite motion of a rigid body can be fully characterized by the axis (

Where
Where
A rigid body in its initial configuration will instantly move at a velocity around the rotation axis.

Where
It is a fact that rigid body motion displacement and velocity satisfy differential mappings. Furthermore, finite screw and instantaneous screw also satisfy:

Where
As shown in Figure 1, representing the instantaneous motion of the rigid body,

Instantaneous motion of a rigid body.
As shown in Figure 1,
Finite and instantaneous screw theory is represented in the form of bivectors. These possess nonlinear characteristics that prevent them from forming a linear vector space. It is therefore clear that operations involving finite spinors are nonlinear. In FIS theory, the composition of multiple motions requires the trivector product of the screw. Therefore, the finite and instantaneous screw of a rigid body can be composed through the trivector product operation as follows:

Where
In FIS theory, the composition of multiple motions is performed using the screw triangular product. For example, when a rigid body undergoes two consecutive motions,
FIS theory is used as a mathematical tool in the configuration synthesis of parallel mechanisms. The most commonly used joint types include R (revolute joint), P (prismatic joint), H (helical joint), U (universal joint), C (cylindrical joint), and S (spherical joint). In the configuration synthesis process, other types of joints are typically simplified into either R or P joints. The configuration synthesis of parallel mechanisms involves joint position replacement and equivalent replacement of joint types.
Target motion analysis
This chapter aims to study the application of double-layer parallel mechanisms in large component tasks, enabling various operations such as grasping, derotation, twisting, and stretching. Based on Finite and Instantaneous Screw (FIS) theory, it analyzes the manipulation tasks of the processing mechanism, synthesizes different modes of manipulation, and derives the desired motions for the double-layer parallel mechanism.
Figure 2 clearly shows that the double-layer parallel mechanism must accomplish a number of tasks in order to meet the machining requirements. These include stretching, derotation, twisting, and grasping. Different manipulation tasks can be achieved through different motion modes. The motion of the machining manipulation mechanism is uniformly represented through finite and instantaneous screws, in accordance with the theory of finite instantaneous screw. Where
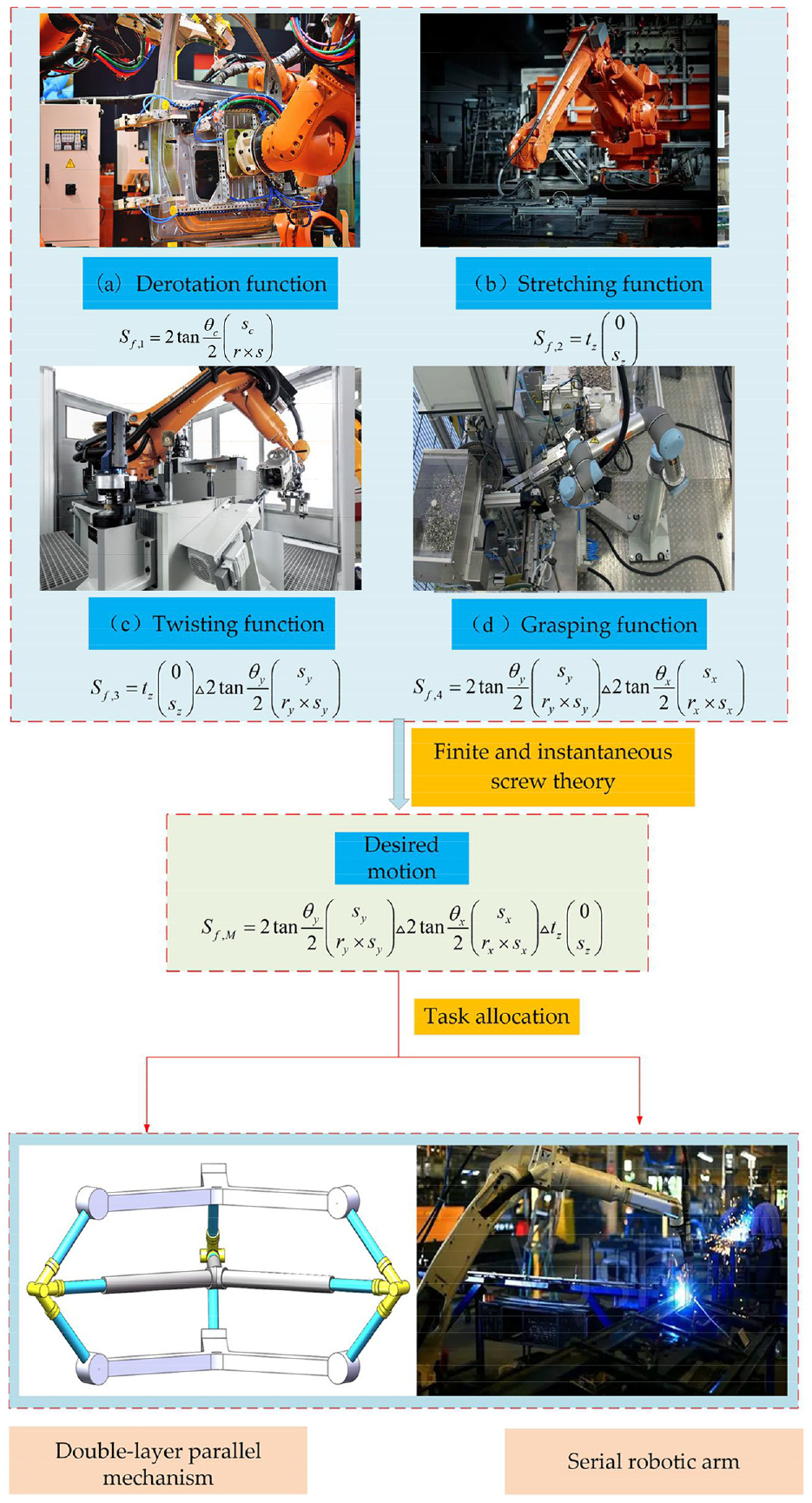
Parameterized description of machining tasks.
The double-layer parallel mechanism is designed to process large workpieces, which requires the mechanism to have translational motion with one degree of freedom in space for extension. Therefore, its finite and instantaneous screw representation for extension is as follows:

The mechanism involves rotational motion, so derotation is mainly used for fitting large workpieces. The mechanism must rotate the manipulation target around its own axis, so its motion is one degree of freedom rotation. The finite and instantaneous screw representation is as follows:

Once the stretching and derotation have been completed, the twisting and grasping functions of the mechanism are used for more precise manipulation of the target object. The following are the finite and instantaneous screw representations:


A unified representation of the finite and instantaneous screw for the functionalities of machining mechanisms allows for the synthesis of the finite and instantaneous screw expressions for these four functions, enabling the allocation of various motion modes. Table 1 shows the allocation methods.
Allocation of functions.

The superposition principle
The principle of superposition has been effectively demonstrated in various studies on mechanics and mechanism design. Martin 34 applied the superposition principle to the type synthesis of parallel mechanisms, providing a fundamental basis for our application of this principle in the design of parallel mechanisms. Further research, such as that by Walker. 35 Has demonstrated how multiple motions can be synthesized through superposition and applied in the topology synthesis of parallel mechanisms using finite screw theory.
These studies offer strong theoretical support for our approach, particularly in analyzing and synthesizing complex motions, where the superposition principle allows us to better understand and design the motion characteristics of double-layer parallel mechanisms.
By superimposing parallel mechanisms, you can effectively increase the workspace of the original mechanism. This method of effectively expanding the workspace of the mechanism is not suitable for all types of parallel mechanisms with different degrees of freedom. It is therefore essential to apply the superposition principle of the double-layer parallel mechanism and utilize the topology synthesis method of the double-layer parallel mechanism in a systematic manner. Figure 3 illustrates the superposition principle of the double-layer parallel mechanism.
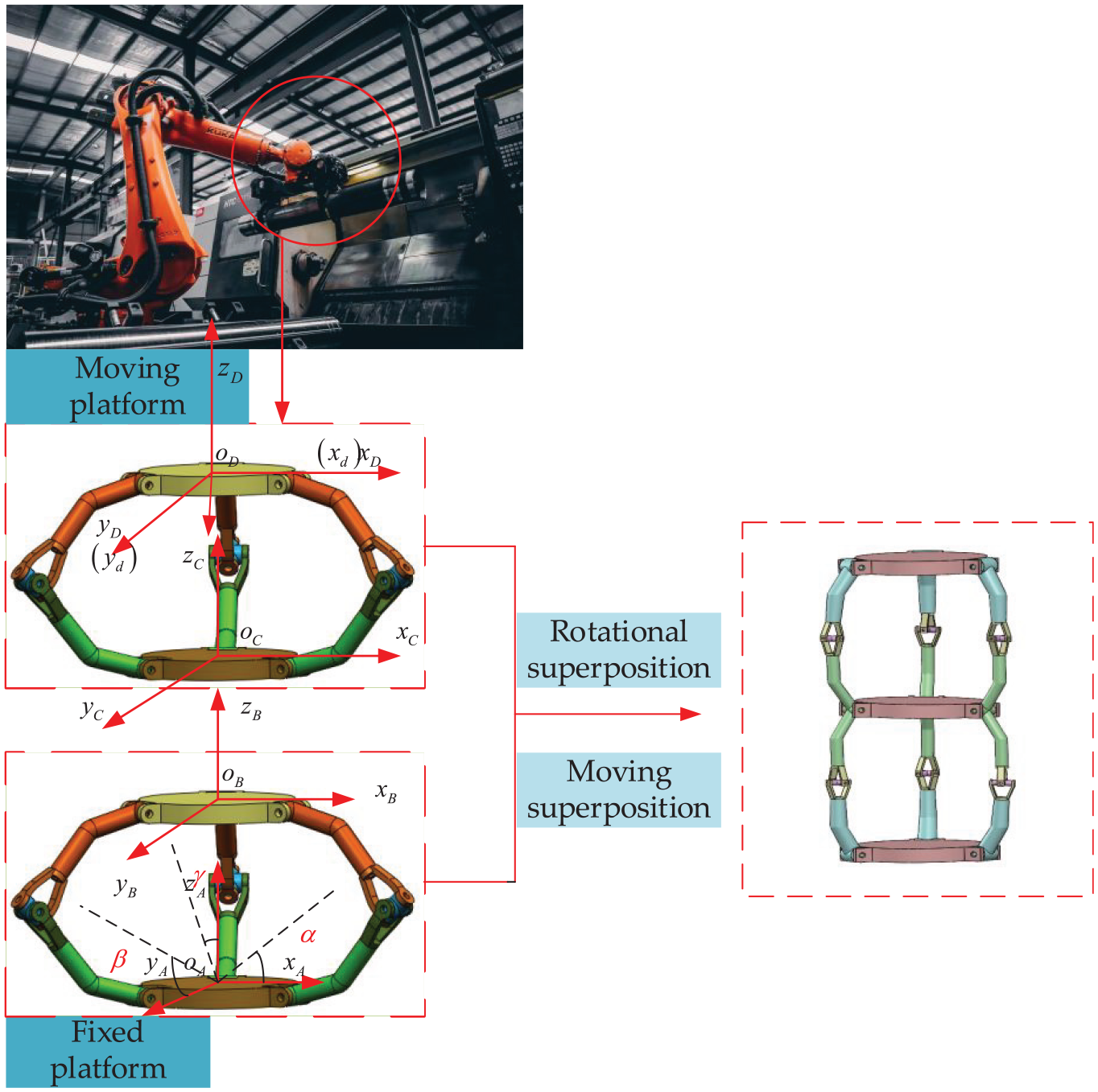
Superposition of double-layer.
Rotational superposition
Establish coordinate system
The coordinate system of the moving platform, denoted as

Due to the mirror symmetry of the upper and lower parallel mechanisms in the double-layer parallel drive mechanism, the description of coordinate system

Using the orthogonality of the rotation matrix, the description of coordinate system

Because coordinate systems

Consequently, the output of the end platform of the dual-layer parallel drive mechanism, namely the orientation description of coordinate system

Arranging, it can be obtained:

Where

From the above equation, it can be seen that the rotational motions around the
Moving superposition
Expressing the movement output of the double-layer parallel drive mechanism in terms of the coordinates of the center point of moving platform. Suppose the moving platform B of the lower parallel mechanism produces displacements of magnitudes

Due to the mirror symmetry of the upper and lower parallel mechanisms in the double-layer mechanism, the displacement of the center of moving platform C relative to fixed coordinate system

The displacement of the center of fixed platform D relative to the moving coordinate system

The transformation matrix from left-handed coordinate system

Suppose the mechanism only undergoes translation without rotation:

The displacement output of the center of fixed platform D relative to the fixed coordinate system

From the above equation, it can be observed that the movement outputs along axes
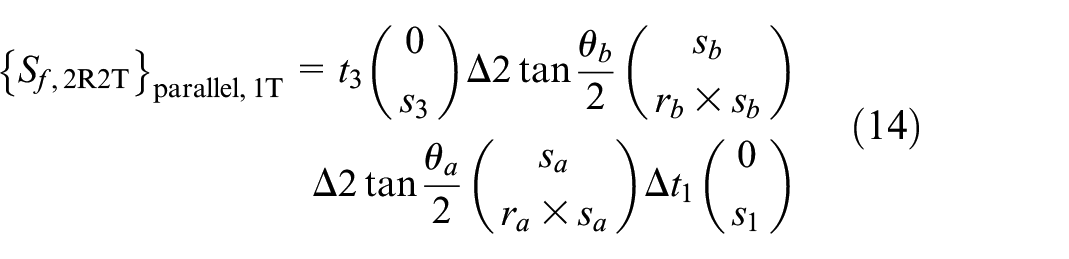
In summary, it is clear that there is a motion cancellation effect for the moving output and the rotating output in the plane of the fixed platform. It has a motion superposition effect on the rotation around the fixed platform and on the movement along the normal of the platform. This paper will therefore focus on the synthesis of the double-layer drive configuration for the 2R1T parallel mechanism.
Topology synthesis
Figure 4 clearly shows that the parallel mechanism is a closed-loop mechanism composed of at least two independently linked branches connecting the moving platform and the fixed platform. The mechanism has at least two degrees of freedom. Each branch of a parallel mechanism can be viewed as a separate serial mechanism. The continuous motion of each branch is the triangular product of the continuous motion of each joint in that branch. The motion of the moving platform in a parallel mechanism is the intersection of the finite motions of the endpoints of m branches. It can be represented as:

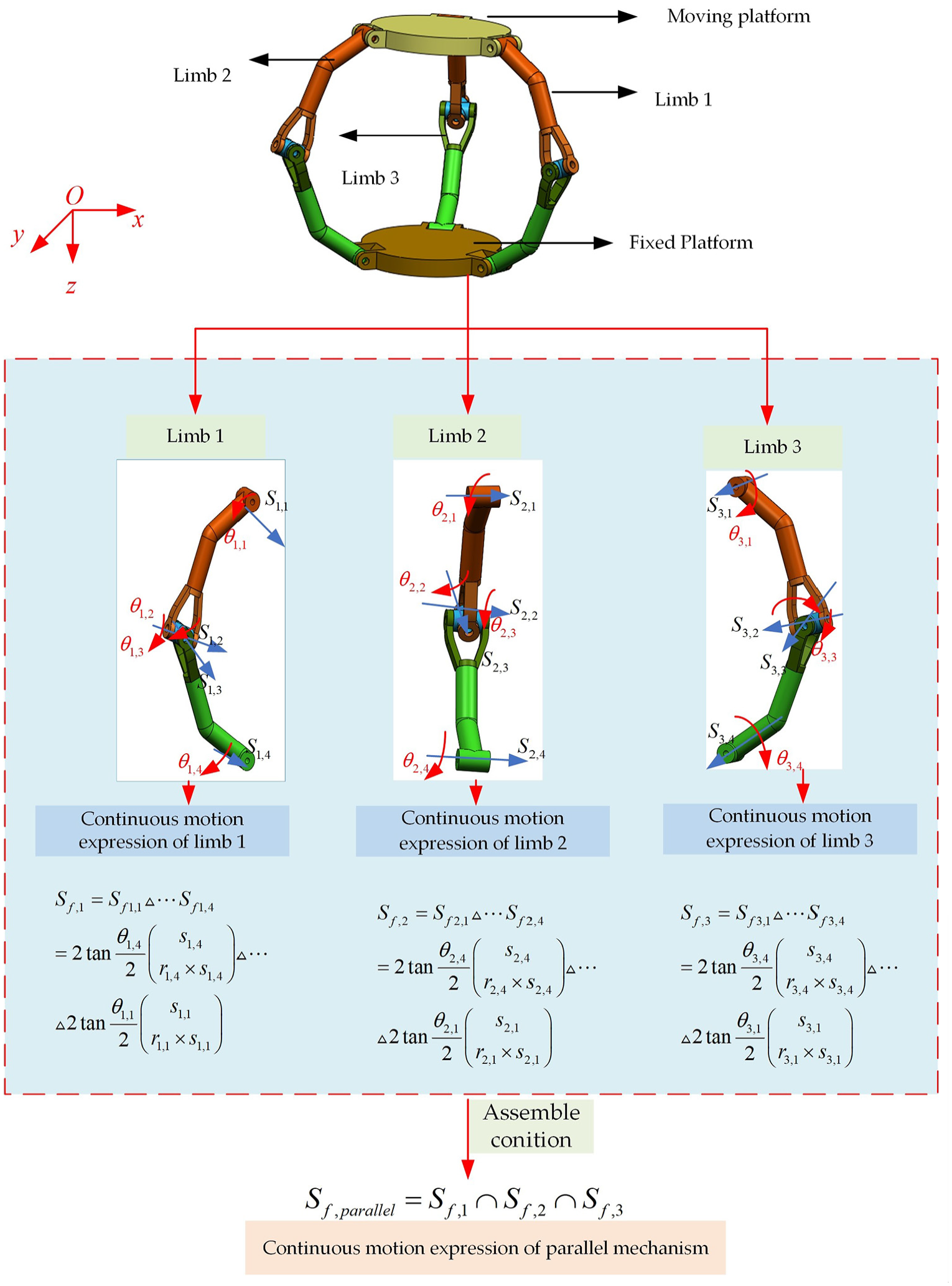
Topology of parallel mechanism.
The comprehensive process diagram for the mechanism limbs is presented in Figure 5.

Limb synthesis process.
Topology synthesis method
The derivation of derivative limbs through joint position transformation and type replacement, based on the theory of FIS, is employed to parametrize the continuous motion of parallel mechanisms. The topology structures corresponding to the assembled conditions are then obtained. On this basis, a double-layer parallel topology structure was further assembled, ultimately achieving the topology structure that satisfied the processing tasks.
The addition of one parameter finite screws, based on the theory of finite instantaneous screws, results in the standard types of parallel mechanisms.

The addition of two parameters finite screws, based on the theory of finite instantaneous screws, results in the standard types of parallel mechanisms.

Performing 4-DOF limbs synthesis, including two standard types of branch chains.
Type 1: 3R1T
Joint type transformation
Replace all P joints in limbs
Joint position transformation
First, the position transformation of the P joints in limb

According to the concept of screw triangle product:

Type 2: 2R2T
Joint type transformation
The derivative limbs of
Method 1: Replace

Method 2: Replace all P joints in limb
Joint type transformation
Based on the type of joint replacement, two derivative limbs were obtained. Since limb
First, the position transformation of the P-joints in limb

Finally, the position transformation of the P joints in limb

The effective limbs can be obtained as shown in Table 2 below:
4-DOF effective limbs.

Performing synthesis of 5-DOF limbs, including two standard limb types.
Type 1: 3R2T
Joint type transformation
The synthesis process for 5-DOF limbs is similar to that of 4-DOF limbs. The derivative limbs for standard limbs
Method 1: Replace

Method 2: Replace all P joints in limb

Joint position transformation
The positional transformation of the P joints in limb
Type 2: 2R3T
Joint type transformation
Method 1: Replacing

Method 2: Replace all R joints in limb

Joint position transformation
The positional transformation of the P joints in limb

The effective limbs are as shown in Table 3.
5-DOF effective limbs.

So far, 15 types of 4-DOF limbs and 12 types of 5-DOF limbs have been synthesized. When using these limbs to assemble parallel mechanism, it is necessary to consider the assembly relationship between the limb motions. According to the design principles defined in Section “The superposition principle,” the parallel mechanism is a 3-DOF mechanism (two rotations and one translation), that is, it should contain three limbs to satisfy the requirements of DOF. Therefore, assembly conditions can be defined based on the cooperative relationship between limb motions. Three limbs in the parallel mechanism need to satisfy the following conditions

As illustrated in Figure 6, the parallel mechanism is defined in terms of continuous motion based on the theory of functional integration (FIS). By applying joint positional transformations and type transformations, derivative limbs can be generated, and corresponding topology structures can be derived based on assembly conditions. Based on this, a double-layer parallel topology structure was further assembled, ultimately achieving the double-layer parallel topology structure that meets the processing tasks.

Topology synthesis flowchart.
Topology results
Referring to the standard branches

Topology synthesis of parallel mechanisms.
Conclusions
This paper primarily focuses on establishing a solid theoretical framework and proposes a novel topology synthesis method. The core content is theoretical research, emphasizing the principles, methodology, and design process of topology synthesis. Since the goal of the study is to lay the groundwork for future practical applications and experimental validation, no specific numerical case studies or experimental results are presented at this stage. Future research will build on this theoretical foundation by incorporating practical applications and numerical validation to further support the proposed method. FIS theory offers more precise control of the motion characteristics of a mechanism. It allows for the accurate synthesis of complex motion patterns (such as rotations, translations, or combinations of both), which can be difficult to achieve using conventional methods. Traditional methods typically rely on simplified models, which might not capture the full complexity of motion in some parallel mechanisms. For double-layer or multilayer parallel mechanisms, such as those used in large-scale industrial applications, FIS theory is particularly advantageous. It allows for the effective combination of multiple layers’ motions, ensuring that each layer contributes optimally to the overall motion of the system, which traditional approaches may struggle to handle efficiently.
This paper presents a parameterized research system for the topology synthesis of double-layer parallel mechanisms, which is of significant importance for advancing the fundamental theoretical research of mechanisms and accelerating the independent innovation and engineering applications of dual-layer parallel mechanisms.
(1) Parameterized descriptions of continuous motions such as stretching, twisting, rotating, and grasping were provided. The simplest mathematical expressions for continuous motion of machining tasks were formed through intersection operations.
(2) Based on the requirements of machining tasks, topology principles for double-layer parallel mechanisms were proposed, and the joint arrangement of the double-layer parallel structure was determined.
(3) Proposed the principle of overlapped motion for exactly driving double-layer parallel mechanisms, providing a mathematical foundation for the topology synthesis of exactly driving double-layer parallel mechanisms.
(4) The standard limbs of the mechanism were parameterized based on the desired motion patterns, and various derived limbs were generated through joint equivalence transformations. New feasible configurations meeting the requirements were synthesized through the synergistic relationship of the limbs.
Footnotes
Handling Editor: Divyam Semwal
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project is supported by Tianjin Science and Technology Plan Project (Grant No. 22JCYBJC01670 and 21JCZDJC00820).