
Abstract
For UAVs unable to take off vertically, a launch device is essential, and accurate launch velocity prediction is crucial. This study develops two mathematical models for both the mechanical and the pneumatic subsystems of the launching system of unmanned aerial vehicles (UAVs) and solves these coupled, highly nonlinear ordinary differential equations by the fourth-order Runge-Kutta method. By applying this multi-physical model to the launching systems of UAVs, the trend with time of the shuttle displacement, velocity, and acceleration, as well as the tank and cylinder pressures in the mathematical results, are similar to those observed in real experiments. Using MATLAB as the platform, this multi-physical model accurately predicts the velocity of the launching system (or dummy), with a maximum error of 9.0% and a minimum error of 4.3% compared to the experimental results. Additionally, this multi-physical model reveals a linear relationship between the frictional force and pull force of the shuttle, which is consistent with the co-simulation results. Overall, these models not only offer the greatest design flexibility to understand and meet the required launching system’s performance, it will also save the cost and time for the efficient R&D procedure of future UAVs’ applications.
Introduction
Unmanned aerial vehicles (UAVs) encompass a diverse range of remote-controlled aircraft that operate autonomously, eliminating the need for onboard pilots. The components of UAV systems typically comprise a control station, payload, air vehicle, navigation system, launching system, recovery system, support equipment, and transportation. 1 This study mainly focuses on the launch device. Usually, UAVs that cannot take-offs vertically or do not have landing gear require a launch device. Launching systems become essential for their deployment.
Francis, 2 Novaković and Medar 3 employed the quality function deployment (QFD) approach to develop quantifiable engineering specifications to meet customer needs. Among the essential requirements identified by customers, the final launch velocity and the capacity to launch mass were deemed crucial. According to research conducted by Novaković and Medar, 3 the most critical aspect in the research and development of launching systems is ensuring that the maximum launching velocity exceeds the stall velocity of the UAV. Additionally, Novaković and Medar 3 suggested that the launching systems’ launching velocity should be at least 15% higher than the stall velocity to ensure safe UAV launches. Therefore, accurately predicting the launching systems’ launching velocity is paramount. The launching velocity of pneumatic launching systems relies on the pressure differential and the mass flow rate of the pneumatic cylinder. Richer and Hurmuzlu 4 advocated pneumatic cylinders as superior to electrical or hydraulic actuators. They developed a mathematical model that characterizes bidirectional pneumatic actuators, allowing for precise predictions of the relationship between pressure differential and mass flow rate within the pneumatic cylinder. Thorncroft et al. 5 employed the principle of conservation of mass to develop a mathematical model, which they utilized to forecast the correlation between pressure and mass flow rate at the throat of the tank throughout the charging and discharging phases. However, Richer and Hurmuzlu 4 and Thorncroft et al. 5 focus on a nonlinear model for pneumatic force actuators but overlooks fluid dynamic effects, leading to reduced accuracy in high-speed or high-pressure conditions. In contrast, our study incorporates fluid dynamics, providing a more detailed description of airflow variations on actuator performance, resulting in more accurate dynamic response predictions in practical applications. Siddiqui et al. 6 believe the Matlab/Simscape can be used reliably to size the pneumatic launching system. They proposed that the simulation error in tank discharge is 4%, and the whole system’s error is within 8%, when they used the Matlab/Simscape to simulate the performance of the UAV Factory’s 6 KJ pneumatic launching system.
The co-simulation method has emerged as a recent trend, extensively employed to comprehend dynamic phenomena and their impacts. Currently, very limited literature discusses UAV pneumatic launching systems, so there is a lack of comprehensive references to discuss launching systems using the co-simulation method. Regarding the study of the pneumatic launching system, Lee et al. 7 conducted a thorough analysis of the velocity performance of the PL-40 launching system using the co-simulation method with Adams and Hypneu. In their study, the results of co-simulation analysis, when compared with realistic launching experiments of a 10 kg dummy launched at 10 bar air tank pressure, showed a velocity error of 3.7%.
A study by Francis, 2 Novaković and Medar, 3 and Siddiqui et al. 6 revealed that the frictional force between the shuttle and the rail was solely attributed to the normal force exerted by the masses of the UAV and the shuttle from the gravity. However, these studies were limited in scope, primarily focusing on static analysis. The derivation of the shuttle’s kinetics model in Lee et al. 7 ’s study points out that the frictional force of the shuttle’s kinetics model is proportional to the pull force during the process of launching the dummy. The results of co-simulation analysis using Adams and Hypneu in Lee et al. 7 ’s study also prove that the frictional force between the shuttle and rail is proportional to the pull force of the shuttle. The relationship between frictional force and pull force is linear, contrary to the content proposed in Francis, 2 Novaković and Medar, 3 and Siddiqui et al. 6 ’s study, where frictional force only considers the normal force generated by the weight of the UAV and shuttle from the gravity. The co-simulation results by Lee et al. 7 indicate that considering only the friction force generated by gravity on the mass can lead to a velocity error of up to 7.5%.
Co-simulation method applies multiple independent software or tools, which can couple different physical domains simultaneously through data exchange or interfaces to consider the interactions between mechanisms and pneumatic systems and account for mutual influences between various systems. This approach can yield results closer to real physical phenomena. In Lee et al. 7 ’s study, although co-simulation produced satisfactory results, obtaining and using these independent software tools is not easy, and the software for co-simulation is expensive. Therefore, if a multi-physical mathematical model can be developed to communicate with two different physical domains and consider their interactions to produce results close to those of co-simulation, it would greatly benefit the research in relevant fields.
The primary purpose of this study is to develop a multi-physical mathematical model to correctly predict the kinematics of the launching system. The tools required for solving the mathematical model can include any software capable of solving equations, such as C language, MATLAB, LabVIEW, etc. In this study, MATLAB is used. The velocity of the dummy is compared with the realistic launching tests in Lee et al. 7 ’s study to verify the reliability and predictability of this multi-physical mathematical model. The frictional force and the pulling force on the shuttle are compared with the co-simulation results in Lee et al. 7 ’s study to verify the linear relationship between the frictional force and the pulling force.
In this research, the target of the study is the pneumatic launching system PL-40, developed by the Estonian company Eli, 8 as shown in Figure 1. According to the test data provided by Eli, the PL-40 is capable of launching a 45 kg UAV to a maximum launch velocity of 15.9 m/s and a 10 kg UAV to a maximum velocity of 26.1 m/s. The components of the launching system are shown in the 3D structure of the PL-40, designed using SolidWorks, as shown in Figure 1. In Lee et al. 7 ’s study, the UAV was replaced by a dummy, and the launching process is divided into three stages in this paper. The first stage involves moving the shuttle to the initial launch position and assembling the dummy on the shuttle. The second stage is the acceleration process of the shuttle and dummy until the tank pressure is charged to the appropriate pressure. The third stage depicts the separation of the dummy from the shuttle, as shown in Figure 2.


A schematic depiction shows the launching system and its position at three distinct moments. 7
Modeling of launching system
Flow chart for computing and analyzing Multi-physical model
The multi-physical system includes the mechanical and pneumatic power sub-systems. The interaction between the mechanical and pneumatic power systems is shown in Figure 3. Firstly, the equations for the mechanical and pneumatic power systems models must be derived based on the actual operation of the PL-40 launching system. The equations of these two nonlinear coupled mathematical models are programmed and solved based on the platform of Matlab using the 4th-order Runge-Kutta method. The fourth-order Runge-Kutta method is based on high-order Taylor series expansion, which not only achieves high-order truncation error O(h
4
), but also eliminates the calculation of all derivatives, and can obtain more accurate results. The thrust force
The schematic diagram illustrates the interaction between the mechanical and pneumatic power systems. 7

The flow chart of computing and analyzing the multi-physical model.
Pneumatic power system
The pneumatic power system includes (a) a tank of fixed volume and (b) a cylinder with a moving piston that connects the mechanical system via a cable.
Some basic assumptions are made for the tank and the cylinder: (1) compressible fluid, (2) Ideal gas, (3) adiabatic expansion process, (4) no head loss and minor loss, (5) uniform properties inside and across the inlet and outlet; (6) the tank volume is constant and large enough, the fluid motion inside the tank is small and random during the expansion process, (7) neglect the body force, (8) The cable, connecting the piston and the shuttle, is assumed rigid, and the cable’s area can be neglect, (9) the potential energy (gZ) are small and nearly unchanged with time.
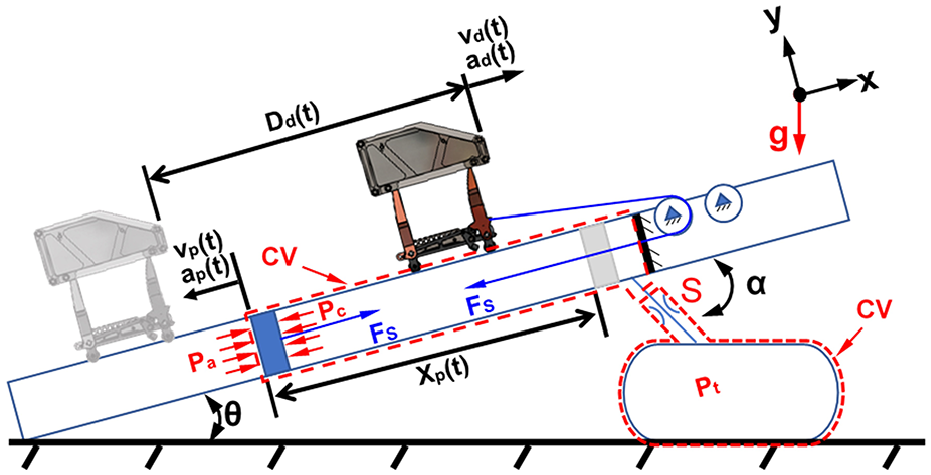
The air tank exhausts the air to the cylinder, as shown in Figure 5. The tank is considered upstream, and the cylinder is considered downstream. The subscripts “t” and “c” in this paragraph denote the tank and cylinder, respectively. The subscripts “in” and “out” represent the states of the inlet and outlet of the control volume (CV) tank and cylinder. S indicates the effect area of the valve.
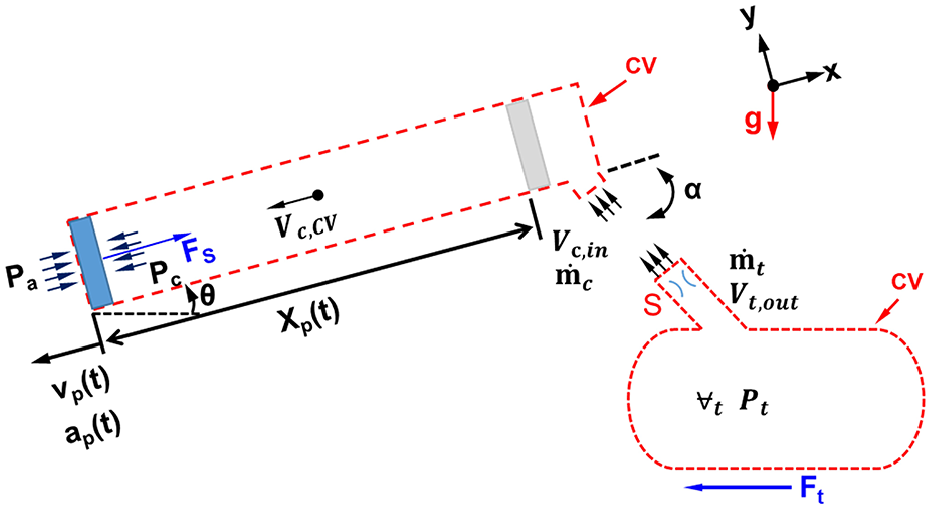
The air tank exhausted air to the cylinder.
When


When


Mathematical model of tank
Mass conservation
As is depicted in Figure 5, consider a fixed control volume (CV) enclosing the whole tank and no inlet to the tank, namely,

Linear momentum conservation
As depicted in Figure 5, the general form of the linear momentum equation in the direction of outflow at the tank is shown in equation (6).

Based on the assumption (6), there is no unified direction of fluid motion except near the exit. Thus,

Energy conservation
The general form of energy conservation is shown in equation (8).

By definition,
The first term of equation (8) is expressed as equation (9).

The second term on the right-hand side (RHS) of equation (8) can be expanded to equation (10).

In equation (7),
Also, the tank volume is fixed, or

The full expansion of equation (8) will be reduced to equation (12)

Based on assumption (9) and random and small velocity V inside the tank, the first and the second terms on the RHS of equation (12) will become equations (13) and (14)
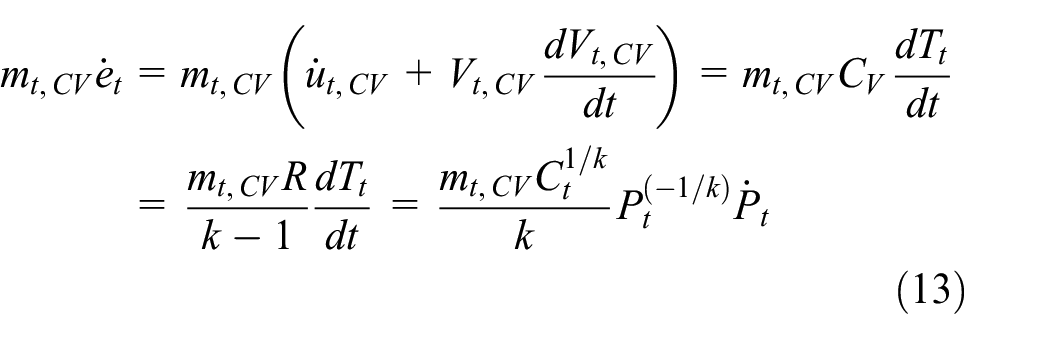

Where
The third term on the RHS of equation (12) can be rearranged into the form of equation (15)

The assumptions (3) state that
Now, equation (12) will be reduced to the form of equation (16).

Equation (16) gives the relation in equation (17). The solution of this equation (17) represents a time-varying pressure starting from the discharge.

Equation (17) is a nonlinear first-order differential equation for
In case of choked flow condition (


In equation (17), the solution of the tank
Mathematical model of the cylinder
Mass conservation
For a deformable CV enclosing the fixed inlet and the movable end-piston of the cylinder, the general form of mass conservation gives equation (20).

Since the CV is taken as a movable boundary at the end-piston, the mass flux across the end-piston will be zero, namely,

Assume the expansion process is adiabatic inside the cylinder.

Where
Since

Where
Linear momentum conservation
As depicted in Figure 5, the general form of the linear momentum equation in the x direction is given as equation (24).

This equation finds the external net force acting on the deformable CV in the positive x-direction. Substitute the above equation (21) into equation (24) and consider the mass flow rate at the end-piston of the movable CV,

Energy conservation
The general form of energy conservation inside the cylinder is given as equation (26).

The first term on the RHS of equation (26) is expressed as equation (27).

The second term on the RHS of equation (26) is expressed as equation (28).

The third term on the RHS of equation (26) is expressed as equation (29).

The full expansion of equation (26) will be reduced to equation (30)

Based on the assumption (9), the first and the second terms on the RHS of equation (30) will become equations (31) and (32).


Besides, the third term on the RHS of equation (30) can be expressed as

The assumptions (3) assume the expansion is adiabatic within the cylinder,

Here,

Inside the cylinder, the end-piston moves at a speed

and thus,




Substitute the above equation (21), equations (35)–(40) into equation (34) and rearrange the energy equation (34), we then have a nonlinear first-order differential equation for the pressure (
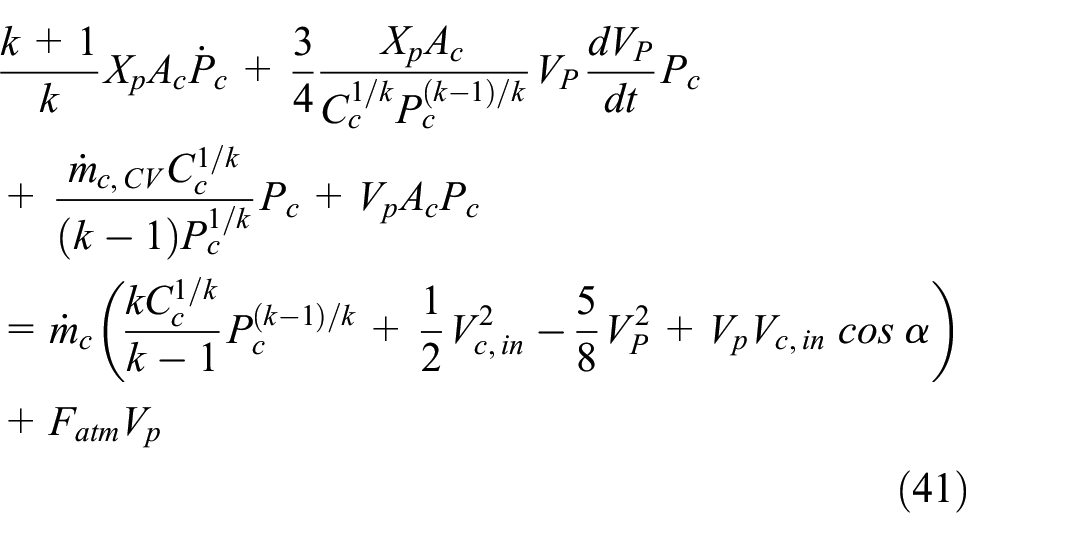
It is a first-order nonlinear ordinary differential equation for the pressure (Pc) inside the cylinder. The initial conditions for
Modeling of mechanical system
The mechanical system includes (a) a fixed rail, (b) a shuttle moving along the rail, (c) an assumed rigid cable connected to the shuttle and the piston, (d) a pulley used to change the direction of the piston force, and (e) the dummy M carried by the shuttle that includes the dummy frame and dummy mass. The shuttle, dummy frame, and dummy mass are shown in Figure 6.

The component of the shuttle
In order to simplify the mathematical model, the following assumptions are made for the mechanical system: (10) compare with the masses of the shuttle and the dummy, the mass of the cable, the pulley, and the piston can be neglected; (11) The motion of the mechanical components is regarded as the rigid body plane motion; (12) Ignore the drag force on the dummy and shuttle during the launching process. (13) The dummy and the shuttle do not separate during launching before reaching the third stage.
The launching process of the dummy is divided into three stages. The first stage is the time duration when the shuttle is kept stationary at an original place; the second stage is the acceleration process of the shuttle and the dummy, and the third stage denotes the instant beyond which the dummy starts to separate from the shuttle. In this study, we focus primarily only on the launching system’s performance in achieving the highest speed during the first and second stages.
First stage
The free-body diagram of the first stage is shown in Figure 7 for the mechanical system. The pull force
The free-body diagram of the first stage. 7
According to Newton’s 2nd law, the force balance in the x direction is shown in equation (42).

The total force applied to the shuttle in the y direction is zero and is shown as equation (43).

The sum of the moment about the wheel A of all the external forces is zero (
Solve equations (42)–(44), the results of



Where




Second stage
The second stage denotes the duration when the shuttle from a static state, including three steps depicted in Figure 8. (a) Shuttle overcomes the maximum static friction between the wheel and the rail; (b) Shuttle starts to accelerate and move forward; (c) The front wheels of the shuttle are lifted and accelerated continuously.
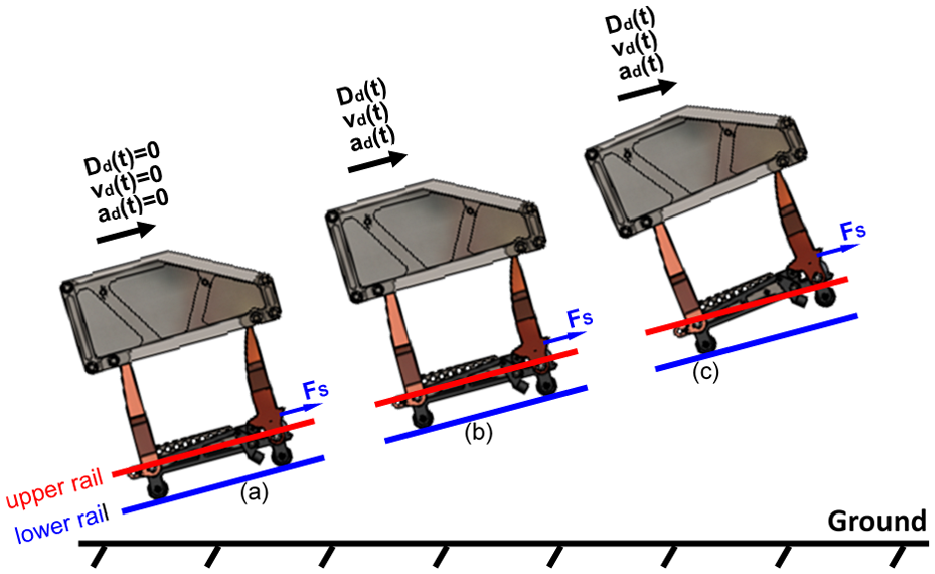
The shuttle’s motion behavior during the three phases of the acceleration process: (a) Overcomes the maximum static friction; (b) Starts to accelerate and move forward; (c) The front wheels of the shuttle are lifted.
Overcoming maximum static friction
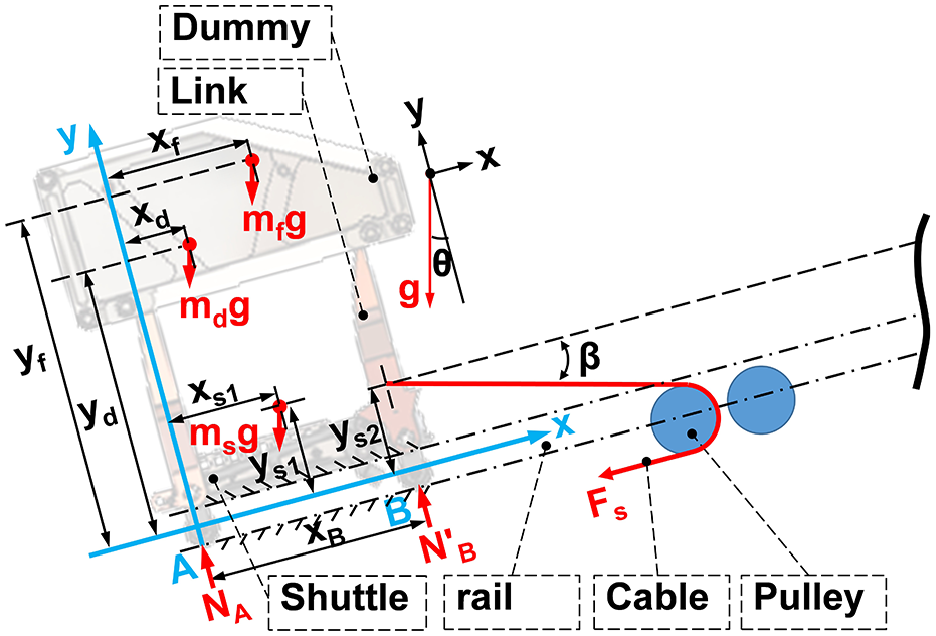
The shuttle will start to move forward until it overcomes the maximum static friction. The free-body diagram of the whole system during this stage is depicted in Figure 9. After the valve of the pneumatic tank opens, the pull force

The free-body diagram when the shuttle overcomes the maximum static friction force. 7
According to Newton’s

The force balance in the y direction is zero and is shown as equation (53).

The sum of the moment of the external forces (
Solving the equations (52)—(54), the results of





Where the μs is the static friction coefficient between the wheels and the rail.
The shuttle start to move forward
Figure 10 illustrates the free-body diagram depicting the forces acting on the shuttle and the dummy, which have overcome the maximum static friction and starts accelerating forward. Based on assumptions (8), (10), and (11) the mass of the cable and pulley can be neglected, and the force

The free-body diagram of the shuttle starts to move forward. 7
According to Newton’s

The total force applied to the shuttle during the movement in the y direction is zero and is shown as equation (61)

The sum of the moment (

Solving equations (60)–(62), the results of





Where the μd is the coefficient of kinetic friction between the wheels and the rail.




The front wheels of the shuttle are lifted
While the pull force
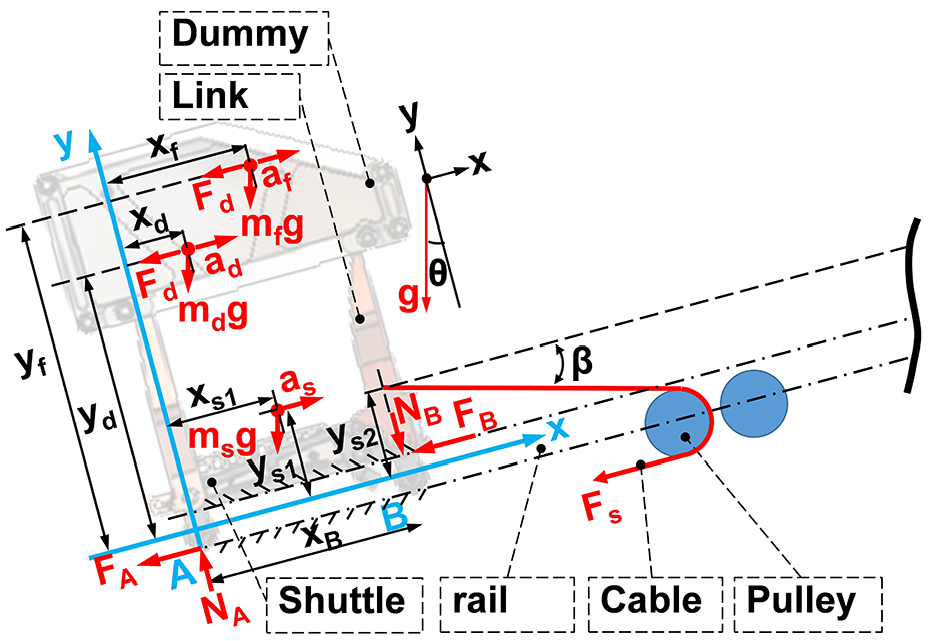
The free-body diagram of the shuttle and dummy when the front wheels of the shuttle are lifted. 7
According to Newton’s

The total force in the y direction is zero and is shown as equation (73).

When the shuttle moves forward, the sum of the moments (

Solving equations (72)–(74), the results of
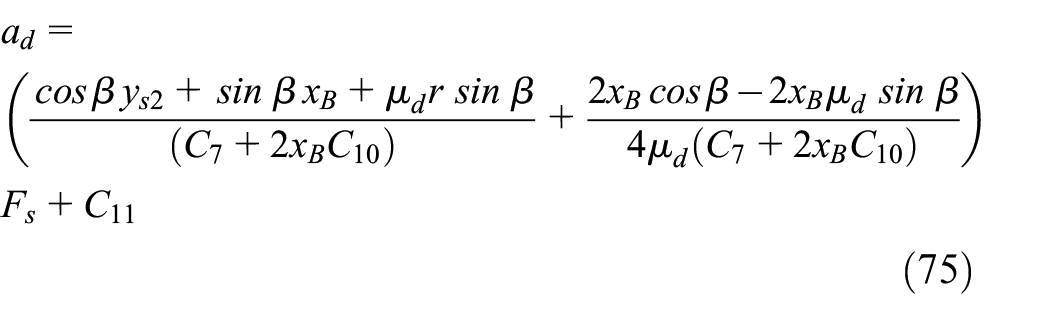




Where



Solve the pneumatic and mechanical system
Based on assumption (8) and (10), the pull force
The dummy velocity


In this study, equations (17), (25), and (41) in pneumatic system and equations (55), (58), (59), (63), (66), (67), (75), (78), (79), (83), and (84) in mechanical system will be solved simultaneously to find the solutions of
In this study, the PL-40 launching system is used as the research target, with a dummy (
The coordinate of the shuttle, dummy frame, and dummy mass.

The parameter in pneumatic and mechanical systems.

Results and discussions
Comparison of predicted velocity with experimental results
The same launching conditions (
The time variation of the predicted tank pressure in Figure 12(a) follows a trend consistent with the experimental results. Comparison of the air cylinder pressures of the predicted results with those of the experimental ones in Figure 12(b), the trends of both cylinder pressures over the studied time duration are consistent. However, the predicted cylinder pressure is significantly higher than that of the experimental results beyond the instant t = 0.15 s (or t > 0.15 s). This study derives that the pressure change of the air pressure system during the launch process is assumed to have no influence from head loss and minor loss. Because the influence of head loss and minor loss is not considered, it can be seen from Figure 12(a) and (b) that the pressure

Comparison between multi-physical results and various experiments in time-variations during the launching process (a) Tank pressure, (b) Cylinder pressure, (c) Dummy acceleration, (d) Dummy displacement. (e) Dummy velocity. (
As is shown in equation (25), the pull force
The comparisons of the mathematical predicted results with the experimental results are shown in Figure 12. It can be observed that when

Comparison between multi-physical results and various experiments in different dummy masses (a)
The comparison of experiment and mathematical results.

The frictional force of multi-physics numerical result
The explanation provided in the preceding section confirms the correctness and reliability of the multi-physical model. The mathematical models of the shuttle are derived in this paper, the frictional force and acceleration of the shuttle are described in equations (75), (78), and (79). As shown in Figure 14(a), both the friction force between the shuttle and the rail, as well as the shuttle’s acceleration, have a linear relationship with the pull force in the shuttle. It can be found that the trend of the frictional force and acceleration related to the pull force of the shuttle of the mathematical models are consistent with Lee et al. 7 ’s co-simulation results. That is, the frictional force in the acceleration process is related to the pull force.

(a) Pull force-variations of acceleration for the dummy and the frictional force between the shuttle and rail. (b) The frictional forces on shuttle wheels (
Equations (78) and (79) determine
In the studies by Francis, 2 Novaković and Medar, 3 and Siddiqui et al., 6 only the frictional force generated by the dummy’s gravity is considered, as indicated by FRef in Figure 14(b). In this study, the maximum frictional force during the acceleration process is 316N, whereas the frictional force considering only the dummy’s gravity, based on the studies by Francis, 2 Novaković and Medar, 3 and Siddiqui et al. 6 is 13N. The frictional force generated by the pull force of the shuttle is much greater than that produced by the gravity of the dummy and the shuttle.
Conclusions
This study is the first to apply a multi-physical method combining mechanical and pneumatic mathematical models to solve engineering problems related to launching systems. This study first applies the multi-physical mathematical model to predict the performance of the launching system, including the displacement, velocity, and acceleration of the dummy, as well as the pressure of the tank and cylinder. This approach can achieve results close to those obtained through the realistic experiments. 7 The parameters of the multi-physics mathematical model can be adjusted according to the actual conditions, offering great design flexibility and potentially significant cost savings compared with that of expensive analyzing software.
The multi-physical model is utilized in this study to estimate the velocity of the launching dummy. The trend of the dummy’s velocity over time matched the experimental results, with a maximum error of 9.0% and a minimum error of 4.3%. The trends of the curves for tank pressure, cylinder pressure, shuttle displacement, and acceleration over time also closely corresponded with the experimental results.
Furthermore, this study revealed a linear relationship between the frictional and pull forces, consistent with findings from Lee et al. 7 The friction force generated by the pull force was significantly greater than that produced by the shuttle and dummy gravity, aligning with the results of Lee et al. 7
Currently, this study does not account for head loss and minor losses, which may lead to higher pressure values in the pneumatic cylinder within the multi-physical model, resulting in greater acceleration and velocity of the dummy. The masses of the cable and pulley may also influence the results. Future research works will incorporate head loss and minor losses in the tank and cylinder, as well as the masses of the cable and pulley, to more accurately estimate the performance of the launching system.
Footnotes
Appendix
Nomenclature

| Symbol | Description | Unit |
|---|---|---|
| The cross-section area of the piston | [m2] | |
| The average acceleration of the gas in the X-direction within the control volume | [m/s2] | |
| The acceleration of the dummy mass | [m/s2] | |
| The acceleration of the dummy frame | [m/s2] | |
| The acceleration of the piston | [m/s2] | |
| The acceleration of the shuttle | [m/s2] | |
| The average acceleration of the control volume in the air tank | [m/s] | |
| B | The critical pressure ratio of gas | [N.A.] |
| The constant ratio of pressure and density for isentropic flow within a cylinder | [N.A.] | |
| The ideal gas specific heat at constant pressure | [J/(°K·kg)] | |
| CS | The control surface of the tank or cylinder | [N.A.] |
| The constant ratio of pressure and density for isentropic flow within a tank | [N.A.] | |
| The ideal gas specific heat at constant volume | [J/(°K·kg)] | |
| The control volume of the tank or cylinder | [N.A.] | |
| The displacement of a dummy | [m] | |
| The displacement of a shuttle | [m] | |
| The diameter of a cylinder piston | [m] | |
| The total specific energy per unit mass within the control volume | [J/kg] | |
| The total specific energy per unit mass within the cylinder | [J/kg] | |
| The differential of the total specific energy per unit mass within the cylinder | [J/(kg·s)] | |
| The total specific energy per unit mass within the tank | [J/kg] | |
| The differential of the total specific energy per unit mass within the tank | [J/(kg·s)] | |
| The frictional force between wheel A and the lower rail | [N] | |
| The piston force from the atmosphere pressure of surroundings | [N] | |
| The frictional force between wheel B and the upper rail | [N] | |
| The frictional force between wheel B and the lower rail | [N] | |
| The drag force of the dummy | [N] | |
| The frictional force | [N] | |
| The pull force on the shuttle | [N] | |
| The total frictional force on the wheels | [N] | |
| The force along the x direction | [N] | |
| g | The acceleration of gravity | [m/s2] |
| The enthalpy of the cylinder at the inlet point | [J] | |
| The enthalpy of the tank at the outlet point | [J] | |
| k | The specific heat ratio of air | [N.A.] |
| Ma | Mach number | [N.A.] |
| The inlet mass flow rate of the control volume of the cylinder | [kg/s] | |
| The gas mass within the control volume of the cylinder | [kg] | |
| The rate of change of gas mass within the control volume of the cylinder | [kg/s] | |
| The inlet mass flow rate of the cylinder | [kg/s] | |
| The outlet mass flow rate of the cylinder | [kg/s] | |
| The mass of the dummy mass | [kg] | |
| The mass of the dummy frame | [kg] | |
| The mass of the shuttle | [kg] | |
| The gas mass within the control volume of the tank | [kg] | |
| The rate of change of gas mass within the control volume of the tank | [kg/s] | |
| The inlet mass flow rate of the tank | [kg/s] | |
| The outlet mass flow rate of the tank | [kg/s] | |
| The outlet mass flow rate of the control volume of the tank | [kg/s] | |
| The normal force of the lower rail to wheel A | [N] | |
| The normal force of the upper rail to wheel B | [N] | |
| The normal force of the lower rail to wheel B | [N] | |
| The atmosphere pressure of surroundings | [Pa] | |
| The gauge pressure within the cylinder | [Pa] | |
| The absolute pressure within the cylinder | [Pa] | |
| The rate of pressure change within the cylinder | [Pa/s] | |
| The initial pressure inside the cylinder | [Pa] | |
| The absolute pressure within the tank | [Pa] | |
| The rate of pressure change within the tank | [Pa/s] | |
| The initial pressure inside the tank | [Pa] | |
| The gauge pressure within the tank | [Pa] | |
| The rate of heat transfer per unit time within the control volume | [J/s] | |
| The rate of heat transfer within the control volume of the cylinder | [J/s] | |
| The rate of heat transfer within the control volume of the tank | [J/s] | |
| r | The radius of wheel A and wheel B. (r = 0.015 m) | [m] |
| R | The gas constant of air | [kJ/(kg·°K)] |
| S | The effective area of the valve | [m2] |
| The air temperature in the air cylinder | [°K] | |
| The initial temperature inside the cylinder | [°K] | |
| The inlet temperature of the air to the air cylinder | [°K] | |
| The air temperature in the air tank | [°K] | |
| The outlet temperature of the air from the air tank | [°K] | |
| The initial temperature inside the tank | [°K] | |
| The specific internal energy | [J/kg] | |
| The specific internal energy within the control volume of the cylinder | [J/kg] | |
| The differential of the specific internal energy within the control volume of the cylinder | [J/(kg·s)] | |
| The specific internal energy within the control volume of the tank | [J/kg] | |
| The differential of the specific internal energy within the control volume of the tank | [J/(kg·s)] | |
| The gas velocity exiting (or entering) the control surface | [m/s] | |
| The average velocity of the control volume in the air cylinder | [m/s] | |
| The average velocity of the gas in the X-direction within the control volume | [m/s] | |
| The inlet velocity of the air cylinder | [m/s] | |
| The dummy’s velocity along the x direction | [m/s] | |
| The piston’s velocity along the x direction | [m/s] | |
| The shuttle’s velocity along the x direction | [m/s] | |
| The average velocity of the control volume in the air tank | [m/s] | |
| The outlet velocity of the air tank | [m/s] | |
| The velocity of the gas in the X-direction | [m/s] | |
| Specific volume | [m3/kg] | |
| ∀ | The control volume | [m3] |
| The volume of the tank | [m3] | |
| The rate of change in volume within the tank | [m3/s] | |
| The work transfer rate of the control volume | [J/s] | |
| The work transfer rate of the cylinder | [J/s] | |
| The work transfer rate of the tank | [J/s] | |
| The value of the x-axis at the center of wheel B | [m] | |
| The value of the x-axis at CG of the dummy mass | [m] | |
| The value of the x-axis at CG of the dummy frame | [m] | |
| The displacement of a piston | [m] | |
| The piston’s velocity along the x direction | [m/s] | |
| The value of the x-axis at CG of the shuttle | [m] | |
| The value of the y-axis at CG of the dummy mass | [m] | |
| The value of the y-axis at CG of the dummy frame | [m] | |
| The value of the y-axis at CG of the shuttle | [m] | |
| The value of the y-axis at the shuttle of the pull force | [m] | |
| ρ | The density of air | [kg/m3] |
| The density of the compressed air in the air cylinder | [kg/m3] | |
| The differential of the density within the cylinder | [kg/(m3·s)] | |
| The initial density inside the cylinder | [kg/m3] | |
| The density of the compressed air in the air tank | [kg/m3] | |
| θ | The angle between ground and rail | [degrees] |
| The angle of the cylinder inlet relative to the rail | [degrees] | |
| β | The angle of the cable relative to the x-direction | [degrees] |
| The coefficient of kinetic friction between wheel and rail. (µd = 0.12) | [N.A.] | |
| The coefficient of static friction between wheel and rail. ( = 0.15) | [N.A.] |
Acknowledgements
This research was supported by the National Science and Technology Council, Taiwan under contracts MOST110 2221-E-005-061-MY3 and NSTC 113-2622-E-005-002-CC2.
Handling Editor: Aarthy Esakkiappan
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Science and Technology Council, Taiwan under contracts MOST110 2221-E-005-061-MY3 and NSTC 113-2622-E-005-002-CC2.