
Abstract
In this study, an algorithm was developed to detect hunting oscillation in railway vehicles using only accelerometers. Typically, the wheel profile of most railway vehicles has a conical shape, causing inherent hunting oscillation. The critical speed at which hunting oscillation occurs is determined by the wheel profile, rail profile, and dynamic characteristics of the railway vehicles. Hunting oscillation significantly impairs ride comfort, reduces running stability, and increases the risk of accidents such as derailment. Therefore, if hunting oscillation occurs during railway operation, it must be detected, and a deceleration procedure should be applied immediately to ensure dynamic stability. The detection algorithm in this study is based on the geometric behavior of the bogie. It utilizes longitudinal and lateral acceleration data from accelerometers installed on the upper frame of the bogie above the axle boxes. The algorithm processes the acceleration data to obtain the hunting oscillation frequency and harmonics, integrating all this data to calculate the Index of Hunting Oscillation. Validation was performed through simulations using a standard electric train model, confirming the algorithm’s effectiveness. Additionally, tests on actual bogies using a roller rig validated the algorithm’s performance in detecting hunting oscillation effectively.
Introduction
Generally, most railway vehicles are configured with two-axle bogies connected to the front and rear of the car body. Each axle of the bogie has wheels on both sides, and the wheel profile of railway vehicles features either multiple straight lines or a combination of straight and circular arc lines. Essentially, the radius of the wheel decreases from the center toward the outside. Due to these characteristics, when the vehicle deviates from the center to one side, the difference in radius between the left and right wheels creates a restoring force that brings it back. This restoring force, along with the creep force that describes the friction between the wheel and rail contact, helps ensure the railway vehicle runs stably along the center of the track. However, when a certain speed is exceeded, the nonlinearity of the wheel-rail contact can suddenly cause large lateral oscillations, known as limit-cycle amplitude, resulting in a phenomenon called hunting oscillation.1,2 Hunting oscillation is an inherent feature of railway vehicles with conical wheel profiles. Although non-conical wheel profiles, such as those consisting only of circular arc lines, can be considered, hunting oscillation is unavoidable due to the characteristic of decreasing radius from the center and the nonlinearity of wheel-rail contact. Hunting oscillation is related to the equivalent conicity determined by the wheel profile and rail surface condition, as well as the vehicle’s running speed. The speed at which hunting oscillation occurs is referred to as the critical speed. 1 However, the stiffness and damping characteristics of the suspension systems connecting the bogies to the axles and the car body to the bogies can also affect the critical speed.3,4 When hunting oscillation occurs, the running stability of the railway vehicle deteriorates significantly, leading to poor ride comfort and safety risks such as derailment. Therefore, it is crucial to detect and immediately decelerate to ensure dynamic stability when hunting oscillation occurs.
To prevent the hunting oscillation phenomenon, it’s desirable to design the characteristics of the suspension systems of railway vehicles such that the critical speed is not lower than the maximum operating speed.5,6 However, as railway vehicles undergo repeated operation, the condition of the suspension systems may change, leading to alterations in their characteristics and potentially resulting in a critical speed that is similar to or even lower than the target operating speed. Additionally, as wear and tear occur on the wheels and rails, the equivalent conicity may change, further decreasing the critical speed. 7 While it’s possible to set the critical speed very high in the design process to account for these factors, this can lead to over-specification of the suspension system. Over-specification can cause increased vibration of vehicle and reduced ride comfort. Furthermore, even with careful design, hunting oscillation can occur unexpectedly due to malfunctions or damage to the suspension systems during operation, or due to poor rail conditions even if the suspension systems are functioning properly.
Preventing hunting oscillation is not easy, so it is necessary to have a method to detect and respond to hunting oscillation when it occurs during vehicle operation. EN 14363 8 sets a criterion that considers a bogie unstable if its lateral acceleration exceeds a certain value (calculated based on the bogie’s mass). However, this criterion is intended for certifying the suitability of manufactured railway vehicles for operation, making it unsuitable for detecting hunting oscillation in actual service. To monitor the instability caused by hunting and other issues during the operation of railway vehicles, condition-based monitoring methods have been researched. For this purpose, model-based techniques9,10 and data-driven techniques 11 have been applied. Zeng et al. 12 proposed a method for detecting hunting behavior by evaluating features of periodic motion in the signal, based on the observation that the bogie frame or axle box moves periodically when hunting occurs. Sun et al. 13 proposed a method for detecting hunting behavior by using the cross-correlation information of the lateral vibrations between the bogie and the car body.
Methods for detecting hunting oscillation with relatively small amplitudes have also been developed. Ning et al. 14 proposed a hunting detection algorithm that combines and analyzes data acquired from multiple sensors. Ye and Ning 15 proposed a method for diagnosing hunting with somewhat low amplitudes, based on lateral, longitudinal, and vertical vibration data of the bogie frame and using “linear local tangent space alignment,” a type of manifold learning. They verified the method using acceleration data measured from actual railway vehicles. However, the method requires an initial learning and recognition process, and if the vehicle’s dynamic characteristics change, the diagnostic performance for hunting may decrease using previous information. Recently, methods have also been proposed for predicting or diagnosing hunting using machine learning techniques.16,17
Simpler methods than those described above have also been developed. Wang et al. 18 identified and analytically validated geometric features from lateral vibrations when wheelset hunting oscillation occurs. They found that if the wheel-rail contact is linear (pure conical tread), only the single dominant frequency is observed. However, if there is nonlinearity in the wheel-rail contact (worn tread), they found not only the single dominant frequency but also odd-order harmonic frequencies. Kulkarni et al. 19 developed an algorithm based on longitudinal and lateral acceleration of the axle box to detect hunting behavior, utilizing phase and amplitude information to detect lateral and yaw modes. However, some parameters in the proposed algorithm need to be obtained from simulations using the analytical model of the actual vehicle, which poses some limitations when applied in practice.
There have been proposals for methods to detect hunting by installing sensors or similar devices on the track instead of using sensors attached to the vehicle. 20 Additionally, methods have been proposed for discriminating hunting behavior without using vibration sensors such as accelerometers, by capturing images of the wheelset and track with a CCD camera and employing image processing and deep learning techniques. 21
So far, numerous studies have been conducted on hunting oscillation detection. In most research aimed at detecting hunting motion, validation has primarily relied on analytical models, with only a few cases validated using actual vehicles. Furthermore, in cases where detection performance is high, the methods often involve relatively complex procedures and require high computational costs, while simpler methods may necessitate prior information about the vehicle’s dynamics, presenting some drawbacks.
In this study, we developed a method for detecting hunting oscillation based on research by Wang et al. 18 and Kulkarni et al., 19 utilizing only acceleration data measured from the bogie. Inspired by the geometric characteristics observed when hunting oscillation occurs in two-axle bogies, the algorithm was designed to effectively detect hunting even with relatively low amplitudes. To verify the performance of the proposed method, we carried out simulations using an analytical model of a railway vehicle. Additionally, we performed experimental validation of the algorithm’s hunting oscillation detection performance using data obtained from roller rig tests with actual railway vehicle bogies.
Development of hunting detection algorithm
Geometric characteristics of bogie hunting motion
In hunting oscillation of bogie, lateral displacement

where, v is velocity of railway vehicle,

Bogie with two-axle.
Equation (1) implies that the stiffness of the primary suspension system connecting the bogie and the axle is infinite. Therefore, due to the actual railway vehicle suspension system having a finite stiffness, determining the hunting frequency using this equation may not be accurate. If the hunting frequency calculated through equation (1) can be used as a reference to detect bogie hunting in actual railway vehicles, it would be sufficient to use sensors to determine whether the hunting frequency calculated from the equation is present. However, as mentioned above, due to the differences from reality, it is difficult to apply. Therefore, to detect bogie hunting in actual vehicles, a method that acquires and analyzes data in real-time is necessary.
In this study, we developed a more effective algorithm for identifying hunting motion in bogies than previous research.18,19 In the developed method, an accelerometer (red box as shown in Figure 2 capable of measuring longitudinal and lateral accelerations) is installed on the bogie frame above the axle box. The signals measured by these sensors are analyzed to identify hunting motion in the bogie.

Schematic of accelerometer installation to bogie.
When hunting motion occurs, the longitudinal and lateral accelerations measured by the accelerometer in Figure 2 are expressed by equation (2), based on the lateral displacement and yaw displacement at the bogie’s COG.


where,
If yaw motion can be assumed by harmonic motion which has only single dominant frequency, it can be expressed by equation (3).

where,
Substituting equation (2) to equation (3), the longitudinal and lateral accelerations measured by the accelerometer can be written by sinusoidal expressions. And then, series expansion expression is derived as equation (4).

In equation (4), the denominator will be too large, if n is over the 2. So, the terms for n > 3 can be ignored because these are too small. Accordingly, substituting equation (4) that range of n is 0–2 to equation (3), equation (5) can be derived.

where,
There are harmonic terms for frequency
However, this is not practical. Hunting oscillation is a nonlinear phenomenon. 7 The harmonic balance method is commonly employed to obtain an approximate analytic solution to such nonlinear problems. To achieve a more comprehensive solution, higher harmonic terms could also be considered. 22 Therefore, equation (7) is more suitable for describing the yaw motion of the bogie compared to equation (3).

Substituting equation (7) into equation (2) and deriving equation (5) is more complex than substituting equation (3) into equation (2). Moreover, we have already identified harmonic terms in the lateral and longitudinal accelerations (equation (2)), even when the yaw displacement is pure sine motion. Therefore, it is more efficient to conduct numerical analysis to determine how equation (7) influences the harmonic terms of longitudinal and lateral accelerations, rather than deriving the equation.
The numerical analysis results are shown in Figure 3, displaying the FFT analysis results of the longitudinal and lateral acceleration measured by the accelerometer attached to the bogie. In Figure 3, the yellow line depicts the results when the magnitude of the harmonic term (
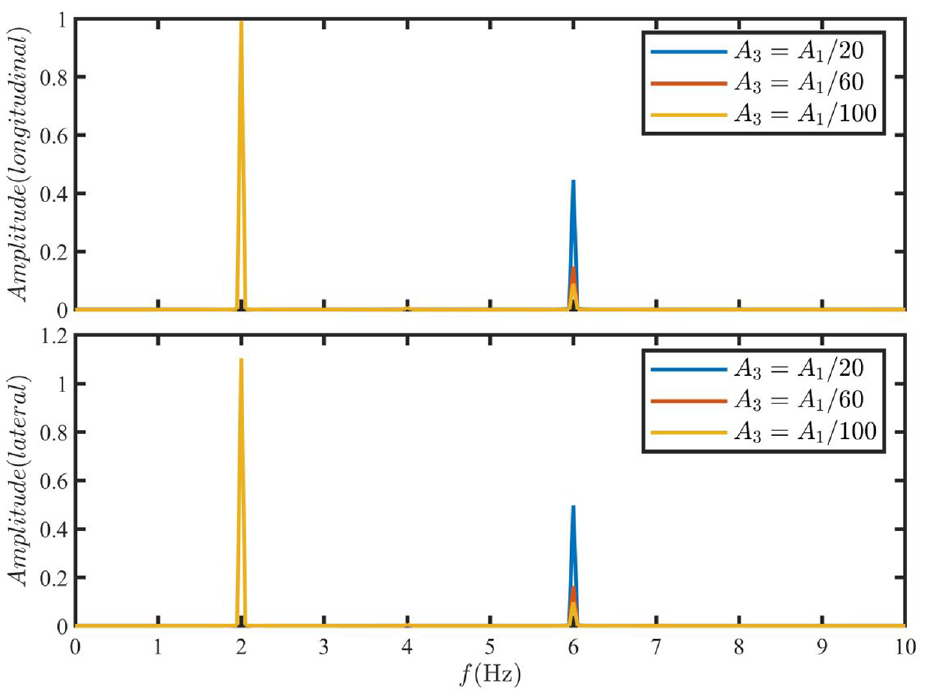
FFT analysis of longitudinal and lateral acceleration for numerical analysis.
Development of detection algorithm for bogie hunting oscillation
As seen in Section “Development of hunting detection algorithm”, it is evident that during bogie hunting oscillation, harmonic terms are clearly observed in the longitudinal and lateral accelerations measured by the accelerometer shown in Figure 2, due to the yaw vibration displacement. Based on these characteristics, this study developed a bogie hunting oscillation detection algorithm using either two accelerometers (one for the longitudinal and one for the lateral direction) or a single accelerometer (using only the longitudinal and lateral axes from a 3-axis accelerometer).
To analyze signals from the accelerometer, a Data Acquisition (DAQ) device is required, and the conditions and signal filtering configuration for implementing the hunting detection algorithm are as shown in Table 1.
Requirements of accelerometer signal.

The flow chart for the hunting detection algorithm is shown in Figure 4. First, real-time signals are measured using an accelerometer (simultaneously for lateral and longitudinal accelerations). The signal must have a sampling rate of at least 400 Hz, and a 4-s length of the signal is stored in a buffer. Generally, the response of the accelerometer is very sensitive, and many unnecessary signals such as noise and high-frequency vibration modes are included in the acceleration data. To eliminate useless signals, signal processing was applied. The recorded 4-s signal was passed through a 15 Hz low-pass filter. The reason for setting the cut-off frequency at 15 Hz is that the frequency of bogie hunting oscillations is typically below this threshold. After filtering the signal, an FFT analysis was performed. Peaks are detected from the analysis results, and only peaks exceeding a magnitude of 1g are sorted in ascending order. Peaks detected from the lateral and longitudinal acceleration signals are compared from the lowest frequency, and if there are identical frequencies between them, that frequency is designated as the hunting frequency. Afterward, the Index of Hunting Oscillation (IHO) is calculated, and if it is 3 or higher, it is determined as “Hunting.” The process of calculating IHO is illustrated in Figure 5. If there are no identical frequencies when comparing peaks from the lateral and longitudinal acceleration signals, and the difference between similar peak frequencies is less than or equal to f i (frequency resolution of FFT analysis result), the lateral peak frequency at that time is designated as the hunting frequency. If the hunting frequency is not designated, the status is determined as “Stable.” The key point of the hunting detection algorithm is to identify the harmonic terms in the measured acceleration signals.
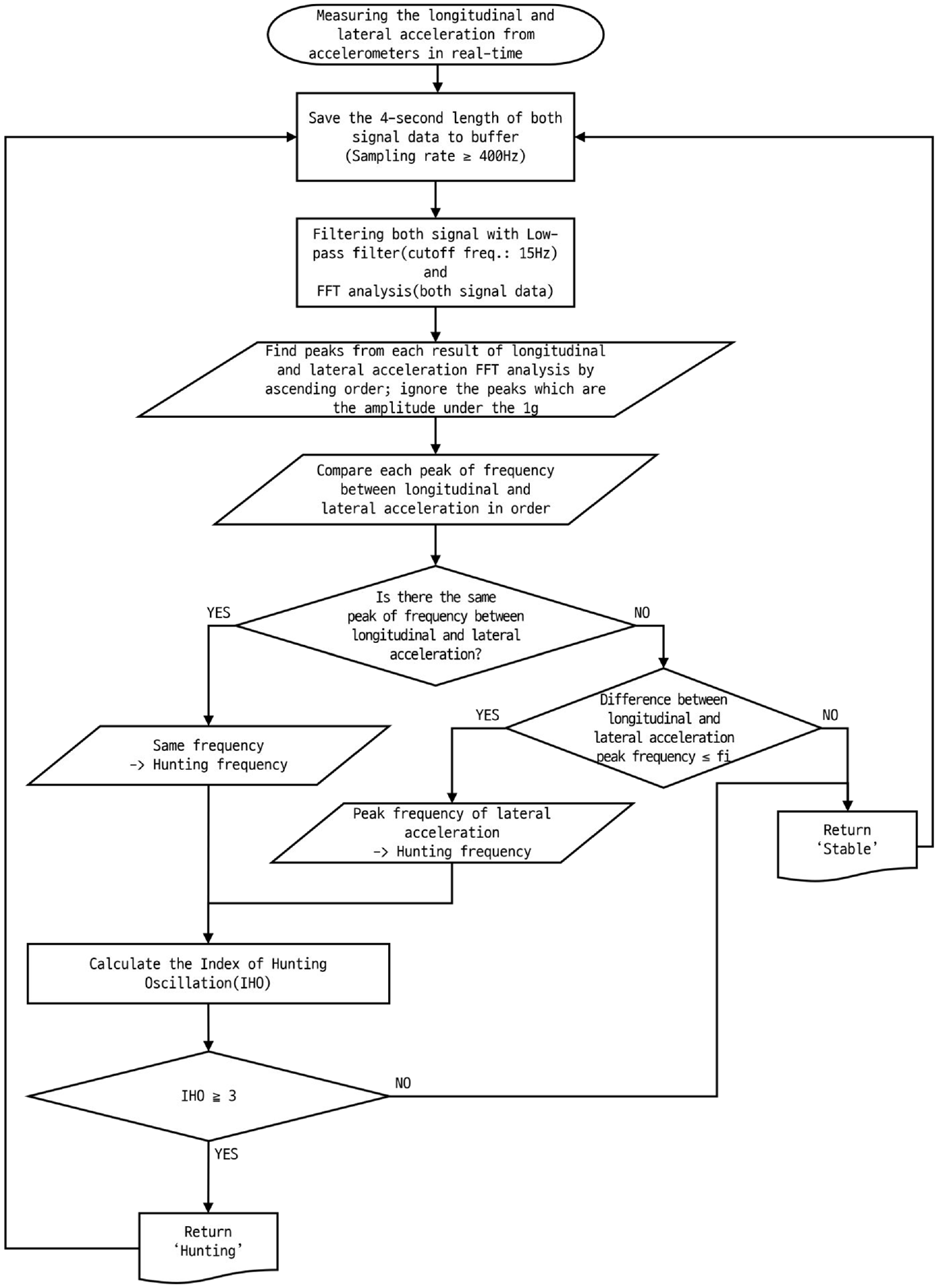
Flow chart of the hunting detection algorithm.

Flow chart for calculating the IHO.
Validation of hunting detection algorithm
Validation using dynamic simulation
To validate the bogie hunting detection algorithm developed in section “Development of detection algorithm for bogie hunting oscillation” simulation was carried out. For simulation, the railway vehicle model was written by multi-body dynamics software called SIMPACK 23 and the scenario was configured. In this scenario, there are situations in which bogie hunting behavior will be forced to occur, as well as situations where the bogie is stable. Simulations were conducted to verify whether the proposed algorithm accurately detects “Hunting” in sections where bogie hunting occurs, and correctly identifies sections where the bogie runs stably as “Normal.”
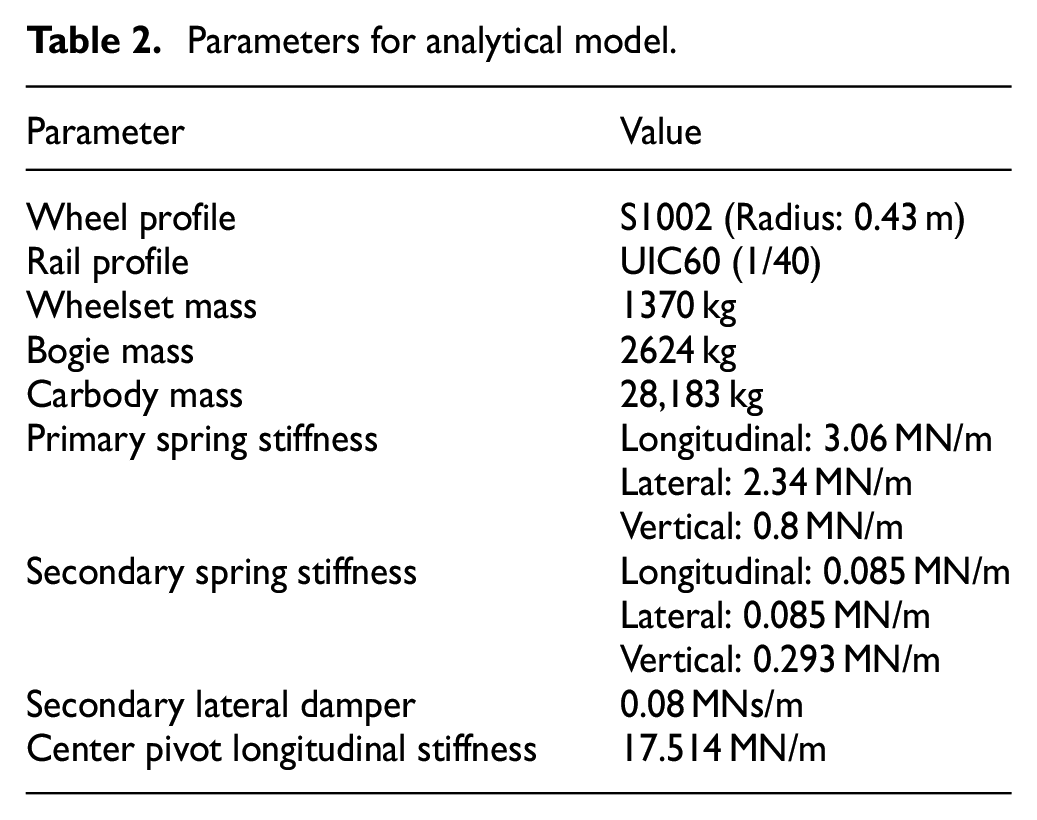
The model of the railway vehicle was created based on a single car, and the parameters for the model are shown in Table 2. The simulation model configured using SIMPACK software is shown in Figure 6. In the simulation, track irregularity shown in Figure 7 was generated using predefined PSDs in the SIMPACK software, which are defined in ERRI B176 24 and include horizontal, vertical, and cross-level directions.
Parameters for analytical model.

Simulation model of single railway vehicle.

Track irregularity for simulation.
The critical speed of the vehicle model for simulation is 150 km/h. The vehicle was driven according to the speed profile depicted in Figure 8(a), accelerating up to 153 km/h, which exceeds the threshold speed, and maintained this speed for approximately 20 s. Then, it decelerated to 110 km/h and maintained that speed for 20 s before decelerating again to 75 km/h. As shown in Figure 8(b), which represents the lateral acceleration at the Center of Gravity of bogie, bogie hunting occurs while driving at 153 and 110 km/h, but it completely disappears at 75 km/h. During the simulation, accelerometers were attached to the end of the bogie frame, as shown in Figure 2, to measure the longitudinal and lateral accelerations while driving. The time history results of accelerations measured from accelerometers are depicted in Figure 8(c). Bogie hunting behavior begins approximately at 52 s, with the amplitude slightly decreasing around 85 s and completely disappearing around 117 s. The frequency analysis results and peak detection results of the lateral and longitudinal acceleration from 52 to 56 s are shown in Figure 9. Through the detection algorithm, it was determined that the hunting frequency is 4.50 Hz, with a 2× harmonic at 9.00 Hz and a 3× harmonic at 13.74 Hz in longitudinal acceleration. Only the hunting frequency and 3× harmonic were observed in lateral acceleration. Also, the maximum value of accelerations exceeds 10 m/s2. Consequently, the IHO was calculated to be 4 points, indicating that hunting oscillation occurs.

Time history data of simulation for validating hunting detection algorithm: (a) speed profile, (b) lateral acceleration measured at bogie’s COG, and (c) lateral and longitudinal acceleration measured at accelerometer.
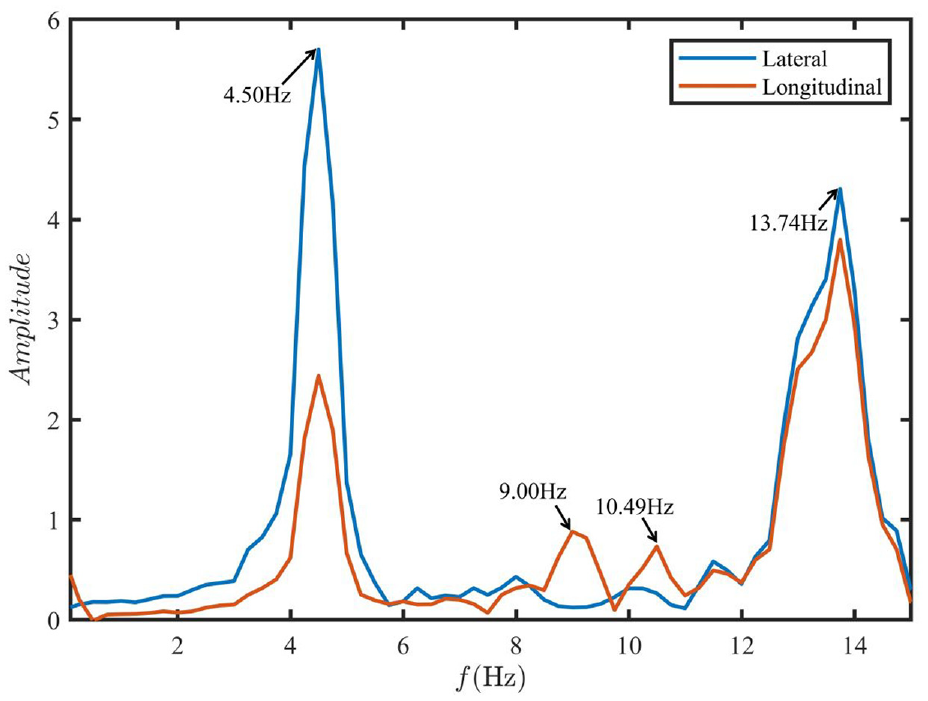
The results of FFT analysis and peak detection for lateral and longitudinal acceleration in simulation.
The bogie hunting detection algorithm was applied to the 140-s acceleration data from the simulation, and the results of the algorithm were graphed every second from 4 s after the start, as shown in Figure 10. If the IHO exceeds 3 points, it is considered as hunting, so the area above 2.5 was marked as the hunting occurrence area, and the rest was indicated as a stable area. It was observed that hunting behavior was well detected from 52 s after its occurrence until it completely disappeared at 117 s. Despite the small amplitude of hunting between 85 and 117 s, the detection algorithm was still operating effectively, which is a very promising result. The hunting detection algorithm determined that hunting was detected even though it did not occur in some sections (from 0 to 51 s and from 118 to 140 s). Additionally, the algorithm determined that hunting did not occur even though it actually did. Therefore, the accuracy of detecting hunting behavior in the entire dataset was confirmed to be approximately 90%.
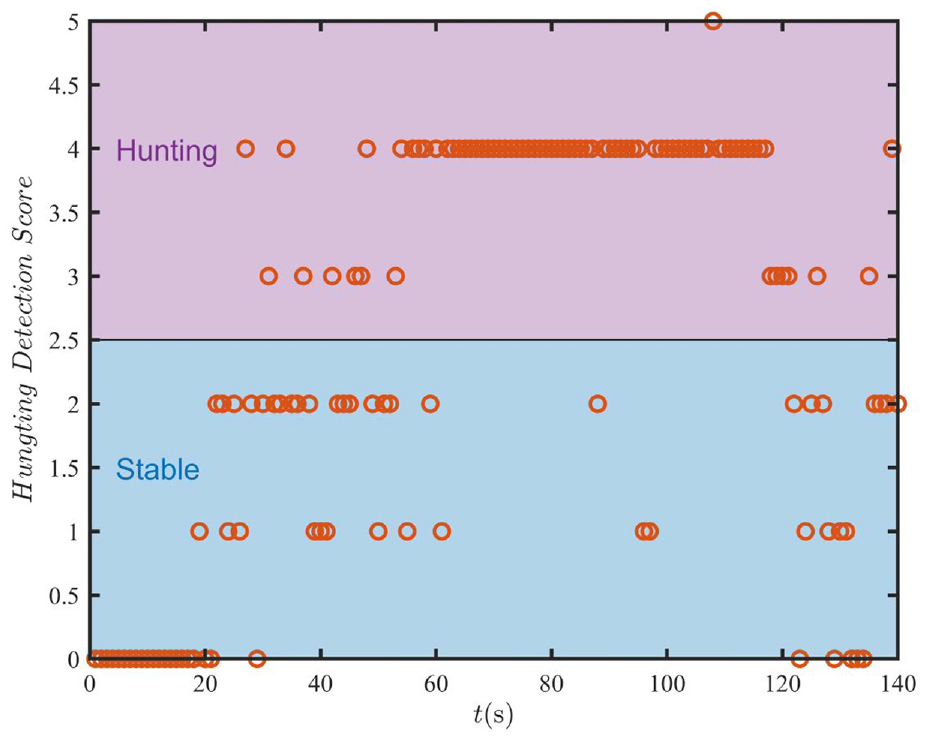
The results of hunting detection algorithm for simulation dataset.
Validation using experimental results
In Section “Validation using dynamic simulation”, simulations confirmed that the hunting detection algorithm has a discrimination accuracy of over 90%. To evaluate the practical applicability of the algorithm, experiments were conducted using an actual railway vehicle as well. The Roller Rig Test equipment shown in Figure 11 was utilized for these experiments. 25 This equipment, owned by the Korea Railroad Research Institute, is used to verify the dynamic characteristics of bogies and validate critical speeds. During the experiment, displacement sensors (Linear Variable Differential Transducers) were installed to measure the lateral displacement of the bogie. Accelerometers for measuring lateral and longitudinal accelerations, necessary for implementing the hunting detection algorithm, were installed on the top of the bogie frame above the left front axle box.

Roller rig test equipment.
The two experiments involved gradually increasing the driving speed using roller rig test equipment until bogie hunting occurred, then decelerating until the hunting completely ceased, while measuring the data throughout. Two different experimental setups were used to validate the hunting detection algorithm.
In the first setup, bogie hunting began when the driving speed reached 288 km/h, stabilizing after decelerating to 230 km/h. Figure 12(a) displays the speed profile during the experiment. The lateral displacement of the bogie, depicted in Figure 12(b), shows a rapid onset of hunting around 20 s, disappearing completely around 200 s. Lateral and longitudinal accelerations measured from the accelerometer attached to the bogie are shown in Figure 12(c).

Time history data of the first experiment: (a) speed profile, (b) lateral displacement of bogie frame measured at axle position, and (c) lateral and longitudinal acceleration measured at accelerometer.
The frequency analysis and peak detection results of lateral and longitudinal acceleration from 20 to 24 s are presented in Figure 13. Through the detection algorithm, it was determined that the hunting frequency is 3.25 Hz, with 2× harmonic at 6.50 Hz and 3× harmonic at 9.75 Hz in longitudinal acceleration. Only the hunting frequency and 2× harmonic were observed in lateral acceleration. Additionally, the maximum acceleration did not exceed 10 m/s2. Therefore, an Index of Hunting Oscillation (IHO) of 3 points was calculated, indicating hunting oscillation. Examining Figure 12(b), the lateral displacement graph of the bogie clearly shows bogie hunting from around 20 s onward. Despite the bogie’s lateral acceleration peaking at only 3 m/s2, making hunting behavior difficult to discern based solely on acceleration magnitude, the algorithm proposed in this study effectively detects even minor hunting behavior with small amplitudes.

The results of FFT analysis and peak detection for lateral and longitudinal acceleration in the first experiment.
The bogie hunting detection algorithm was applied to 220 s of acceleration data from the simulation, with results graphed every second from 4 s after the start, as shown in Figure 14. Hunting behavior was well detected from 20 s after its onset until it completely disappeared at 200 s. Despite the small amplitude of hunting throughout the entire experiment, the detection algorithm consistently operated effectively. The accuracy of detecting hunting behavior in the entire dataset was confirmed to be approximately 81%.

The results of hunting detection algorithm for the first experiment dataset.
In the second experimental setup, different suspension settings for the bogie were considered. Bogie hunting occurred when the driving speed reached 200 km/h, and stability was achieved after decelerating to 110 km/h. Figure 15(a) shows the speed profile during the experiment. The lateral displacement of the bogie, depicted in Figure 15(b), exhibits a rapid onset of hunting around 10 s, which completely disappears around 250 s. The lateral and longitudinal accelerations measured from the accelerometer attached to the bogie are shown in Figure 15(c).

Time history data of the second experiment: (a) speed profile, (b) lateral displacement of bogie frame measured at axle position, and (c) lateral and longitudinal acceleration measured at accelerometer.
The frequency analysis and peak detection results of the lateral and longitudinal accelerations from 22 to 26 s are shown in Figure 16. Through the detection algorithm, it was determined that the hunting frequency is 3.50 Hz, with 2× harmonic at 7.00 Hz and 3× harmonic at 10.75 Hz in longitudinal acceleration. Additionally, the hunting frequency, 2× harmonic, and 3× harmonic are observed in lateral acceleration. The maximum value of accelerations does not exceed 10 m/s2. Therefore, the Index of Hunting Oscillation (IHO) is calculated to be 4 points, indicating that hunting oscillation occurs. Looking at Figure 15(b), which depicts the lateral displacement graph of the bogie, it is evident that bogie hunting begins clearly around 10 s. Despite the maximum lateral acceleration of the bogie not exceeding 8 m/s2, the algorithm proposed in this study is capable of detecting hunting behavior with relatively small amplitudes.

The results of FFT analysis and peak detection for lateral and longitudinal acceleration in the second experiment.
The bogie hunting detection algorithm was applied to the 275-s acceleration data from the simulation, and the results of the algorithm were graphed every second from 4 s after the start, as shown in Figure 17. It was observed that hunting behavior was well detected from 10 s after its occurrence until it completely disappeared at 250 s. The accuracy of detecting hunting behavior in the entire dataset was confirmed to be approximately 85%.

The results of hunting detection algorithm for the second experiment dataset.
Conclusions
In this study, an algorithm for detecting bogie hunting oscillation in railway vehicles was developed and verified both analytically and experimentally. The algorithm utilizes signals measured from longitudinal and lateral accelerations at the top of the bogie frame, above the front left axle box, based on the geometric characteristics observed during bogie hunting. The developed algorithm identifies the hunting frequency through FFT analysis and peak detection results of the longitudinal and lateral acceleration data. It determines the presence of hunting oscillation by detecting harmonic terms of the hunting frequency in the acceleration analysis results.
To validate the algorithm, a general railway vehicle analysis model was constructed, and simulations were conducted under scenarios where bogie hunting occurs. The simulation results were analyzed to verify the algorithm’s effectiveness. Additionally, for practical validation, the algorithm’s performance was tested using acceleration data collected during actual bogie hunting occurrences in dynamic tests (Roller rig tests). The verification through simulations and experiments indicated an average hunting detection accuracy of approximately 85%.
Although the average accuracy of other works is about 98%, which is higher than that of the proposed algorithm, they have very high complexity and computational costs or require multiple sensors. In contrast, the bogie hunting detection algorithm developed in this study offers the advantage of using only accelerometers and involves relatively low computational costs. Moreover, despite the challenge of detecting hunting behavior when the bogie’s lateral acceleration is relatively small, the proposed algorithm demonstrates the capability to detect bogie hunting with minor amplitudes, facilitating quicker identification of bogie instability.
In future work, there is a plan to improve the performance of the hunting detection algorithm. Additional vehicle models will be considered in simulations, and the algorithm will be refined to enhance its accuracy. Furthermore, tests to evaluate the effectiveness of the hunting detection algorithm are scheduled to be conducted with railway vehicles rather than roller rig tests. Since hunting behavior is rarely observed in regular operations, testing with railway vehicles to validate the proposed algorithm requires a long-term plan to collect data and observe hunting behaviors. Through these processes, the practical effectiveness of the hunting detection algorithm will be validated.
Footnotes
Handling Editor: Piotr Koziol
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by a grant from the R&D Program (Development of core technologies for the capsule-type K-500 bogie, PK2403B3) of the Korea Railroad Research Institute.