
Abstract
The unmatched perturbation of load torque is the essential problem in the Electrical Vehicle (EV) based DC motor which requires deep control concern for solution. In this study, the proposed solution to such a control problem is to design three observer-backstepping control schemes for speed trajectory tracking of EVs. The backstepping control algorithm has been developed based on three observers: Adaptive Disturbance Estimator (ADE), Nonlinear Disturbance Observer (NDO), and Quasi-Sliding Mode disturbance Observer (QSMO). Based on Lyapunov stability analysis, the ultimate boundedness of proposed controllers has been detailedly analyzed, assessed, and evaluated in the presence of unmatched perturbation. In the case of backstepping control based on ADE, the stability analysis has been conducted in the presence of stationary and time-varying disturbances to take into account the real load at the EV system. Moreover, a novel mathematical analysis has been conducted to determine the ultimate bound of disturbance estimation error in the case of backstepping based on QSMO. For the NDO-based backstepping controller, the design has been developed by proposing a new structure of nonlinear disturbance observer. The evaluation of proposed controllers has been verified with numerical simulations.
Keywords
Introduction
In order to ensure the reduction of fossil fuels and to account clean climate, engines of internal combustion are replaced by electric drive engines in most life requirements. The technology of Electric Vehicles (EV) is a suitable and efficient solution due to its reliability and sustainability. In general, to actuate electric vehicles, different types of electric motors can be used like DC motors, synchronous motors, induction motors, and reluctance motors. 1 Due to its simplicity, ease of manufacturing, and maintenance, the DC motor is a suitable choice for most EV applications. 2 The weight of passengers and the disturbances due to bumpy roads are the potential uncertainties encountering the speed control of EVs. In spite that the model of the DC motor is easy to develop, the presence of unmatched perturbation represents a challenging problem when evaluating the performance of robust controllers in terms of load torque. 1 To tackle the uncertainty problem, one may use the disturbance estimation together with the proposed controller to compensate for the mismatched perturbation as a hard solution. The other solution is to design a control law that can only reduce the effect of perturbation. However, the assessment of the proposed control solution depends on how it can reduce the ultimate bound of convergence error. 2 Accordingly, many control strategies have been devoted to solve this control problem and mitigating the effects of mismatched disturbances such as high-order sliding mode controllers and approximated sliding mode controllers such as by using disturbance observers, and adaptive estimators. 3
The Backstepping controller (BS) is a nonlinear control tool that belongs to the control theory. The BS algorithm adopts the strict feedback class of systems to deal with. Thus it is employed in various situations of complex nonlinear dynamic systems. The main feature of the BS algorithm is to subdivide the system into sub-systems and to convert the whole control objective into a series of simpler, interconnected control tasks by stepping back through these channels. Using such an iterative design of virtual controllers for each channel, made the BS algorithm be suitable approach for stabilizing nonlinear strict-feedback form systems and applied in a wide range of applications. 4 However, the robustness characteristics of the BS algorithm against uncertainty or perturbations are still premature and a point of attraction for many control researchers.
In the nonlinear systems analysis, perturbations represent an inherent phenomenon of physical systems. It can be divided into sets and groups according to their impact and effects on the nonlinear systems. Vanishing perturbations are the perturbations that vanish in the equilibrium set while the non-vanishing perturbations affect the equilibrium. 5 Also, the matched perturbations are characterized by their impact on controller column space, opposite to the unmatched (mismatched) perturbations where their impact lies in the controller null space. For the systems subjected to perturbation, the hardest situation is the unmatched non-vanishing perturbation, where the best result can be got is the uniform ultimate boundedness. In this sense, the competition of controllers is based on how well one can give the least ultimate bound. 4
Disturbance observers represent an advanced level of control theory. Extending the overall system dynamics gives the ability to the disturbance observer to estimate the perturbation (disturbance). 6 According to the adopted technique, convergence of the estimated perturbation to the real one will judge the reliability and rigidness of the observer. Adaptive disturbance estimation has been proposed firstly as an extension of the model reference adaptive control which consists of the reference model as the observer dynamics and the adaptive law as an auxiliary dynamics.7,8 The nonlinear disturbance observer uses the Luenberger observer estimation term for the observer to estimate the perturbation. 9 Another variable structure control disturbance observer based on is Sliding Mode disturbance Observer (SMO), considered a brilliant concept to estimate the system variables or perturbations robustly. The main feature of such observer is the sliding variable that possesses a unity relative degree with respect to the observer injection term. The observation mechanism consists of two phases: the reaching and the sliding phases. The observer forces the sliding variable to converge to zero from any initial condition in the reaching phase. While, for the sliding phase, the disturbance estimation error converges to zero asymptotically. 10 Due to injection term discontinuity, the disturbance estimation will be corrupted with chattering. One of the treatments to rid of this chattering is to use a low pass filter. 11 Furthermore, the chattering in the injection term which will represent the disturbance estimation prevents employing the injection term in the backstepping virtual control due to the impossibility of tracking high-frequency components of the disturbance estimation. 12 However, for backstepping-based SMO a chattering free of disturbance estimation is required. Thus, the hyperbolic (tanh) function is used instead of the signum function.13,14
Backstepping enhancements to tackle the mismatched perturbations become a priority in the nonlinear control theory community.
15
Achievements in that field are represented by fusing estimating techniques to the virtual controller of the backstepping like backstepping-based approximated SMC in Mattei and Monaco
16
and extended observer-based backstepping in Rashad et al.
17
other contributions consist of a higher-order SMC direct compensation like mixed
The following recent works, relevant to the scope of the paper, are briefly highlighted here. A nonlinear integral controller is proposed for DC motors affected by an external load, the integral term is considered as a saturation error function to gain robust properties against the external torque in Al-Samarraie et al. 24 A backstepping based on the nonlinear PI controller is used as for the DC motor in AL-Samarraie and Abbas 25 DC motor speed control with load torque is considered in Humaidi et al. 26 with robust MRAC is designed and tested. An optimized PID controller is considered for the DC motor in Ekinci et al. 27 where a heuristic optimization algorithm named Harris Hawk’s Optimization (HHO) algorithm is adopted. Speed control of a Brushed DC motor is implemented with the manually tuned PID control algorithm in Hammoodi et al. 28 Fixed point induction and zero average dynamics and controllers driving a Buck converter to DC motor speed control are designed in Hoyos et al. 29 Fuzzy controllers-based genetic algorithm optimization was considered for the DC motors in Lotfy et al. 30 Robust tracking performance and regulatory effective control for a brushed DC motor are designed and assessed based on active disturbance reduction control based on linear extended observer. 31 Trajectory tracking of rotor angular velocity for converter-fed system DC motor with load torque is designed using a continuous non-singular terminal sliding mode control. 32 Adaptive law-based backstepping cooperated with integral sliding mode control to the angular speed control of DC motor with external load are assessed in Afifa et al. 33 A comparative control analysis of P, PI, and PID is conducted in Barkas et al. 34 Velocity trajectory tracking of DC motor based on hierarchical flatness control has been addressed in Roldán-Caballero et al. 35 Fractional order PID tuning and design for Electric vehicle drive based on DC motor has been designed and tuned in Patil et al. 36
It is worthy to mention that the DC motor actuator is the core of the EV and the load changes due to physical conditions are all lumped into the unmatched uncertainties within its dynamic model. The motivation for this paper is how to propose a control scheme that can solve the speed control presence of unmatched uncertainties due to real conditions of EV motion. 37 Enriching this study with complex, nonlinear, adaptive, and variable structure control theories could significantly enhance the performance of EVs under different environmental conditions.38–40
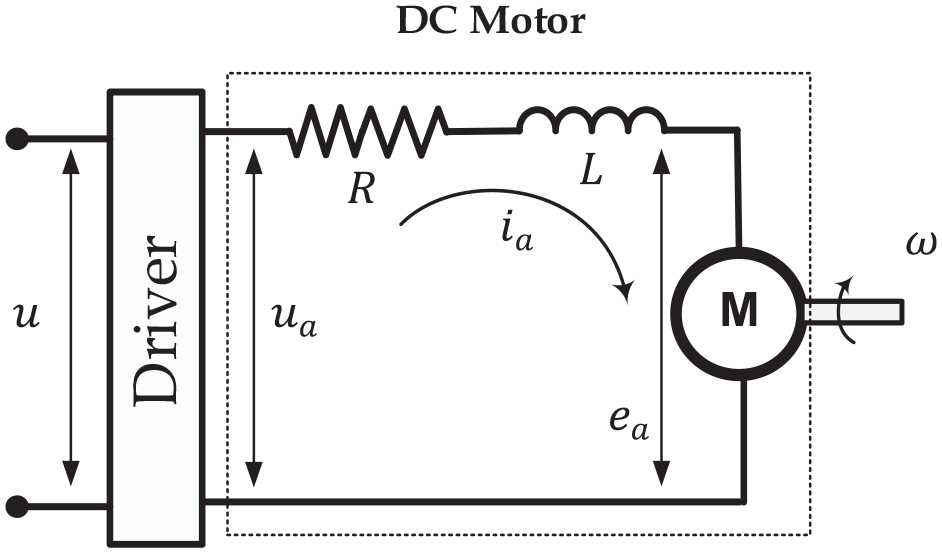
In this work, the problem of speed trajectory tracking control for EV DC-drive systems subjected to unmatched load torque will be addressed and assessed based on disturbance-based backstepping control methodologies. Three observer-based backstepping control schemes have been proposed, represented by a Backstepping controller based on Adaptive Disturbance Estimator (BS-ADE), Backstepping controller based Nonlinear Disturbance Observer-based (BS-NDO), and Backstepping controller based Quasi-Sliding Mode disturbance Observer (BS-QSMO). The design and stability analysis has been developed to ensure the ultimate boundedness of tracking and estimation convergence errors. In addition to the conventional backstepping control algorithm, the proposed observer-based controllers have been compared in terms of tracking and estimation convergence errors. The main challenging task of these controllers is how to manage the unmatched disturbance in the framework of backstepping control. Figure 1 presents the schematic configuration of the proposed backstepping controller based on the three disturbance observers for the EV based on the DC drive control system.

The proposed observer-based backstepping control schemes.
The main contribution of this paper is to design a backstepping control algorithm based on three various disturbance observers to achieve speed trajectory tracking control for EVs based on a DC motor drive system in the presence of unmatched load torque. Therefore, one can elaborate the main contribution into the following control tasks:
Development of a Backstepping control algorithm based on an Adaptive Disturbance Estimator (BS-ADE) using Lyapunov-based stability analysis in case of slow-varying (stationary) and time-varying disturbances. The latter case has been firstly analyzed, discussed, and verified and it is an important contributing point of this study.
Development of backstepping based on quasi-sliding mode disturbance observer (BS-QSMO) using Lyapunov stability. The contribution key of this part is conducting a novel mathematical analysis to determine the ultimate bound of disturbance estimation error.
Development of a backstepping control algorithm based on the proposed nonlinear disturbance observer (BS-NDO) using Lyapunov stability analysis. The proposed structure of NDO and the determination of the region of attraction and ultimate bound is another contributing point in this study,
Conducting a comparison study of the performance among the three proposed observer-based controllers.
The rest of the paper is organized into Section “Control problem formulation,” the control problem formulation and assumptions, Section “Control design,” the Lyapunov stability analysis-based controllers design, the simulation results are discussed in Section “Simulation Results” and finally Section “Conclusions,” which ends with the conclusions.
Control problem formulation
The DC motor is the main part of EV which works to convert the electric energy to mechanical torque and speed. In this paper, a separately-excited armature control DC motor has been applied for vehicle actuation as shown in Figure 2.
DC motor circuit.
According to Newton’s second law and Kirchhoff’s Voltage Law (KVL), the following model can be established 1


where,
It is clear from equations (1) and (2) that the model includes unmatched perturbation (load torque), which is considered a challenging control problem to be addressed in this study. Therefore, the backstepping controller-based disturbance observer is the control objective for the above model to make the angular speed
The system of equations (1) and (2) represents a strict-feedback system and by letting the speed error

Control design
There are many control extensions of the backstepping algorithm that deal with unmatched disturbance. Fusing the observer techniques with the backstepping control could effectively tackle the unmatched problem, which motivated a rapid rise of observer-based backstepping control theory. In what follows, the backstepping control design based on three versions of observers will be analyzed in details for the DC drive system under unmatched disturbance (load torque).
Backstepping
A virtual controller for the unperturbed system of equation (3) can be designed as:

Using a Lyapunov candidate for the unperturbed individual channel of equation (3), and

or,

The error

The

By defining a total Lyapunov function of,

Taking the time derivative of

Let the lumped perturbations represented as

Using equation (11), equation (10) becomes
Let


Referring to Khalil 4 (Theorem 4.18 and Lemma 9.2), the ultimate bound is

where

Equation (16) represents the challenge of this paper. Despite that the backstepping controller could stabilize the system of equation (3) separately, certain terms are required to do this properly. Hence, the ultimate bound that the backstepping controller (mathematically) can provide depends on the upper bound of
Backstepping control based on adaptive disturbance estimator (BS-ADE)
Including the unmatched perturbation estimation in the virtual controller of the backstepping is the key feature for robustness enhancement of the backstepping controller. Nevertheless, the perturbation upper bound is not a prerequisite for the adaptive estimator. To proceed, two cases of the perturbation will be considered:
Case I: Slow varying perturbation
An important assumption has to be strictly followed
The assumption of
A virtual controller is assigned to the upper sub-system of equation (3)

where estimation of the disturbance is represented by

Where the disturbance estimation error is represented by

The suggested control law can be given by

where,

Thereafter,

A Lyapunov function consisting estimation error term can be chosen as

where

Using

To ensure

This leads to

Using Barbalat’s Lemma,
41
the asymptotic convergence of
Case II: Time-varying perturbation
In the case of time-varying perturbation

Again, using the adaptive law of equation (26) and the control law of equations (20), (21), and

Then, a uniform ultimate boundedness of

Let

or,

This yields the following results

Referring to Akhtar and Patil 2 (Theorem 4.18 and Lemma 9.2), the ultimate bound is

Equation (32) represents the ultimate bound of the tracking and disturbance estimation errors which yields a brilliant achievement, in addition to the design parameter
Backstepping controller-based nonlinear disturbance observer (BS-NDO)
Regarding the separation principle in the observer, a design that gives the ability to separate the backstepping controller and the disturbance observer can be achieved. Considering the estimation of mismatched disturbance, the estimates of the designed observer will be used to synthesize the virtual controller of the backstepping control algorithm and this is the improvement key in the backstepping control based on nonlinear disturbance observer (BS-NDO). In this part of the observer-based controller, the assumption of Case I in the previous section will be pursued.
The following observer is proposed

Defining the estimation error as

Choosing

Following the previous analysis (equations (17)–(19)), the error dynamics for


The control law can be chosen to be expressed in terms of its components as,

where,

Equation (37) can be rewritten as

Let

The following observer for

where

Since

This indicates the asymptotic stability of dynamics. The control part

Taking the time derivative of Lyapunov candidate

or,

where
Letting

or,

Referring to Akhtar and Patil 2 Lemma (9.2), Theorem (4.18) then the bound is

The ultimate bound dependency of equation (49) is related to the disturbance estimation error representing a considerable achievement.
Backstepping control based on quasi-sliding mode disturbance observer
In this part, two sub-observers are designed: one for the system channel of equation (1) to account for unmatched disturbance, while the design of the other observer is devoted to cope with the projection of lumped disturbance to the second channel. Firstly, the observer of the first channel is designed based on equation (1)

The estimation error is defined by

Selecting

where


where,

Then,

letting

The proposed structure for the second sub-observer can be proposed as

Let

One can establish the reaching condition as follows:

where

Using equation (9), then

The estimation error ultimate bound of the


Since

To ensure

Similarly, for the

Accordingly, the uniform ultimate boundedness can be guaranteed for

where

Then, according to Lemma (9.2) and Theorem (4.18) of Khalil, 4 the ultimate bound can be finally established

The ultimate bound of equation (70) represents the new contribution achieved in this study, the ultimate bound is related to the disturbance estimation error, which in turn relies on the upper bound of differentiable disturbance. That bound is minimized by decreasing the parameters
Simulation results
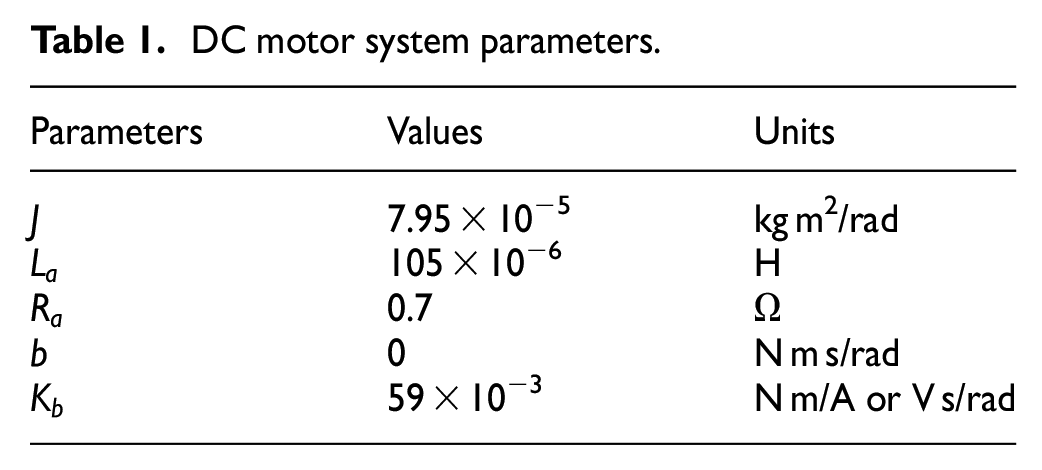
The verification of proposed disturbance-based controllers for the DC motor system has been made based on numerical simulation using MATLAB according to the operating region of EV system as in Lin et al. 37 The setting of DC motor parameters used in the simulation results are listed in Table 1.42,43
DC motor system parameters.
The desired speed trajectory which represents a commanded speed by pressing the accelerator pedal to multi-speed levels which can be described as follows

The load torque represents the traction load either due to changes in passengers’ weight, road terrains, road bumps, changes of the center of gravity (COG) for EV, or the friction changes caused by slippery roads.
37
Considering a shifted sinusoidal signal as:
Figure 3 shows the state

The behavior of

The behavior of
Performance and robustness characteristics.

Figure 5 shows the behaviors of control actions due to proposed observer-based controllers. It is evident that the controlled system based on BS-ADE has the highest initial control effort as compared to other controllers due to that adaptive law initial condition while in NDO and QSMO the observers guaranteed the disturbance estimation from

Control action
Figure 6 shows the tracking error

Armature current error
Figure 7 shows the responses of armature currents, represented by state variable

The behavior of
Figure 8 shows the errors of the state estimation of both BS-QSMO and BS-NDO where it is obvious that the BS-QSMO controller has less estimation error than BS-NDO. Figure 9 shows the actual load torque and its estimates resulting from observers. One can see that all observers are capable of estimating the load torque with considerably small errors. Due to the adaptive law inherited in the mechanism of controller BS-ADE, more time is required for this controller to give acceptable estimation performance. Figure 10 represents the estimation error between the actual load torque
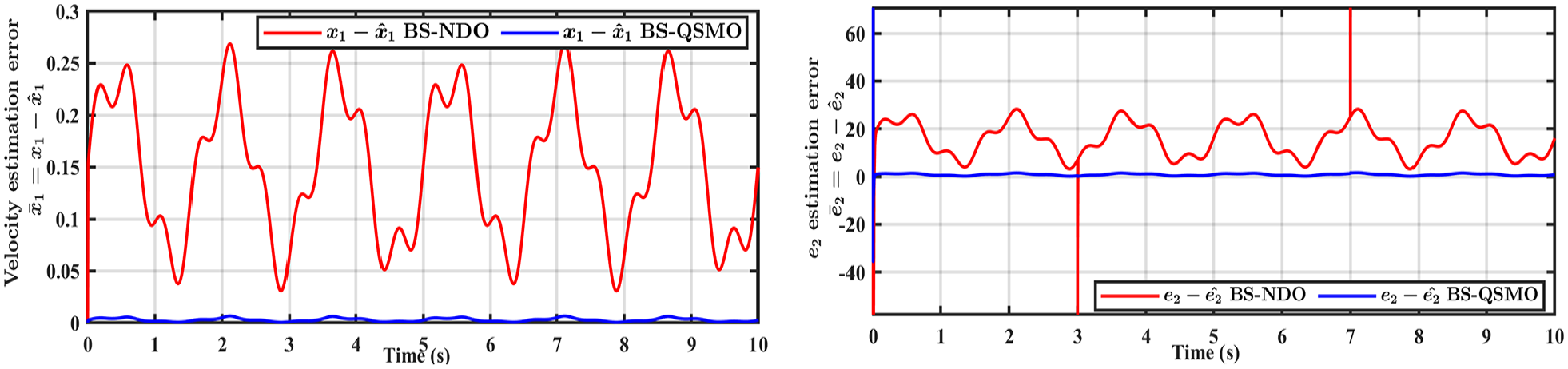
State estimation

The behaviors of actual torque

The estimation errors (
Conclusions
This study has addressed the problem of ultimate boundedness for DC-actuated electrical vehicle system in the presence of unmatched disturbance (torque). The backstepping control based on three different disturbance observers has been proposed. A rigorous stability analysis and design have been presented and developed based on the Lyapunov theorem to establish robust observer-based backstepping controllers under unmatched load disturbance. In terms of transient characteristics, the BS-ADE showed the highest peak overshoot with the fastest response as compared to other controllers. However, the lowest convergence tracking error is given by BS-QSMO, while BS-ADE gives the highest ultimate bound of convergence error. In terms of control effort, the controlled system based on BS-ADE has the highest initial control effort as compared to other controllers. On the other hand, the initial efforts based on all controllers have low and reasonable values to be applied in the real control environment. The numerical simulation showed that the state variable
Footnotes
Handling Editor: Xiaodong Sun
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.