
Abstract
The service life and efficiency of proton exchange membrane fuel cells (PEMFCs) are significantly related to the control performance of the air supply system. Therefore, this research develops a novel robust observer-based-
Keywords
Introduction
With the growing environmental challenges created by traditional fuels, fuel cells have recently received much attention. A proton exchange membrane fuel cell (PEMFC) is an emerging renewable energy source that show great potential in reducing emissions. Due to its promising characteristics, it is considered for further development.1–3 Moreover, the PEMFC plant is capable of being one of the most popular innovative technologies replacing conventional internal combustion engines. It is ideal for ground vehicles because of its advantages, such as fast startup, low operating temperature, low operating noise, small volume, and zero carbon dioxide emission.4,5
An automotive PEMFC plant mainly includes an air (oxidant) supply subsystem, hydrogen (fuel) supply subsystem, humidification/thermal management subsystem, fuel cell stack, and balance of plant (BOP) control unit.6–8 To achieve optimal performance and safe operation, it is critical to keep good cooperation among subsystems via the control system of the BOP to provide suitable conditions such as pressure, flow rate, temperature, and humidity for the electrochemical reaction inside the PEMFC system. However, the reaction performance, output efficiency, and the PEMFC stack’s lifetime are significantly influenced by the air supply subsystem, which provides the necessary compressed air to the cathode channel of the PEMFC stack under operating conditions and time-varying load current. 9 In particular, when the current load changes abruptly during the PEMFC system operation, the compressed air in the cathode channel of the PEMFC stack will be rapidly consumed to fulfill the power requirements. On the one hand, if the air compressor is unable to react immediately to rapid current load changes via the control unit to provide enough oxygen, the stack cathode will suffer from the well-known phenomenon of so-called oxygen starvation, which leads to undesirable voltage drops and may cause physical and thermal harm to the PEMFC system. 10 On the other hand, a larger amount of oxygen may result in “oxygen saturation,” which will inevitably increase the air compressor’s parasitic power, even up to 30% of the PEMFC stack power.8,11 Furthermore, the performance of the PEMFC stack will also deteriorate due to membrane dehydration and increased membrane impedance. 12 It is well-known that the oxygen excess ratio (OER) assesses the sufficiency of air feeding. Therefore, the OER must be maintained within/to its desired range/value via effective control under various operating conditions.
In the recent two decades, various control schemes have been widely proposed for the PEMFC air-feeding system. The most significant framework in the early stage is common model-based control methods. Pukrushpan et al. 13 proposed a linear quadratic regulator (LGR) for a 75 kW PEMFC system model to control the desired OER value. a proportional-integral-derivative (PID) controller is presented based on a linearized model established at an obtained equilibrium point. 14 In addition, a feedback linearization method-based-optimal control theory framework is proposed by Chen et al. 15 Similarly, a feedforward combined with an LQR feedback control approach is developed.16,17 Unfortunately, in practical applications, the precise identification of the structure and parameters of the PEMFC system mode is often challenging due to the time-varying disturbances, strong nonlinearity, and high uncertainties. Consequently, methods that heavily rely on high-accuracy plant models are unlikely to ensure the most efficient global regulation of OER. Considering the nonlinearities and dynamic characteristics of the air supply subsystem, nonlinear model predictive control is developed, 18 which can effectively address the nonlinearities and operating constraints; however, the fast solution of optimization issues adds some extra challenges in practice. Moreover, some researchers switched to intelligent modeling-based-control approaches to avoid the high dependence on precise system models. For example, fuzzy logic systems19,20 and radial basis function neural networks21,22 have been developed to online estimate the unmolded or uncertain dynamics of the PEMFC air supply system, laying the foundation for the effective control of OER regulation. Moreover, fuzzy rules are formulated to automatically tune the coefficients of the PID controller to improve the adaptability of intricate operating conditions. 4 Nevertheless, there is a lack of dependable guidelines for offline tuning of fuzzy logic systems/rules, as well as for determining the structure, learning parameters, and selections of neural networks. Consequently, these tasks often rely on the experience and expertise of the engineering developer. It is well known that sliding mode control (SMC) is a robust nonlinear control approach, which has very low sensitivity against uncertainties and disturbances of the controlled system while providing fast response speed and high control precision with a simple structure. Different structures of SMC have been extensively employed in addressing the control problem of OER; for example, a simple SMC of a fifth-order nonlinear PEMFC model 23 and cascaded adaptive SMC8,24 are developed. Although SMC can address nonlinear characteristics and uncertainties, chattering on control variables is usually generated near the equilibrium point under a high feedback gain, leading to system performance deterioration. In this regard, Rakhtala et al. 25 and Pilloni et al. 26 developed a high-order SMC based on a super-twisting algorithm to regulate OER at its pre-defined value. The findings exhibit that the designed controller performs a good effect on the desired OER tracking and disturbance rejection immunity. Similarly, a new variable gain second-order SMC using a super-twisting algorithm is designed to control the air-breathing system of the PEMFC system. 27 The simulation results show that the presented method has the advantages of the fixed gain in terms of robustness against parametric uncertainties, disturbance with the unknown boundary, and chattering reduction. Still, this strategy did not cover all operating conditions of the PEMFC system, such as the cathode pressure, which is an unmeasurable variable in practice. Consequently, how to calculate the OER and design an effective controller to achieve given steady-state and transient responses without intense chattering has hardly been reported. Furthermore, most of the methods mentioned above rely heavily on highly accurate models and are unlikely to ensure the most efficient possible control of OER.
On the other hand, the total pressure inside the cathode channel of the PEMFC stack, which is called cathode pressure (CP), cannot be accurately measured by any advanced sensor, and CP will be used to calculate the OER value; therefore, in practice, it is not a directly available variable. Nevertheless, the most relevant references neglected this fact and assumed that both CP and OER are measurable variables. In order to address such a research problem, various state observers have been proposed to estimate/reconstruct the unmeasured CP and OER, such as Kalman Filters13,28 and Luenberger observer. 29 However, due to high nonlinearity, model uncertainties in fuel cell systems, and requirements of the availability of some dynamic state variables make these observers intricate and sometimes undesirable. Algebraic observers based on numerical differentiation have been proposed,30,31 but these observers are sensitive to measurement noise and can not ensure globally consistent estimation accuracy. Moreover, a high-order sliding mode observer has been proposed for the PEMFC system,25,26 but the solution of the observability matrix requires many calculations due to the complexity and high nonlinearities of PEMFC system as well as how to estimate the second and third order of the output estimation errors is added extra challenge in practical application. Although the existing research provided different degrees of success in estimating unmeasurable state variables and OER control, there are still some limitations and shortcomings.
Fortunately, model-free control (MFC), which only relies on knowledge of input and output information. Therefore, it has been developed gradually to avoid the requirement for obtaining model acknowledgment. Traditional MFCs are widely applied in different fields and offer satisfactory performance with appropriate coefficients. 32 Furthermore, other advanced model-free schemes have received significant attention, such as intelligent PID (iPID),33–36 data-driven model-free adaptive control, 37 iterative learning control, 38 and active disturbance rejection control. 39
Among the different MFCs, iPID based on an ultra-local model has been intensively studied in recent years.1,33–36,40 In order to improve the control performance and ensure the stability of the controlled system, the iPID has been developed and integrated with other methods; for instance, SMC, 1 fractional-order SMC, 41 adaptive fuzzy logic control, 42 and neural network control. 43 However, the robustness of these methods depends on the designed observer/estimator to approximate the unknown lumped uncertainties, such as algebraic observer (AO) 40 and time-delay estimation.42,43 However, due to time delays and time windows, respectively, both the TDE and AO inevitably have approximation errors. Additionally, MFC based on extended state observers (ESOs) is developed.1,41,44–46 The ESO can only achieve asymptotic observation when the time derivative of the unknown uncertain dynamics reaches to zero, the estimation error will converge to zero as time tends to infinity. Therefore, the zero estimation error and finite-time observation of the uncertain system dynamics are not considered in the aforementioned approaches. Thus, the NDOB is the most effective one 47 to estimate the uncertain or unmodeled system dynamics, thanks to its advantages such as simplicity in design structure, a few coefficients, and low sensitivity against disturbances and measurement noise immunity.
Considering the valuable contributions introduced by the studies mentioned above, however, it is notable that most existing methods regarding the OER regulation in the PEMFC system focused on reducing the effect of external disturbance and parameter uncertainties, ignoring the observation of cathode pressure. Thus, this research develops a novel
The main contribution and novelties of the proposed
This study represents the pioneering effort to address the both problems of estimation and control of OER. Different from existing methods,21,22,25,26,30,31 a new NDOB1 is designed for OER reconstruction, aiming to provide high estimation precision and robustness against parameter variations and noise immunity.
To avoid the need for a precise model and simplify the controller design process, the ULM algorithm is utilized to reconstruct the complex nonlinear PEMFC system thanks to MFC theory, wherein the second NDOB2 is proposed to observe the unknown, uncertain system dynamics.
On the basis of the ULM algorithm, the designed NDOB2 and STFOSMC are utilized to calculate the control law of the proposed
In the existing ULM algorithm-based MFCs,1,33,34,40,42,43 the value of
The stability of the proposed
This reminder of this paper can be organized as follows: Problem formulation and dynamic modeling of air supply system are presented in the next section. Then, the design structure of the proposed
Preliminaries and problem formulation
Preliminaries
The definition of the fractional-order can be represented by the general operator structures,

where
The integration of function

where

Thus, the following notations can be utilized for convenience: (i)

In particular, when


where

Problem formulation
The structure of the integrated PEMFC plant, illustrated in Figure 1, is mainly composed of the hydrogen supply sub-system, the air supply sub-system, and the thermal and humidification management sub-system. 6 A high-pressure hydrogen tank stores and supplies hydrogen for the hydrogen supply subsystem, and an electronic valve can rapidly adjust the hydrogen flow into the anode channel of the PEMFC stack to match the airflow. Therefore, hydrogen flow is considered to be sufficient and under control to keep track of the cathode’s air pressure. Furthermore, because the behavior of thermodynamics is significantly slower than the behavior of aerodynamics, the humidity and temperature of the PEMFC system can be regulated independently by local control. In particular, it is assumed that the humidity and temperature of the PEMFC system can operate at the required level because the humidity and temperature values cannot increase or decrease fast. Thus, the main task is concentrated on the air supply system, and it is critical to construct a robust and efficient controller for the air supply system to keep the mass flow rate and partial pressure of oxygen at desired levels on the cathode.

The main subsystems of the PEMFC system.
Dynamic modeling of PEMFC air supply system
In practice, auxiliary components such as an air compressor, an air supply manifold, a cooler, and a humidifier assist the air supply system operate reliably. It is reasonable to assume that other subsystems’ constraint requirements are most likely well-controlled. According to References 5 and 23, the model of the reduced fifth-order nonlinear PEMFC system is presented to describe the dynamic behaviors of airflow, and its state-space representation can be defined as follows:

The state vector
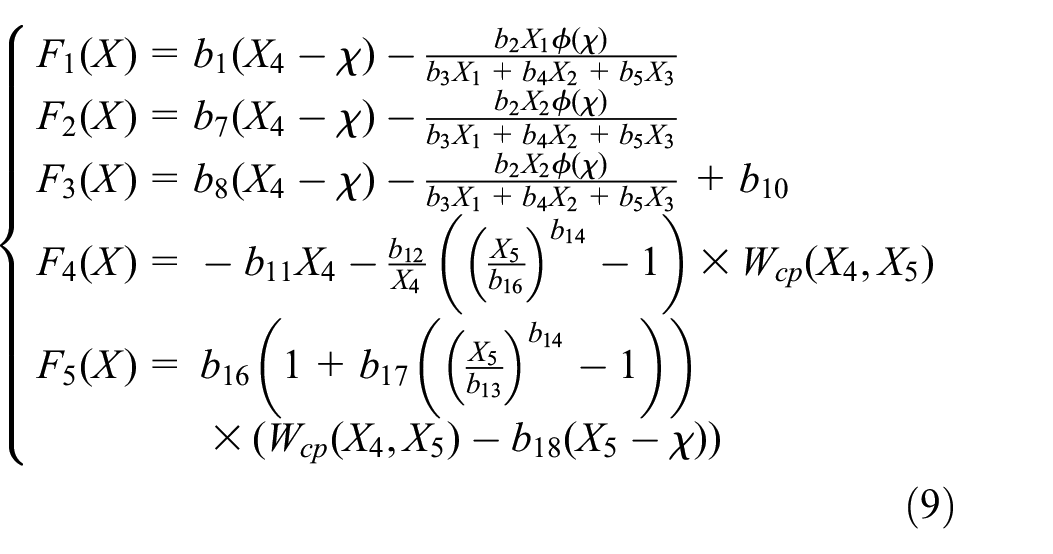
where

and

The constants
Constants of the PEMFC air supply system.

Control objectives
Oxygen excess ratio (OER)

where
OER is a crucial performance variable that indicates the current status of airflow in the PEMFC system. Oxygen starvation in the PEMFC system is typically caused by low OER, whereas high OER can avoid oxygen starvation and enhance the PEMFC system’s efficiency. Unfortunately, high OER will cause the high-speed operation of the air compressor and lead to a reduction in the net power. Consequently, to prevent oxygen starvation and maximize net power, the OER value must be adjusted to its optimal point.
The output net power

where


where
According to equations (13)–(16), it can be concluded that the OER value and the net power are significantly influenced by the magnitude of the load current. The relationship between the output net power and OER value

where the coefficients

(a) Curves for the relationship between output net power and OER at different load currents and (b) fitting curve for the optimal OER and load currents.
Control design
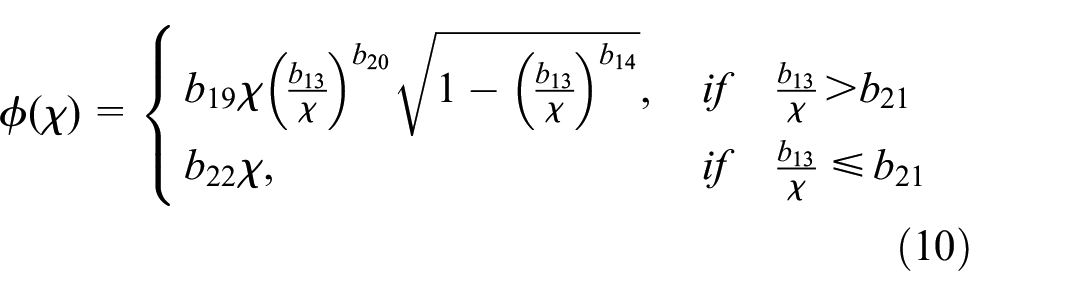
In view of (8), the lack of the cathode pressure, which is difficult to quantify, is the greatest barrier to determining the oxygen excess ratio (OER)
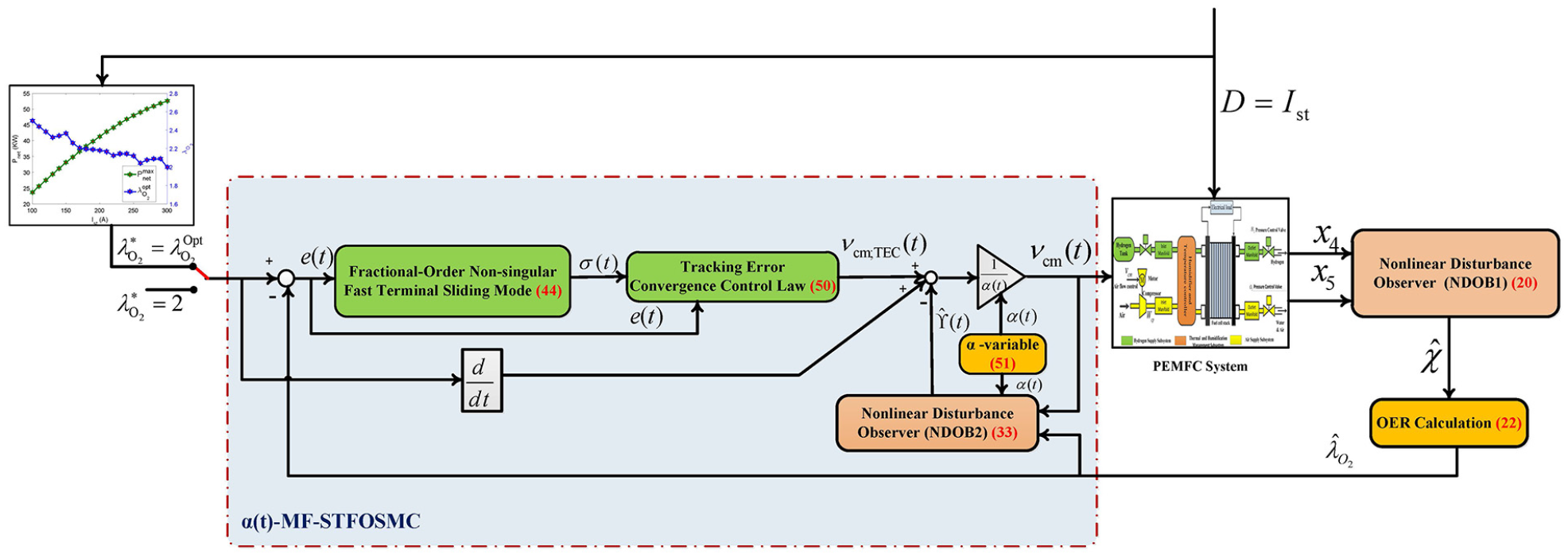
Schematic diagram of proposed
Nonlinear disturbance observer-1 (NDOB1) for estimation of CP and OER
From the view of (8), one has

where
Note that the Assumption 1 is a standard condition widely used for the convergence analysis of NDOB1.
Let’s assume that the estimated value of the unknown function
Next, when differentiating
Therefore, the proposed NDOB1 can be formulated as follows 47 :

Then, by using the proposed NDBO1 (20), the estimated value of

where


Differentiating (23), one can get
According to Lemma 1, the part
Next, by integrating both sides of (25), we obtain:

By simplifying (26), one has

Substituting (23) into (27) yields to:

According to the result that
Observer-based-
-variable model-free super-twisting fractional-order sliding mode control
This part introduces an
NDOB-MF-iPI design
For simplicity’s sake to system with a single control variable

where
Thus, by selecting

where

where
The steady state error can be guaranteed, if the values of
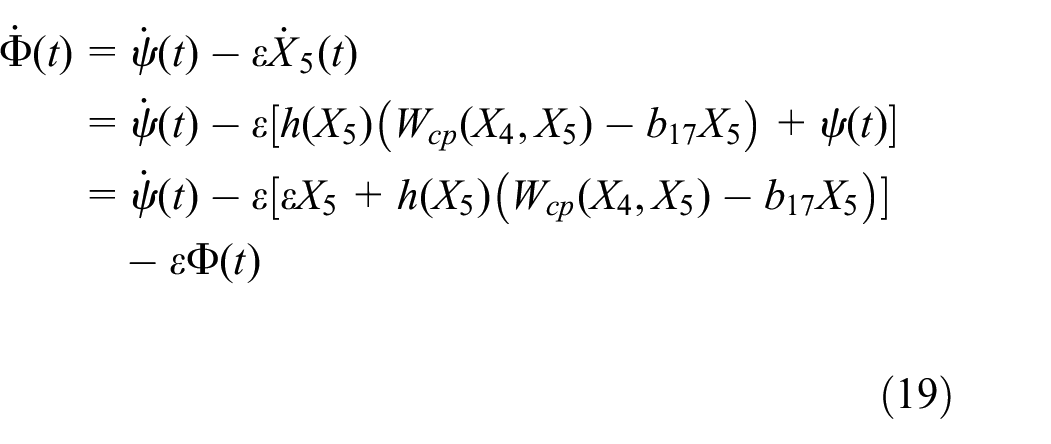
Nonlinear disturbance observer-2 (NDOB2) for estimation of uncertain system dynamics
In this paper, NDOB2 is used to estimate the lumped uncertainties
Assumption 2. There exists a constant
The Assumption 2 is considered to theoretically ensure the existence of the constant
Let’s assume that the estimated value of the unknown system dynamics and its estimation error are defined as
Next, by differentiating

Hence, the suggested NDOB2 can be constructed as bellow 47 :

Then, let’s define the Lyapunov function as:

By differentiating (34), we can get
According to Lemma 1, the part
Next, by integrating both sides of (36), we obtain:

By simplifying (37), we can get

By substituting (34) into (38), one has

According to the result that
-MF-STFOSMC design
According to the ULM principle, (29) can be rewritten as follows

where
Then, the control law of

where
By substituting (41) into (40), a new error equation can be obtained as follows:

Now, new state variables are defined as

In order to achieve finite-time convergence for tracking error with less input chattering, a fractional-order non-singular fast terminal sliding surface is designed as follows:

where

The above proposed switching surface has fast convergence speed and high tracking accuracy. Then, by using ST-FOSMC, the sub-control law

where

Simultaneously, the reaching controller law

where
Correspondingly, from (46) to (48), the tracking error convergence law

Finally, based on NDOB2 (33) and ST-FOSMC law (49), the actual control law of the proposed

In order to further improve the tracking performance of the proposed

where

where
Then, let’s define a new vector as:

Next, the following equation (54) describe the Lyapunov candidate function.

where

where

where
By differentiating the

Based on (52) and (57), one has

with
Then, taking the time derivative of

Substituting (58) into (59), one obtains

with

with
Therefore, the following inequalities (63) and (64) should hold to make


Therefore, the inequality (64) will be satisfied if

It can follow that (63) and (64) will be satisfied if the following inequalities (66) and (67) are satisfied:


where

The inequality (66) denotes the interior of an ellipse within the system

If
Therefore, it can be concluded that by selecting appropriate values of

and the positive definite matrix
Next, from (60) and (61), we have

where
Further, using (56) and (71) and from the fact that

with
According to the widely accepted inequality

where
According to Lemma 2, the finite time can be calculated as follows

This completes the proof.□
Simulation results and discussion
In this part, the robustness, efficiency, and superiority of the suggested controller are investigated, and a comparative study between the proposed
Operating condition for validation
System model and controller parameters: The fifth-order PEMFC air supply system model (as described by equation (8)) is considered a real system and used in all simulation cases. Note that the designed controller based on the ultra-local model depends on the input and output signal of the controlled system (as described by equation (50) and shown in Figure 3). By try and error method, the parameters of applied controllers are selected as follows: PID as
Performance indexes: The integral absolute error (IAE), the integral time-absolute error (ITAE), and the integral square error (ISE) are used to quantitatively assess the OER tracking error.
Results and analysis
Note that the main goal of the proposed
First case: Tracking performance with constant reference trajectory
In this case, the value of reference trajectory for

(a) Current load profile (A), (b) estimation of cathode pressure (CP) by using NDOB1, (c) tracking performance of OER, (d) stack voltage (V), (e) net power (kW), (f) control input (voltage of air compressor motor (V)), (g) estimation of uncertain system dynamics by using NDOB2, (h) sliding mode surface of proposed method, and (i) the variable
Performance indexes: IAE, ISE, and ITAE for all cases.

Second case: Tracking performance with optimal reference trajectory
In this case, the proposed
The observation results of two NDOBs and the tracking performance of applied controllers for regulating

(a) Estimation of cathode pressure (CP) by using NDOB1, (b) tracking performance of OER, (c) stack voltage (V), (d) net power (kW), (e) control input (voltage of air compressor motor (V)), (f) estimation of uncertain system dynamics by using NDOB2, (g) sliding mode surface of proposed method, (h) the variable
Third case: Robustness analysis with parameter uncertainties and measurement noise
The main purpose of this subsection is to verify the robustness of the designed controller. In practical applications, some PEMFC parameters may vary with the operating conditions and external environment. Because we only used the MATLAB/Simulink environment to verify the performance of the proposed controller, parameter uncertainties and measurement noise are necessary to be considered for robustness testing of the proposed method. Therefore, we added slow time-varying perturbations for the system’s parameters, such as atmospheric temperature

Parameter uncertainties: (a) the atmospheric temperature

(a) Estimation of cathode pressure (CP) by using NDOB1, (b) tracking performance of OER, (c) stack voltage (V), (d) net power (kW), (e) control input (voltage of air compressor motor (V)), (f) estimation of uncertain system dynamics by using NDOB2, (g) sliding mode surface of proposed method, and (h) the variable
Fourth case: Realistic drive cycle
It is necessary to investigate the tracking performance of the proposed method under a realistic drive cycle and time-varying reference trajectory. Thus, the effectiveness of the designed NDOB and controller for estimating and regulating OER is further tested by employing a real driving cycle ArtMw130.
54
Since this paper does not focus on energy management, a simple filtering-based-energy management strategy for fuel cell vehicle hybrid power systems is used to calculate the current load profile.
55
The vehicle speed and its corresponding current load profile are illustrated in Figure 8(a) and (b), respectively. Figure 8(c) to (j) illustrate the estimation of cathode pressure

(a) Vehicle speed (km/h), (b) current load profile (A), (c) estimation of cathode pressure (CP) by using NDOB1, (d) tracking performance of OER, (e) tracking error, (f) stack voltage (V), (g) control input (voltage of air compressor motor (V)), (h) estimation of uncertain system dynamics by using NDOB2, (i) sliding mode surface of proposed method, and (j) the variable
Conclusion
In this work, a novel
Footnotes
Appendix
Abbreviations

| PEMFC | Proton exchange membrane fuel cell |
| NDOB | Nonlinear disturbance observer |
| ULM | Ultra-local model |
| STFOSMC | Super-twisting fractional-order slidingmode control |
| PID | Proportional integral-derivative |
| MF-iPI | Model-free intelligent proportional integral |
| BOP | Balance of plant |
| OER | Oxygen excess ratio |
| LGR | Linear quadratic regulator |
| SMC | Sliding mode control |
| CP | Cathode pressure |
| MFC | Model-free control |
| AO | Algebraic observer |
| ESO | Extended state observers |
| TDE | Time-delay estimation |
| IAE | Integral absolute error |
| ITAE | Integral time-absolute error |
| ISE | Integral square error |
Handling Editor: Juntao Fei
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Tertiary Education Scientific Research Project of Guangzhou Municipal Education Bureau under Grant No. 202235165.