
Abstract
By analyzing the deficiencies of existing hydraulic erecting systems (HESs) control methods, this study proposes a linear time-varying model predictive control (LTV-MPC) method based on the linear extended state observer (LESO) for HESs. First, the working mechanism of HESs is methodically analyzed and the corresponding state space equations are established. Second, the LESO system is designed to estimate the current unknown real-time states. Then, the LTV-MPC is employed to evaluate and output the optimal solution of the servo voltage signal. Finally, through simulation and experiment, the effectiveness of the proposed method is confirmed and discussed. The results show that the displacement error rate of the proposed method is still lower than 0.223% under larger external disturbances, which can effectively improve the control accuracy and stability of the system compared with other methods.
Keywords
Introduction
As one of the main components of modern industry, hydraulic systems have specific advantages such as fast response speed, high precision, and suitable reliability. They have been extensively utilized in industrial fields such as metal processing equipment, agricultural machinery, and aerospace.1–3 With the continuous development of hydraulic technology, the importance of HESs in the defense industry has become more prominent. They can help to quickly perform important tasks such as lifting, transporting, and loading, which often have high demands on the control precision of the HES.
Although hydraulic systems have many advantages, it is not easy to achieve their precise control due to factors such as nonlinear dynamics and uncertain parameters. 4 Designing an efficient and stable control algorithm for HES has become one of the crucial research fields. The proportional integration differentiation (PID) algorithm is often employed to control large mechanical equipment due to its simplicity and ease of implementation. However, due to the nonlinearity of hydraulic systems, the PID-based algorithm often should be combined with other algorithms. Zhang et al.5–7 controlled hydraulic systems via the variable universe fuzzy PID, which enhanced the accuracy but also noticeably increased the algorithm’s complexity. Wang et al.8–10 utilized the active disturbance rejection control approach to suppress the influence of unknown external disturbances on the hydraulic system. Liu et al. 11 proposed an adaptive dynamic surface backstepping control methodology based on the fuzzy disturbance observer for the position tracking control problem of an input-saturated asymmetric cylinder electro-hydraulic servo system. However, the suggested controller required high accuracy of the system model and was readily prone to extreme fluctuations. Wang et al. 12 proposed a backstepping sliding mode control approach based on the extended state observer (ESO) to deal with the combined disturbance caused by friction force, parameter uncertainty, and external random disturbance in a valve-controlled electro-hydraulic position servo system. This controller was capable of reducing the amplitude of oscillations, but leading to an increase in the frequency of oscillations. Deng et al. 13 designed an integrated sliding mode control (ISMC) method based on kalman filter extended state observer (KFESO), which can overcome the dependence of the traditional Kalman filter algorithm on the accuracy of the model parameters to a certain extent, and improve the position tracking accuracy. Yang et al. 14 designed a nonlinear variable damping integral sliding mode controller (NSMC), which can mitigate the problem of control signal chattering and enhance the robustness of the system to external disturbances.Shi et al. 15 designed an adaptive robust control strategy to enhance the tracking accuracy and robustness of the valve-controlled asymmetric hydraulic cylinder electro-hydraulic position system with unknown nonlinear functions and parameters. This controller exhibited good robustness and could effectively suppress the effect of parameter uncertainty and external disturbances on the system performance, but it had high complexity in design and implementation. Wen et al.16,17 utilized multimodal data fusion combined with deep learning methods such as RNN to monitor the current state of the system in real time thus providing a basis for input prediction of the system at the next moment. This method can accurately identify the current state of the system in real time, but it is currently not applicable to large industrial systems such as HESs. Altan et al.18–20 has shown the superiority of MPC algorithm in the field of real-time control by analyzing the performance of linear and nonlinear systems, considering the time lag problem of the system’s control process and parameter uncertainty, and improving the MPC algorithm for different control objects. Zhao et al. develops online learning strategy algorithms by constructing the Output Feedback Algebraic Riccati Equation (OARE) to solve the input and output information, thus avoiding the lag associated with traditional offline learning. 21 With the development of deep learning, signal prediction can also be realized by different deep learning means, and some scholars are now beginning to apply the theory to the field of control. Wang et al. maps known multidimensional data to a low-dimensional space through a heterogeneous network representation learning method in order to predict the target signal. 22
In summary, in the control of hydraulic systems, the current research works have essentially focused on two issues: calculation of input signals and estimation of unknown states.
Based on the above analysis, the main problems in this field are: the state estimation algorithm is too complicated to implement, and the calculation results of the input signals are not optimal. To address these two problematic issues, this paper proposes a linear time-varying model predictive control (LTV-MPC) method based on the linear extended state observer (LESO). The expanded state observer is an observer that does not completely rely on the model. It can estimate the disturbance of the system due to factors such as model inaccuracy, internal coupling, and external intervention, and performs well in actual engineering. LTV-MPC has the ability to display processing constraints and relatively high computational efficiency, and can improve optimization performance and control robustness through rolling optimization.
First, the working mechanism of the HES is carefully analyzed and the state space equations are established. The system’s uncertain parameters are then identified through the regression least-squares method. Second, the LESO estimation is designed to estimate the real-time state of the system. Then, the LTV-MPC calculates and outputs the optimal solution for the voltage servo signal to control the operation of the HES. Finally, by comparing the simulation and experimental results with various approaches, it is shown that the control method proposed in this paper has smaller control errors and stronger stability than approaches such as backstepping sliding mode control (BSMC), adaptive robust control (ARC), and extended Kalman filter (EKF), thus confirming the effectiveness of the proposed method.
The main contributions of this paper are: (1) The application of LESO to state estimation of hydraulic systems is proposed to avoid the phenomenon that state estimation is subject to large errors due to the influence of model accuracy and other factors when there are large disturbances in the system. (2) The application of the LTV-MPC methodology to the prediction of the control volume of a hydraulic system is proposed to better adapt to the dynamics of the system.
Related works
In recent years, there has been a growing body of literature on large-scale equipment control. Many investigators have optimized and improved hydraulic equipment control methodologies from various aspects.
In terms of control input signals, Xu et al. 23 proposed a type of adaptive fuzzy PID controller based on expert systems for electro-hydraulic servo systems, which was able to adjust and optimize the PID parameters online. Kong et al. 24 established a switch-based controller for electro-hydraulic proportional systems, the so-called multi-switch mode intelligent hybrid control. The novelty of the proposed approach lies in the integration of the PID control law, fuzzy control law, and expert-based control law.
In terms of the system state estimation, Guo et al. 25 classified parameter uncertainty and unknown external loads in hydraulic systems as so-called general uncertainty and compensated for them via radial basis function (RBF) neural networks. However, in the aforementioned investigation, the RBF neural networks were only adopted to approximate the model uncertainty in a part of the control system. Han et al. 26 proposes a model predictive control (MPC) method based on a linear paremeter-varying (LPV) model to address the effect of wind speed uncertainty to hydraulic wind turbine systems. Cheng et al. 27 examined the exploitations of the RBF neural networks as well as the disturbance observers to manage partial uncertainty and interference. Nguyen et al. 28 combined neural networks with disturbance observers to estimate all unknown dynamics and disturbances.
In general, these explorations emphasize the need to estimate the unknown state and control the input signal in the system. Although algorithms based on conventional PID optimizations can achieve parameter self-adjustment, they commonly suffer from complex structures and difficult implementations. The disturbance observer-based algorithms are capable of observing multiple unknown states, but they usually require high accuracy in system modeling and are also difficult to implement in practical systems. Therefore, how to estimate the real-time state of the system in a simple and effective way, as well as how to accurately evaluate the required input signal for the system, has become the focus of current research in this field.
System description and model building
Description of the system
The typical working process of an HES is presented in Figure 1. This system consists of components such as a hydraulic pump, hydraulic valve, hydraulic cylinder, sensors, and controller. Signals such as erecting angle, cylinder displacement, and cylinder pressure are appropriately collected by suitable sensors, and the current state of the system is estimated via a state observer. The controller is able to evaluate the optimal control signal based on the current state. This is also capable of controlling the displacement of the proportional valve spool through this signal to control the flow, thus controlling the movement of the piston rod of the cylinder being installed. Then the. The linear movement of the piston rod is converted into the rotary movement of the erecting arm through the hinge mechanism, and finally, it reaches the desired angle for the erecting arm and completes the erecting function.
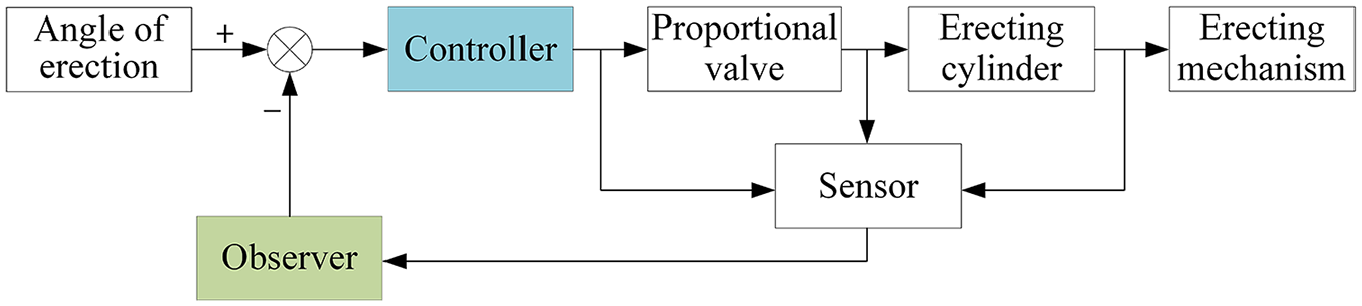
Common working process of HESs.
Mathematical model
The electro-hydraulic servo system of the erecting mechanism is illustrated in Figure 2. By analyzing its operating mechanism, the equations for each part of the system can be safely established.

Hydraulic principle of the erecting system.
According to the system flow equation and force balance equation, let us define

where

in which

For convenience of expression, rewrite equation (2) as follows:

where
The matrix-form of equation (1) can be stated by:

where

Parameter recognition
To ensure consistency between the model output and the system input under the same input, the actual system parameters must be appropriately tuned and adjusted during the state observer and controller design process. Usually, the parameters of the actual state of the system under normal conditions are employed as the standard. However, in the system model, there may be some uncertain parameters such as
Based on the historical data measured by the system, equation (5) can be deduced to:

where
The principle of model parameter estimation based on the recursive least squares (RLS) method can be described as follows.
34
In the studied historical data window, the squared difference between the actual values and the estimated values should be appropriately minimized, and the cost function

where
For the cost function



Equations (8) to (10) represent the recursive process of the RLS. In the above recursive formula, the initial value can be empirically set as
Design of the HES controller
The motion control of the HES adopts the control strategy presented in Figure 3, which consists of two main components: a linear extended state observer (LESO) for the electro-hydraulic servo system and a linear time-varying model predictive controller (LTV-MPC). For device path planning in the presence of uncertainty sources, selecting a suitable optimization function, modeling it in the form of linear constraints of LTV-MPC and converting it to a convex optimization problem through algebraic simplification, predicting the state behavior in a certain time range near the operating point, and thus seeking the optimal solution of the control signal input, can improve the control accuracy under the premise of satisfying the constraints.35–37 The extended state observer (ESO) is able to effectively estimate different order states of the controlled object without relying on the disturbance model, and the introduction of linear expanded state observers into the control system enables the output of the closed-loop system to asymptotically track the input signal. The observed values could participate in the feedback linearization of the system compensation loop and thus achieve precise control of the system. 38 The LESO serves as a prerequisite to accurately estimate the current state of the system and prepare for the controller, whereas the LTV-MPC is the main component that is capable of predicting the system state based on the current state and the prediction mode, as well as calculating the optimal control signal.39,40

Control principle of the LTV-MPC method based on the LESO.
Design of the extended state observer
The extended state observer that introduces a linear error function has a more efficient parameter tuning rule. 41 Figure 4 illustrates the structure diagram of the linear extended state observer.

Structure of the linear extended state observer (LESO).
Let us define

where

and the bandwidth concept is adopted to determine the parameters of the linearly expanding state observer
The configuration of parameters

Design of the LTV-MPC
The principle of LTV-MPC is illustrated in Figure 5. Three basic principles of the model predictive control read: predictive modeling, rolling optimization, and feedback correction.
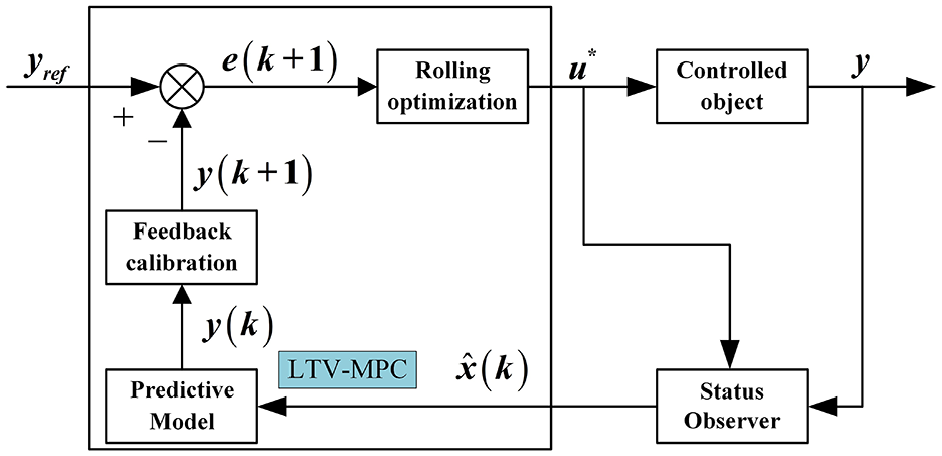
Control principle of the LTV-MPC.
Predictive modeling: Predictive modeling is the basis of model predictive control. Its main function is to predict the future output of the system based on historical information and future inputs from the object.
Rolling optimization: model predictive control determines the control effect through the optimum of a certain performance index, but the optimization is not carried out offline at a time, but repeatedly online, which is the fundamental point of the model predictive control differentiated from the traditional optimal control.
Feedback correction: In order to prevent model mismatch or environmental disturbances from causing the control to deviate from the ideal state, the actual output of the object is first detected at a new sampling moment and this real-time information is used to correct the model-based prediction results before a new optimization is performed.
In the control process, the controller according to the current measurement value and prediction model, predicts the output of the system in the future time domain, by solving the optimization problem to satisfy the objective function and various constraints, to obtain a series of control sequences in the control time domain, and the first element of the control sequence as the actual control of the controlled object to control the system, and repeat the process, and so on, so that the completion of a rolling optimization problem with constraints to realize the continuous control of the controlled object.
Compared with other controllers, LTV-MPC possesses the advantages of adaptability, predictability, system interpretability, and ease of implementation and optimization, so this type of controller is commonly utilized in industrial automation, robot control, aerospace, and other fields.
Linearizing the model
Since the HES is dynamically nonlinear, it should be appropriately linearized before it can be used in a linear time-varying prediction model.
The linearization of the state function of the HES is obtained:

where
The process of forecasting
By obtaining the discrete linearized model of the system from equation (15), let us set:

Then, a new state space expression is obtainable as:

where the matrices are defined as follows:
Reducing them further to
If the prediction time domain of the system is


After simplification, the output of the system at future times in the matrix form is expressed by:

where
Both state and output quantities in the prediction time domain can be evaluated from the current state quantity
To track the desired trajectory, the following objective function is designed to reflect the tracking performance of the controlled system:
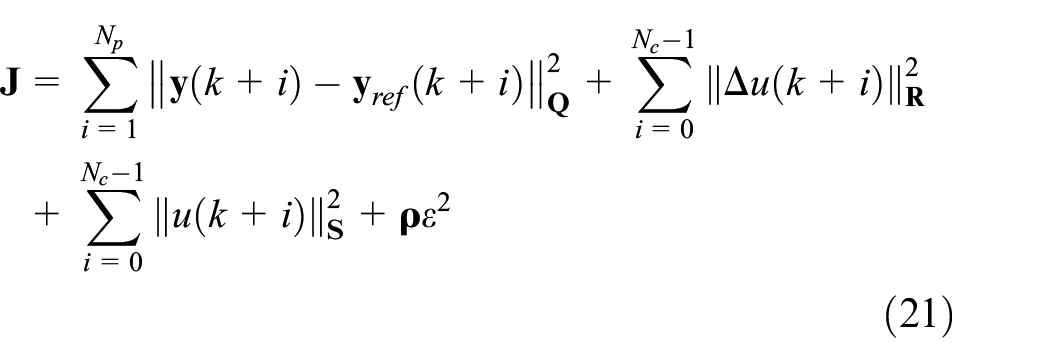
Where
In this control system, the following constraints should be suitably satisfied:
Kinetic constraints:

Control variable constraints:

Control of incremental constraints:

Output constraints:

Substituting equation (20) into equation (21) and expressing the output deviation in the prediction time domain as:

In the model predictive control process, the problem is usually transformed into a QP optimization problem to be solved, so it is necessary to adjust the corresponding matrix to the QP form.

where
If the system state

Through the above optimization process, at each new time, the system predicts new outputs based on the real-time state and calculates new optimal control increments to achieve optimal rolling control of the system.
Simulation and experimental analysis
Simulation analysis
To validate the control method proposed in this article, simulations have been performed by using MATLAB/Simulink. For this purpose, the simulation model is demonstrated in Figure 6. In the parameter setting of this model, the internal leakage and friction of the HES are considered, which influence the performance of the system. In the MATLAB/Simulink model, the displacement command signal is input, the controller algorithm is written, and the simulation data is collected, and the external disturbance force is applied to the model based on various working conditions.
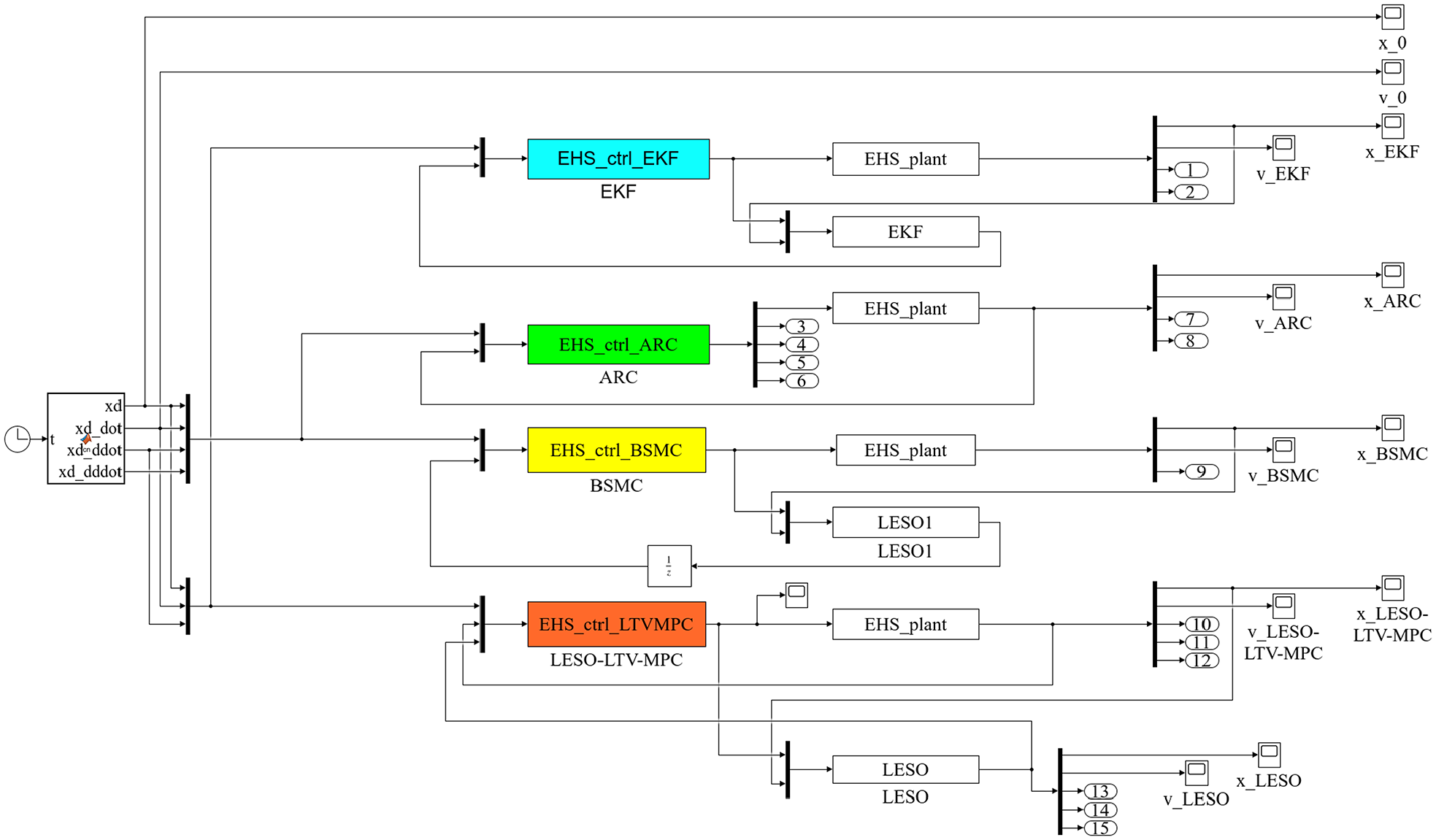
HES control simulation.
Simulation 1
To investigate the effectiveness of the LTV-MPC control based on the LESO, different control strategies have been implemented to control the HES through simulations. The control effects of different strategies are aimed to be compared, as illustrated in Figures 7 and 8.

Simulated displacement tracking under various control strategies.

Simulated speed tracking under various control strategies.
According to the simulation results of Figures 7 and 8, it can be seen that in the field of nonlinear system control, the BSMC is able to make the system state track the desired value quickly and accurately by designing a suitable sliding surface. However, due to external interference, it may cause some jitter in the displacement control curve. In addition, the ARC exhibits good robustness and is able to effectively suppress the influence of parameter uncertainty on the system performance. However, the process possesses a certain adaptation and is commonly prone to jitter in the case of load changes, so there will still be some displacement control errors. The EKF-based controller has higher estimation accuracy in application to nonlinear systems and is able to reduce the jitter amplitude of the displacement control curve. The LESO-LTV-MPC proposed in this paper is capable of overcoming the parameter uncertainty and complex system nonlinearity, with small steady-state error and less obvious jitter phenomenon.
Simulation 2
To check the robustness of the proposed control method, different external disturbance forces are applied to verify the control effect under external disturbance conditions. The considered three sets of external disturbance forces are:

Simulated displacement tracking under various disturbances.

Simulated speed tracking under various control disturbances.
According to the plotted results in Figures 9 and 10, it can be seen that in the presence of a disturbance force, the output displacement and the output velocity of the system possess small fluctuations, and with the increase of the disturbance force, the amplitude of these fluctuations gradually increases; nevertheless, the proposed controller is still able to exhibit good control performance. It implies that in the presence of various disturbance forces, the LESO-based LTV-MPC is still able to maintain a good control effect on the system.
Experimental analysis
The effectiveness of the proposed control strategy has been verified in a simulation system constructed in MATLAB/Simulink environment, and the corresponding test system is illustrated in Figure 11. The main modules of the system are: control module, execution module, data collection module, and display module. The control module is controlled via a platform based on the Labview’s acquisition card, and MATLAB/Simulink is connected to Labview through the corresponding SIT driver. The actuator modules are mainly bi-directional gear pumps made from Honor, proportional directional valves made from Rexroth, and single-stage cylinders manufactured by Hengli. In the data acquisition module, the data acquisition card selects the multifunctional high-speed data acquisition card of National Instruments, which adopts the form of module, separates analog input, analog output, digital input and digital output, and connects them together through the card slot, with compact structure and convenient connection. Pressure sensor is used to measure the pressure of the pump outlet of the vertical system and the pressure of the vertical cylinder inlet and outlet, choose DANFOSS pressure sensor, model number MBS 305036-111-AB04. Displacement sensor is used to detect the stroke of the vertical cylinder in the process of vertical erection, to ensure that its movement to the right position, and can measure and record the displacement change in the experimental process, choose mitan-tech Displacement sensor, model MPS-M-3000-V2. The working conditions of the test bench: external ambient temperature 20°C–40°C, air relative humidity ≤80%. The sampling rate of the capture card is 1 K Hz. The main parameters of the test bench are shown in Table 1.

HES control system test bed.
Main parameters in simulation.

Test1
In order to verify the superiority of the strategy proposed in this paper, BSMC, ARC, EKF, and LESO-LTV-MPC were selected to conduct the position signal tracking control test of the erecting cylinder, and the performance of different controllers was evaluated by observing the displacement response of the cylinder under control. The results are shown in Figures 12 and 13, and the numerical comparisons of displacement tracking errors are shown in Table 2.

Experimental displacement tracking under various control strategies.

Experimental speed tracking under various control strategies.
Comparison of displacement error subjected to various disturbances.

According to Figures 12, 13 and Table 2, it can be seen that when utilizing the BSMC control strategy, the system deviates from the ideal sliding-mode motion due to the influence of external noise and other influences, which affects the control accuracy with a displacement error rate of 0.424%. When utilizing the ARC control strategy, the model parameters cannot be fully consistent with the actual system parameters, and the ARC relies on online estimation of the system parameters, resulting in a low displacement control accuracy of the system with a displacement error rate of 0.295%. When utilizing the EKF control strategy, there is a deviation between the designed system model and the actual system, and the EKF is overly dependent on the accuracy of the model, resulting in a certain displacement error in the system, with a displacement error rate of 0.158%. When utilizing the LESO-LTV-MPC control strategy, due to the low demand for model accuracy imposed by LESO, the steady-state error is relatively small, with a displacement error rate of 0.019%. In summary, the LESO-LTV-MPC method has higher position tracking accuracy compared to other methods.
Test 2
In order to further verify the robustness of the proposed strategy, the position signal tracking control test of the erecting cylinder is carried out after applying different disturbing forces to the erecting system, and the robustness of the proposed control strategy is evaluated by observing the displacement response of the cylinder under different disturbances. The results are shown in Figures 14 and 15, and the comparative results of displacement tracking errors are shown in Table 3.

Experimental displacement tracking under various disturbancess.

Experimental speed tracking under various disturbances.
Comparison of displacement error subjected to various disturbances.

According to Figures 12, 13, and Table 3, it can be seen that after entering a stable state in the lack of external interference, the displacement error ratio is 0.019%, which shows that the control effects of the displacement and speed of the system are at a very good level. When the interference force is set equal to 2 × 105 N, the displacement error ratio is obtained as 0.117%. As the interference force is set as 6 × 105 N, the displacement error ratio reaches 0.174%, and for the case of the interference force of magnitude 10 × 105 N, the displacement error ratio is obtained as 0.223%. The obtained results indicate that after applying the external interference force, a small error is developed in the displacement and a slight fluctuation is detectable in the speed, but the overall control accuracy is still very high, which is able to suitably meet the working requirements of the system. In other words, the proposed control strategy is so effective and possesses good robustness. In summary, the LESO-LTV-MPC method has strong robustness.
Conclusions
In response to the problems of parameter uncertainty and external random disturbances in the erecting hydraulic control system, this paper proposes a recursive least-squares methodology to unlock the parameter uncertainty problem. To this end, a linear time-varying model predictive control method based on the LESO is established to solve the problem of external random disturbances. By introducing a dynamical compensation term to accurately estimate the current state of the system, the controller is capable of calculating the optimal control signal of the system in the presence of various external disturbances and thereby controlling the system to move in the desired direction; therefore, the proposed approach possesses strong robustness. Based on the simulation analyses and experimental results, the following results can be drawn from the present investigation:
The recursive least-squares method is able to accurately identify the uncertain parameters in the system, thus establishing a more accurate system model.
The LESO method is capable of accurately estimating the current state of the system by using the LESO to estimate the system state and suppressing its interference by introducing a dynamic compensation term, which provides sufficient information for the controller’s predictive control.
Compared with the BSMC, ARC, EKF, and other methods, the LESO-based LTV-MPC approach is able to capture the optimal solution of the control signal based on the current state of the system, predictive model, and feedback, and the displacement error rate can be reduced to 0.019%, which dramatically improves the displacement control accuracy of the system.
Through experimental verification, even when the system is subjected to substantial external disturbances, the displacement error ratio is still below 0.3%. The LESO-based LTV-MPC approach is still able to maintain good displacement control accuracy, effectively suppress external disturbances, and exhibits high robustness.
Based on the above conclusions, this research is expected to be used in modern industries that use large hydraulic systems in equipment such as shield machines, excavators, weapons transloading equipment, and other defense and civil industries.
Footnotes
Handling Editor: Sharmili Pandian
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The following grants were received for this research: National Natural Science Foundation of China (51905541), Basic Research Program of Natural Science of Shaanxi Province (2020JQ487), Shaanxi University Association for Science and Technology Young Talent Support Program (20190412).