
Abstract
In this study, a zero-spin cone-roller traction drive (CRTD) is presented for the joints transmission system in rehabilitation robots due to its high transmission performance and characteristics of overload protection. It can achieve safe interactions among humans, rehabilitation robots, and the environment, making it a potential substitute for traditional gear-based transmission systems. The performance of CRTD, especially efficiency, is studied in this paper based on an elastohydrodynamic lubrication (EHL) model with the considerations of the non-Newtonian effect. The results demonstrate that the overall efficiency differs in different stages, reaching a maximum value of 95%. The overload protection activates when there is a sharp drop in efficiency, and the overload threshold can be identified by the efficiency, which may provide guidance for operation and optimization.
Keywords
Introduction
With the development of the medical–industrial integration technology, rehabilitation robots, as shown in Figure 1, have become widely used to provide auxiliary power for the rehabilitation training of patients to help rebuild nervous tissue.1,2 As the key components in rehabilitation robots, joints transmission system must have the following characteristics: small size, low torque ripple, high level of transmission precision, and overload protection. 3 Traditionally, the gear-based transmission systems have been widely used in joint driving systems for the industry robots and achieve relatively favorable performance. However, this gear-based system is essentially a rigid transmission system without overload protection, which may be inappropriate for rehabilitation robots if the safety is in consideration. Traction drives have recently drawn more research attention in joint transmission systems due to their characteristics of small size, low vibration, high precision, and overload slipping,4,5 making it potential to substitute traditional gear-based transmission systems to achieve safe interaction and integration among humans, rehabilitation robots, and the environment.

Rehabilitation robot and its joint transmission system.
The power and motion in traction drives are transmitted by the film in the gap of the rolling element and disks, and recent developments have heightened the need for increasing the transmission performance, especially in terms of the transmission efficiency.6–9 Florian et al. 10 studied the trade-off behavior of half-toroidal CVT between the dynamics of ratio variation and efficiency performance. In a later study, the trade-off behaviors of the full-toroidal and half-toroidal CVT were compared, and the results showed that the half-toroidal configuration outperforms the full-toroidal one over the entire operating range. 11 Luo et al. 12 presented a type of adaptive loading ball traction drive reducer and compared the traction drive performance under constant and adaptive loading. An asymmetric loading multi-roller planetary traction drive and a refined analysis model were developed by Jiang et al. 13 to investigate the traction capacity and transmission efficiency, achieving a maximum transmission efficiency of 98.5%.
The spin loss generally dominates the power loss and has a significant impact on the efficiency performance, which can be eliminated by proper structural design.14,15 Li et al. 16 and Jiang et al. 17 experimentally examined the film thickness through interferometry measurements and found that the film shape was obviously skewed if spin was introduced. Cretu and Glovnea 18 evaluated the effect of spin motion on traction curves and proposed an original method to reduce the spin loss. Novellis et al. 19 demonstrated that the efficiency and traction capacity of the double-roller full-toroidal variator was enhanced when zero-spin was achieved. Later, Li et al.20,21 developed a novel toroidal CVT with a logarithmic surface to eliminate the spin loss theoretically, which proves that the efficiency of the logarithmic CVT is higher than that of the half-toroidal CVT; several zero-spin schemes of the roller-disk type traction drive were provided based on the principle of zero-spin.22,23
Generally, the maximum pressure in contact areas can reach the GPa level, and the lubricant exhibits non-Newtonian behavior under such high pressures.24,25 Tevaarwerk and Johnson 26 studied the elastic effects with the proposed J-T model and indicated that the traction drive performance largely depended on the rheological properties. Kohshiro et al. 27 investigated the relationship between the maximum traction coefficient and temperature based on the determined rheological parameters. Liu et al. 28 developed a thermal EHL model to deal with the effective viscosity of the Eyring shear thinning fluid with spin motion involved. The performance of the NuVinci drive was also estimated by Tomaselli et al. 29 based on the simplified EHL model with considerations of the non-Newtonian effect.
Although much efforts have been conducted for traction drives, the simplified models based on the assumption of ellipsoidal distributed pressure may be unable to estimate the traction drive performance accurately. In this study, a zero-spin traction drive system is proposed herein to potentially substitute the traditional gear-based transmission for rehabilitation robots, and the performance of CRTD, especially efficiency, is studied based on EHL model with the considerations of the non-Newtonian effect. The rest of this paper is organized as follows: the numerical model is established in detail in section “Descriptions of CRTD,” the efficiency performance of CRTD is illustrated and discussed in section “Results and discussion,” and section “Conclusions” concludes the paper.
Descriptions of CRTD
Geometrical and kinematics description
The geometry of the CRTD mainly consists of two cones and rollers, as displayed in Figure 2, and the points

Where

Schematic diagram of the CRTD.
Spin motion occurs when there is a relative angular velocity along the tangent line and leaded to a high level of spin loss. However, this spin motion can be weakened or even eliminated through proper design. Following the principle described in previous researches,22,23 zero-spin is achieved for CRTD when the intersections formed by these axes coincide with each other, which means that the points

The ideal speed ratio


The ideal speed ratio
Although the spin motion can be eliminated through proper design, relative slipping is required to produce a traction force and then transfer power. It is necessary to describe the slipping behavior of each contact pair to achieve a more accurate kinematics description of CRTD; the concept of creep is also introduced to estimate the relative slipping:

Where
Based on the definition, the actual speed ratio

Where
Equilibrium and efficiency description
The free-body diagram of the CRTD with zero-spin is presented in Figure 4, where an external axial bearing balances the roller.
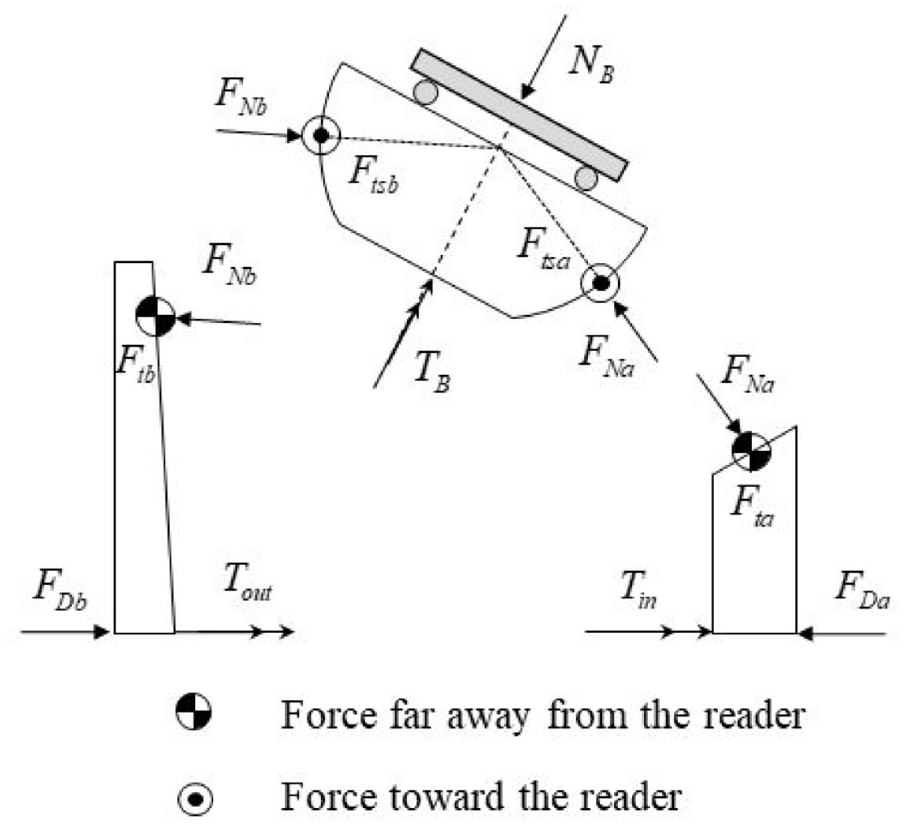
Free-body diagrams of the transmission parts.
For the driving and driven component


For the rotating roller

Where
The empirical formula proposed in Carbone et al. 15 is adopted to estimate the torque loss caused by the axial bearing:

According to these equilibrium equations, the overall efficiency of the CRTD can be expressed as the product of the speed efficiency

Where
Contact description
The traction force used to transfer power originates from the lubricant shear behavior under high pressure level, and a typical contact action of elastohydrodynamic lubrication is shown in Figure 5(a). The rolling action of disks 1 and 2 – with speeds of

Where

Schematic of lubrication in the traction drive: (a) distributions of pressure and shear stress in typical EHL; (b) rheological behavior between a Newtonian and non-Newtonian fluid.
In the current study, the Reynolds equation in the cartesian coordinate system is used to determine the fluid pressure under steady-state condition, expressed as

The boundary conditions for the Reynolds equation are as follows:

Where
Previous studies have shown that the surface deformation induced by the fluid pressure has a significant impact on the film thickness, and the film thickness in equation (12) can be expressed as follows:

Where
Additionally, the following equations are employed to estimate the relationship between the viscosity and density:


Where
The normal force

Results and discussion
As a key index of the traction drive performance, the transmission efficiency of CRTD is explored in this section based on the parameters listed in Table 1. During the simulation process, the creep coefficients
Simulation parameters for CRTD with zero-spin.

The information on the overall efficiency and power loss of CRTD are presented in Figure 6(a). It can be observed that the overall efficiency quickly increases with the output torque in the initial period, and then increases smoothly, finally decreasing at higher output torques. A maximum efficiency of 95% is obtained during the simulation process, and such overall efficiency is due to the power loss induced by the slipping loss. The power loss is low and slightly increases when the output torque is less than about 22.5 Nm, resulting in the proportion of power loss decreasing gradually. High-level creep is required to generate the required output torque, and the power loss increases sharply at this stage.

Plots of the efficiency and power loss as a function of the output torque: (a) overall efficiency and power loss; (b) torque efficiency and speed efficiency.
As shown in Figure 6(b), the defined efficiencies for the traction drive, namely the torque efficiency and speed efficiency, exhibit an opposing trend with the output torque. The torque efficiency behaves the same in terms of the early overall efficiency and keeps increasing with the output torque. The speed efficiency decreases progressively in the early period and decreases sharply when an enhanced traction force is required, which necessitates a high level of relative slipping in contact areas. The rapidly decreasing efficiency at high levels of output torque may be unsuitable to transfer power, however, it can effectively protect patients due to overload slipping and achieve safe interactions among humans, rehabilitation robots, and the environment when CRTD is utilized for the joint transmission systems in rehabilitation robot.
The distribution of shear stress in contact areas under different

Contours of shear stress at different output torques: (a) Crin=0.0176 and (b) Crin=0.0784.
The relationships of the overall efficiency and creep with the output torque are shown in Figure 8 to further showcase the effect of the rotating speed. As shown in Figure 8(a), the overall efficiencies in both cases are consistent with each other when the output torque reaches about 22.5 Nm, however, the overall efficiency declines when
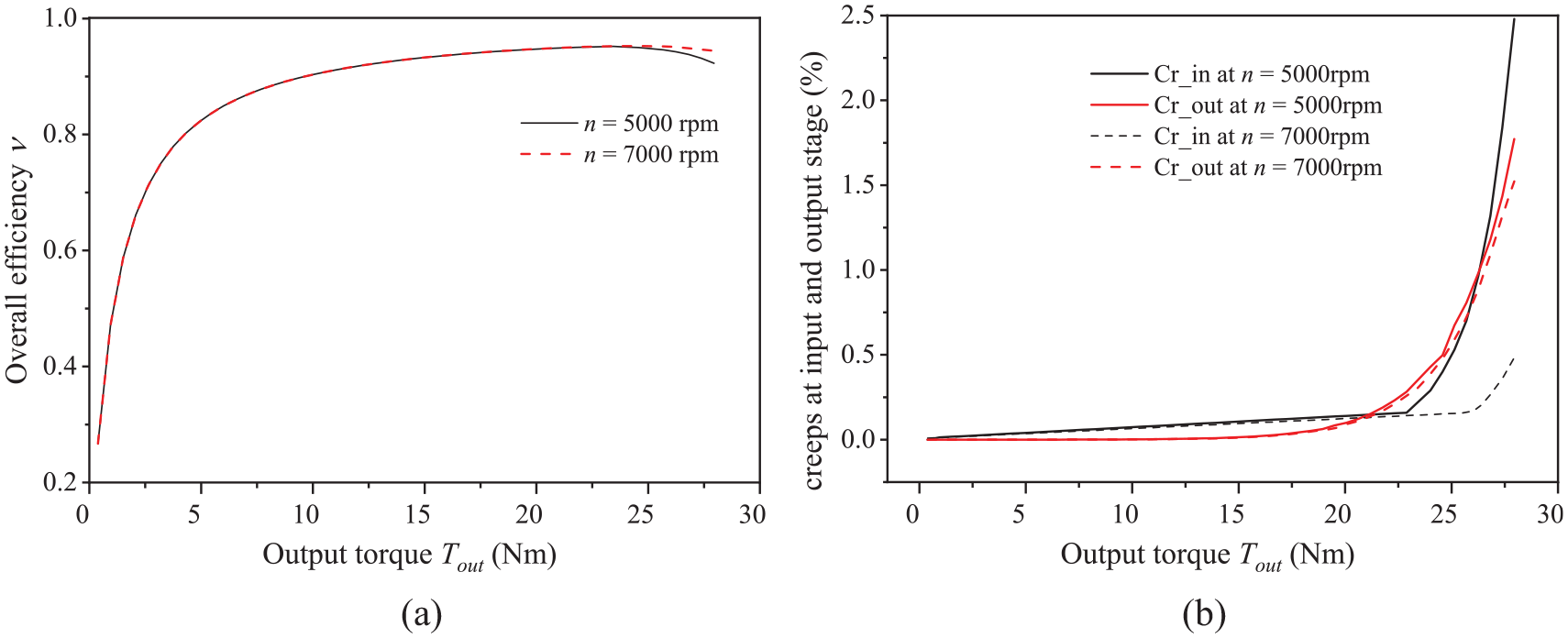
Comparisons of CRTDs at different speeds: (a) overall efficiency; (b) the creeps at the input and output stage.
As shown in Figure 8(b), the creep coefficients in the input and output stages increase progressively in the early period and increase sharply when a further output torque is applied. The creep coefficients in the input stage, referring to the red lines, are almost the same for both cases. However, a sharply increasing behavior in the output stage is observed, and the turning points of the creep prematurely occur. This suggests that the traction drive may be in sliding failure due to the high-level creep in the input stage, and the overload protection automatically activates if CRTD is equipped in the joints transmission system.
The relationship between the maximum shear stress

Plot of the maximum shear stress of the input stage at different speeds.
Conclusions
In this paper, a new type of zero-spin traction drive (CRTD) is presented for the joints transmission system in rehabilitation robots to potentially substitute the traditional gear-based transmission. Its efficiency performance is primarily studied based on the EHL model with the considerations of the non-Newtonian effect, where the traction force is obtained by integrating the shear stress over the contact areas. The overall efficiency of CRTD can be divided into three stages, achieving a maximum value of 95%. The rapidly decreasing efficiency in the last stage may be unsuitable for transferring power, however, it can effectively protect patients due to the characteristic of overload protection and achieve safe interactions among humans, rehabilitation robots, and the environment if CRTD is equipped in the joints transmission system. The speed effect indicates that traction drive system is more suitable for high-speed scenarios, and sliding failure prematurely occurs at lower speeds, which may potentially provide guidance for the operation and optimization of zero-spin traction drives used in rehabilitation robot joints transmission system.
Footnotes
Acknowledgements
The authors would like to thank the National Nature Science Foundation of China, China Disabled Persons’ Federation, Chongqing Bureau of Science and Technology and Chongqing Electronic Engineering Vocational College. The authors also appreciate the reviewers and editor for their valuable comments on the manuscript.
Handling Editor: Aarthy Esakkiappan
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study is funding by the National Nature Science Foundation of China (Grant No. U19A2082), Project of China Disabled Persons’ Federation (2021CDPFAT-25), Talents Program of Chongqing Bureau of Science and Technology (cstc2021ycjh-bgzxm0319), Scientific and Technological Research Program of Chongqing Municipal Education Commission (KJQN202103112, KJQN202303123, KJQN202303124, KJZD-K202203104) and Chongqing Electronic Engineering Vocational College College-level Project (XJWT202101).