
Abstract
Range extended electric vehicles (REEVs) offer a solution to the limited range of pure electric vehicles by incorporating an additional energy source. Effectively managing the output power among these energy sources is the key to reduce operating cost. To enhance the economy of REEVs, this paper proposes a multi-objective optimal energy management strategy (MOEMS) that considers battery degradation. The powertrain of the REEV is comprehensively modeled by integrating the efficiency of the range extender, battery, and driving motor. MOEMS is designed to instantaneously minimize the total operating cost of the vehicle, including factors such as fuel consumption, electricity consumption, and battery degradation. To minimize the frequency of engine starts and stops, the cost associated with engine startup is integrated into the objective function. Two control coefficients are introduced into the objective function to regulate the battery state of charge. Additionally, another coefficient is employed to restrict variations of engine output power, thereby avoiding significant fluctuations of engine load. Simulation results show that compared to the adaptive equivalent consumption minimization strategy (AECMS) and rule-based energy management strategy (REMS), the total cost of MOEMS is reduced by 9.1% and 32.3% in WLTC driving cycles, and by 7.9% and 31.7% in CLTC driving cycles.
Keywords
Introduction
To seek the reduction of carbon emission, the new energy vehicles (NEVs) have been in the high-speed development period. Among these NEVs, the range-extended electric vehicles (REEVs) stand out as a significant category, boasting two key advantages. Firstly, REEVs allow the engine to charge the battery while the vehicle is driving, thereby extending the vehicle’s range. Secondly, REEVs decouple the torque and speed of engine from the vehicle’s demand torque and speed, ensuring that the engine operates within its high-efficiency range. For REEVs, there are two main controlling modes: blended (BL) and charge depleting-charge sustaining (CD-CS).1,2 The BL control mode gradually depletes the battery power throughout the entire driving cycle, adapting its behavior according to the trip’s duration. In contrast, the CD-CS control mode segments the trip into two distinct phases: CD and CS. During the CD phase, the vehicle operates solely on electric power, which can avoid to consume the fuel in short distance trip. In the subsequent CS phase, the battery state of charge (SOC) should be maintained within a reasonable range after the battery SOC is relatively low. Therefore, the energy management strategies (EMSs) mainly focus on the CS phase. 3
EMSs can generally be categorized into two main approaches: rule-based and optimization-based methods. Rule-based EMS involves the formulation of control rules that are developed based on engineering expertise or empirical calibration results. These rules are then used to determine the operational mode of the vehicle according to a predefined set of guidelines. The thermostat strategy (THS) 4 and power following strategy (PFS) 5 are two typical rule-based EMSs, and some researchers have built upon these foundational strategies to enhance their performance.6–9 Kim et al. 10 combined the advantages of THS and PFS and proposed a hybrid thermostat strategy. In addition, there are other types of rule-based EMSs, such as EMSs based on state machine, 11 EMSs based on fuzzy logic control,12–14 EMSs based on neural network,15–18 and rule-based EMS based on dynamic programming (DP). 19 Rule-based EMSs are known for their robustness and ease of implementation, making them effective solutions for real-time applications. However, rule-based EMSs determine the distribution between energy sources through engineering experience rather than calculations, so its results do not have any guarantee of optimality.
Optimization-based strategies typically derive optimal control actions by optimizing predefined cost functions, enabling the attainment of improved optimization objectives. The introduction of DP-based global optimization EMS can be traced back to the research conducted by Chan-Chiao et al. 20 to achieve global optimization for hybrid electric trucks. DP can guarantee to obtain the global optimal solution under a given driving condition, which is generally used as the benchmark of other strategies. DP faces practical challenges when applied to real vehicles, primarily due to the dimensionality catastrophe in numerical method solutions and the requirement of predicting global operating conditions in advance. To enhance computational efficiency, alternative strategies have been developed to approximate global optimal solutions. These approaches determine the optimal energy source distribution for each moment by optimizing the vehicle’s cost function at specific instants. The commonly used instantaneous optimization strategies can be divided into equivalent consumption management strategy (ECMS),21,22 model predictive control (MPC)-based EMS,23,24 and learning-based EMS.25–28 In the ECMS, the battery electricity consumption is equated to fuel consumption through an equivalence factor, and then the optimal control quantity is obtained by solving for the minimized equivalent fuel consumption. The optimal equivalent factor can achieve similar results to DP, however, the optimal equivalent factor EF depends on the driving conditions and vehicle parameters, 29 so it is necessary to update the value of the equivalent factor in real time during the actual driving process, that is, adaptive ECMS (AECMS). At present, adaptive ECMS are mainly divided into PID-ECMS,30,31 rule-based ECMS,32,33 and predictive ECMS.34,35 Some literatures use shooting method to solve the optimal equivalent factor, but this method will increase the calculation time. Yao et al. 36 proposed an analytical method to solve the equivalent factor based on quadratic programming by rewriting the output equation and the equation of state of the optimization problem. Wu et al. 37 proposed a robust online EMS based on ECMS that can deal with driving cycle uncertainty, proposing the concept of equivalent efficiency and transforming the constraints of battery SOC in the optimization model into an objective function.
The aforementioned optimization-based methods only consider fuel consumption and electricity consumption but often overlook the degradation of the battery, which will directly affect the total operating cost of the NEVs. 38 A growing number of researchers are focusing on multi-objective electromagnetic systems that consider battery degradation. Based on Pontryagin minimum principle, Yi et al. 39 proposed a hybrid energy storage electric vehicle EMS considering battery degradation, conducted cycle life tests on the battery and established a battery degradation model. Liu et al. 40 established a multi-objective optimization model considering energy consumption, emission, and battery life and proposed a hybrid point-line EMS. DP optimization algorithm was applied to obtain the best curve/area of the engine offline, and then proposed an adaptive approach used a fuzzy logic controller with battery consideration to adjust parameters in real time. Xie et al. 41 considered the effect of battery discharge depth on battery degradation and established an objective function with fuel consumption, electricity consumption, and equivalent battery life loss, and obtained the optimal power distribution under the city bus speed distribution through convex programming. In Wu et al., 42 a hybrid electric bus EMS based on machine learning was proposed by introducing the health constraint of battery overheating into the objective function, and combined the deep deterministic policy gradient algorithm with an expert-assistance system to optimize the power allocation. Li et al. 43 described the multi-objective energy management problem as the problem of minimizing the total operating cost, and proposed a real-time multi-objective predictive EMS, which combined the direct multiple shooting method with the sequential quadratic programming algorithm to improve the real-time performance of the online optimization process. Tian et al. 44 proposed a hybrid multi-objective optimization algorithm called HMOFFO, which combined the fruit fly optimization algorithm and simulated annealing mechanism is developed to seek the promising Pareto solution set. Hu et al. 45 proposed a real-time multi-objective optimization method based on an adaptive equivalent consumption minimum strategy, which takes into account the dynamic characteristics of the battery and various operating conditions and adds a battery degradation model to the objective function. Jia et al. 46 proposed a new real-time LPV-MPC strategy based on the LPV prediction model for battery-supercapacitor hybrid energy storage systems in electric vehicles, considering both the power loss of HESS and the battery degradation and adjusting the SOC of supercapacitor in real time.
While the aforementioned methods incorporate considerations for fuel consumption, electricity usage, and battery degradation, they frequently lead to great variation in engine output power over brief periods which will force the engine to operate under extreme conditions, resulting in a significant decline in overall engine efficiency. Furthermore, the substantial fuel consumption resulting from frequent engine start-stop events is a notable concern. Existing literatures typically incorporate an engine start-stop penalty factor into the optimization objective, while neglecting the specific fuel consumption incurred by the engine during the startup process.31,47,48 Taking an extended-range electric vehicle as the research object, this paper establishes objective functions including fuel consumption cost, electricity consumption cost, battery degradation cost, and engine start-up cost, and the constraints of battery SOC are transformed into the objective functions by two coefficients dependent on battery SOC. In addition, a penalty factor is introduced into the objective function to avoid the substantial fluctuations of the engine output power.
The chapters of this paper are arranged as follows: In the second section, the transmission system of REEV is modeled. Three kinds of EMSs are presented in Section “Energy management strategy.” In the fourth section, the feasibility and effectiveness of the proposed strategy are verified by simulation. The fifth section is the main conclusion of this paper.
Powertrain structure and system model
The powertrain system of REEV is mainly composed of range extender also called auxiliary power unit (APU), battery, driving motor, and transmission, and its structure is shown in Figure 1. It can be seen that both the APU and battery provide power for the driving motor. The relationship among the APU output power, battery output power, and the vehicle demand power can be built as:


Powertrain structure of the investigated REEV.
Longitude dynamic model of vehicle
The longitudinal dynamics of the REEV is modeled as follows:


where
Parameters of vehicle and powertrain.

Efficiency model of driving motor
The main focus of this paper is the energy management strategy for REEVs, so the efficiency model of driving motor is quite important. Considering the difficulty to accurately simulate the motor efficiency by using the electromagnetic model, we build the efficiency model of driving motor based on the test data, which forms an efficiency map of driving motor. Efficiency of the driving motor is determined via interpolation of the motor’s torque and speed from the efficiency map presented in Figure 2.
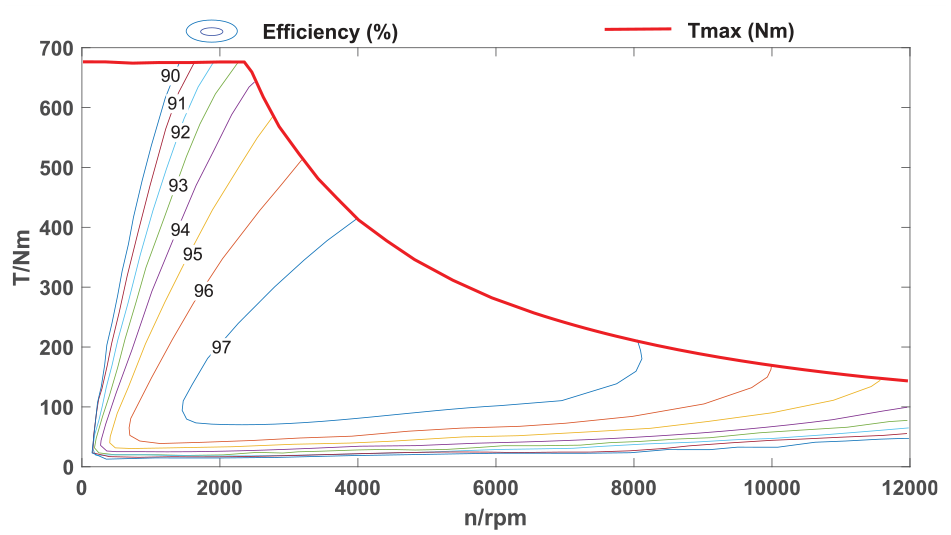
Efficiency map of driving motor.
The driving motor in the REEV operates in two modes: electric driving mode and generating mode. In the electric driving mode, the motor serves as the exclusive propulsion source for the vehicle, providing the necessary driving force. While in generating mode, the motor acts as a generator to regenerate the brake energy lost during braking. Given that the brake force is supplied by the motor and friction brake, the driving motor only recovers a portion of the brake energy. In circumstances where the vehicle’s speed is below 10 km/h, the motor does not regenerate the brake energy, as its efficiency decreases significantly in such cases. Therefore, the motor speed and torque can be expressed as follows:


where
The actual power consumed by the motor can be expressed as

where
Efficiency model of APU
The APU consists of the engine, generator, and DC/DC convertor, both the engine and generator are modeled by efficiency map model in this study. The engine fuel consumption and generator efficiency are shown in Figure 3.

The engine fuel consumption and generator efficiency: (a) the fuel consumption map and (b) the generator efficiency map.
Since the generator is mechanically coupled to the output shaft of engine, they operate at the same working points. Thus, the output power of APU can be expressed as

where

The optimal specific fuel consumption for each
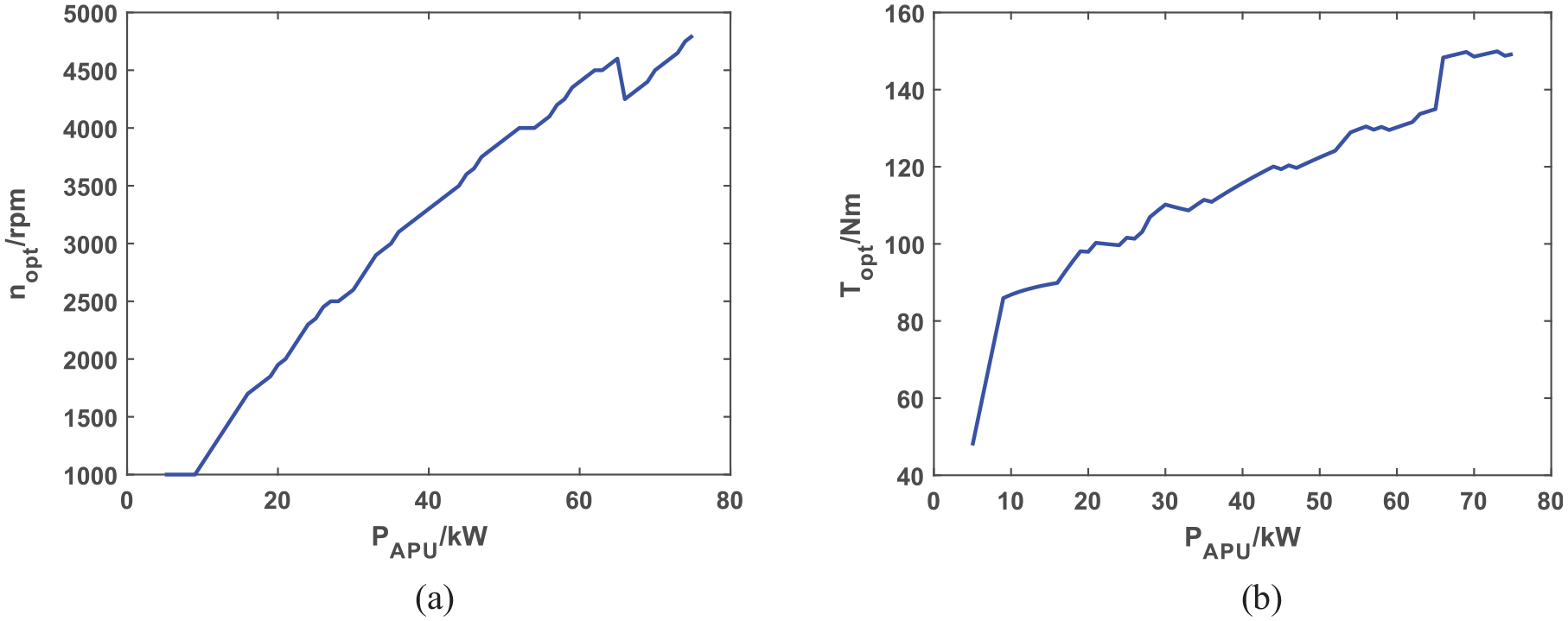
The optimal operating curve of APU: (a) optimal speed curve of APU and (b) optimal torque curve of APU.
When the APU output power is

where
Modeling of battery
For the power battery in REEV, a model of internal resistance (R-int) is devised which contains a resistor and a voltage source, as displayed in Figure 6. This model overlooks the intricate electrochemical reactions that occur within the battery during the charging and discharging process.

R-int equivalent circuit.
According to the equivalent circuit, the current of battery can be expressed as follows


where

where

The open circuit voltage and internal resistance of power battery in charging and discharging mode are related to the SOC. Figure 7(a) shows the correlation between SOC and the open circuit voltage, while Figure 7(b) shows the relationship between the internal resistance in charging and discharging and SOC.
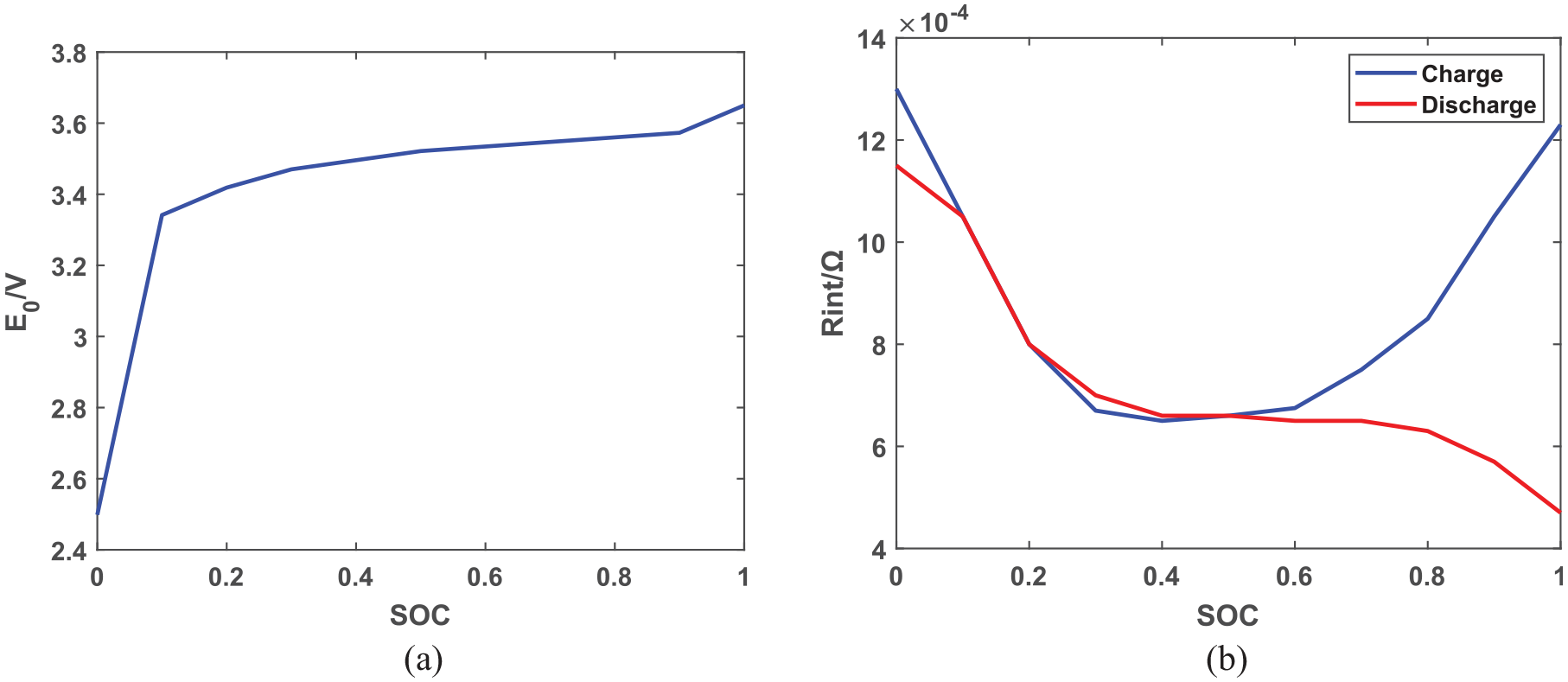
The charging and discharging functions for a single cell: (a) open circuit voltage and (b) internal resistance.
This study focuses on the effect of the battery operating state on the battery whole life cycle. The cycle life model proposed in Wang et al. 50 is used to quantify the battery instantaneous degradation cost.

where

where

where
Energy management strategy
This section first introduces an improved power-following EMS, which can slow down the frequency of change in the output power of the range extender, then introduces an AECMS based on battery SOC, and finally introduces the proposed MOEMS and compares it with the first two strategies.
Rule based energy management strategy
The basic idea of the power following strategy is that the operating point of the engine varies with the SOC of the battery and the load power, which can reduce the battery degradation, but it will result in prolonged operation of the engine in inefficient regions and necessitate frequent starts and stops.
7
To improve the efficiency of engine, we introduce a modification where real-time demand power is replaced with the average demand power. The engine output power is divided into six states based on the battery SOC and average power demand. The detailed rules of the proposed REMS is shown in Table 2.

The rules of REMS.

Some constraint parameters values of EMSs.

Adaptive equivalent consumption management strategy
ECMS 30 equates the battery’s power consumption to fuel consumption by equivalent factor, plus the actual fuel consumption of the engine to get equivalent fuel consumption, and then solves the optimization problem of minimizing the equivalent fuel consumption rate to obtain the optimal control variables.
Ignoring the energy consumption of the other electric appliances, the equivalent fuel consumption rate can be expressed as

where
However, the fixed equivalent factor is difficult to adapt different driving conditions, so the equivalent factor needs to be adjusted in real time. In this paper, the equivalent factor is adjusted through the feedback of the battery SOC, so as to maintain the SOC near the target value. The equivalent factor consists of the initial value and the adaptive term, which can be expressed as

where
Since there is only one design variable, we use the enumeration method to find the approximate global optimum. The design variable is discretized by using a regular grid in the design space, where the grid width is set as 1 kW. The equivalent fuel consumption at these discrete points is calculated, and the smallest equivalent fuel consumption point is selected as the optimal solution.
Multi-objective energy management strategy
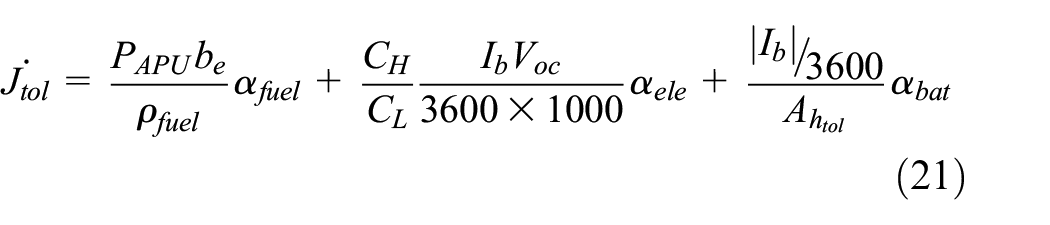
In the instantaneous optimization strategy, we hope to minimize the total cost of vehicle at each instance, the instantaneous operating cost of the vehicle encompasses factors such as fuel consumption, electricity consumption, and battery degradation. From the description in the second part of this paper, the objective function can be expressed as:

The optimization model for the MOEMS is constructed by taking into account various physical constraints. These constraints include the range of APU output power, the permissible variation in battery SOC, as well as limits on the maximum speed and torque of the driving motor. The optimization model is presented below:

In equation (20), the battery SOC is controlled within its allowed limits by a constraint. Here two coefficients are introduced into the objective function to control the SOC, which deletes the constraint of SOC. The modified objective function is defined as
where the two coefficients


The two coefficients changing with battery SOC.
The modified optimization model is expressed by following equation.

The solution of equation (23) often leads to substantial change for the engine output power within two steps which will causes a great burden on engine according to the optimal operating curve shown in Figure 5, so another penalty coefficient is introduced to make the engine output power change smoothly alongside the optimal operating curve, defined as

where
The starting process of the engine generates a large amount of fuel consumption, so frequent start-stop will lead to poor fuel economy. Matsuura M et al. 52 conducted a test on a 1.5 T inline four-cylinder engine and measured that the fuel consumption generated by one start was 1.1–1.2 ml. The engine start cost is added to the objective function to reduce the number of engine start-stop, which can be expressed as


where

Compared with the AECMS, MOEMS comprehensively considers engine fuel consumption cost, electricity consumption cost, battery degradation cost, and engine starting cost, thus it performs well in reducing the vehicle total cost. MOEMS has four coefficients, where
Simulation and discussion
WLTC is the Worldwide Harmonized Light Vehicles Test Cycle, which simulates four different working conditions of urban, suburban, rural, and highway. CLTC is the China Light Vehicle Test Cycle, which includes urban, suburban, and highway conditions, and it is more in line with the real situation of cars driving on Chinese roads. The research object of this paper is range extend electric vehicle, which belongs to the light-duty vehicles, so this section adopts the WLTC and CLTC driving cycles to simulate and compare the four strategies of DP, REMS, AECMS, and MOEMS.
To analyze the performance of MOEMS, this section compares MOEMS with DP and other two strategies aforementioned in last section. We use the total cost during the whole journey as the evaluation index to compare the economy performance.

where
To compare variation of APU output power, the APU output power variation is proposed, defined as

Comparation of EMSs under WLTC driving cycles
Due to the large capacity of the battery, one driving cycle cannot take full advantage of the capability of battery, so 10 repeated driving cycles are used to compare the economic performance of different EMSs. The speed profile of the WLTC driving cycle is shown in Figure 9. In this research, the trial-and-error method is used to select the control parameters of different strategies. For REMS, we set the following time
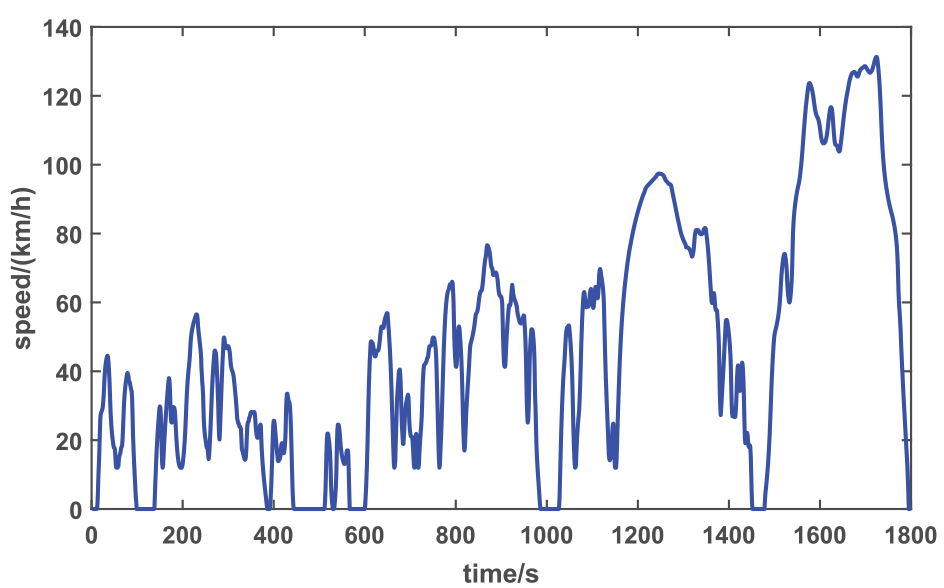
The speed profile of WLTC driving cycle.
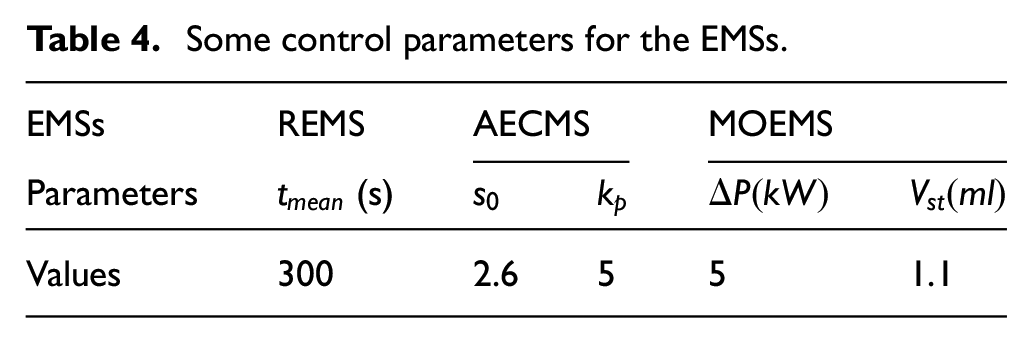
Some control parameters for the EMSs.
The variation of battery SOC under different EMSs are shown in Figure 10, which demonstrates that all EMSs effectively maintain the battery SOC within the allowed range, verifying the feasibility of the proposed EMSs. Notably, REMS exhibits the widest range of variation in battery SOC. This can be attributed to the APU output power closely following the average demand power, which remains constant over the given following time 300 s. The changing range of battery is relatively similar for DP, AECMS, and MOEMS.

Variation of battery SOC under WLTC driving cycle.
The APU output profile under the first WLTC driving cycle is shown in Figure 11. It can be seen that the APU output power of MOEMS is similar to the optimal consequence produced by DP. For AECMS, the APU output power remains fixed at 0 and 20 kW most of the time. When demand power is high, the APU increases its output power to 35 kW. For REMS, the variation of APU output power occurs more smoothly, which indicates that the degradation of the power battery will be faster.

The APU output power profile under WLTC driving cycle.
The total cost and PV values for different EMSs are shown in Table 5. It can be seen that DP as a global optimization method has the least total cost 137.2 CNY, while MOEMS costs 138.4 CNY which is quite close to DP, which suggests that the proposed MOEMS can attain the similar fuel economy once the control parameters have been optimized for the specific driving cycle. Compared with AECMS 152.2 CNY and REMS 204.3 CNY, the total cost of MOEMS is reduced by 9.1%, 32.3% respectively. The PV value for REMS is notably lower at 0.5687 compared to the other three EMSs. This significant difference in PV values can be primarily attributed to the operational approach of REMS, where the APU output power is determined based on the average demand power over a 300 s interval, augmented by a small increment associated with battery SOC. MOEMS records an PV of 4.564 kW which represents a little increase in APU output power variation compared to DP that has an PV value of 4.073 kW, but it is lower than that of AECMS, which has an PV value of 4.953 kW. It confirms that the proposed MOEMS effectively mitigates the variation in APU output power.
Simulation results under different driving cycles.

The computational time for simulating the 10 repeated driving cycles of REMS, AECMS, and MOEMS is just 10 s using MATLAB/Simulink software on a computer with a 3.60 GHz CPU and 16GB RAM. This indicates that the proposed EMSs are capable of real-time control. However, the single driving cycle of DP took over 2 h on a workstation with a 4.3 GHz CPU and 512GB RAM using the same software.
Comparation of EMSs under CLTC driving cycles
The speed profile of the CLTC driving cycle is shown in Figure 12. Given the similarity between the speed profile of the CLTC and the WLTC driving cycles, all the control parameters of EMSs are still based on the values shown in Table 4. The variation of batter SOC is visually represented in Figure 13, which demonstrates that all EMSs successfully maintain the battery SOC within the permissible range, even when utilizing the same parameters as those employed for the WLTC driving cycle. The results indicate that when confronted with different driving cycles, the proposed MOEMS can effectively ensure that the battery SOC remains within the allowed range.

The speed profile of CLTC driving cycle.

Variation of battery SOC under CLTC driving cycle.
The APU output power profile under the first CLTC driving cycle is shown in Figure 14. MOEMS maintains a similar APU output power profile to DP despite in different driving conditions. In contrast, REMS and AECMS exhibit smoother changes in the APU output power curve, indicating greater battery degradation. The total cost and PV for different EMSs are shown in Table 5. DP has the least total cost 79.49 CNY, followed with the MOEMS 83.36 CNY. AECMS incurs a higher total cost, surpassing MOEMS by 7.16 CNY, while REMS exhibits the highest total cost increase of 38.74 CNY compared to MOEMS. This demonstrates that DP has the best economy performance, followed by MOEMS, while REMS incurs the highest total cost among the considered EMSs for the CLTC driving cycle. For the PV of engine output power, MOEMS has similar performance to DP within 2.8% difference, while AECMS increase 12.2% compared to MOEMS. In summary, the proposed MOEMS has the better performance compared to the AECMS.

The APU output power profile under CLTC driving cycle.
Comparation of EMSs under multiple driving cycles
In the actual driving conditions, the speed profile of driving cycle cannot be accurate, and in most cases, there exist significant difference between the actual speed and the ideal speed. The performance of many strategies will be seriously affected when the driving condition has a great change, so it is necessary to test the adaptivity of proposed MOEMS. The driving cycles of UUDS, LA92 and HWFET represent urban, suburban and highway driving conditions respectively, so we combine the three driving cycles successively into a multiple driving cycle to compare the performance of different EMSs. The speed profile of multiple driving cycle is shown in Figure 15. The multiple driving cycle is repeated for five times, and the battery SOC variation is shown in Figure 16 by using the same control parameters shown in Table 4. As can be seen from the Figure 16 that the battery SOC of MOEMS starts to fluctuate around 0.288 after 3600 s, which demonstrate that MOEMS can adapt to different driving conditions.

The speed profile of multiple driving cycle.

Variation of battery SOC under multiple driving cycle.
The APU output power profiles during the first multiple driving cycle is shown in Figure 17. MOEMS maintains similar APU output power profile under multiple driving cycles, which demonstrate that the proposed MOEMS can adapt to different driving conditions. The total cost and engine PV are shown in Table 5. DP has the least total cost 126.1 CNY, and the MOEMS has a quite similar total cost 130.3 CNY. Compared with AECMS and REMS, the total cost of MOEMS is reduced by 11.4 CNY and 43.2 CNY respectively. It indicates that under uncertain driving cycles, MOEMS can exhibit fuel economy similar to DP without altering its control parameters and outperforms AECMS and REMS. Except the REMS, DP has the minimum PV with 5.876 kW, followed by MOEMS with 6.597 kW. The PV of AECMS is 6.718 kW which is the maximum of the four EMSs. It can be seen that the proposed MOEMS can significantly mitigate the variation in APU output power without increasing the total cost under the uncertain driving cycles.

The APU output power profiles under multiple driving cycle.
The cost curves for four components under multiple driving cycles are shown in Figure 18. The engine startup cost of MOEMS is larger than other EMSs, but it takes up a relatively low proportion of the total operational cost. The electricity consumption cost for the four strategies depicted in the figure exhibits fluctuations around zero. As time progresses, it becomes evident that the battery degradation cost of REMS significantly surpasses that of the other three strategies, followed with the ACEMS, whereas the battery degradation costs of MOEMS and DP are remarkably similar. This suggests that the MOEMS, as proposed in this paper, has the potential to deliver performance comparable to that of DP in mitigating battery degradation costs.

The cost of four components under multiple driving cycles.
The cost of four components under different driving cycles are summarized in Figure 19. This figure demonstrates that the REMS produces the highest fuel cost, while the AECMS has the lowest fuel cost, and MOEMS has close fuel cost to DP. For the battery degradation costs, REMS still incurs the highest expenses, followed by AECMS. In comparison, MOEMS and DP exhibit notably lower battery degradation costs, with MOEMS and DP being quite similar in this regard. Given the paper’s emphasis on EMSs during the CS phase, electricity consumption costs are uniformly modest for all EMSs. While the engine start-stop cost of MOEMS is higher than that of REMS and AECMS, but this part takes up much lower proportion compared to the battery degradation cost. As a result, MOEMS remains a more cost-effective choice overall when compared to REMS and AECMS.

The cost of four components under different driving cycles.
Conclusion
Addressing the intricate energy management challenges inherent in REEVs, this study introduces a novel solution called multi-objective energy management system (MOEMS). Compared to the traditional AECMS, the proposed MOEMS adds battery degradation cost and actual fuel consumption during engine start-up to the objective function to reduce battery degradation and avoid frequent engine start-stop respectively. MOEMS is devised with the primary goals of reducing the total operational cost of the vehicle, including the fuel cost and battery degradation cost. The fuel consumption, electricity consumption, and battery degradation are weighted to the total instantaneous operating cost of the vehicle according to their unit price. Two coefficients are used to maintain the SOC of the battery in the given interval instead of the equivalent factor in AECMS. At the same time, the cost of engine start-stop is added to the objective function to avoid frequent engine start-stop. In different operating conditions (CLTC driving cycle, WLTC driving cycle, multiple driving cycle), compared with AECMS and REMS, MOEMS can effectively reduce the total operating cost of the vehicle and slow the variation of engine output power which has the similar performance to DP. The research can provide some references for the development of energy management strategies and controllers for extended range electric vehicles in order to improve the fuel economy. The proposed strategy in this paper does not consider the engine dynamic response, and in real-world scenarios, the engine response speed may affect the performance of the proposed MOEMS. This paper mainly focuses on the validation of the proposed strategy by means of simulation, and in the subsequent work, the strategy will be tested by hardware-in-the-loop, in order to further validate the proposed strategy.
Footnotes
Handling Editor: Sharmili Pandian
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported in part by National Natural Science Foundation of China (12272142), and Fundamental Research Funds for the Central Universities (2172021XXJS048).