
Abstract
Taking the ball screw feed system as the research object, the two degree of freedom axial dynamic model of the system is constructed firstly. Based on Hertz contact theory, when the ball screw pair adopts variable lead self-preloading to eliminate the assembly clearance between the ball and raceway, considering the nonlinear segmented axial elastic recovery force generated by the uneven contact deformation between the ball and raceway under the action of external excitation force, further derive the nonlinear dynamic equation group of the system. Next, the fourth-order Runge-Kutta method was used to numerically solve the equation system, obtaining the system’s two and three-dimensional phase diagrams, Poincaré sections, time-domain waveform diagrams, frequency spectra, and bifurcation diagrams. Then, the effects of damping constant, initial contact angle between ball and raceway in ball screw pairs, and number of balls on the system’s response characteristics were analyzed, and the influence of external excitation forces on system stability was further studied. Finally, it was verified through experiments that the axial vibration of the system is indeed nonlinear vibration, providing a theoretical basis for the study of the dynamic characteristics of the ball screw feed system.
Introduction
The ball screw feed system as an important component of CNC machine tools, its performance will directly affect the working performance and machining accuracy of CNC machine tools. 1 Under normal conditions, there are inevitable problems such as friction and clearance of ball screw pairs after assembly. Due to the influence of the different rigidity of various components and preloading force in the system, when the system is subjected to external excitation, nonlinear elastic recovery force will inevitably occur inside the system. If nonlinear factors are ignored, it will lead to a large deviation between the research results and the actual situation, which cannot accurately reflect the vibration characteristics of the system. Therefore, a comprehensive analysis of assembly errors, the influence of preloading force, and the dynamic characteristics under external excitation force can not only accurately reflect the vibration state of the system, but also benefit the research on vibration control of CNC machine tools and the improvement of machining performance.
In the field of nonlinear vibration research on ball screw feed system, Yang et al. 2 considered the lateral shear force acting on the ball screw based on Timoshenko beam theory, and thus constructed a nonlinear dynamic model. It was found that there is a certain degree of nonlinearity and coupling characteristics in the modal vibrations of the ball screw itself in various orders and directions, and the forced vibration Duffing equation can be used to represent its lateral vibration. Wang et al. 3 focused on studying the nonlinear spring and friction force that affect the vibration characteristics of workbench. It was found that the damping Duffin equation can be used to describe the effect of nonlinear spring force on the vibration characteristics, and the van der Waals equation can be used to describe the effect of nonlinear friction on the vibration characteristics. The coupling effect of these two nonlinear forces on the vibration characteristics of the system can be described by the Lienard equation. Zeng et al. 4 simplified the ball screw as a Timoshenko beam, established the motion differential equation and axial vibration equation of the ball screw, studied the influence of screw length, excitation force, and damping coefficient on vibration, and obtained the phase trajectory diagram and Poincaré section of axial vibration to analyze the stability and periodicity of axial vibration. Chen et al. 5 established a new dynamic model for the contact force of each rolling element considering preload, nonlinear Hertz contact deformation, and recirculation mechanism to improve the vibration problem caused by the increase of ball screw speed, and studied the nonlinear dynamic behavior of the ball screw.
Gu and Zhang 6 considered the contact state of nonlinear motion joint surfaces and established a single degree of freedom dynamic model for a single nut dual cycle ball screw feed system. The axial deformation and stress of key components were calculated, and a segmented nonlinear restoring force function for system displacement and workbench position was established. Analyzed the variation of the contact stiffness of the motion joint surface and the system transmission stiffness under different boundary conditions. In addition, discussed the influence of system mass and external excitation force on the dynamic characteristics of the system. Zhou et al. 7 proposed a new load distribution model, and the critical axial load of a double nut ball screw pair with additional elastic elements can be obtained. Liu et al. 8 proposed a five-degree-of-freedom dynamic model for a variable lead preloaded single nut ball screw feed system. The model considers the effects of excitation amplitude, deflection angle, number of balls, and preload. By changing the structural parameter, different bifurcation diagrams, three-dimensional spectrum diagrams, phase diagrams, and Poincaré sections were obtained. It has shown that the system exhibits different motion states and can observe continuous frequency components. Zou et al. 9 developed a lumped parameter model with the variable coefficients to evaluate the vibration characteristics of a vertical ball screw feed system under the influence of screw-nut contact stiffness. This model considers the contact stiffness of screw-nut in different ways. By comparing the differences in predicting the dynamic characteristics of the system among different models, it is revealed that the contact stiffness of screw-nut greatly affects the vibration behavior of the spindle system in the driving direction.
Wang et al. 10 established a multi degree of freedom model to study the vibration characteristics of a feed system with nonlinear motion joints. The contact force of the ball is a piecewise smooth function of the displacement of a multi degree of freedom system. The motion equation of the system was derived to evaluate the effects of excitation force and nut position on the amplitude and stable state of the vibration system. As the position of the nut changes, there is a jumping phenomenon of displacement and deformation amplitude near the resonance frequency range. Wang et al. 11 developed a new flexible tool-workpiece system for studying nonlinear dynamics and chatter stability during turning processes. The segmented nonlinear recovery function of the tool system was derived by calculating the axial deformation and force of the ball screw. Analyzed the variation of cutting system with time delay, and its dynamic behavior is manifested as periodic motion, quasi-periodic motion, and chaotic motion. Liu et al. 12 established a 14 degree of freedom dynamic model of the feed system by deriving the nonlinear restoring force function of nuts, linear guides, and ball bearings, as well as the stiffness of the screw shaft. The influence of excitation amplitude and assembly error on the dynamic characteristics of the feed system was discussed, indicating that assembly error affects the nonlinear dynamic characteristics of the feed system. Miao et al. 13 considered the nonlinear characteristics of motion joints and proposed a comprehensive dynamic model of a column-axis system. Derived the nonlinear restoring force of the motion joint as a function of the corresponding vibration displacement. The centralized mass method was used to model the ball screw feed system, and the proposed dynamic model was validated through static load tests, modal impact tests, and vibration response tests. In the dynamic model proposed by Liu et al., 14 the assembly error of the system is considered as the deviation angle around the geometric center of the spiral axis. The motion of the system at each point was explained through displacement waveforms, spectra, phase diagrams, and Poincaré sections. In the bifurcation diagram and three-dimensional spectrum, the influence of excitation amplitude and assembly error was discussed with excitation amplitude, deflection angle, and excitation frequency as control parameters. Xu et al. 15 established a comprehensive dynamic model of a ball screw feed system considering nonlinear motion joints and studied the dynamic characteristics of the workbench under combined loads in six directions. The nonlinear restoring force functions of each node under coupled displacement were calculated. Based on the concentrated mass method, a multi degree of freedom dynamic analytical equation was established by analyzing the interaction forces between joints.
In summary, most scholars have not considered the influence of assembly clearance in ball screw pairs and the contact deformation between ball and raceway during preloading on the dynamic characteristics of the system when modeling. At the same time, they have ignored the influence of changes in parameters such as contact angle and damping constant on the system response characteristics. There is also limited research on the influence of external excitation forces on system stability. Therefore, based on the centralized mass modeling method, this article first constructs a two degree of freedom axial dynamic model of the ball screw feed system, considers the nonlinear segmented elastic recovery force generated by the variable lead preloading of the ball screw pair to eliminate assembly clearance, and derives the nonlinear dynamic equations of the system. On this basis, the influence of damping constant, initial contact angle between ball and raceway in ball screw pair, and number of balls on system response characteristics is analyzed, and further research is conducted on the influence of external excitation force on system stability. Finally, it was verified through experiments that the axial vibration of the system is indeed nonlinear vibration.
Dynamics analysis
Establishment of kinetic model
As shown in Figure 1, the ball screw feed system is mainly composed of servo motor, coupling, support bearing, ball screw pair, and workbench. The ball screw and the workbench are both considered as rigid components, and the screw is installed with one end fixed and one end supported. The connection system among the components is considered as a “mass-spring-damping” system. When conducting the mechanical modeling in this article, the following assumptions are first introduced:
(1) Study contact deformation within the elastic deformation range.
(2) Neglecting the influence of centrifugal force.
(3) The system is a linear damping system.

Ball screw feed system model.
In summary, by simplifying the axial components of the system and using the concentrated mass method, the axial dynamics model of the system can be obtained, as shown in Figure 2, c denotes the damping constant, ms and mn denote the masses of the ball screw and workbench respectively.

The axial dynamics model of feed system.
In Figure 2, the tensile stiffness Ksl of the ball screw and its torsional stiffness Ksn together form its axial stiffness

Where d denotes the nominal diameter of the ball screw, xs is the distance of the workbench from the motor end. G and E represent shear modulus and Young’s modulus, respectively. p denotes the lead of ball-screw shaft.
Elastic recovery force of ball screw pair
According to Hertz contact theory, whenever a rolling body is deformed, there must be a nonlinear relationship between the contact deformation of the rolling body and the contact force.
16
Therefore, the ball screw pair is subjected to preload and external excitation, which must produce a nonlinear recovery force Fn. Since the assembly clearance between the ball and the raceway inevitably exists during the assembly of the single-nut ball screw pair, this clearance should be eliminated as much as possible to improve the working performance of the ball screw pair, so it is necessary to use the method of variable lead self-preload to preload the ball screw pair. The main step is to set an abrupt change in the middle of the threaded race of one lead of the screw and nut, so that the ball in the screw and nut can produce a certain axial misalignment after the assembly, which can complete the self-preload and eliminate the clearance. As shown in Figure 3, since the ball screw is in the state of self-preload, the balls in the left and right parts of the nut are subjected to the normal load Pl and Pr respectively. P0 indicates the variable lead of the nut. Because the nut in the ball screw pair is connected to the workbench through the flange structure, the workbench is also subjected to the axial excitation force
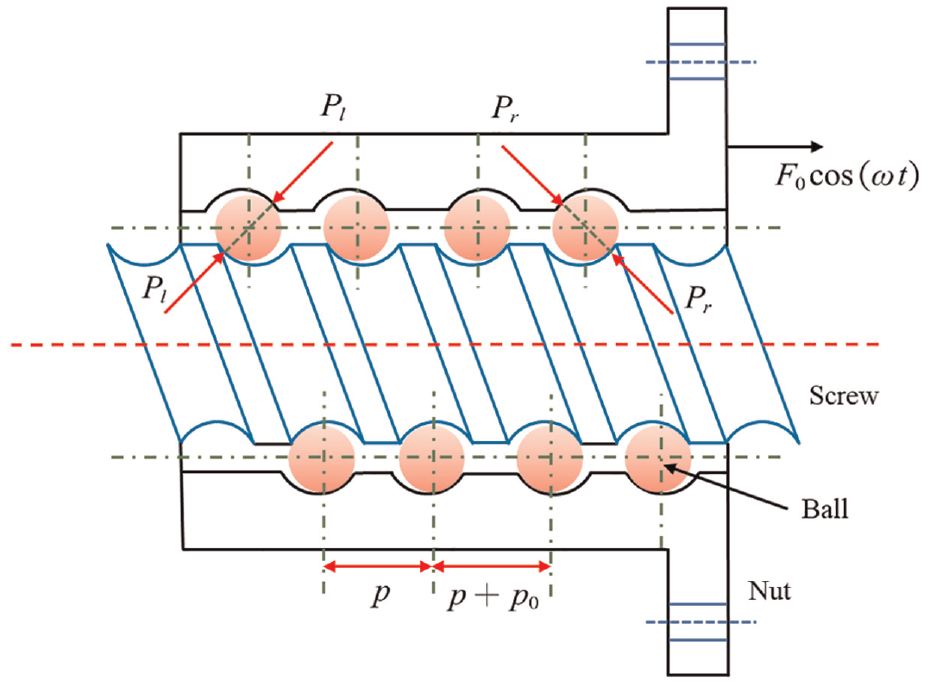
Ball screw pair in preload condition.
As shown in Figure 4, the ball is deformed elastically when it is subjected to external load in the middle of the nut raceway and the screw raceway. rs represents the curvature radius of the groove of the screw raceway, rn represents the curvature radius of the groove of the nut raceway, and rb represents the radius of the ball before it is deformed. Therefore, according to Figure 4, the initial distance A0 between the curvature center of the groove of the screw raceway and the curvature center of the groove of the nut raceway is:


Schematic diagram of local contact between the ball and the raceway.
Because of the involvement of preload, the initial deformation of the ball is expressed by

where
As shown in Figure 5, Figure 5(a) shows ball deformation under the preload force, and Figure 5(b) shows the change in the position of the curvature center of the raceway groove under the external load. In the Figure 5,

Schematic diagram of deformation of ball screw pair.
In summary, the distance A1 in Figure 5(b) needs to be divided into two parts, left and right, respectively:
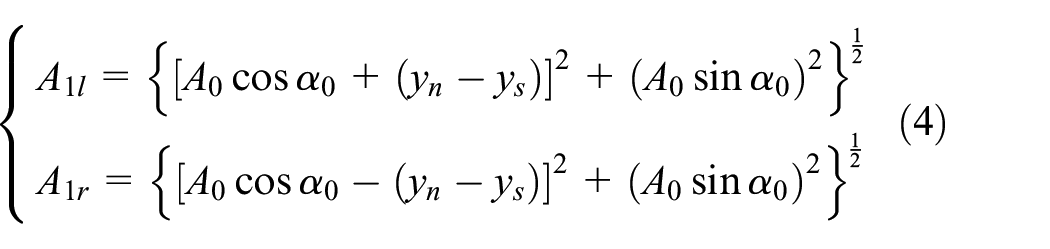
Similarly, the contact angles of the individual ball in the left and right parts of the ball screw pair are expressed as:

The i and j in equation (5) denote the number of balls in the left and right parts of the ball screw pair, and the axial elastic recovery force of the ball screw pair due to the elastic deformation of the individual ball in the left and right parts can be further obtained according to Hertz contact theory 17 as follows:

In equation (6), Kh denotes the Hertz contact stiffness between the ball and the raceway in the ball screw pair, which is related to the geometric parameters of the ball screw pair and the characteristic parameters of the material. Because the initial displacement of the ball screw pair is relatively small when subjected to axial load, the axial nonlinear elastic recovery force 8 generated by the ball screw pair in Figure 2 is:

System of nonlinear dynamical equations
According to Newton’s second law, the axial force analysis of the ball screw feed system in Figure 2 is:

As shown in equation (7), the restoring force generated by the ball screw pair after being subjected to external load is a segmental nonlinear function, so equation (8) are the second-order constant coefficient nonlinear non-simultaneous coupled differential equations. However, due to the different nature and measurement unit of the coefficients in the above equations, their integrality is often inadequate. When there is a big difference among the benchmarks of the coefficients in the equations, if the simulation analysis is solved directly, the coefficients with higher values will have a prominent advantage over the coefficients with lower levels of values in the overall analysis, so that the coefficients cannot participate in the arithmetic analysis with the same benchmark. 18 To solve this problem, it is necessary to dimensionless the values of the coefficients in the above equations by introducing dimensionless parameters as:

Where l represents the length of the ball screw,

The axial dimensionless dynamics equations of the system are:

The dimensionless parameters

Finally, by substituting equation (12) into equation (11), equation (11) becomes:

In order to save time for the simulation calculations later, the dimensionless vector

Numerical simulation analysis
Characterization of the axial nonlinear vibration response of the system
Effect of damping constants on response characteristics
The initial values of the dimensionless displacement and velocity in equation (14) are 0 and
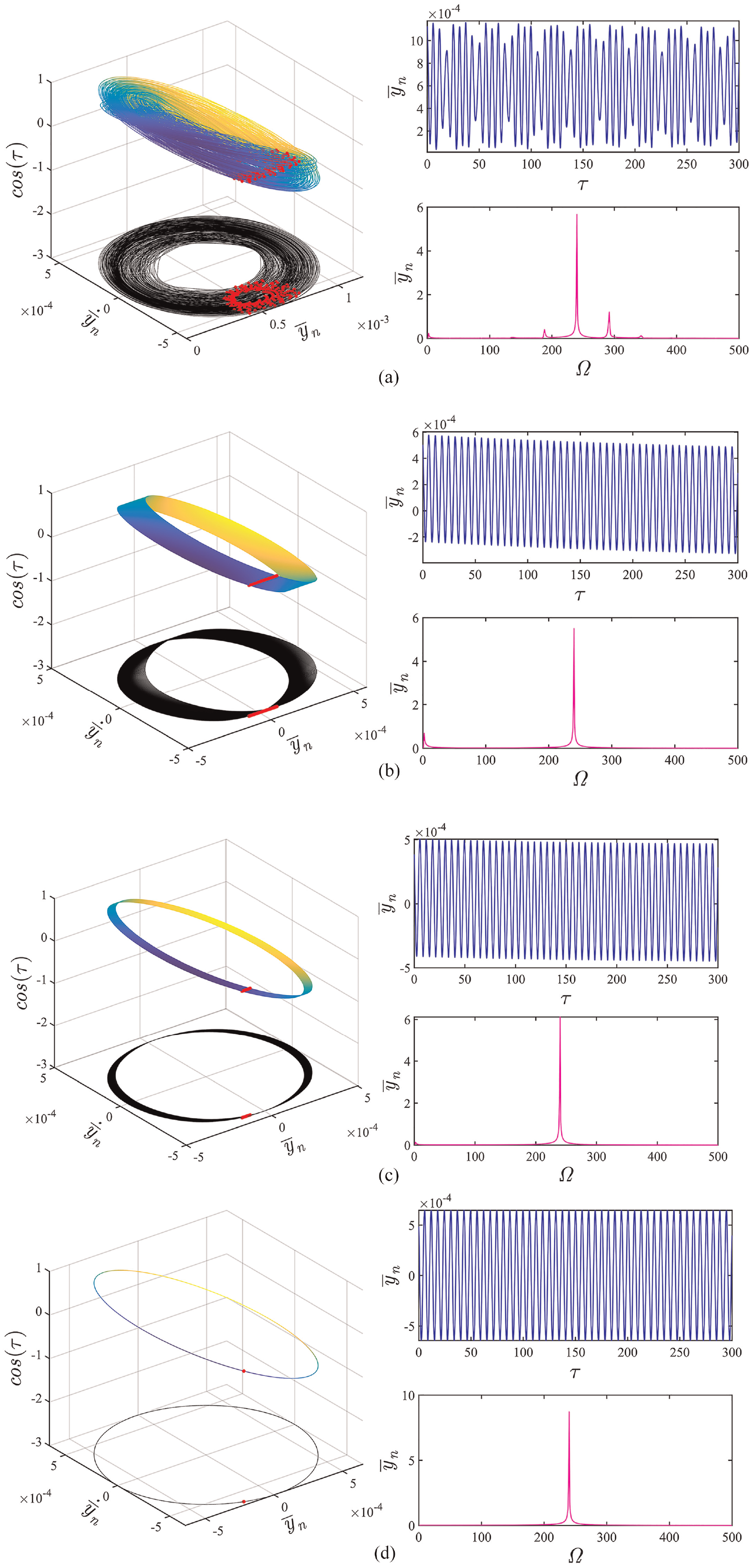
Nonlinear response characteristics of axial vibration of the workbench with different damping constants: (a) c = 50Ns/m, (b) c = 100Ns/m, (c) c = 250Ns/m, and (d) c = 1Ns/m.

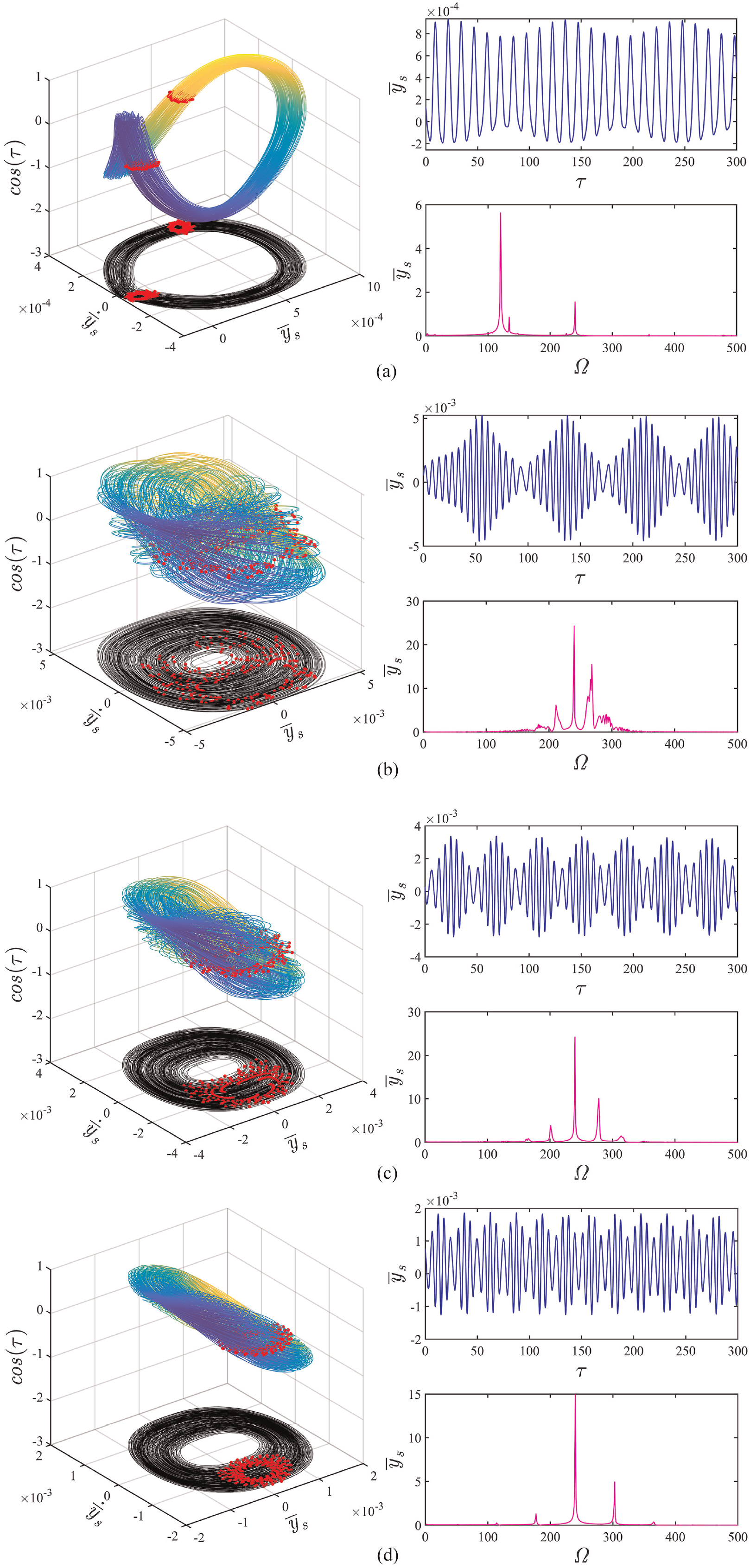
Nonlinear response characteristics of axial vibration of the ball screw with different damping constants: (a) c = 1Ns/m, (b) c = 50Ns/m, (c) c = 100Ns/m, and (d) c = 250Ns/m.
As shown in Figures 6 and 7, when the damping constant is
Effect of initial contact angle of ball and raceway on response characteristics
Keeping the above initial conditions unchanged, the external excitation force amplitude F0 is set to 1500 N, the excitation frequency

Effect of initial contact angle between ball and raceway on the axial nonlinear response characteristics of the workbench: (a) α0=30°, (b) α0=45°, (c) α0=50°, and (d) α0=60°.

Effect of initial contact angle between ball and raceway on the axial nonlinear response characteristics of the ball screw: (a) α0=30°, (b) α0=45°, (c) α0=50°, and (d) α0=60°.
As shown in Figures 8 and 9, under the above conditions, when the initial contact angles between ball and raceway are
Effect of the number of balls on the response characteristics
The initial conditions above are kept unchanged, and the external excitation force amplitude F0 is set to 1000 N, the excitation frequency

Effect of number of balls on the axial nonlinear response characteristics of the workbench: (a) Nn = 20, (b) Nn = 46, (c) Nn = 70, and (d) Nn = 120.
Effect of the number of balls on the axial nonlinear response characteristics of the ball screw: (a) Nn = 20, (b) Nn = 46, (c) Nn = 70, and (d) Nn = 120.
As shown in Figures 10 and 11, under the above conditions, when the number of balls in the ball screw pair increases from 20 to 120, the periodicity of axial vibration of the workbench and the ball screw does not change, and both are chaotic motion. According to the analysis in the previous section, when the number of balls increases from 20 to 46, because the increase of the number of balls enhances the axial nonlinear recovery force, the chaotic motion of axial vibration of the workbench and the ball screw is enhanced and the stability of axial vibration is deteriorated. When the number of balls increases from 70 to 120, the chaotic motion of axial vibration of the workbench and the ball screw is weakened and the stability of axial vibration is getting better. This is because the increase of the number of balls increases the axial load capacity of the ball screw, which enhances the axial stiffness of the system. In engineering practice, the number of balls in ball screw pair is generally less than 150, the designer can try to take more balls in this range to improve the stability of axial vibration of ball screw feed system.
Stability analysis of axial nonlinear vibration
The influence of external excitation amplitude on system stability under different workbench masses
Chaotic motion is a random behavior with irregular and unpredictable response and always finite response boundaries. 4 During the study of nonlinear dynamics, chaotic phenomena are important elements to be concerned with, and designers should try to avoid the areas where chaos is likely to arise in order to increase the stability of the system during the design phase. The study in the previous section found that the nonlinear response characteristics of axial vibration of the ball screw feed system will definitely change when the specific parameters change. The vibration of ball screw feed system is a time-varying vibration, and the change of mass and position of workbench will affect the vibration characteristics of the whole system, 19 but the position of workbench mainly affects the lateral vibration and the rotation vibration around the lateral axis. Therefore, in order to study the axial nonlinear vibration characteristics of the system under external excitation, this section sets the control parameter as the mass of workbench and uses the Bifurcation diagram to simulate and analyze the chaotic phenomenon, so as to study the stability of axial nonlinear vibration of the ball screw system.
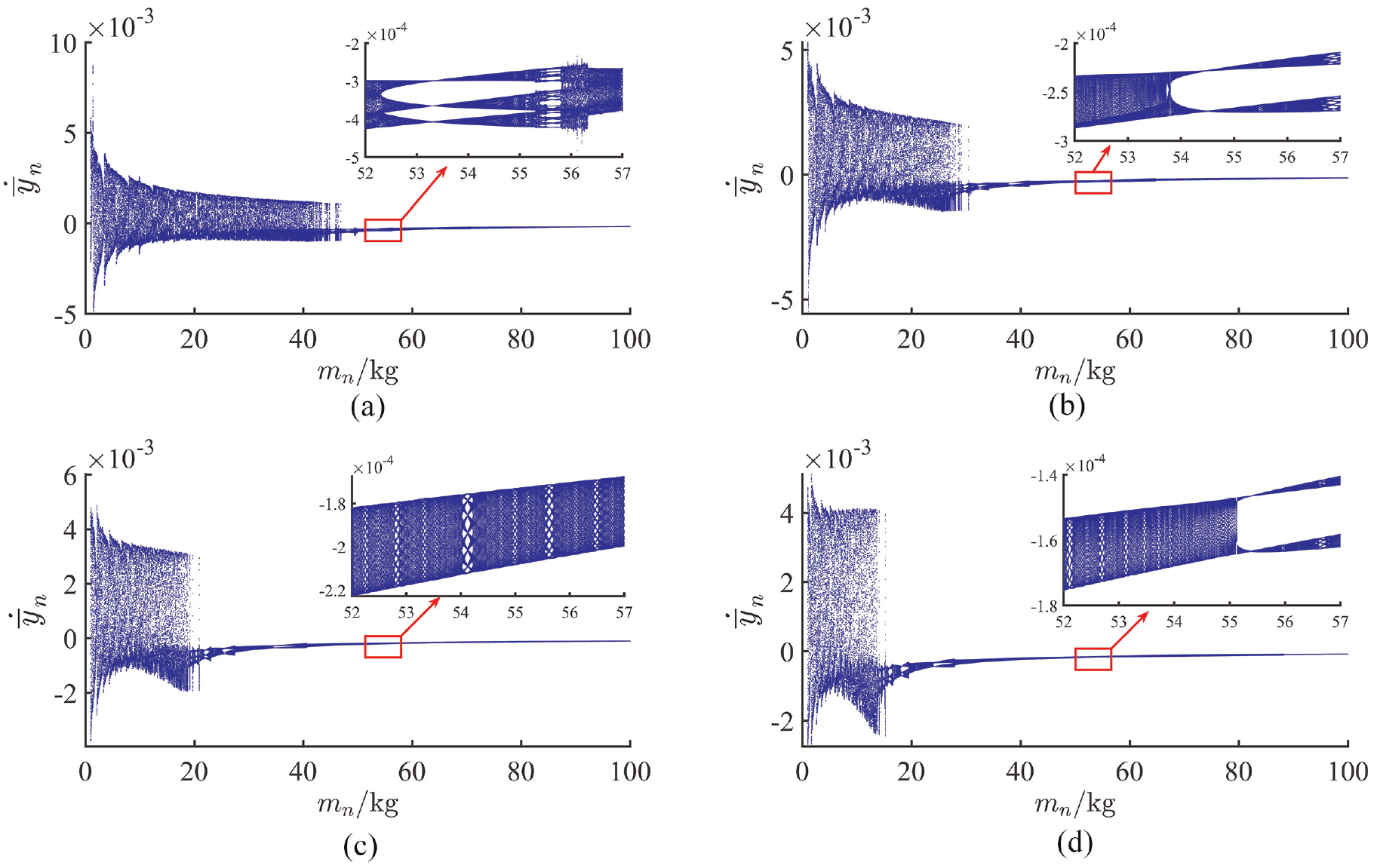
In this section, the same initial conditions as in section “The influence of external excitation amplitude on system stability under different workbench masses” are maintained, and the workbench is also placed in the middle of the ball screw, the control parameter

Bifurcation diagram of vibration response of the workbench with the mass of workbench at different amplitude of external excitation force: (a)

Bifurcation diagram of vibration response of the ball screw with the mass of workbench at different amplitude of external excitation force: (a)
The influence of external excitation frequency on system stability under different workbench masses
Keeping the same initial conditions and setting the amplitude F0 of external excitation force to 500 N, the stability of axial nonlinear vibration of the workbench and the screw is studied when the frequency
Bifurcation diagram of vibration response of the workbench with the mass of workbench at different frequencies of external excitation force: (a)
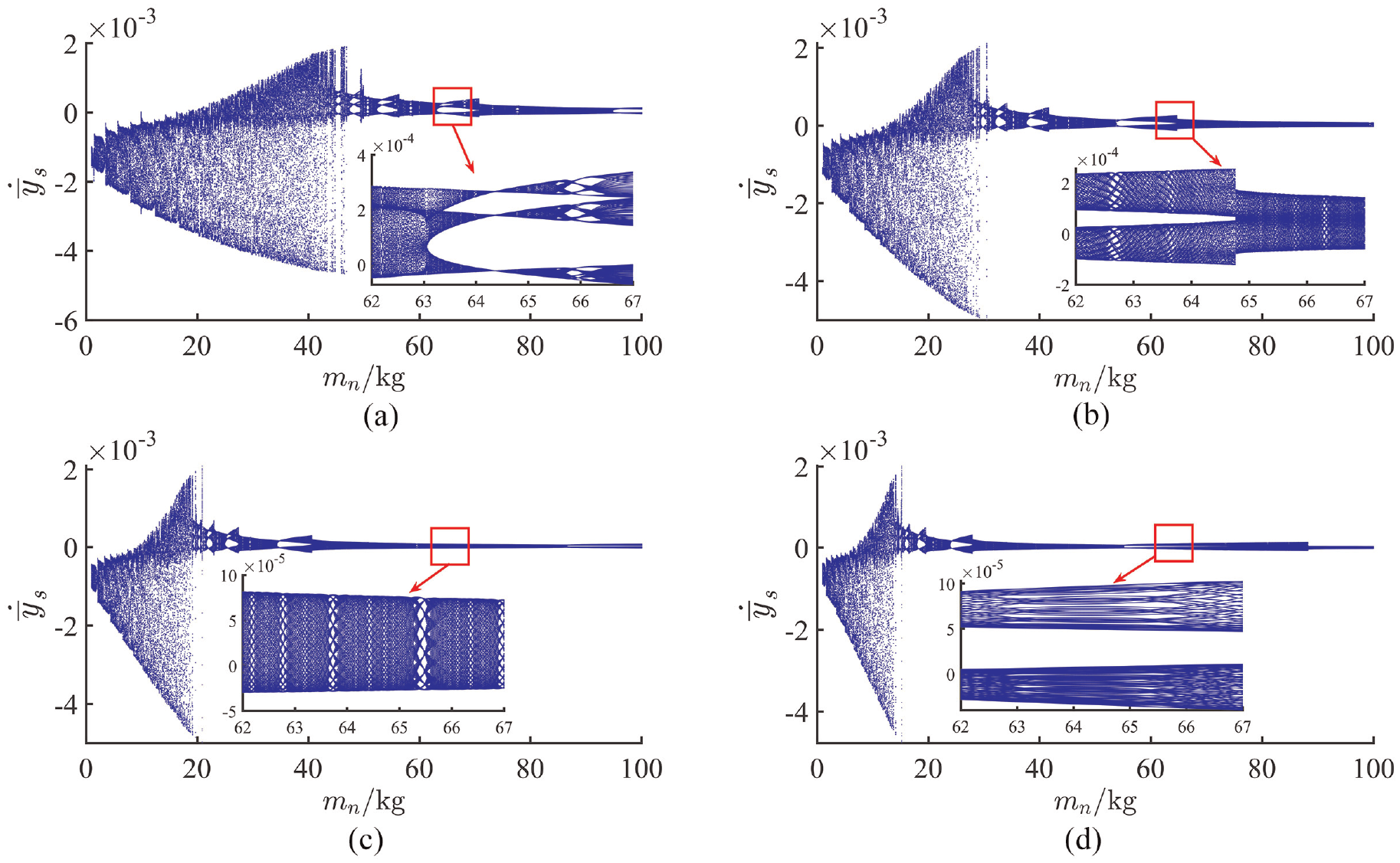
Bifurcation diagram of vibration response of the ball screw with the mass of workbench at different frequencies of external excitation force: (a)
Analysis of simulation results
By analyzing Figures 12 to 15, it can be observed that
(1) In the bifurcation diagram of the response of axial nonlinear vibration of the workbench and the ball screw, the different control parameters and external excitation force make the vibration states include multi-periodic motion, proposed-periodic motion, and chaotic motion, which correspond to the multi-track line region, vertical continuous region, and chaotic region in the bifurcation diagram, respectively. In addition, the transition among various motion states of axial nonlinear vibration of the system is mainly completed through multi-periodic motion as the mass of the workbench increases.
(2) When the amplitude and frequency of the external excitation are fixed, the stability of axial nonlinear vibration of the system is obviously enhanced as the workbench mass increases from 1 to 100 kg, and the motion state of axial nonlinear vibration of the system starts to change gradually from the chaotic motion to the proposed periodic motion and the periodic motion. In addition, when the amplitude of external excitation force is increased from 9000 to 15,000 N, the chaotic region, which is in the region of small workbench mass, starts to show a trend of backward movement with the increase of the amplitude of external excitation force, which indicates that the increase of the amplitude of external excitation force will weaken the stability of axial nonlinear vibration of the system when the frequency of external excitation force remains constant. On the contrary, when the frequency of external excitation force is increased from 145 to 205 Hz, the chaotic region in the region of larger workbench mass starts to show a trend of forward movement with the increase of the frequency of external excitation force, which indicates that the increase of the frequency of external excitation force will enhance the stability of axial nonlinear vibration of the system when the amplitude of external excitation force remains constant.
Experimental verifications
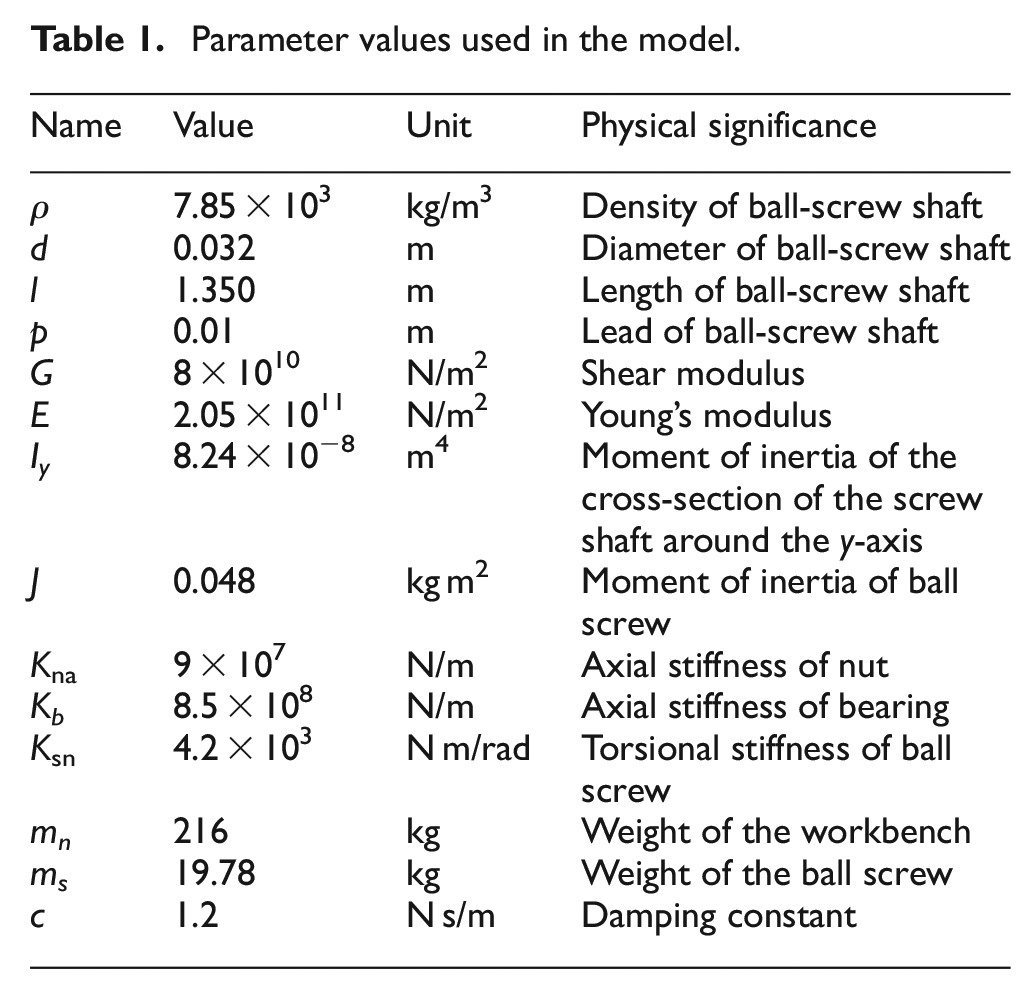
As shown in Figure 16, the experimental verification was carried out using a ball screw feed system experimental platform. The detailed parameters are shown in Table 1. The experimental equipment includes YMCIH-10PE hammer (equipped with force sensor and rubber hammer head), YMC145A100 3-way IEPE acceleration sensor, YMC9216 signal collector, and YMC9800 signal analysis software. Firstly, debug the initial parameters of the YMC9800 signal analysis software, then install the acceleration sensor on the surface of the workbench and along the positive direction of the X-axis, and select the workbench as the tapping point for the hammer, with the direction along the direction of sensor installation. The YMC9216 signal collector is connected in two channels. As the impact signal of the hammer is equivalent to a sweeping pulse signal, it is pounded three times and sampled separately. The average value of the three times is taken for data processing. In order to avoid interference with the experimental results caused by the generation of secondary frequency sweep signals, if a double hit occurs during hammering, it is considered an invalid operation.

Ball screw feeding system test bench.
Parameter values used in the model.
The pulse signals and acceleration signals collected during the experiment were processed using YMC9800 signal analysis software. The anti-mixing filtering frequency was set to 400 Hz, the response sampling frequency was 1500 Hz, the pulse sampling frequency was 6000 Hz, and the time-varying multiple was 4. The acceleration FFT spectrum (amplitude spectrum) in x, y, z directions of the workbench measured by the 3-way acceleration sensor is shown in Figure 17. Table 2 shows the results of the first five natural frequencies obtained through simulation and measurement. The positions of the workbench are 0.5 l.
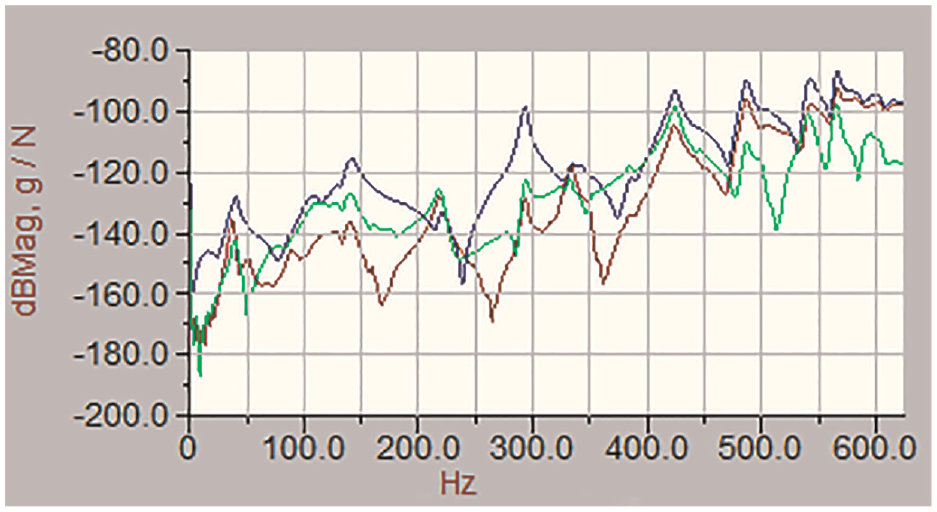
The acceleration FFT spectrum of axial vibration of the workbench.
Comparison of the first five natural frequencies between simulation and measurement.
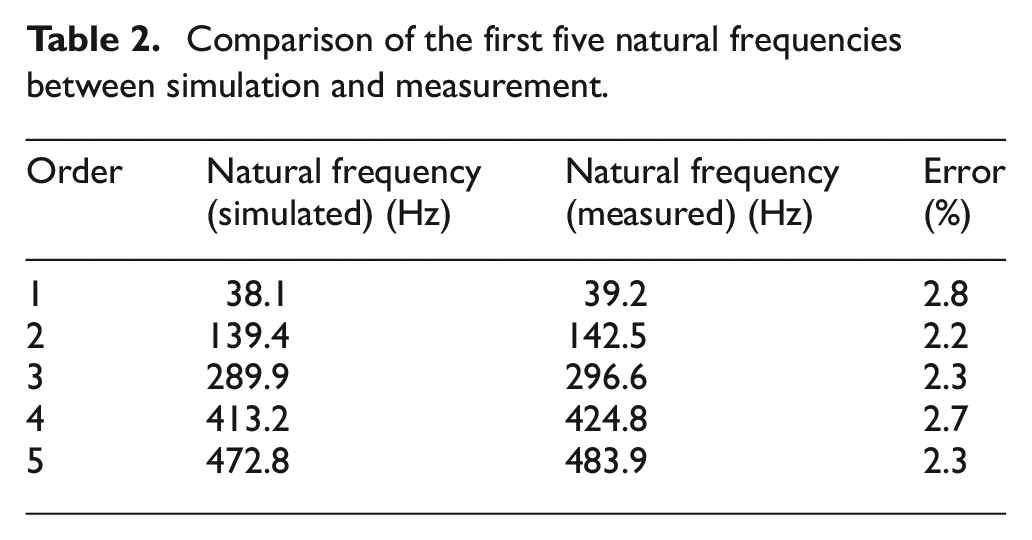
As shown in Figure 17, although the frequency spectrum of the axial vibration of the system is continuous, there are many peaks in the spectrum, which are neither constant nor discrete. It can be found that the axial vibration of the system is indeed nonlinear, and the accuracy of the model established in this paper is verified by the comparison results of modal experiment and simulation data.
Conclusion
(1) The axial elastic recovery force of the ball screw system exhibits a segmented nonlinear form due to the uneven contact deformation between the ball and the raceway. Further numerical analysis reveals that the axial nonlinear vibration of the system includes periodic motion, quasi-periodic motion, and chaotic motion.
(2) Due to the influence of preloading force and external excitation force, parameters such as damping constant, initial contact angle between ball and raceway, and number of balls will all affect the motion state of the axial vibration of the system. Specifically, taking a larger damping constant, a larger number of ball bearings, and a design initial contact angle of 45° will all contribute to a more stable vibration state of the system.
(3) When the bifurcation parameter is set to the mass of the workbench, regardless of the values of the amplitude and frequency of the external excitation force, the axial nonlinear vibration of the system is in a chaotic state when the mass of the workbench is small. Moreover, the chaotic region in the bifurcation diagram exhibits a self-similar nested structure as the mass of the workbench increases.
(4) When the amplitude of the external excitation increases, the chaotic region of the system will increase, causing a decrease in the stability of the axial nonlinear vibration of the system. However, when the frequency of the external excitation increases, the chaotic region of the system will decrease, enhancing the stability of the axial nonlinear vibration of the system. The above conclusions can provide certain theoretical support for the optimization of system parameters.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by the National Natural Science Fund of China (Grant No. 51765039, No. 51965037, and No. 52365057).