
Abstract
The severe vibration of BHA directly affect the drilling efficiency, borehole trajectory, and wellbore quality. Therefore, it is crucial for developing dynamic mechanics of drill string system by studying the mechanical behavior of BHA. In this paper, considering the continuity condition of double-span drill collar, the expression of lateral vibration of drill collars is firstly obtained by using the assumption mode method. Then, the lateral vibration equation of double-span drill collar is derived by Lagrange equation. Finally, a self-programming model is established based on dynamic mechanics of drill string system, the lateral vibration characteristics of double-span drill collar in four different types of BHA is further determined by the fourth-order Runge-Kutta algorithm. It is obviously found that the lateral vibration is enhanced with increasing the length of drill collar; the rotation speed of BHA, weight on bit (WOB), and the size of stabilizer have a significant influence on the lateral vibration of drill collar. In the practical application, the lengths of the first-span and the second-span drill collar are given as 10 and 19 m, respectively; and the stabilizer diameter approached to bit diameter is recommend in practical gas drilling engineering; under WOB of 10–40 kN, the rotation speed of the drilling string should be controlled nearby 60 r/min. The theoretical investigation is a guidance for structure design of BHA and optimization of drilling parameter.
Keywords
Introduction
Air drilling technology is widely applied in exploration and development of oil and gas because of advantages of short drilling cycle and reservoir protection. However, there is no liquid column pressure in the annular space of wellbore to guarantee stability of borehole wall as the borehole wall is eroded by the high-speed compressed gas carrying rock cuttings, which causing severe vibration of the drill string and excessive well deviation. During the drilling process, the drill string will cause serious friction with the borehole wall, in this case, fatigue failure, fracture, sticking of drilling tools, and other accidents are obviously increased.
In order to avoid a series of problems caused by excessive well deviation, many scholars have published relevant research results. As early as the 1960s, Bailey and Finnie concerned the dynamics of drill string, and the natural frequency of drill string through experiments was obtained with graphic-arts technique, which established a foundation for the development of modern drill string dynamics.1,2 According to D’Alembert’s principle, friction force and inertia force were introduced into Bailey’s model, and a finite element dynamic model of BHA was established by considering the design parameters of stabilizer, buoyancy, and wellbore trajectory. Then, Yigit and Christoforou3,4 employed Euler-Bernoulli beam to study the lateral vibration of drill string with axial load and lateral force by the assumed mode method, and the effects of axial force and initial deflection on the lateral displacement and velocity was described. In the same year, Shuai et al. 5 established the differential equation of BHA lateral vibration based on the rotor dynamics theory, the natural frequencies of BHA lateral vibration with three different boundary conditions was derived, and the effects of WOB, rotational speed, and drilling fluid density on the natural frequencies were discussed. In order to optimize the BHA structure and drilling parameters, Ghasemloonia et al. 6 established a nonlinear coupled vibration model of drill string vibration through computer simulation, and the symbolic solution of the governing equation was obtained by Galerkin method. In addition, Professor Zhu et al.7,8 established a nonlinear dynamic model of BHA based on D’Alembert principle and virtual work principle; the effects of WOB and rotational speed on lateral vibration of BHA were analyzed by numerical simulation. The buckling response of drill collar with lateral vibration was considered, and the relationship between BHA lateral vibration characteristics and mechanical parameters were revealed by calculation results, which is of great significance for parameter optimization. Li et al.9,10 established a lateral dynamic model of drill string in a highly inclined well by finite element theory, and the effects of rotational speed, WOB, well deviation angle, and friction coefficient on the lateral vibration of drill string are verified. On the basis of previous studies on vertical and curved wells, Cai et al. 11 established a dynamic model of BHA in curved boreholes by discrete element method, the numerical results were obtained by solving differential equations with generalized alpha method; The accuracy of theoretical model and numerical simulation was verified by field measurement data, which provided ideas and schemes for the study of drill string dynamics in curved wells. Aiming at the problem of low penetration rate of traditional anti-inclination drill assembly, Fu et al. 12 established a dynamic model of BHA with prebent joint by finite element method on the basis of engineering application, and the effects of BHA structural parameters and mechanical parameters of the system on lateral force and BHA motion morphology were discussed, but the results show that the bit motion is unstable. In the following year, the dynamics model of BHA with prebent joint was established with Lagrange equation by Di et al.,13–16 who considered the friction between BHA and borehole wall, as well as the interaction between bit and formation in; the results show that the structural parameters of BHA and the mechanical parameters of the system have a great influence on the lateral vibration of BHA. After the structural particularity of BHA with prebent joints was analyzed, Zhang et al.17,18 proposed a method for quickly solving the transverse response of BHA based on the previously established dynamic model. Subsequently, Di and Wang et al.19–21 derived the dynamic lateral forces on bit by using the force and moment balance theory. The inclination reduction of BHA applied in field engineering is basically consistent with the theoretical analysis, however, the size of stabilizer in the drill string is neglected in the most existing studies, in this case, the theoretical model is little optimized owning to the simplified analysis of drill string, and the calculated results are slightly different from the actual working conditions, which limits the application of the theoretical results in engineering.22,23 In 2023, a semi-continuous model for studying 1200 m column was developed by Goicoechea et al., 24 which established structural model with a continuous wave equation for the torsional motion in 1-DOF system. At the same time, a coupled stick-slip and whirl model with 6 DOFs was proposed by Yong et al., 25 and numerical simulations were conducted. The Lagrange method was employed to establish the drilling string dynamics model with considering the stabilizer-borehole wall interaction, drill collar-borehole wall interaction, and bit-rock interaction. In addition, a comprehensive continuous with Cosserat rod model is developed by Goicoechea to study the dynamics of a drill-string, which reassures the hypothesis that the new continuous approach can capture aspects of the dynamics that cannot be modeled with low-dimensional representations. 26
For defect of establishing mechanical model of BHA, aiming at the problem of well deviation in air drilling, the mechanical characteristics of BHA in different working conditions is clarified for exploring the influence parameters on well deviation is this paper, which provides theoretical guidance for the structural design of BHA and the optimization of drilling parameters.
Dynamic model of BHA
The BHA with the double-span drill collar in a vertical well is shown in Figure 1(a). It is composed of two stabilizers, a bit, drill collars, and wellhole. The cross-sectional mechanical model of the drill collar is shown in Figure 1(b), which rotates around the longitudinal axis with a constant angular velocity Ω (for convenience of mathematical model, clockwise rotation is viewed from the top in Figure 1). The BHA is usually affected by axial, torsional, and lateral vibrations simultaneously. In this study, only the lateral vibration of double-span drill collar in air drilling is concerned as well deviation control of air drill process in this paper. After continuity condition at the joint in double-span drill collar is given, Lagrange equation and Galerkin method are employed to establish the dynamic model of double-span drill collar, and the influence of structural parameters of BHA on lateral vibration of drill string is analyzed. In the modeling process of dynamic equations, the expressions of kinetic energy, potential energy, and virtual work of first-span drill collar are firstly derived in detail, and energy expressions for the second-span collar are obtained by the same principle.
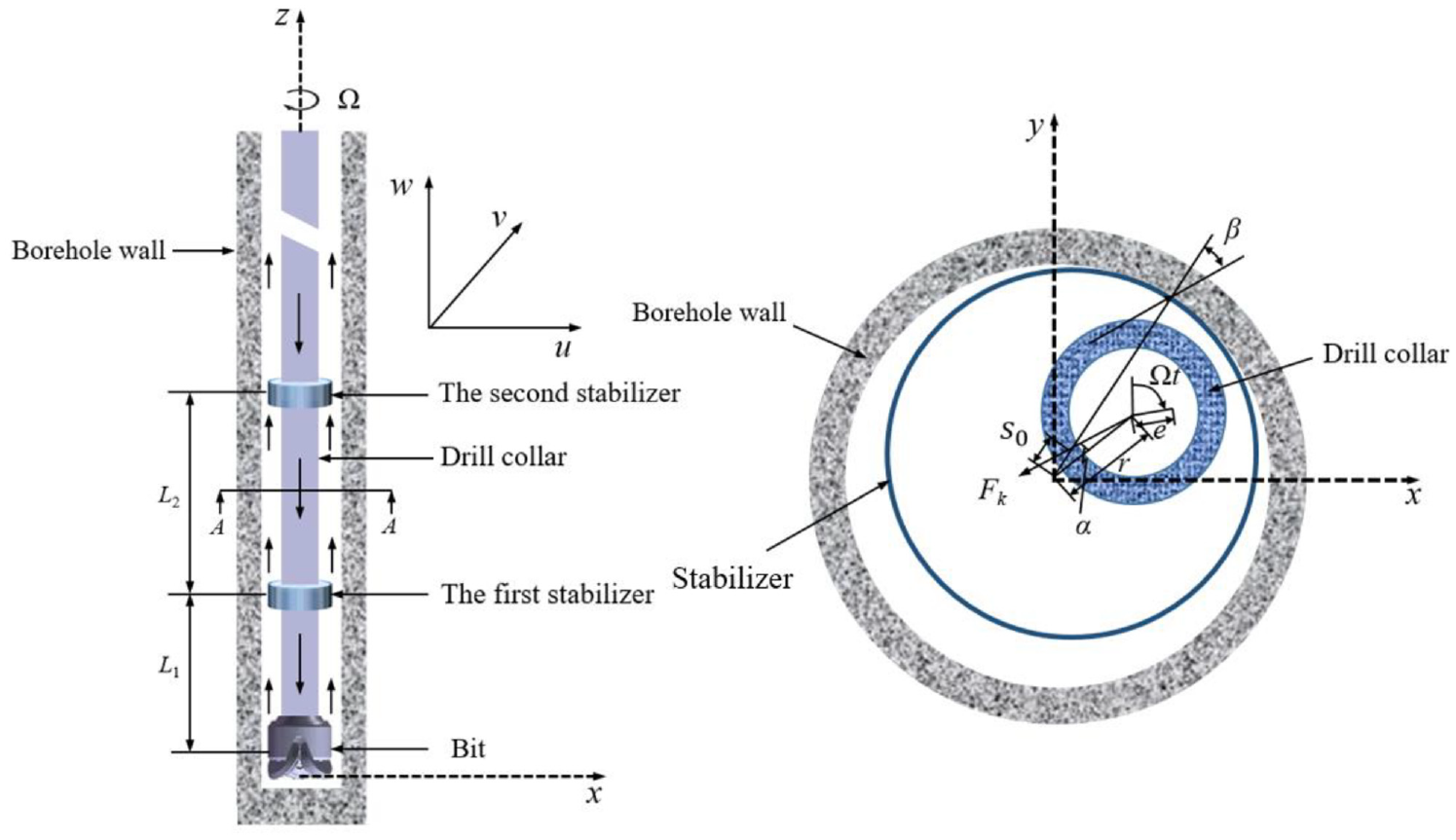
Schematic diagram of the double-span drill collar: (a) diagram of the double-span BHA and (b) A-A cross section of BHA.
The circulating medium in air drilling is low density compress gas, whose kinetic energy is so small that can be ignored compared to the kinetic energy of drill collars. Therefore, the total kinetic energy of the first-span drill collar including the translational kinetic energy and rotational kinetic energy can be written as,

where, L1 is the length of drill collar between bit and first stabilizer; ρ is the density of drill collar; A is the cross-sectional area of drill collar. VG is the magnitude of velocity vector of mass center of a unit disk along the drill collar at distance z, that is,

where u1, v1, and w1 is the displacement of first-span drill collar in x, y, and z directions, respectively, as shown in Figure 1. Parameters
In the system, Jx, Jy, and Jz are the rotational inertia of per unit length string with respect to x, y, and z directions, respectively.

where, I is the area inertia moment of per unit length string.
When the BHA is rotated in the normal drilling process, therefore, the angular velocity components of the drill collar in x, y, and z directions can be written as,

where,

Substituting equations (2)–(5) into equation (1), the kinetic energy of the first-span drill collar can be summarized as,

For the first-span drill collar mainly subjected to axial load and bending deformation, the axial vibration in the string is ignored, and potential energy of BHA is given as:

where, EI is the bending stiffness of drill collar; N(z) is the axial force of drill collar in z direction, which can be expressed as,

where, P is the axial force on the bit, that is, WOB (weight on bit); g is gravity acceleration.
Hypothetical mode method is applied to assume the lateral displacement of drill collar, and the first order modal shape of drill collar is only considered. Therefore, the lateral displacement of the double-span drill collar is given as,


where,


where,
In the modeling process, the double-span BHA is equivalent to supported beam as shown in Figure 2. Here, point o represents the position of drill bit, point 1 represents the first stabilizer, and point 2 represents the second stabilizer. Both the drill bit and stabilizers are supported by hinge supports. The boundary conditions in point o and 1 are severally expressed as,


Equivalent beam model of BHA.
Substituting equations (11) and (12) into equation (13), yields

The boundary and continuous conditions in the joint of double-span BHA can be ascertained as,

According to equation (15), the relationship between coefficients and eigenvalues can be determined. Since there is a non-zero solution for the constant coefficients, the determinant of coefficient matrix of trigonometric function represented by eigenvalues should be zero, and the eigenvalue equation of the determinant is written as,

If drill collar lengths L1 and L2 are given based on the practice engineering, an accurate eigenvalue can be obtained by numerical computation. As the eigenvalues are further determined, the values of coefficients C2, C4, D2, and D4 can be calculated by equation (15). The first order modal shape function of double-span BHA is summarized as follows,


Then, substituting equations (9), (10), and (17) into equations (6) and (7) respectively. Through mathematical derivation, the kinetic energy and potential energy of the first span drill collar can be expressed as,

where,

Similarly, the kinetic energy and potential energy of the second span drill collar are expressed as follows,


where,

The potential energy expression of drill collars is complicated when introducing the friction between stabilizer and borehole wall, as well as the interaction between bit and formation. In order to simplify the differential equation of drill collar vibration, the effect of drill collar on potential energy is equivalent to the work of a restoring force, then the stiffness can be expressed as,

where, s0 is the clearance between stabilizer and borehole wall.
For the air drilling, the damping force generated by compressed air can be neglected, and the virtual work mainly consists of the virtual work generated by the equivalent restoring force, and the contact force between drill collar and borehole wall, which can be expressed as,

where, the first term is the virtual work generated by equivalent restoring force; the second is the virtual work generated by the contact force between drill collar and borehole wall. They are expressed as,


where,


where, α is the rotational angle of geometric center of drill collar with respected to geometric center of stabilizer. β is the friction angle generated by the contact between stabilizer and borehole wall. According to Coulomb friction law, the angle between stabilizer and borehole wall can be derived. As shown in Figure 1(b), the geometric relationship between angular displacement α and friction angle β is given as,

When the lateral displacement of drill collar is large enough, that is, greater than the clearance between drill collar and borehole wall, the drill collar should be contacted with the borehole wall. The normal and tangential components of contact force can be expressed by,

where, kh is the contact coefficient; c0 is the clearance between drill collar and borehole wall; μh is the friction coefficient; Ro is the outer radius of drill collar.
The generalized force generated by virtual work of system is defined as,


The differential equation related to lateral vibration of the vibration system can be derived by Lagrange formula, that is,


By substituting corresponding kinetic energy and generalized force into equations (36) and (37), the differential equation of lateral vibration of the firs span drill collar is expressed as,


where,

Similarly, according to the modeling process of the first span, the differential equation of lateral vibration of the second span drill collar is written as,


where,

Simulation results and discussion
The governing equation of lateral vibration of BHA is derived in the section above. Here, numerical computation for dynamic characteristics of BHA is carried out based on theoretical analysis. In order to clarify the influence of structure variation of BHA on the dynamic characteristics, the lateral vibration characteristics of BHA with four different combinations related to structure parameters are discussed. Table 1 shows the basic parameters of BHA, and Table 2 shows the characteristic values and coefficients of the first order mode shapes of BHA with four different structure parameters.
Basic parameters of the drill string system.

Eigenvalues and coefficients.

When the structure combination of BHA is determined, the corresponding eigenvalues of the first order mode shapes can be obtained as shown in Figure 3(a). It can be found that the characteristic value of the first order mode shape of BHA is decreased with the increase of drill collar length, and the characteristic value is significantly affected by the structure parameter of drill collar. According to Table 2, when the length combination of BHA are L1 = 10, L2 = 19 and L1 = 19, L2 = 10, the characteristic values of the first-order mode shapes of drill collars are identical. However, Figure 3(b) shows that the first order modal shapes of BHA with four combinations are absolutely different.

The relationship among length of drill collar, characteristic values, and the first order mode shape: (a) eigenvalue and (b) first-order modal shape.
Dynamic characteristics of BHA with L1 = 10 and L2 = 10
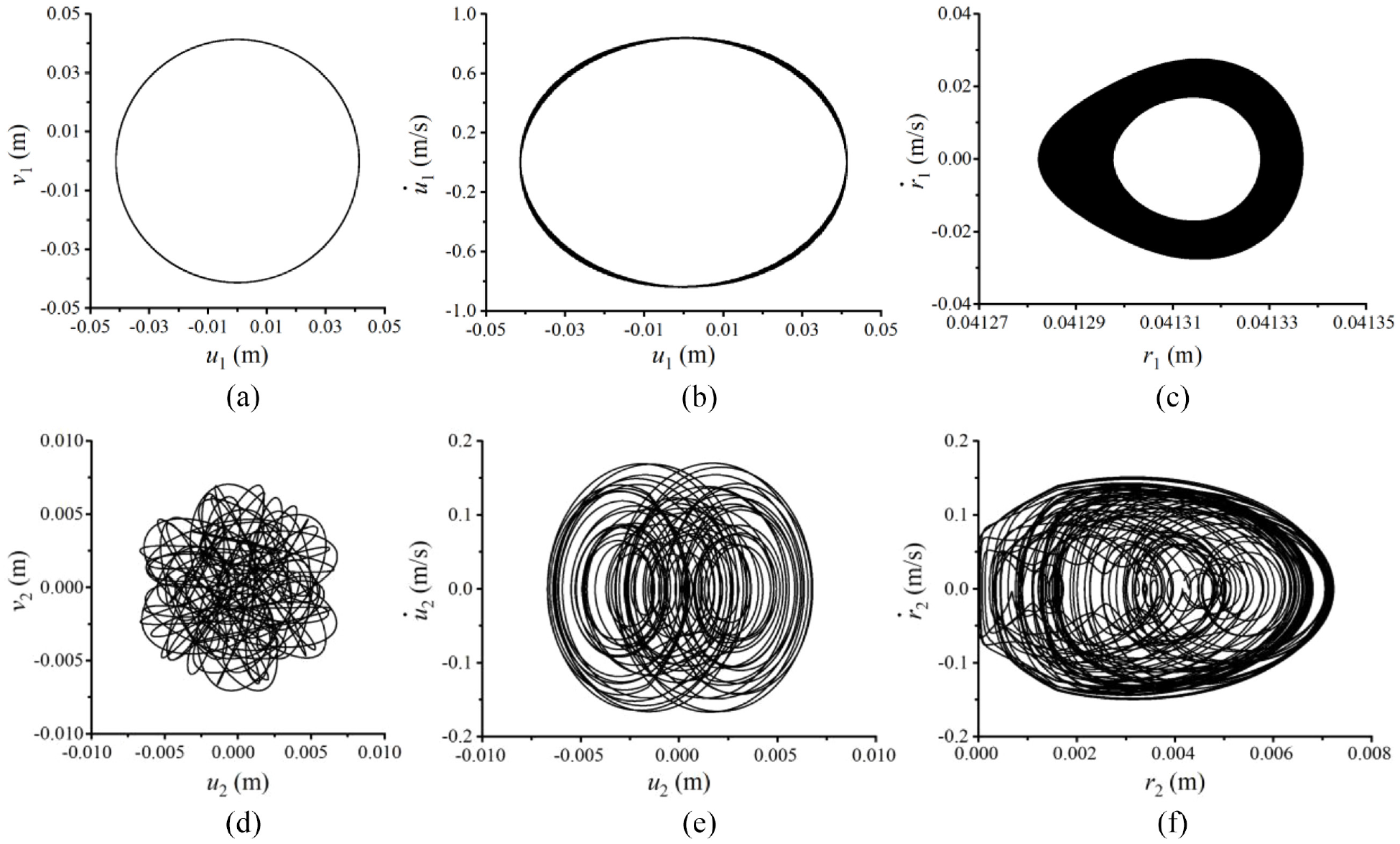
The parameters of BHA is chosen as Table 1, and the dynamic characteristics of BHA with L1 = 10 and L2 = 10 are shown in Figure 4. When the motion of BHA is steadily operated, the motion trajectory of geometric center of BHA, the phase curve in x direction and the radial phase trajectory are obtained. The lateral vibration of the first span of BHA are shown in Figure 4(a) to (c), and the lateral vibration of the second span drill collar are described in Figure 4(d) to (f). As can be seen from Figure 4(a), the lateral displacement of the first span drill collar is small, far less than the gap between drill collar and borehole wall; that is to say, there is no collision between drill collar and borehole wall. Compared with the second span drill collar, the lateral displacement of the first span drill collar is slightly larger, as shown in Figure 4(d). The phase trajectory of the first span drill collar in x and radial direction are given in Figure 4(b) and (c), respectively; it can be seen that the ranges of vibration velocity in the two directions are consistent, and the vibration velocity of BHA is small. It can be seen from Figure 4(e) and (f) that the vibration velocity of the second span drill collar is slightly less than the first-span drill collar, and the range of velocity fluctuation is narrower. In conclusion, when the structural parameter of BHA with L1 = L2 = 10 m, the lateral displacement of the two span drill collars is small, which is contacted without borehole wall, but the lateral vibration of the first span drill collar is slightly greater than the second-span drill collar.

Dynamic characteristics of BHA with L1 = L2 = 10 m: (a) trajectory of the first span, (b) phase of the first span in x direction, (c) radial phase of the first span, (d) trajectory of the second span, (e) phase of the second span in x direction, and (f) radial phase of the second span.
Dynamic characteristics of BHA with L1 = 10 and L2 = 19
The parameters of the BHA system is chosen as Table 1, and the dynamic characteristics of BHA with L1 = 10 and L2 = 19 are shown in Figure 5. As can be seen from Figure 5(a), the lateral displacement of the first span drill collar is in the range of 0.001–0.003 m, which is far less than the gap between drill collar and borehole wall, and so there is no collision between drill collar and borehole wall. As the length of second span drill collar is increased, the maximum lateral displacement of BHA is approached to 0.015 m, but less exceed the gap between drill collar and the borehole wall; therefore, the drill collar is little contacted with borehole wall. It can be seen from Figure 5(b) and (c) that the vibration velocity of the first span drill collar in x and radial directions are consistent, and the maximum vibration velocity is about 0.06 m/s. However, the maximum vibration velocity of the second-span drill collar in x direction is approximated to 0.15 m/s, which is greater than the maximum radial vibration velocity, as shown in Figure 5(e) and (f). It follows that under this condition, the lateral displacement and velocity of the second span drill collar are greater than the first span drill collar; in the other words, the vibration of the second span drill collar is more severe in the drilling process.

Dynamic characteristics of BHA with L1 = 10 m and L2 = 19 m: (a) trajectory of the first span, (b) phase of the first span in x direction, (c) radial phase of the first span, (d) trajectory of the second span, (e) phase of the second span in x direction, and (f) radial phase of the second span.
Dynamic characteristics of BHA with L1 = 19 and L2 = 10
The parameters of the BHA system is chosen as Table 1, and the dynamic characteristics of BHA with L1 = 19 and L2 = 10 are shown in Figure 6. The motion trajectory of the geometric center of the first span drill collar is circular, as shown in Figure 6(a); it can be seen that the lateral displacement of the first span is the maximum value. In this case, the lateral displacement of BHA is approached to clearance between drill collar and borehole wall. Therefore, the first span drill collar is always rotated and contacted with the borehole wall. Different with the first span, the maximum lateral displacement of the second drill collar is only 0.008 m, which is far less than the gap between the drill collar and borehole wall. In this case, there is no collision between the drill collar and borehole wall, and the motion trajectory of the second span drill collar is chaotic, as shown in Figure 6(d). The phase trajectory of the first and second span drill collar in x direction is shown in Figure 6(b) and (e), respectively. The maximum velocity of the first span is approximated to 0.8, and 0.16 m/s of the first span. Since the first span drill collar is always contact with the borehole wall, the radial displacement of the first span is fluctuated around 0.0413 m; and its radial velocity of the first span is small, as shown in Figure 6(c). However, the radial displacement of the second span drill collar is small, and the movement of the drill collar is less restricted by borehole wall. Therefore, the radial velocity of the second span drill collar is greater than the first, as shown in Figure 6(f).
Dynamic characteristics of BHA with L1 = 19 m and L2 = 10 m: (a) trajectory of the first span, (b) phase of the first span in x direction, (c) radial phase of the first span, (d) trajectory of the second span, (e) phase of the second span in x direction, and (f) radial phase of the second span.
Dynamic characteristics of BHA with L1 = 19 and L2 = 19
The parameters of the BHA system is chosen as Table 1, and the dynamic characteristics of BHA with L1 = 19 and L2 = 19 are shown in Figure 7. According to Figure 7(a) and (d), it can be found that the motion trajectory of the geometric center of the BHA is circular, and the radius of the circle is equal to the gap between drill collars and borehole wall, and so the lateral displacement of the BHA is maximum. The phase trajectory of the first and second span drill collar in x direction is shown in Figure 7(b) and (e), respectively; it can be seen that the phase curve of the two span is similar, and the maximum velocity is 0.8 m/s. Under this condition, the two span drill collars are collided with borehole wall, and so the radial displacement of the two span drill collars are fluctuated around 0.0413 m, as shown in Figure 7(c) and (f). It can be found that the fluctuation range of radial displacement of the first span drill collar is wider, therefore, the collision between drill collar and borehole wall is more severe, which leads to large displacement of drill collar and vibration velocity.

Dynamic characteristics of BHA with L1 = 19 m and L2 = 10 m: (a) trajectory of the first span, (b) phase of the first span in x direction, (c) radial phase of the first span, (d) trajectory of the second span, (e) phase of the second span in x direction, and (f) radial phase of the second span.
Parameter sensitivity analysis
In Section “Simulation results and discussion,” dynamic characteristics of BHA with four different combinations are analyzed. The theoretical study provides support for the design of BHA. When the length of the first-span and second-span drill collar is 19 and 10 m, the first-span collar is little contacted with the borehole wall. In this case, in the practical application, the lengths of the first-span and the second-span drill collar are given as 10 and 19 m, respectively. To further optimize design parameters and mechanical parameters of BHA in actual drilling conditions, the effects of rotation speed of BHA, stabilizer size, and WOB on the lateral vibration of drill collars when L1 = 10 m and L2 = 19 m will be discussed. The research are of great significance for the optimization of actual drilling parameters.
Effect of rotation speed on dynamics of BHA
In order to reveal effect of rotation speed on lateral vibration of BHA, the rotation speeds of BHA are selected 50, 60, and 70 r/min, respectively, and other basic parameters of BHA system are applied in Table 1. The motion trajectory and radial displacement of BHA with different rotation speeds are shown in Figure 8. The motion trajectory of drill collar is appeared in times of 90–100 s, and the radial displacement of drill collar is represented in times of 0–100 s. As shown in Figure 8(a), when rotation speed is 70 r/min, the motion trajectory of the first span drill collar is approximatively a circle, while the motion trajectories of the drill collar with the other two rotation speeds are inside the circle. Therefore, the smaller the rotational speed is, the smaller the area covered by the motion trajectory. It can be seen from Figure 8(b) that the radial displacement of the first span is increased with the improvement of rotation speed. When the rotation speed is 50, 60, and 70 r/min, the amplitude of radial displacement is 0.012, 0.025, and 0.0413 m, respectively; in this case, the drill collar is collided with the borehole wall. As shown in Figure 8(c), the motion trajectory of the second span with rotation speed 70 r/min is close to the inside of displacement circle; the motion trajectory of the second span with rotation speed 50 r/min is located outside the circle; the motion trajectory of the second span with rotation speed 60 r/min is in the middle of rotation speeds 50 and 70 r/min. In addition, the lateral displacement of the second span with the three rotation speeds is very small and less collided with borehole wall. As shown in Figure 8(d), the red curve is steadily changed, and amplitude of radial displacement is approximately 0.007 m in the first 60 s. After times of 60 s, radial displacement of the second span is increased in rotation speeds of 50 and 60 r/min. The radial displacement amplitude of the drill collar is minimum when BHA is rotated with 70 r/min, and maximum when rotation speed with 50 r/min. In this case, under WOB of 10–40 kN, the rotation speed should be controlled nearby 60 r/min. If the rotation speed more than 60 r/min, severe well deviation is appeared.

The dynamic characteristics of drill collar in different rotation speeds: (a) motion trajectory of the first span drill collar, (b) radial displacement of the first span drill collar, (c) motion trajectory of the second span drill collar, and (d) radial displacement of the second span drill collar.
Effect of stabilizer size on dynamics of BHA
Stabilizer of BHA is important for controlling well deviation. According to practical drilling experience, the size of stabilizer has a great influence on the lateral vibration of the drill collar. In order to clarify the relationship between the size of stabilizer and the lateral vibration of drill collar, the diameters of stabilizer are given as 0.2286, 0.308, and 0.3112 m, respectively, and the motion trajectory and radial displacement of the drill collars with different sizes are obtained by numerical calculation, as shown in Figure 9. The red represents the stabilizer with diameter 0.2286 m, which represents no stabilizer installed in BHA. Blue represents the stabilizer of diameter 0.308 m, which is referenced from the actual operating conditions. Black represents the stabilizer of diameter 0.3112 m, whose diameter is the same size as the bit. As shown in Figure 9(a), in the different diameter of stabilizer, the motion trajectory of the first span is exactly coincident, all circles with radius 0.0413 m, and the first span drill collar are always contacted with the borehole wall. As can be seen from Figure 9(b), when the no stabilizer is installed in BHA, the first span is quickly contacted with the borehole and rotated around borehole, while the other two sizes of drill collar is contacted with the borehole wall. As shown in Figure 9(c), the motion trajectory of the second-span drill collar is greatly affected by size of the stabilizer. In the case of BHA without stabilizer, the motion trajectory of the second-span drill collar is still a circle, while the motion trajectory of the second-span drill collar is closed to geometric center of the hole. As shown in Figure 9(d), the radial displacement amplitude of the second-span drill collar without stabilizer is 0.0413 m, while the other two sizes of stabilizer is only 0.006 m, which is far less than the gap between the drill collar and borehole wall. Therefore, the two stabilizer diameter approached to bit diameter is recommend in practical gas drilling engineering.
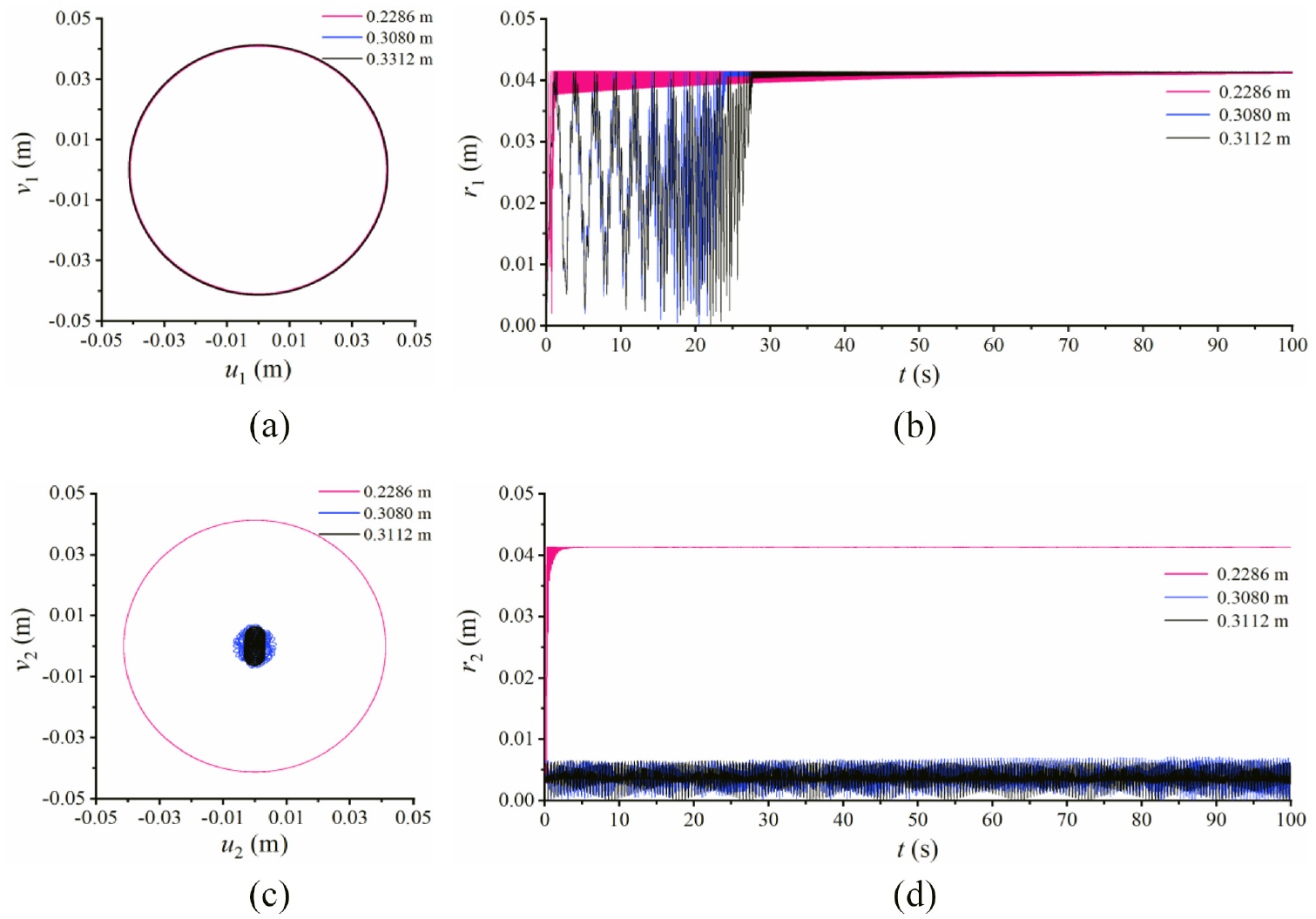
The dynamic characteristics of drill collar in different size of stabilizer: (a) motion trajectory of the first span drill collar, (b) radial displacement of the first span drill collar, (c) motion trajectory of the second span drill collar, and (d) radial displacement of the second span drill collar.
Influence of WOB on drill collar dynamics
The WOB of 10, 40, and 70 kN on the bit are considered respectively, and other basic parameters remain unchanged. The lateral vibration characteristics of the two span drill collars are shown in Figure 10. As shown in Figure 10(a), the motion trajectory of the first-span drill collar in the three different WOB conditions is overlapped in a circle, which is indicated that the first-span drill collar is contacted and reversely whirled with wellbore. It can be seen from Figure 10(b) the first-span drill collar arrived at the maximum lateral displacement with WOB 70, 40, and 10 kN needs 10, 20, and 25 s, respectively. According to the analysis above, it can be found that with the increase of WOB, the first-span drill collar is rapidly contacted with the borehole wall, but the radial displacement is maintained at maximum of 0.0413 m. The motion trajectory of the second-span drill collar is chaotic. With increasing WOB, motion trajectory of drill collar is closed to geometric center of the well hole, and the lateral displacement of drill collar is far less than the gap between drill collar and borehole wall, as shown in Figure 10(c). Figure 10(d) shows the radial displacement of the second-span drill collar in the three different weight on bits. Before times of 25 s, the radial displacement of the second-span drill collar is the largest when WOB is 70 kN, followed by the second-span drill collar when WOB is 40 kN, and the minimum when WOB is 10 kN. After times of 25 s, the radial displacement of the second-span drill collar at WOB of 10 kN is maximum, while the radial displacement of the second-span drill collar at WOB of 70 kN is minimum, which is the opposite of the initial situation. WOB in air drilling technology is ranged from 10 to 40 kN, which is far smaller than liquid drilling. Because the circulatory mediator of air drilling is nitrogen, in this case, the pressure on rock in well bottom is much smaller, and so only WOB 10–40 kN is enough to crush rock in well bottom.
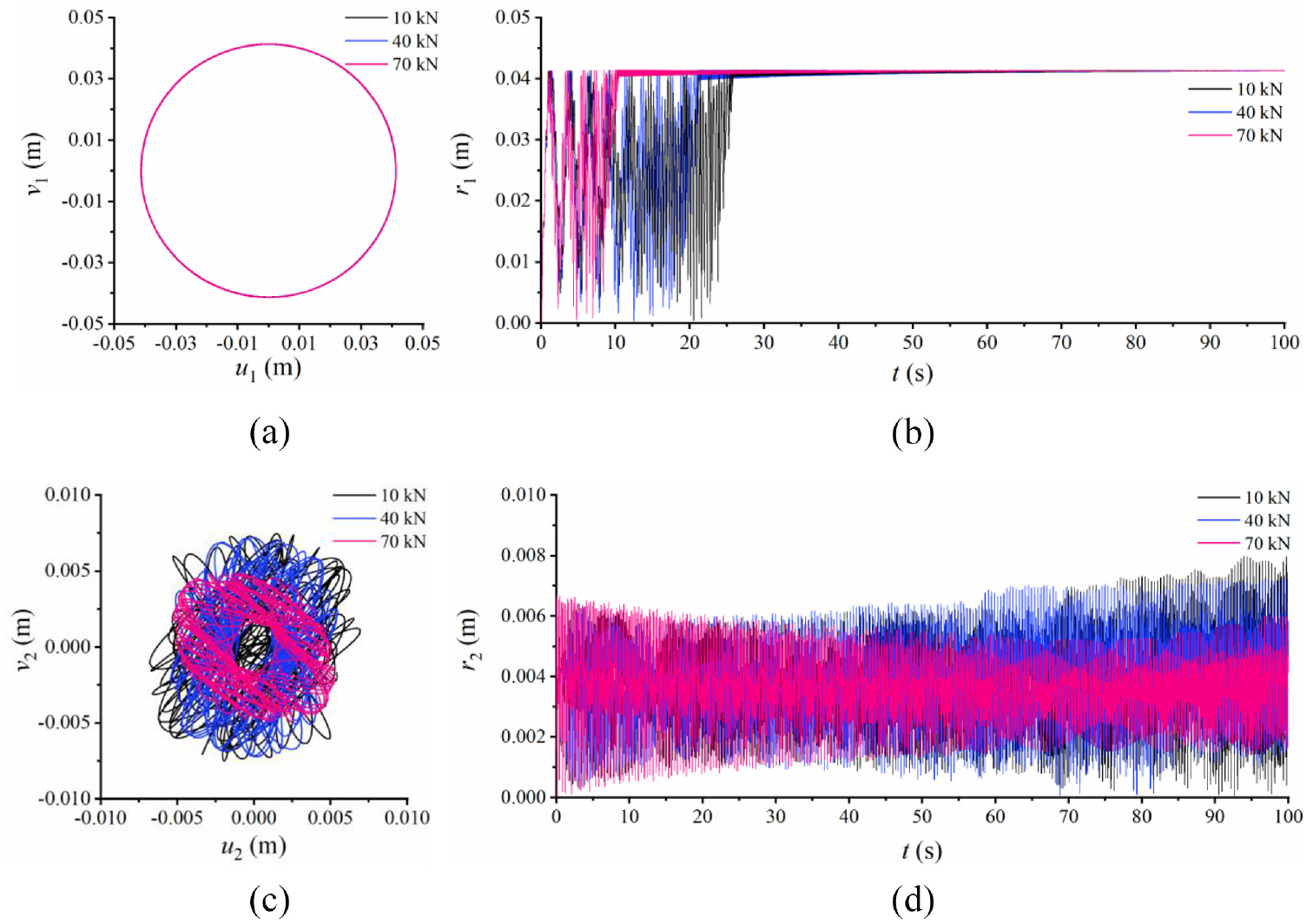
The dynamic characteristics of drill collar with three different weight on bits: (a) motion path of the first-span drill collar, (b) radial displacement of the first-span drill collar, (c) motion path of the second-span drill collar, and (d) radial displacement of second-span drill collar.
Conclusion
In order to solve the problem of unclear collision mechanism among multi-span drill collars and borehole wall and vibration mechanism of multi-span drill collars in actual working conditions, a lateral vibration model of double-span drill collar is established based on Lagrange equation combined with continuous conditions at stabilizer, and the vibration characteristics of double-span drill collar with different mechanical parameters are investigated in detail. The relationship between lateral vibration of drill collar and length combination, BHA rotational speed, weight on bit, and stabilizer size is revealed, which provides effective theoretical guidance for BHA structure design and optimization of drilling mechanical parameters. The important conclusions are summarized as follows:
(1) When the length of two span drill collars are identical, the lateral displacement of the first-span drill collar is greater than the second-span drill collar, and the vibration velocity of the first-span drill collar is greater than the second-span drill collar. In addition, the larger the length of the drill collar, the greater lateral displacement and velocity. When the length of the first-span drill collar is 19 m, the collar is in contact with the borehole wall. Only when the length of the first and second drill collar is 19 and 10 m respectively, the collar is little contacted with the borehole wall. In this case, in the practical application, the lengths of the first-span and the second-span drill collar are given as 10 and 19 m, respectively.
(2) The larger the BHA rotation-speed is, the larger the lateral displacement of first-span drill collar is, while the smaller the lateral displacement of the second-span collar is. When the BHA rotation-speed is controlled in 70 r/min, the radial displacement amplitude of the first-span drill collar reaches 0.0413 m, and the first-span drill collar contact with the borehole wall as reverse vortex motion. However, the radial displacement of the second-span drill collar is small, with amplitude 0.007 m. In this case, under WOB of 10–40 kN, the rotation speed should be controlled nearby 60 r/min. If the rotation speed more than 60 r/min, severe well deviation is appeared.
(3) The size of the stabilizer has a significant influence on the lateral vibration of the drill collar. The double-span drill collar without stabilizer is in contact with the borehole wall. The first-span drill collar with stabilizer equal to bit diameter is in contact with the borehole wall, but the second-span drill collar is uncontacted with the wall. Therefore, the two stabilizer diameter approached to bit diameter is recommend in practical gas drilling engineering.
(4) The larger the WOB applied in BHA, the faster the first-span drill collar contacted with the wall as reverse vortex motion of the drilling string; while the lateral displacement of the second-span drill collar is smaller, and trajectory of the second-span drill collar is closely approached to center of the hole. WOB in air drilling technology is ranged from 10 to 40 kN, which is far smaller than liquid drilling. Because the circulatory mediator of air drilling is nitrogen, in this case, the pressure on rock in well bottom is much smaller, and so only WOB 10–40 kN is enough to crush rock in well bottom.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research leading to these results received funding from [SINOPEC Southwest Oilfield Service Corporation Project] under Grant Agreement No [XN-2023-004], [the PetroChina Innovation Foundation] under Grant Agreement No [2020D-5007-0312], [the PetroChina-Southwest Petroleum University Innovation Consortium Project] under Grant Agreement No [2020Cx040103].