
Abstract
This paper proposes an adaptive integrated guidance control (IGC) scheme for the flight vehicle intercepting the maneuvering target with asymmetric field-of-view angle constraint, input magnitude and rate saturation, and system uncertainties. A novel nonlinear three-dimensional IGC model is established in the body line-of-sight (LOS) coordinate system by employing the dual-integral control law. Based on this model, the input magnitude and rate saturation for the conventional IGC system can be converted to the limitations of the new augmented states. Asymmetric integral barrier Lyapunov function and dynamic surface control approach are applied to deal with the asymmetric state constraints of the proposed IGC model, and adaptive control laws are designed to compensate for model uncertainties. Furthermore, based on the Lyapunov stability theory, it is proved that all signals in the closed-loop system are bounded while the constrained states are not violated. Finally, the effectiveness and robustness of the proposed IGC scheme are illustrated with numerical simulations.
Keywords
Introduction
Over the past decades, the Integrated Guidance and Control (IGC) approach has been the center of attention due to its advantages of considering the coupling between two subsystems and allowing the direct generation of control commands.1,2 However, when a vehicle equipped with a strap-down seeker intercepts a maneuvering target, due to its narrow field of view, the performance of the IGC system will degrade or even lead to system instability once the target exceeds the seeker’s maximum detection. Therefore, the increased requirements for the safe operation of IGC systems have prompted research into field-of-view (FOV) constrained controllers.
Many fruitful design methods on FOV-constrained controllers have been obtained, such as proportional navigation (PN)-based methods,3,4 optimal control methods,5,6 sliding mode control (SMC) methods,7,8 and backstepping approaches.9,10 However, the FOV angle considered in the above studies is simplified as the look angle between the velocity of the vehicle and line-of-sight (LOS), which is not suitable for the vehicle equipped with the strap-down seeker. 11 In contrast, the body-LOS angle can not only be directly measured but also make full use of the information of the missile’s attitude dynamics. Based on the decoupling model, Zhao et al.12,13 design the IGC laws considering the FOV constraints in the longitudinal plane using the BLF and DSC method, as well as the integral barrier Lyapunov function (IBLF) and SMC theory, respectively. As an extension, Guo et al. 14 investigate an IGC law with FOV limit in 3D engagement geometry. By using of the reinforcement learning idea of adaptive dynamic programming, Guo et al. 15 propose a novel IGC strategy for high precision strike of the vehicle with FOV constraint in the longitudinal plane. In addition, a low-order IGC design model with FOV constraint is established by Zhang et al., 16 then presented constrained IBLF-based 3D IGC scheme can guarantee the FOV constraint of the seeker based on the designed low-order IGC model and the roll channel model. It should be pointed out that the FOV constraints in the aforementioned studies are symmetric and this is just a special situation of the FOV constraints studied. However, since seeker is usually mounted on one side of the vehicle head to prevent severe aerodynamic heating, it is necessary to investigate the asymmetric FOV constraints. Chao et al. 17 extend the method proposed by Zhang et al. 16 with using a modified DSC and asymmetric BLF to a broader application such as when the asymmetric side-window constraint is considered.
There is no doubt that the aforementioned studies have made significant contributions to IGC research. However, the flight control system is suffering from multiple constraints due to complex flight conditions and inherent physical limitations of the actuator, where actuator input saturation is another important issue for the flight control system. A saturation function18–20 is always introduced to describe the input saturation nonlinearity, where the negative effects of saturation are compensated by building an auxiliary system. Besides, Zhang et al. 21 construct an anti-windup compensator to deal with the input saturation. Note that all of these studies were conducted without considering the rate limitation of the actuator in control strategy design. If the derivative of the signal exceeds the maximum capability of the actual actuator, it may result in severe failure of the actuator or loss of system stability while attempting to generate the required control law. Therefore, there is a growing body of literature that recognizes the importance of input magnitude and its rate constraint. It can be seen that the input magnitude and rate constraint of practical systems are handled by modeling the nonlinearity of input magnitude and rate constraint with saturation functions.22,23 Without modeling the nonlinearity of input, there are other methods to tackle the saturation of system input, such as the anti-windup model for rigid spacecraft attitude control, 24,25 a disturbance observer-based control scheme for flexible spacecraft 26 and the command filter. 27 Besides, Liu et al. 28 investigate a new neural adaptive control algorithm for strict-feedback systems with input magnitude and rate constraint, where the input constraint problem is creatively transformed into the issue of state constraint.
Motivated by the aforementioned studies, a novel 3D adaptive IGC law based on the backstepping method and asymmetric integral barrier Lyapunov function (AIBLF) technology is proposed, which is subject to the asymmetric FOV constraint and actuator magnitude and rate limit simultaneously. The main contributions are as follows:
(1) A new 3D IGC model is derived by introducing the strap-down decoupling model and designing dual-integral control law, such that both the FOV constraint and input magnitude and rate limit are transformed to be partial state constraints of the new IGC system. Then the issue of the IGC system with the FOV constraint and input magnitude and rate saturation can be guaranteed as long as the constrained states of the new 3D IGC system are not violated;
(2) A new controller is proposed for the 3D IGC model by introducing the AIBLF, which guarantees that all signals in the closed-loop system are bounded while the constrained states are not violated. That is, from the point of state-constrained tracking control, both the FOV constraint and actuator saturation of the IGC system are handled simultaneously. Compared with the existing symmetric FOV constraint problem of the IGC system, the proposed IGC method can not only realize the asymmetric FOV constraint but also ensure input saturation through model transformation. Besides numerical simulation results verify the effectiveness and superiority of the proposed IGC scheme.
The remainder of this article is organized as follows. Section “Problem formulation” presents the new 3D IGC model. The detailed design process of proposed IGC law and stability analysis are presented in Section “AIBLF-based 3D IGC scheme design and stability analysis.” The simulations and comparison results are shown in Section “Numerical simulation result.” Section “Conclusion” concludes the paper.
Problem formulation
A new 3D IGC model is given, followed by some necessary lemmas, assumptions, and design objectives are presented in this section.
The 3D engagement interception geometry of a flight vehicle
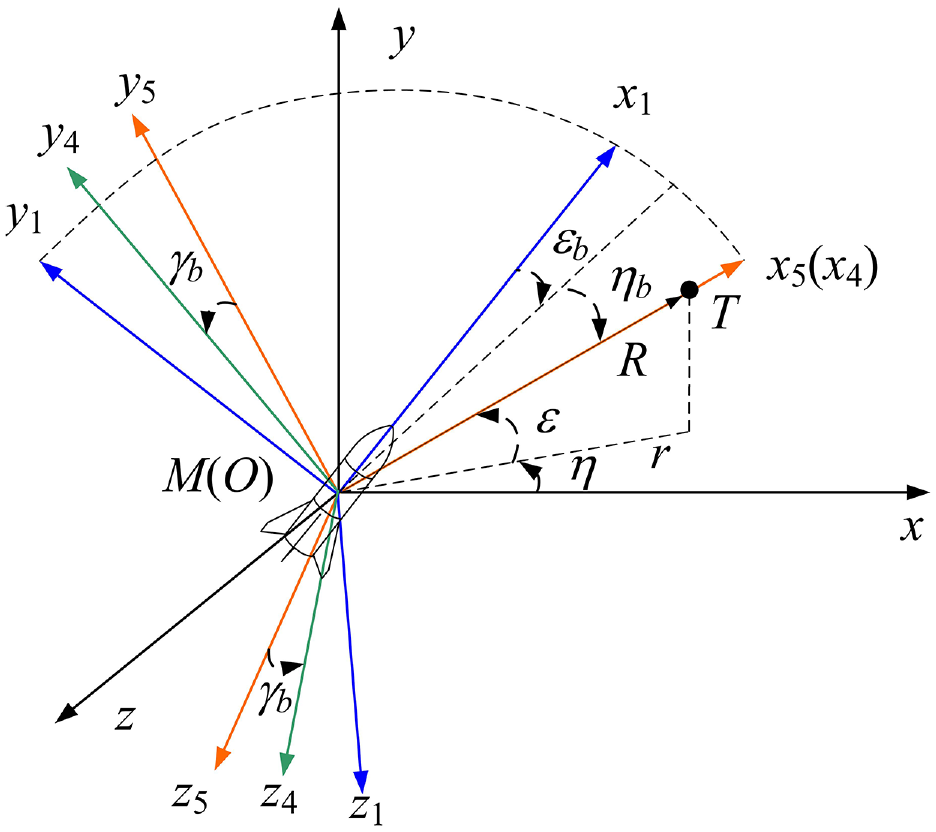
The 3D interception geometry of the vehicle and the target.
The 3D IGC model 14 in the body-LOS coordinate system is derived as follows

with

where
In this paper, the following dual-integral 28 is considered to deal with the input saturation

in which
For convenience, new augmented state variables and control variable are denoted as
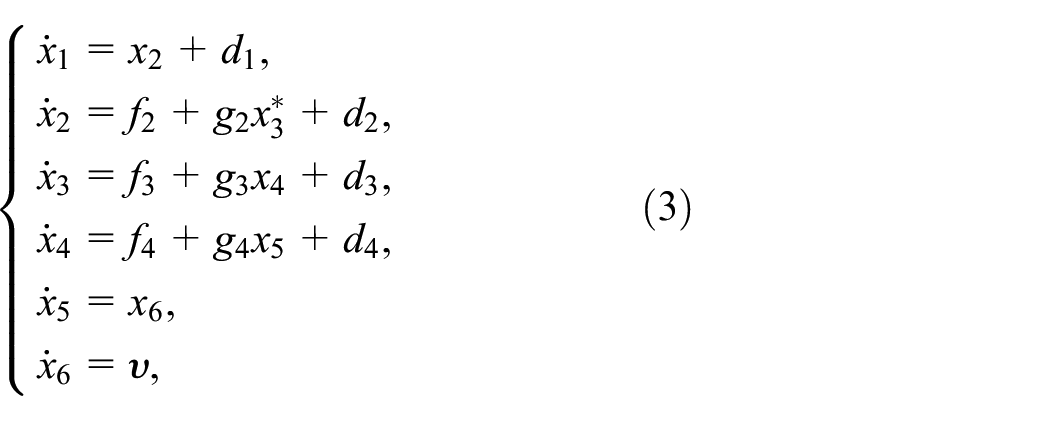
where

where
Then the control objective of this paper is described to design an adaptive control law
For the established novel 3D IGC model (3), the following assumptions, lemmas, and property are needed.


To handle the asymmetric state limitation, asymmetric smooth saturation function

in which

where

where

holds with
AIBLF-based 3D IGC scheme design and stability analysis
In this section, the AIBLF-based 3D IGC law with constrained FOV and input saturation are presented based on the novel IGC system (3) as well as the stability analysis is given by Lyapunov theory.
AIBLF-based 3D IGC scheme design
Define the tracking errors as follows

where
In order to ensure constrained FOV, input saturation, and uncertainties, the AIBLF-based 3D IGC law is given as

where

where
To avoid the problem explosion of complexity in the traditional backstepping approach, the following first-order filters are employed in each step

where

Stability analysis
The stability proof is presented based on Lyapunov theory and the control objectives are analyzed in this section. Choosing the Lyapunov function candidate

where the barrier Lyapunov function

and

where
Then the main theorem of this paper is established.
(1)
The constrained states
(2)
All tracking errors
(3) All signals of the closed-loop system are bounded.

where the
Taking the time derivative of
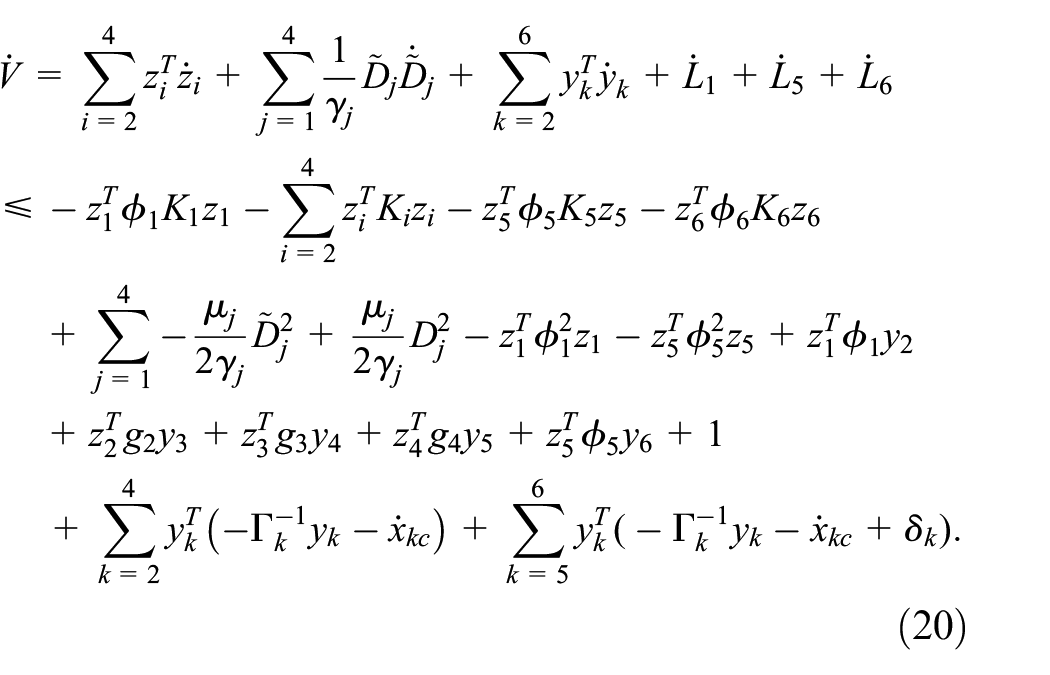
From (12), (13), (14), (15), and (19), we have

and

where

According to the young’s inequality, the following inequalities hold

The following inequalities also hold by the young’s inequality
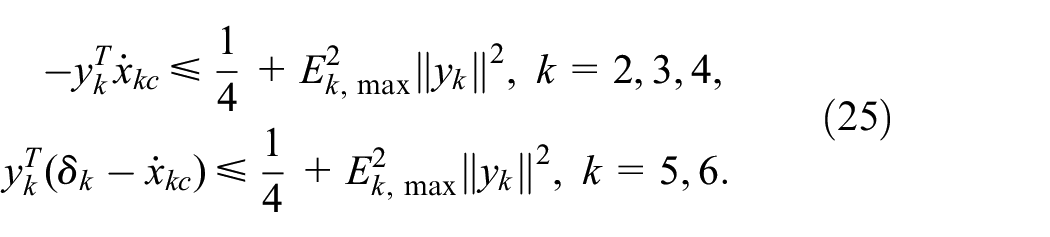
Substituting inequalities (23), (24), and (25) into (20), one has

on the compact

where
According to Lemma 2, the inequality

Thus, the boundedness of
This ends the proof.
Numerical simulation result
In this section, the effectiveness and robustness of the proposed adaptive FOV-constrained IGC scheme with input saturation are verified by numerical simulations. For the vehicle, the initial position and velocity are given by
For the moving target, the initial position, velocity, and acceleration vectors are given by
The parameters of input saturation are set as
Case 1. To demonstrate the feasibility of the proposed law under FOV constraint with different boundaries, simulations are carried out considering FOV angles with symmetric limitation boundaries
Case 2. To validate the superiority of the proposed IGC law (marked as AIGC ) in coping with the FOV constraint and input saturation, the traditional IGC law (marked as QIGC) based on quadratic Lyapunov function and BLF-based IGC (marked as BIGC) designed by Guo et al.
14
are employed for comparison, where the maximum FOV angle is chosen as 5°. The QIGC scheme can be obtained by rewriting

Case 3. To verify the robustness performance of the AIGC scheme without loss of generality, simulation cases are carried out for perturbations to atmospheric parameters, structural parameters, and aerodynamic coefficients given in Table 1.
Perturbations of corresponding parameters.

The simulation results of three cases are shown in Figures 2 to 4. It can be seen from Figure 2 that targets are intercepted successfully with acceptable miss distances and the body-LOS angles remain within the FOV constraint boundaries despite asymmetric constraint boundaries chosen for the FOV angle. Meanwhile, the curves of

Simulation results under Case 1: (a) curves of the 3D trajectories, (b) elevation angle of body-LOS, (c) azimuth angle of body-LOS, (d) aileron deflection, (e) rudder deflection, (f) elevator deflection, (g) rate of aileron deflection, (h) rate of rudder deflection, and (i) rate of elevator deflection.
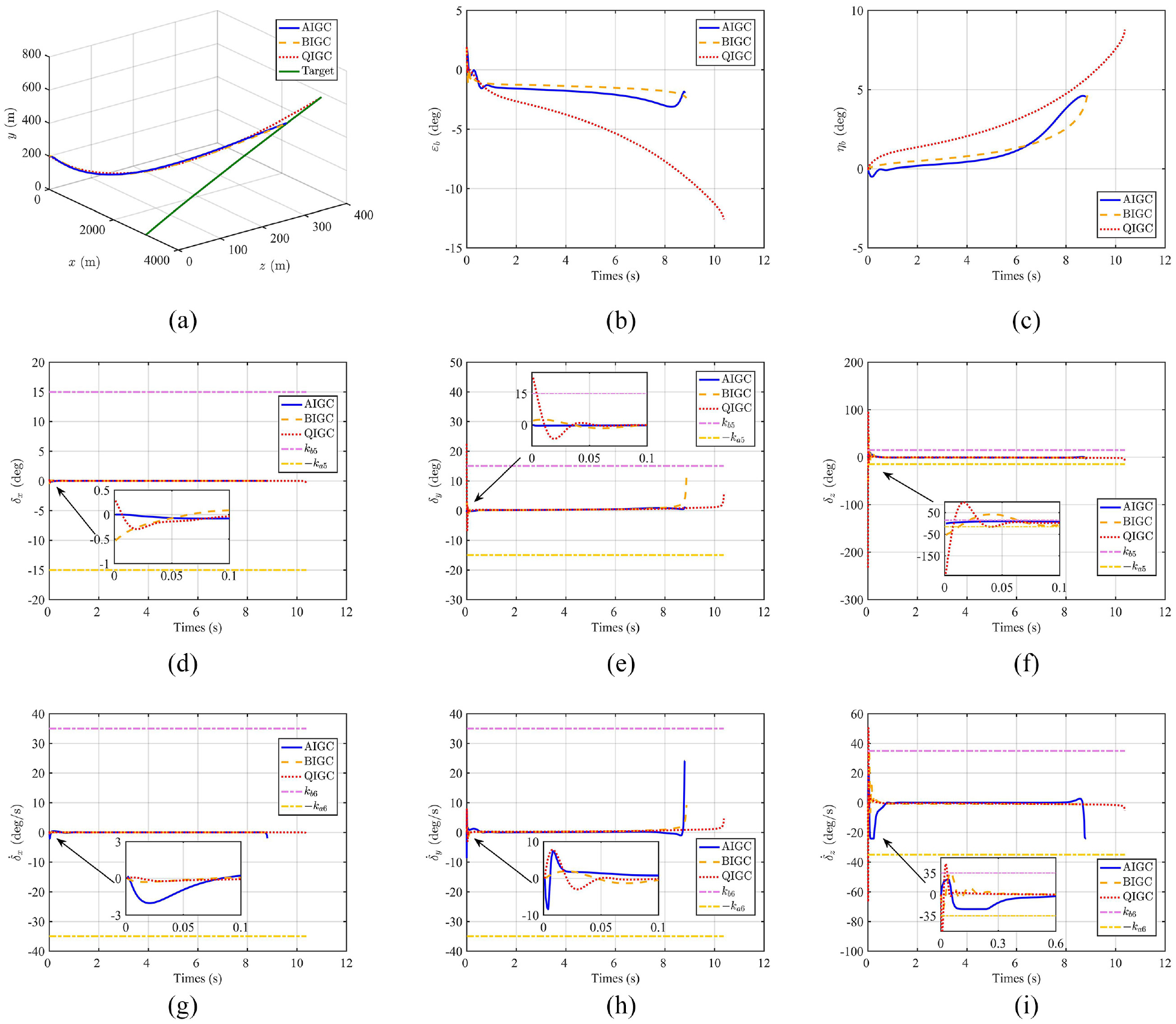
Simulation results under Case 2: (a) curves of the 3D trajectories, (b) elevation angle of body-LOS, (c) azimuth angle of body-LOS, (d) aileron deflection, (e) rudder deflection, (f) elevator deflection, (g) rate of aileron deflection, (h) rate of rudder deflection, and (i) rate of elevator deflection.

Simulation results under Case 3: (a) curves of miss distance, (b) elevation angle of body-LOS, (c) azimuth angle of body-LOS, (d) aileron deflection, (e) rudder deflection, (f) elevator deflection, (g) rate of aileron deflection, (h) rate of rudder deflection, and (i) rate of elevator deflection.
From Figure 3, it can be seen that body-LOS angles,
In summary, the control objective is achieved by the proposed IGC scheme. Therefore, the proposed law can effectively address the issue of IGC with FOV constraint and input saturation.
Conclusion
This paper proposes a novel IGC scheme for the flight vehicle to intercept the maneuvering target considering asymmetric FOV constraint, input saturation, and uncertainties. By combining the model of the IGC system with strap-down seeker and the dual-integral control law, a new 3D IGC model is established. Based on AIBLF method and DSC approach, the proposed IGC law provides a novel solution from point of state constraint to solve the issue of the asymmetric FOV constraint and actuator input saturation for the IGC system. Besides, adaptive control laws are introduced to compensate for model uncertainties. By comparison, the designed IGC scheme not only guarantees the FOV angle constraint with asymmetric limitation boundaries but also ensures safe actuator operation. Finally, simulation results illustrate the superiority and effectiveness of the proposed IGC scheme.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.