
Abstract
In order to address the poor shifting quality issue of a certain model of heavy-duty vehicles, a multi-objective parameter optimization strategy based on engine coordinated control is proposed. This strategy aims to improve shifting quality by reducing the sliding friction work and impact during the shifting process. The Non-Dominated Sorting Genetic Algorithm II (NSGA-II) is employed to perform multi-objective optimization on the coordinated control parameters, which include external control torque of the engine, start of fuel cut-off timing, and duration of fuel cut-off. By comparing the performance of different parameter combinations in terms of sliding friction work and impact, the optimal parameter combination is determined. Through bench testing verification, it has been demonstrated that utilizing the optimized parameters for engine coordinated control during the torque phase of the shifting process can significantly enhance shifting quality. This strategy provides an effective solution for addressing shifting quality issues.
Introduction
The automatic transmission (AT) is currently the most widely used type of transmission, typically consisting of a torque converter, planetary gear set, wet clutches, hydraulic operating system, and electronic control system. 1 The shifting process of an AT involves clutch-to-clutch shifting, where one clutch disengages while the other engages. Generally, the shifting process can be divided into two phases: the torque phase and the inertia phase. 2 During the torque phase, the low-gear clutch begins to disengage while the high-gear clutch starts to engage gradually. In this phase, power is mainly transmitted by the low-gear clutch. In the inertia phase, the low-gear clutch continues to disengage while the high-gear clutch gradually engages. Power transmission is primarily carried out by the high-gear clutch in this phase. During the shifting process, if torque conversion is not well controlled, it can result in significant shifting shocks and increase clutch wear, thus reducing the lifespan of the clutch. Therefore, developing advanced shifting control strategies is of great significance for improving shifting quality. 3
To develop shifting control strategies, it is necessary to establish a control-oriented dynamic powertrain system model. Bond graph is a commonly used modeling method, which has been applied in the modeling of AT 4 and hybrid powertrains. 5 However, in practical AT systems, there are many nonlinear factors such as friction and inertia, which can affect the shifting process. Bond graph models have limitations in accurately describing these complex dynamic characteristics. An effective complementary method is to establish a dynamic model of the automatic transmission and vehicle powertrain system based on the Lagrangian method. This method can overcome the shortcomings of bond graphs in handling nonlinear characteristics and dynamic complexity, providing a more accurate and reliable foundation for the development of shifting control strategies.6,7
In current research, controlling the clutch and engine is a key measure to improve shifting quality. By precisely controlling the timing and speed of the clutch engagement and disengagement during the shifting process, 8 or adjusting the torque output of the engine, 9 smoother shifting can be achieved. Furthermore, coordinated control of the clutch and engine during the shifting process can further enhance shifting quality.10,11 In terms of coordinated control, Čorić et al. 12 proposed an AT shifting control trajectory optimization method, representing the control trajectories of the clutch and engine as polynomial functions. They optimized the control trajectories of the clutch and engine in AT using pseudospectral collocation methods to achieve comfortable and efficient shifting. However, they did not analyze in depth the coordination relationship between the clutch and engine torques. Ranogajec et al., 13 based on the slip state of the clutch, developed six different open-loop control strategies. They quantitatively evaluated the shifting performance with different levels of complexity and applicability by optimizing the clutch and engine torque distribution. However, they did not make a comparison between the torque phase and inertia phase with different engine coordinated control strategies. Regarding coordinated control optimization, some researchers have used Linear Quadratic Regulator (LQR) to optimize control parameters such as engine torque and clutch torque during upshifting inertia phase of AT. 14 They utilized multi-objective optimization algorithms like genetic algorithms, 15 particle swarm optimization, 16 etc., to find the optimal combination of control parameters. They incorporated conflicting criteria with different weights in the cost function, including shifting duration, impact, sliding friction work, and other performance indices. 17 They even adjusted the weight values to personalize the control strategy according to user preferences and requirements. 18 Although these control strategies can improve shifting quality in certain scenarios, none of them have thoroughly analyzed the relationship between engine torque control in different phases (torque phase and inertia phase) and shifting quality.
This paper primarily focuses on improving shift quality through coordinated engine control. In order to conduct a dynamic analysis of the shifting process, the complex structure of the AT is modeled using the Lagrange method. By formulating six different coordinated control strategies, the relationship between coordinated control in different phases (torque phase and inertia phase) and shift quality is analyzed, and key parameters affecting shift quality are identified. Subsequently, two optimization strategies for coordinated control in different phases (torque phase and inertia phase) are developed, with the objective of minimizing sliding friction work and impact during the shifting process. The NSGA-II algorithm is employed to perform multi-objective optimization of the coordinated control parameters for the two strategies, resulting in a Pareto front of non-dominated solutions. Finally, a test bench experiment was conducted using the optimized coordinated control parameters to validate the proposed coordinated control strategies for their reliability.
Dynamic analysis of shift process
Powertrain structure
The powertrain system configuration studied in this research is shown in Figure 1. The torque output from the diesel engine is transmitted to the pump wheel of the torque converter, which then inputs to the turbine of the torque converter. The transmission receives the input from the torque converter and achieves changes in gear ratios through different combinations of engaging the shifting clutches. Finally, the power is transmitted to the driving wheels of the vehicle through a reduction mechanism. The transmission used is an electro-hydraulically controlled clutch-to-clutch planetary gear transmission. Its gear mechanism consists of two planetary gear sets and one compound gear set. During start-up, shifting from third to fourth gear or from fourth to third gear, it is necessary to control the coordination between four clutches to achieve gear changes. In other upshifting and downshifting processes, the main focus is on controlling the engagement and disengagement of two clutches to achieve power transfer and switching. Table 1 provides the engagement timing for gears 1–6 in this transmission.19,20

Power transmission system structure.
Clutch engagement timing table.

Transmission kinematics analysis
To obtain the speed characteristics of each planetary gear mechanism during the operation of the transmission, it is necessary to perform kinematic analysis of the transmission. By selecting the input shaft angular velocity and torque direction as the positive direction, and based on the speed characteristic equation of the planetary gear sets, 21 we can obtain:


Where
Based on the structure of the compound planetary gear set, it can be seen that the transmission has three elements interconnected. To complete power transmission, one of the clutches in CL/CH/CR and one of the clutches in C1/C2/C3 need to be engaged. From the engagement timing table (Table 1) of the transmission, we can see that in first gear, the CL and C1 clutches are engaged; in second gear, the CL and C2 clutches are engaged. During the 1–2 shifting process, the CL clutch remains engaged, the C1 clutch gradually disengages, and the C2 clutch gradually engages. Therefore, the system has two degrees of freedom. Based on the equal angular velocities between the interconnected components, the 1 and 2 shifting process satisfies:



Select

Where








Transmission dynamics analysis
This paper focuses on the analysis of a planetary gear transmission, disregarding clearances and friction between the planetary gears. The planetary gear system and shaft system are assumed to be rigid bodies, and the influence of system damping is neglected. The dynamics analysis of the 1–2 gear shifting process is carried out using Lagrange’s equations. 22
The system has two degrees of freedom during the shifting process, and two generalized coordinates need to be defined. Therefore, the transmission input shaft angle and output shaft angle are selected as the generalized coordinate system, that is,

Where
According to the principle of virtual work for active forces shown in equation (16), the two generalized forces of the system can be expressed as equations (17) and (18).



The Lagrange function

Where
Due to the fact that the potential energy of the system remains constant during power transmission in the gearbox, the kinetic energy of the system can be expressed as:

Where
The basic form of the Lagrange equation can be expressed as:

According to the equations (6)–(21), it can be obtained that:

Where:






It can be seen from equation (22) that,
According to the iterative algorithm with a variable forgetting factor, the optimization objective with forgetting factor can be obtained as follows:

Where
The expression of recursive least squares method with forgetting factor is as follows. 23



According to equation (22), the sample set and parameter set of the system to be identified are as follows:


According to the power conservation of planetary gears, the torque corresponding relationship of each planetary row can be determined as follows:

Where
Therefore, the torque of clutches

During the identification process, the test bench can collect the input shaft speed, output shaft speed, and torque of the transmission, so the sample set of
Equivalent inertia identification results.

Powertrain modeling
The engine is modeled as a torque source element, where the actual output torque


Where
The hydraulic torque converter is a hydraulic coupling mechanism that connects the engine and the transmission. Its primary characteristic parameters, such as the torque ratio, torque converter efficiency, and pump-turbine torque coefficient, can characterize the performance of the hydraulic torque converter. The dynamic equation describing the dynamics of the hydraulic torque converter is as follows:



Where
Based on the analysis of the kinematics and dynamics of the transmission, the dynamic equation of the transmission can be represented by the following equation:




The Karnop model is used for clutch modeling. When the clutch is sliding, the dynamic friction torque

Where the sliding friction torque can be expressed as:


In the above formula,
The acting radius r of the clutch friction plate can be directly defined according to the following formula.

Where
The road resistance

The output end of the transmission transmits power to the two half-shafts connected to the wheel through the main reducer. Assuming that the torque of the two half-shafts is the same, the dynamic equation can be expressed as follows:

The driving efficiency of tracked vehicles can be expressed as:

In the above formula,
Research on improving shift quality based on engine coordinated control
The shift quality is usually evaluated by the jerk and sliding friction work loss, 27 such as equations (53) and (54).


Where
Based on the developed dynamic powertrain system simulation model, the simulation of the 1–2 upshifting process without coordination control is conducted. In the simulation, the vehicle is set to start in first gear, with the engine torque

Dynamic simulation results of 1 liter 2 shifting process without coordinated control.
From Figure 2, it can be seen that the simulation results of various parameters are consistent with the operating conditions. The entire shifting process from first to second gear can be divided into four stages: pre-shift, torque phase, inertia phase, and post-shift. In the beginning of the torque phase, the oil pressure of the C1 clutch rapidly decreases, while the C2 clutch starts to engage slowly. At this point, the C1 clutch is not completely disengaged, and the C2 clutch is not fully engaged yet. The resistance experienced by the transmission (mainly due to the friction of the C2 clutch) does not increase significantly, so the input shaft speed of the transmission continues to increase gradually. When the torque phase ends and the inertia phase begins, the oil pressure of the C1 clutch continues to decrease, while the oil pressure of the C2 clutch keeps increasing. The C2 clutch is in a state of sliding friction. Through dynamic analysis of the shifting process, it is known that at this stage, the output torque of the transmission is mainly determined by the sliding friction torque of the C2 clutch. When the inertia phase ends, the C2 clutch is fully engaged and the C1 clutch is completely disengaged. At this point, the input shaft speed of the transmission is equivalent to the product of the output shaft speed and the second gear transmission ratio, indicating that the transmission has entered the second gear stage.
Many researchers have pointed out that improving the shifting quality can be achieved by coordinating and controlling the engine torque (fuel supply or intake air) during the shifting process. However, current research has not delved into the relationship between engine torque control in different phases (torque phase and inertia phase) and shifting quality. Although optimizing the clutch oil pressure variation curve during the shifting process can improve the shifting quality, it is challenging to apply the optimized oil pressure curve to all upshifting and downshifting processes, leading to certain application limitations. Therefore, based on keeping the clutch oil pressure unchanged, this study formulates six different coordinated control strategies as shown in Table 3 to investigate the impact of engine torque coordination control during the shifting process on shifting quality.
Coordinated control strategy for shift process.

The simulation results of the six control strategies are obtained and shown in Figures 3 and 4. From the simulation results, it can be observed that all six formulated coordinated control strategies are more effective in reducing the peak output shaft torque, impact severity, and sliding friction work compared to the case without coordinated control. However, the degree of improvement in shifting quality varies among the different strategies.

Variation of torque, impact, and sliding friction work loss of strategy 1/2/3 output shaft.

Variation of torque, impact, and sliding friction work loss of output shaft of strategy 4/5/6.
The simulation results of six control strategies are obtained through simulation, as shown in Figures 3 and 4. From the simulation results, it can be seen that the six coordinated control strategies formulated can reduce the peak torque, impact, and sliding friction work loss of the transmission output shaft more than the non-coordinated control, but the improvement of the shift quality is different.
Strategies 1, 2, and 3 mainly involve coordinating control at the beginning of the torque phase. From the variation of the transmission output shaft torque in Figure 3, it can be seen that reducing the engine’s output torque at the start of the torque phase creates a “torque pit.” The smaller the torque coordinated by the engine control, the more pronounced the “torque dip” becomes. If the same engine torque is applied during the torque phase (Strategies 2 and 3), the shape of the “torque dip” is similar. If the coordination control time is the same (Strategies 1 and 2), the smaller the engine’s coordinated torque, the lower the peak value of the output shaft torque. When the engine’s coordinated torque is 200
Strategies 4, 5, and 6 primarily involve coordinated control during the inertia phase. From the torque variation of the transmission output shaft shown in Figure 4, it can be observed that strategies 5 and 6 have lower torque peaks compared to strategy 4. Under the same coordinated control torque from the engine (strategies 5 and 6), a longer coordination control time results in a larger negative jolt (seen in Figure 4). Based on the exploration of these patterns, the following conclusions can be drawn:
(1) Without changing the clutch oil pressure, improving shift quality can be achieved by adopting engine coordinated control strategies. The three parameters – coordination control start time, coordination control duration, and coordination control engine torque – determine the quality of the shift;
(2) Under reasonable coordination control parameters (strategies 2 and 5), although coordinating control during the torque phase can reduce torque peaks, impact, and sliding friction work loss more effectively compared to coordinating control during the inertia phase, it may introduce an additional “torque pit” during the torque phase;
(3) To achieve optimal shift quality, optimization of the coordination control start time, coordination control duration, and coordination control engine torque is necessary.
Multi-objective parameter optimization for improving shift quality
Multi-objective parameter optimization strategy based on NSGA-II
NSGA-II is one of the most popular multi-objective genetic algorithms. It reduces the complexity of non-dominated sorting genetic algorithms and has the advantages of fast execution speed and good convergence of solution sets, making it a benchmark for other multi-objective optimization algorithms. According to the aforementioned research, using engine coordinated control strategy during shifting process can enhance the shifting quality. However, the selection of three parameters, namely the external control torque


To investigate the improvement effect of coordinating the three optimal parameters in different phases (torque phase and inertia phase) on shifting quality, two optimization strategies were developed as shown in Figure 5. The optimization parameters for both strategies are the same: external control torque

Principle of two optimization strategies.
Therefore, the number of optimization variables is 3 and can be represented as follows:

Table 4 shows the constraints of the optimization parameters of Strategy I and II.
Constraints of the two strategies.

In this study, the NSGA-II algorithm was implemented with a population size of 100, a maximum iteration count of 50, a crowding distance coefficient of 0.35, and a fitness function deviation of 1e-6. The optimization results for the two strategies are shown in Table 5. From Table 5, it can be observed that the root mean square values of impact for optimization strategies 1 and 2 are 2.71 and 4.19 m/s3, respectively. This represents a reduction of 48.2% and 19.9%, respectively, compared to the case without coordinated control. The Pareto front of the objective functions obtained through optimization is shown in Figure 6. From the Pareto optimal results, it can be seen that using engine coordinated control strategy improves the shifting quality. Strategy 1 has a broader range of non-dominated solutions compared to Strategy 2, and it also provides better non-dominated solutions than Strategy 2. Hence, the NSGA-II algorithm can obtain the optimal solutions for both optimization strategies.
Optimization results of coordinated-control strategy during gear shift.


Pareto boundary of two optimization strategies.
Hardware in the loop simulation verification and analysis
To validate the effectiveness of the proposed NSGA-II algorithm-based multi-objective optimization strategy in improving shifting quality, hardware-in-the-loop simulations were conducted. The test bench setup is shown in Figure 7. The powertrain system model runs in real-time simulation, considering the engine’s effective torque and throttle pedal as a simple linear relationship. Specifically, 0%–100% throttle opening corresponds to 0–5000 N·m torque. Gear positions and throttle inputs are simulated using external devices. An integrated controller sends engine control torque signals, and the signals are communicated through a CAN bus. Real-time monitoring is carried out through a designed interface. During the experiment, the procedure involved engaging first gear using the gear lever and then pressing the throttle pedal to 100% opening. When the vehicle speed reached 6.2 km/h, second gear was engaged. For comparative analysis, three sets of shift tests were conducted: uncoordinated control, coordination control with Strategy 1 optimized by the NSGA-II algorithm, and coordination control with Strategy 2 optimized by the NSGA-II algorithm. After multiple tests, the results of the upshift dynamic process experiments were obtained, as shown in Figure 8.

Hardware-in-the-loop simulation bench.

Shift dynamic process of two optimization strategies.
From the experimental results, it can be seen that Optimization Strategy 1 has a coordination control time that is 0.5 s earlier and a longer duration of 0.17 s compared to Optimization Strategy 2. The output shaft torque peak value for Optimization Strategy 1 is 6875 N·m, which is a 29% decrease compared to no coordination control. The output shaft torque peak value for Optimization Strategy 2 is 8570 N·m, which is a 12% decrease compared to no coordination control. From the variation in turbine speed, it can be seen that both Optimization Strategy 1 and 2 reduce the engine output torque during the shifting process. This allows for a shorter synchronization time for the clutch, which is beneficial for reducing frictional losses. However, the decrease in turbine speed is more significant. The longer the engine power interruption time, the faster the turbine speed decreases during the inertia phase. Therefore, while using coordination control to improve shifting quality, there will be a loss in vehicle power. From the variation in vehicle speed, it can also be seen that at the sixth second, the vehicle speed without coordination control can reach 14.8 km/h, while the vehicle speed with Optimization Strategy 1 and 2 is 12.9 and 13.4 km/h respectively. This represents a power reduction of 12.8% and 9.5%. Therefore, to improve shifting quality while also considering power, it is necessary to carefully select the coordination control parameters.
Figures 9 and 10 show the variation in impact and sliding friction work loss. The peak values of impact and sliding friction work loss during the shifting process without coordination control are 10.25 m/s3 and 46,218 J, respectively. For Optimization Strategy 1, the peak values of impact and sliding friction work loss are 7.68 m/s3 and 21,574 J, representing a reduction of 25% and 53.3% compared to no coordination control. For Optimization Strategy 2, the peak values of impact and sliding friction work loss are 9.75 m/s3 and 38,243 J, representing a reduction of 4.8% and 17.3% compared to no coordination control. Therefore, when the engine torque is stably output during the shifting process, Strategy 1 optimization shows better results in improving shifting quality. In other words, using engine coordination control strategy during the torque phase has a more pronounced effect on enhancing shifting quality.

Comparison of the impact of two optimization strategies.

Comparison of sliding friction work loss of two optimization strategies.
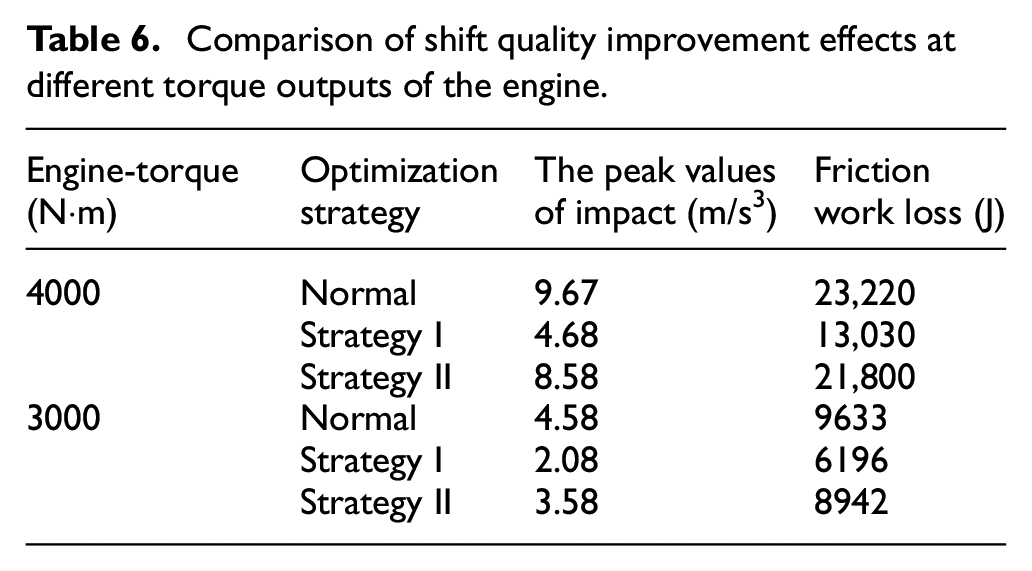
In order to verify the reliability of the proposed optimization strategies, coordinated control of the gear shifting process was conducted for engine torques of 4000 and 3000 N·m respectively, and the simulation results are shown in Table 6. It can be observed that when the engine torque is stabilized at 4000 N·m, the coordinated control of gear shifting based on optimization strategy 1 reduces the peak impact and sliding friction work by 51.6% and 43.9% respectively compared to no coordinated control. Similarly, using optimization strategy 2 for coordinated control of gear shifting reduces the peak impact and sliding friction work by 11.3% and 6.1% respectively compared to no coordinated control. When the engine torque is stabilized at 3000 N·m, the control effect of optimization strategy 1 is also superior to that of optimization strategy 2. Therefore, the multi-objective parameter optimization strategy proposed in this paper, which is based on coordinated engine control to improve shift quality, demonstrates a certain level of reliability.
Comparison of shift quality improvement effects at different torque outputs of the engine.
Conclusion
This paper proposes a multi-objective parameter optimization strategy based on coordinated engine control to improve shift quality. The strategy considers the external control torque of the engine, the start of fuel cut-off timing, and the duration of fuel cut-off as optimization parameters. The sliding friction work loss and impact during the shifting process are used as performance indicators. The NSGA-II algorithm is employed to achieve multi-objective optimization of the coordinated control parameters, resulting in Pareto fronts of non-dominated solutions for torque phase and inertia phase coordination control, respectively. Based on the results of parameter optimization, a comparison of the effects of coordinated control in different phases (torque phase and inertia phase) reveals that when the engine torque is stably output during the shifting process, using engine coordinated control in the torque phase yields more noticeable improvements in shift quality. When applying the proposed optimized strategy for shift coordination control, it is observed that the shift quality is improved regardless of the engine’s constant torque output. Therefore, this strategy demonstrates a certain level of reliability. However, it has also been observed that using engine coordinated control (fuel cut-off control) to improve shift quality may weaken vehicle power. If both shift quality and power performance need to be improved simultaneously, a trade-off in the selection of coordinated control parameters is required. The analysis in this paper primarily focuses on the shifting process under the condition of the engine’s constant torque stable output, without considering the transient characteristics of the engine. In future work, a more accurate engine model will be established to develop control strategies accordingly.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by China Basic Research Project [No. 202020329201].