
Abstract
To achieve high-quality control of PMSM with parameter uncertainties, a nonlinear smooth fractional order sliding mode composite control (NSFOSMCC) strategy is designed in this paper. This approach incorporates a novel nonlinear smooth fractional order sliding mode controller, a novel adaptive super-twisting (AST) algorithm, and a modified nonlinear extended state observer (ESO) to achieve enhanced motor performance. To effectively overcome the disadvantages of simplicity and toughness associated with the conventional fractional order sliding mode controller, a novel nonlinear smooth fractional order sliding mode controller is designed. A novel AST technique is introduced to effectively weaken chattering issues. The modified nonlinear ESO is used to estimate the uncertainty parameters of the PMSM. By combining the modified nonlinear ESO with the latest sliding mode controller, a new composite controller called NSFOSMCC strategy is developed for PMSM. The proposed NSFOSMCC strategy, utilizing a combination of “feedforward plus feedback,” is implemented for PMSM with parameter uncertainties. The reliability and stability of the controller are thoroughly established through the utilization of the Lyapunov stability theorem. Furthermore, comparative results show strong evidence supporting the effectiveness of the novel composite control strategy.
Keywords
Introduction
The development of the current technology
The permanent magnet synchronous motor (PMSM) has been the subject of extensive research for decades, owing to its many distinct advantages, such as minimal energy consumption, reliable performance, and simple design. As a result, the PMSM has found widespread use in applications like elastic servo systems, 1 electric vehicles, 2 electric aircraft, 3 flexible servo riveting systems, 4 airborne star tracker driven, 5 and other industrial fields. From the perspective of control theory research, the control strategies currently being utilized often face challenges in meeting control requirements due to the complex multivariate features, coupling, and nonlinearity present in the dynamic model of PMSM. Hence, the rejection of uncertainty and disturbance is a crucial objective in the PMSM controller. Though conventional PID control can be easily accomplished without the knowledge of controlled plants and is widely employed in industrial processes, it falls short when dealing with nonlinear plants, fluctuating disturbances, and uncertainties. In the case of controlling PMSM with parameter uncertainties-as discussed in this article-attaining satisfactory control performance with PID is challenging.
As a robust feedforward control method, the nonlinear extended state observer (ESO) was proposed by Han.6,7 Because of its ease of selecting parameters and high estimation accuracy, the nonlinear ESO has been designed and implemented in various applications such as active hydro-pneumatic suspension, 8 agricultural quadrotor UAV, 9 autonomous underwater vehicles, 10 airships, 11 and so on. After years of progress, the sliding mode control (SMC) strategy has emerged as a leading variable structure control method within the control field. Its popularity has cemented its status as a coveted control strategy. With the development of the sliding mode control theory, various sliding mode control theories have gradually formed. Among the numerous SMC strategies, the fractional order SMC method combines the advantages of the fractional order calculus operation, and the SMC strategy, with a small steady-state error, high flexibility and strong robustness.12–14 Due to its numerous advantages, this particular area of control has garnered significant attention from many research scholars. In El Ferik et al.’s 15 paper, a fractional order SMC was designed for the quadrotor slung-load system. In another research, 16 a fractional order SMC was designed by Samuel et al. for trajectory tracking of the robot manipulator. In Sun et al.’s 17 paper, a fractional order SMC was used for the joint angle tracking control of the wearable exoskeletons.
To capitalize on the benefits of both feedforward and feedback control, a fractional order sliding mode composite control (FOSMCC) is proposed by many scholars. This innovative approach integrates the fractional order SMC theory and the nonlinear ESO. The nonlinear ESO is placed in the feedforward channel, while the fractional order SMC operates in the feedback channel. In recent times, an increasing number of scholars in control disciplines have studied and utilized the FOSMCC strategy. The FOSMCC strategy has been widely utilized, for instance, in hybrid drive wind turbines, 18 robots, 19 active vehicle suspension systems, 20 piezoelectric actuators, 21 and so on. Furthermore, the process of adding or subtracting fractional differentials and integrals of state variables of the PMSM in the FOSMCC strategy is overly simplistic and arduous, rendering it difficult to achieve top-notch control of the PMSM drives with parameter uncertainties quality. To enhance the control system, it’s crucial to contemplate alternative methods that can tackle these limitations. By exploring innovative methods and techniques, we can optimize the performance and efficiency of systems, while simultaneously ensuring that they meet the requirements for diverse applications. 22 To effectively address the issues posed by the conventional FOSMCC strategy, the study 23 introduces a nonlinear function into the approach. The non-linear function is continuous, however, it lacks differentiability. As a result, the non-differentiable non-linear function can give rise to the occurrence of high-frequency flutter phenomenon.
Main contribution
Based on the findings of previous research, this paper proposes a new nonlinear smooth fractional order sliding mode composite control (NSFOSMCC) strategy for PMSM drives, which effectively addresses the impact of parameter uncertainties. The innovative NSFOSMCC strategy integrates a nonlinear ESO, a novel adaptive super-twisting (AST) approaching law, and a nonlinear smooth fractional order sliding mode surface (NSFOSMS). The specific analysis is performed as follows, the nonlinear ESO is first proposed to track external disturbance and uncertainties of the PMSM dynamic model. Secondly, a new NSFOSMS has been developed and utilized to construct a nonlinear smooth FOSMC. This innovative approach offers faster finite-time convergence and superior resistance to saturation compared to the conventional FOSMC. Then, a novel AST structure has been built to weaken the chattering phenomenon effectively, resulting in an even greater improvement in the robustness of the system. Finally, the constructed NSFOSMCC strategy is designed by the novel nonlinear smooth fractional order SMC and the novel AST approaching law. On the whole, compared with the existing composite control strategy of PMSM, the major contributions of this article are marked in the following terms:
A novel nonlinear smooth fractional order sliding mode control strategy is proposed based on a unique nonlinear smooth fractional order sliding mode surface, which can effectively provide faster convergence and stronger resistance to saturation ability. The nonlinear smooth fractional order sliding mode control strategy effectively overcomes the disadvantages of simplicity and toughness associated with the conventional fractional order sliding mode controller.
This paper is the first to propose an NSFOSMCC strategy integrating a modified nonlinear ESO, a novel nonlinear smooth fractional order sliding mode control strategy, and a novel adaptive approaching law. The proposed NSFOSMCC strategy, utilizing a combination of “feedforward plus feedback,” is implemented for PMSM systems. The modified nonlinear ESO is used to estimate the uncertainty parameters of the PMSM.
The Lyapunov stability theorem provides complete proof of the stability of the proposed NSFOSMCC algorithm.
Through comparative based on Matlab software verification, the superiority of the proposed composite control strategy is also demonstrated.
Problem statement
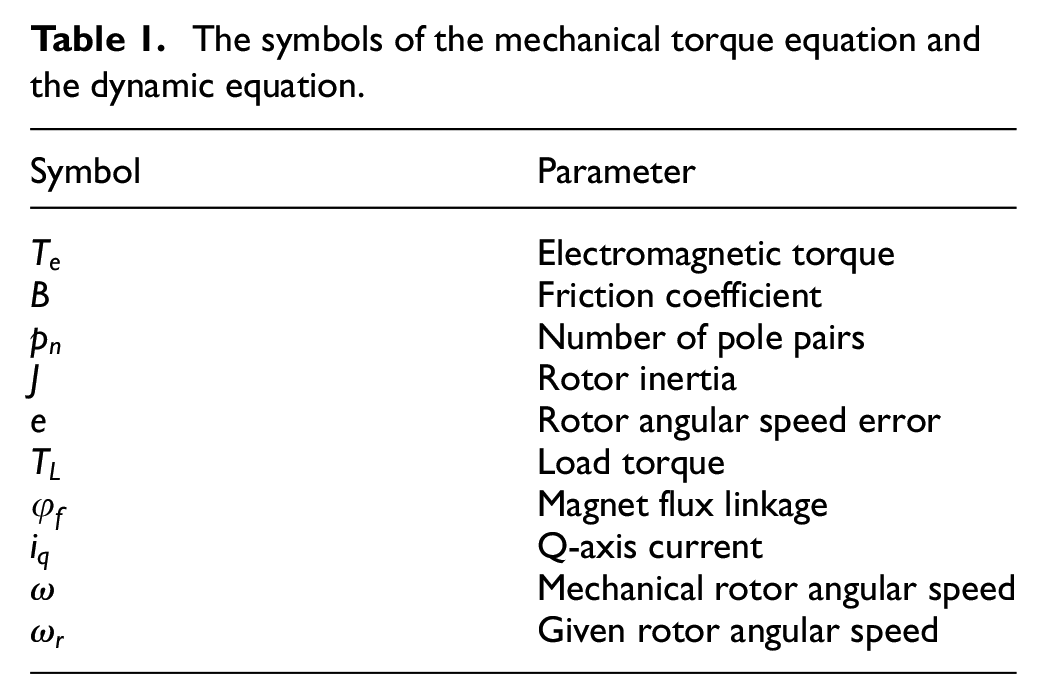
For an uncertain nonlinear servo system, the fundamental mathematical equations of the PMSM model are the mechanical torque equation and the dynamic equation. These equations take into account the uncertain and unpredictable nature of the system, which provides a reliable framework for analysis and optimization24,25:


Table 1 illustrates the meanings of the symbols featured in the equations above.
The symbols of the mechanical torque equation and the dynamic equation.
The dynamic equation of the system model (2) can be represented as:

where
The model (3) is written under ideal circumstances. However, the PMSM model is naturally prone to be affected by uncertainty in system parameters, encompassing two key aspects: (a) internal parameters will vary over time; (b) load as the main representative of the external parameters will mutations. Considering both known and unknown disturbances, including internal disturbances caused by parameter perturbations as well as external disturbances, the system model (3) can be aptly characterized as follows:

where
In this paper, a refined technique is adopted to effectively manage the intensity and orientation of the stator current in the synchronous rotating coordinate system, thereby facilitating the separation of the d-axis and q-axis elements. This successful separation of the control of the magnetic field and torque allows for increased efficiency and greater precision in our results.
Fractional order sliding mode composite control design using nonlinear ESO
The primary objective of this paper is to ensure that the motor speed aligns with the desired value. The ultimate aim of the control is to reduce
The nonlinear ESO
To conveniently utilize nonlinear ESO scheme, define
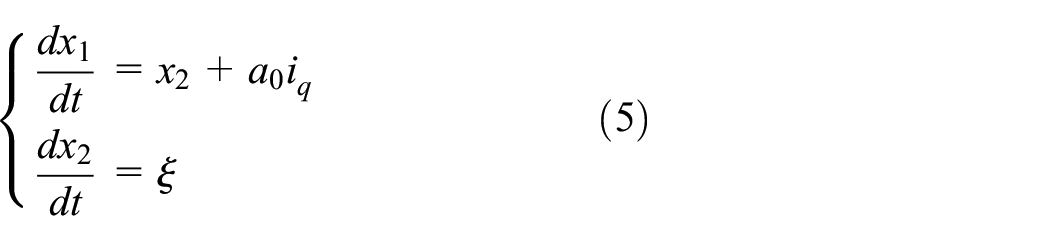
where
Similarly, the classical nonlinear ESO based on the model of the system (5) is designed as 6 :

where
The nonlinear function

where
The existing fractional order sliding mode composite control strategy
In the previous articles, the expression of the conventional fractional order sliding mode surface (FOSMS) is shown as27–30:

where
Then, the previous article has adopted the exponential reaching law. 32

where
According to (5), (6), (8), and (9), we can get:

Then, the conventional fractional order sliding mode composite control (FOSMCC) strategy based on the conventional FOSMS (8), the exponential reaching law (9) and the nonlinear ESO (6) can be given as 27 :

In order to overcome the disadvantages of simplicity and tough of the conventional FOSMS (7), a nonlinear fractional order sliding mode surface (NFOSMS) combining the well known nonlinear function

where
To effectively weaken the issue of chattering and enhance control performance during the reaching phase, the previous articles have chosen the following AST reaching law. 33

where the adaptive control term is formulated as 33 :

where
According to (5), (6), (12), and (13), we can get:
Then, the nonlinear fractional order sliding mode composite control (NFOSMCC) strategy based on the NFOSMS, AST reaching law and the nonlinear ESO can be obtained 23 :

The proposed fractional order sliding mode composite control strategy
To ensure high-precision tracking control of PMSM with parameter uncertainties, the NFOSMCC structure is modified to improve its chattering suppression capability. The modifications of the NFOSMS and a novel AST algorithm are provided, respectively. We propose a novel fractional order sliding mode composite control design in this section.
To overcome the properties of discontinuous and hopping of the NFOSMS, the following novel NSFOSMS is proposed.

where
Thus, compared with conventional FOSMS (8) and the NFOSMS (12), the improvement of the novel sliding mode surface is shown in the following two aspects:
It should be noted that the novel NSFOSMS (17) is continuous, so the chattering from the characteristic of jumping is avoided.
When the error of the system is large, the nonlinear term of the nonlinear function will limit the error, when the error of the system is small, the linear term of the nonlinear function will amplify the error.
With the above-mentioned NSFOSMS algorithm, both fast convergence and high precision can be efficiently achieved during the sliding mode phase. Furthermore, to ensure good control performance in the reaching phase, a novel AST scheme will be implemented. The proposed AST approach law is designed as:

with the adaptive parameters

where

where
Combining the designed the NSFOSMS (17) and the AST scheme (18), the expression is obtained as:

Equation (21) can be written as:

By replacing (5) into equation (22), equation (22) becomes:

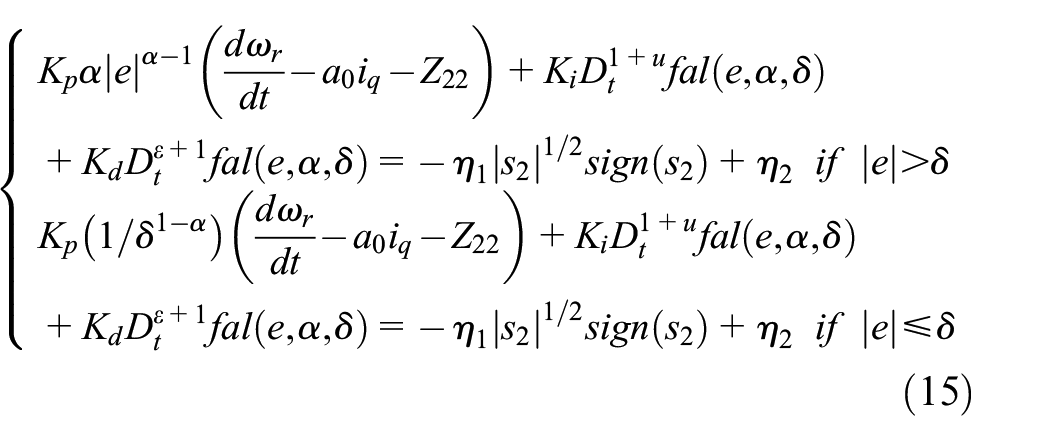
Therefore, the control scheme of our method can be summarized as follows:

To guarantee a straightforward yet effective control system, we utilize the modified nonlinear ESO scheme (15) to obtain

with adaptive laws given in (19) and (20). The stability proof of the closed-loop control system is given in the following chapters. Meanwhile, the schematic diagram of our proposed method is depicted in Figure 1. The space vector PWM (SVPWM) strategy is adopted for PWM generation, where the SVPWM strategy is applied to each single three-phase voltage source inverter.

SVPWM control structure diagram of the proposed NSFOSMCC strategy.
To implement the proposed nonlinear ESO-based NSFOSMCC control scheme (25) in practical applications, we only require the necessary signal
Comparing our innovative control scheme (25) with the recently methods (11) and (16), it is evident that they share similar structures. All three are based on the nonlinear ESO scheme, thereby providing the advantage of a model-free feature. On the other hand, the differences are also very obvious. For the nonlinear ESO-based FOSMCC (11), it uses traditional FOSMS with linear error dynamics and the exponential reaching law method scheme with constant parameters. For the nonlinear ESO-based NFOSMCC (16), it uses an NFOSMS and a well-known AST scheme. Our proposed method incorporates a new NSFOSMS, an innovative AST scheme, and a nonlinear ESO. With these three groundbreaking elements, our control strategy guarantees both faster convergence and superior accuracy compared to the current methods (11) and (16). These assertions will be substantiated through our comparatives.
Stability analysis
Based on the Lyapunov stability analysis theory and inspired by the proof steps in the references,14,33–35 the detailed proof process for the stability of the proposed NSFOSMCC strategy is given as:

where

where

with

where the components of the state decay toward 0 like

where
First, make the following setting:

where
For clarity, to surpass the expectations mentioned earlier, we are pleased to introduce an innovative vector:

Equation (32) is derived as:

By substituting (26) into (33), we can get:

The inspiration comes from previous research, the Lyapunov candidate function is selected as following:

Let:

where
On the other hand, the following inequality will remain valid.

Differentiating

where
The following inequality will hold:

where

Differentiating (25) with respect to time, we have:

Substituting (38) into (41) yields:

Then, substituting the vector (39) into (42), we have:

Based on the well-known inequality

where
Inequality (44) can be rewritten as:

where

According Assumption 1 and
Based on Lemma 1, the time can be calculated as:

According to (47), we can easily conclude that

The sliding mode dynamics (48) can be expressed in matrix form as:

To apply the Lemma 2, we let

According to Lemma 2, we know that the condition of the eigenvalues of matrix

Then, the speed tracking error
Comparative results and discussion
To validate the effectiveness and benefits of our proposed approach, we conduct a comparative results of PMSM. Two other robust control schemes are taken to simulate for comparisons with our proposed method, that is, the FOSMCC (10) and NFOSMCC (15) control schemes. The primary PMSM parameters utilized in the comparatives are presented in Table 2. The FOSMCC strategy parameters are listed in Table 3 while the NFOSMCC strategy parameters are listed in Table 4. The proposed NSFOSMCC strategy parameters are listed in Table 5. To minimize the impact of parameter selection on the control effect, we adopt the parameter setting method found in works of literature,38,39 where parameters with identical meanings are assigned similar values in different controllers.
The PMSM parameters utilized in the comparatives.

The FOSMCC strategy parameters utilized in the comparatives.

The NFOSMCC strategy parameters utilized in the comparatives.

The proposed NSFOSMCC strategy parameters utilized in the comparatives.

Tracking performance
To highlight the superiority of the proposed composite control strategy in comparison to the existing composite control strategy, this paper will complete the comparative results of the PMSM without load, with a load. When setting the controller parameters such as Tables 3–5, under no-load, the speed curves of the proposed NSFOSMCC strategy and the existing composite control strategy are shown in Figure 2. Once more, with

(a) Time responses of speed without load at a given value of 100 rad/s; (b) the enlarged section image (a); (c) time responses of speed without load at a given value of 50 rad/s; (d) the enlarged section image (c); (e) time responses of speed without load at a given value of 10 rad/s; (f) the enlarged section image (e); (g) time responses of speed without load at a given value of 3 rad/s; (h) the enlarged section image (g).

(a) Time responses of speed with 5 Nm load; (b) the enlarged section image (a); (c) time responses of speed with 1 Nm; (d) the enlarged section image (c); (e) time responses of speed with 10 Nm; (f) the enlarged section image (e); (g) time responses of speed with 8 Nm; (h) the enlarged section image(g).

(a) Time responses of sliding surfaces at a given value of 100 rad/s; (b) Time responses of sliding surfaces at a given value of 50 rad/s.
In order to showcase the impressive speed-tracking performance of both conventional composite control and proposed composite control methods, a typical sinusoidal reference is employed. The results obtained from this test are depicted in Figure 5. Ramp and step change speed references are employed. The results obtained from this test are depicted in Figure 6. Upon close observation, it is evident that the tracking error for the reference is considerably lower in the proposed composite control method when compared to the conventional composite control method.

(a) Tracking performance of three control strategies methods without load under sinusoidal reference; (b) and (c) the enlarged section image (a); (d) the tracking error waveform of three control strategies without load; (e) tracking performance of three control strategies methods with 5 Nm load under sinusoidal reference; (f) and (g) the enlarged section image; (h) the tracking error waveform of three control strategies with 5 Nm load.

(a) Tracking performance of three control strategies methods under ramp reference; (b) the enlarged section image (a); (c) the tracking error waveform of three control strategies under ramp reference; (d) tracking performance of three control strategies methods under step reference; (e) the tracking error waveform of three control strategies under step reference.
Tolerance ability of external parameters uncertainties
An abrupt change in external load is introduced for further verification. Figure 7 depicts the contrastive speed response curves of the existing and proposed control strategies when subjected to external parameter mismatches. Table 6 presents the data on the Speed of Stable Time (SST), Speed Perturbation Amplitude (SPA), and Response Time of the Torque (RTT) for the different control strategies. It is clear from Table 5 and Figure 5 that the motor speed under the proposed composite strategy has a shorter velocity stable time and response time of the torque and a smaller velocity perturbation amplitude. The comparative results clearly showcase the exceptional ability of the proposed NSFOSMCC strategy to withstand external parameter uncertainties.

(a)The speed waveform for sudden loading form 0–5 Nm; (b) The enlarged section image (a); (c) The torque waveform for sudden loading form 0–5 Nm; (d) The enlarged section image (c); (e)The speed waveform for sudden unloading form 5–0 Nm; (f) The enlarged section image (e); (g) The torque waveform for sudden loading form 5–0 Nm; (h) The enlarged section image (g).
Comparison of the speed curves during external parameters uncertainties.

Tolerance ability of inner parameter uncertainties
In order to better verify that the proposed NSFOSMCC strategy has strong robust characteristics, the inner parameter is changed at a runtime of 1 s suddenly. The inconsistency of the rotor inertia variable

(a) Time responses of speed of three control strategies under inner parameter mismatches; (b) the FOSMCC strategy; (c) the NFOSMCC strategy; (d) the proposed NSFOSMCC strategy.
Comparison of the speed curves under inner parameter uncertainties.
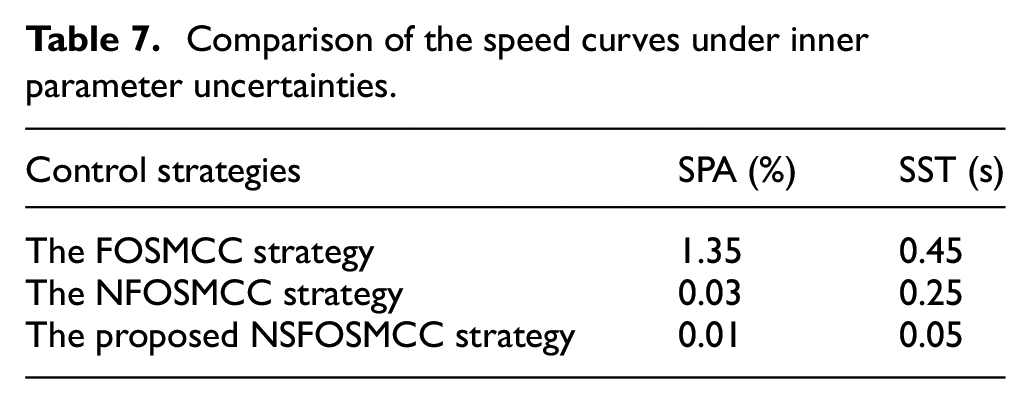
It can be seen that the speed fluctuation of the FOSMCC strategy is the largest and that of the NFOSMCC strategy is relatively smaller, while the speed fluctuations of the proposed NSFOSMCC strategy is the smallest, which can also be reflected by the harmonics of the PMSM shown as Figure 9. Due to the varying impact of speed error on controllers, the performance of speed control has been significantly affected by parameter uncertainties, leading to significant speed fluctuations, it is indicated clearly in speed total harmonic distribution (THD). Figure 9 displays the THDs of the speed of three control methods at their rated speed of 100 rad/s. According to Figure 9, it can be observed that the speed of THD of the FOSMCC strategy is 82.75%. The NFOSMCC strategy exhibits the THD of the speed is 72.93%, while the NSFOSMCC strategy records the THD of the speed is 60.57%. The comparative results confirm that the proposed method exhibits lower levels of harmonic distortion. This serves as further validation of the inherent superiority of the proposed control approach. The speed control issue of the PMSM under the unknown disturbances has been addressed in this brief with the newly proposed NSFOSMCC strategy. Comparative results show strong evidence supporting the effectiveness of the novel composite control strategy.
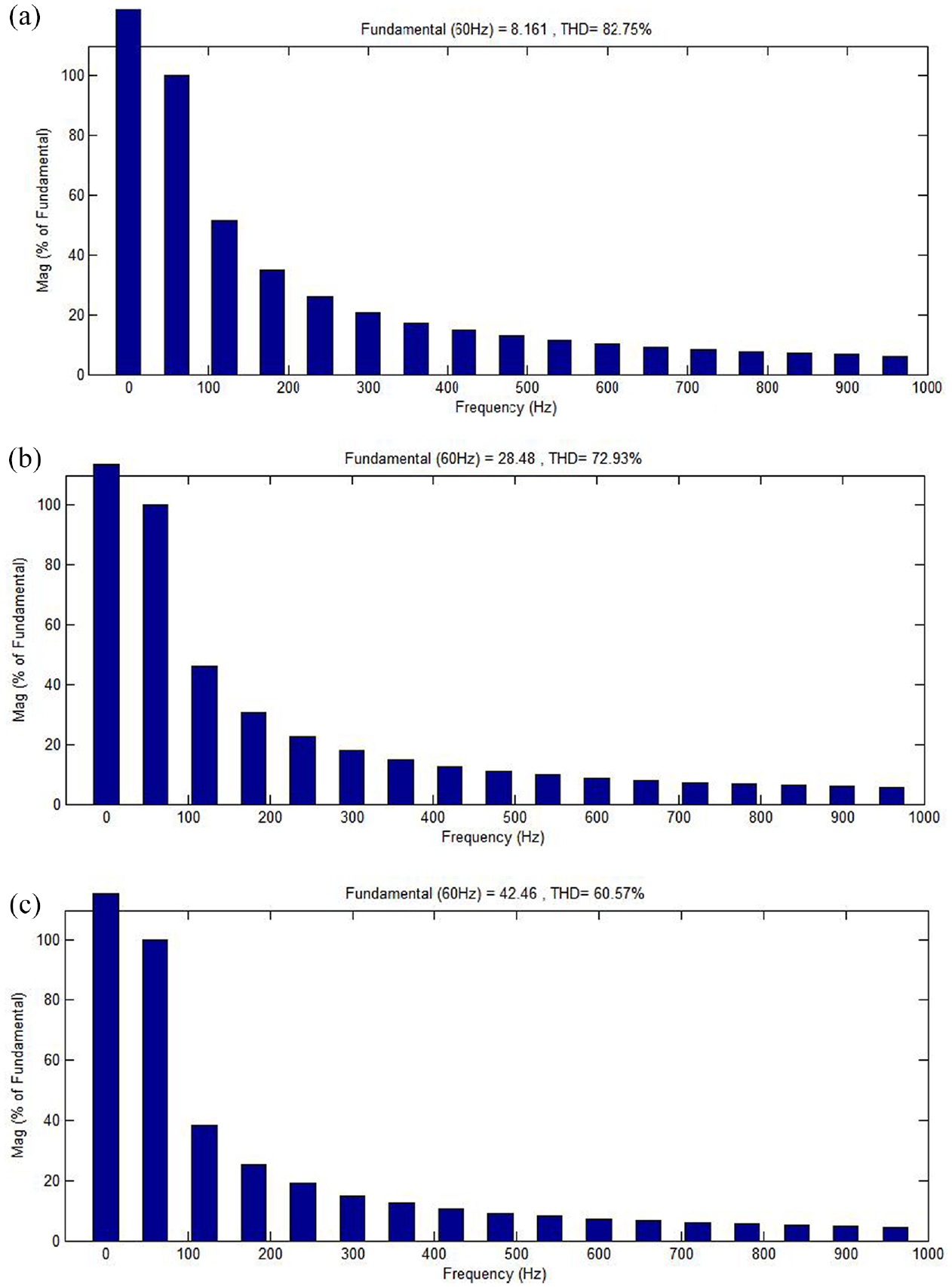
(a) The THD of the speed under the FOSMCC strategy. (b) The THD of the speed under the NFOSMCC strategy. (c) The THD of the speed under the proposed NSFOSMCC strategy.
Conclusions
To obtain a satisfactory control performance of PMSM drives with parameter uncertainties, a composite controller is proposed in this paper. The main work of this article includes the following:
The novel control strategy is called the NSFOSMCC method, which utilizes a novel NSFOSMS, a novel AST algorithm, and a modified nonlinear ESO.
The new NSFOSMS is based on a unique nonlinear smooth function, which can effectively provide stronger resistance and faster convergence to saturation ability.
Thanks to the implementation of the novel AST algorithm, the need for boundary information is no longer necessary.
The modified nonlinear ESO component is utilized to derive the remaining lumped system dynamics.
The reliability and stability of the controller approach have been firmly established through the utilization of the Lyapunov stability theorem.
Our innovative control strategy has been validated and proven to be superior through comparative results.
Further validation of the NSFOSMCC strategy will be tested using a cSPACE semi-physical control system. The semi-physical control system combines TI TMS320F28335 DSP and Matlab/Simulink for accurate validation and analysis.
Footnotes
Appendix
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the University Natural Science Research Project of Anhui Province (no. 2022AH051752, no. 2022AH051759, no. KJ2018A0483), by the Anhui Province University Collaborative Innovation Project (no. GXXT2022021) and Provincial Foundation for Excellent Young Talents of Colleges and Universities of Anhui Province (no. GXYQ2022094).