
Abstract
The paper presents results of computer simulation and experimental observations with the main objective of explaining the role of Poisson’s contraction phenomenon in the mechanism of initiating and maintaining squeeze-film action through which light and planar objects can be levitated. Initial and centrally located shallow dimple, created in a thin plate under plain tensile stress is, with the passage of time, transformed into a pattern of elastic deformations over plate’s surface. As a result of that, a light object levitates not only at the centre of the plate where initial, primary dimple is located but over the entire plate.
Introduction
Conventional contact methods of manufacturing conveying are quite unsuitable for light and fragile objects and additionally inappropriate for special stringent operating conditions, such as for food, drug and semiconductor chip manufacture. Problems with contact conveying also include conveying rough materials that can reduce the life of the conveyor. Another challenge for contact conveying is sticky materials, which tend to stay on the conveyor beyond the discharge point and requires suitable cleaning and/or the conveyor to have additional mechanisms for removing the sticky material. Corrosive items should be conveyed on special corrosion-resistant belts and elaborate belt cleaning design may be necessary. Any additional mechanisms added to deal with the problems described above will add cost to a contact conveying system.1–3 Wear can occur at conveyor loading points, which creates trace quantities of substances like metal debris from abrasion. When conveying high-purity materials or delicate objects such as pharmaceuticals or electronic parts the acceptable levels of contamination are very low. Thus, the conveying of such material in industry requires rigorous cleaning and sterilisation processes. For example, in semiconductor technologies, it is challenging to convey a component of a Micro-Electromechanical System (MEMS) due to their delicate surface characteristics and fragility. Conventional assembly procedures are typically based on mechanical contact, which can lead to damage of fragile components or some degree of surface damage. Therefore, these circumstances would benefit from handling such fragile components without physical contact.4,5
For the handling or conveying of delicate and lightweight objects, for example, electronic chip parts or silicon wafers during manufacture, the microelectronics industry utilises robotic arms, conveyers and chucks, which cause mechanical attrition with the substrates. Such interaction produces particles, polluting the highly controlled work location and thus, significantly affect the product. In other industrial applications such as food packaging, sorting of postal items and pharmaceutical products, objects on a conventional production line are moved by a flexible belt, manipulator or other mechanical means such as vibratory conveyors, all of which involve contact forces with the risk of damage or friction losses. Delicate food products such as biscuits or aluminium beverage cans are currently conveyed by vibratory conveyors and air beds with consequent damage plus the production of dust, which causes problems. Levitation is the principle whereby the lifting force is applied to the conveyed item without physical contact. Five distinct techniques of levitation are identified in the literature, namely, magnetic, electric, optical, aerodynamic and acoustic.
To deal with these problems, the squeeze-film levitation (SFL) technique has been proposed, thus permitting controlled lifting and transportation of objects without any mechanical contact.
In the field of micro-assembly, food, drug, accurate measurement and semiconductor chip fabrication, precision positioning and carrying delicate items is essential. The classical conveying process, which is generally based on mechanical contact, may contaminate and damage transporting objects. Traditional non-contact conveying technologies, like magnetic systems and air cushions, also creates various drawbacks in their applications such as particle accumulation and provide of a large volume of clean air necessary for air cushions considerably rises the cost of their operation5–7). Squeeze Film Levitation (SFL) is anticipated to be an attractive contactless conveying technology since it has many advantages, for example, any material conductor or insulator, magnetic or non-magnetic, can be handled.8,9 The design of SFL can be as compact using a set of piezoelectric actuators attached to the underside a driving surface (thin plate). These distinct features make it appropriate for particular conditions where the compressed air or magnet sources for levitation and/or conveying are not applicable.
Squeeze-film technique and resulting levitation was first presented by Langlois 10 in 1962 and Salbu 11 in 1964. The essence of it is that a time-average pressure in a gap between interacting surfaces is greater than the ambient pressure, caused by the second-order influences resulting from a quick compression and de-compression of a gas film existing between the surfaces. Theoretical analysis of the squeeze-film action is based on the Reynolds equation. In 1975, Whymark 12 described a squeeze-film levitation design comprising of a piston vibration at an ultrasonic frequency of 20 kHz in order to levitate a flat brass disk with diameter of 50 mm. Wiesendanger 13 proposed a simple model that describes the basic idea of squeeze-film levitation performance. Only an entrapped gas between two surfaces rapidly compressed and decompressed was considered, and leakages at the domain boundary were neglected. The harmonic motion of the driving surface results in a non-harmonic pressure variation within the gas film which average value is greater than the ambient pressure.
In general, the squeeze-film levitation method utilises the Bernoulli principle to generate a positive pressure within a film of air existing between a base surface and levitating object (e.g. an electronic chip or silicon wafer). This is, essentially, about forcing a flow of fluid (squeezing) from the gap existing between two surfaces, that is the base surface and levitated object. That can be accomplished in a number of different ways. A classic example of squeeze-film action is described by the Reynolds equation, which envisages the case when one of the surfaces is stationary and the other one moves toward it at the right angle with an appropriate velocity thus giving rise to a pressure within the separating gap sufficient to support conveyed object. 14
As the fluid mechanics fundamentals of squeeze-film phenomenon are well established and can be found in a number of publications,15,16 therefore the emphasis of this paper is, instead, on the mechanism initiating and maintaining squeeze-film action. One of them is the use of Poisson’s contraction, a well-known physical phenomenon, 17 to create a shallow dimple in a thin and flat plate with the geometry satisfying the basic requirement of squeeze-film mechanism.
The essence of the mechanism consists in the fact that a thin plate subjected to a uniaxial load creating plane stress will deform in the direction perpendicular to the applied load. This is well known and widely accepted Poisson’s contraction phenomenon.
The size of the dimple and its depth are both controlled by the magnitude of applied load, geometry of the plate and mechanical properties (Young’s modulus and Poisson’s ratio) of the plate’s material. The shape of the dimple is such that it conforms to the requirement of the squeeze-film mechanism, that is when a planar and light object is placed on the plate at the location of the dimple the gap converging in the direction of fluid (air) flow is created.
To induce squeeze-film action the dimple must be cyclically formed. This can be achieved using piezo-electric transducers, usually called PZT actuators. Oscillation of the dimple, created by Poisson’s effect, is forcing the fluid (air) entrapped within the gap existing between the plate and a flat floating object to flow outside and inside in accordance with cyclic deformation of the plate. However, under steady-state conditions established between pulsating dimple and the planar object, the average pressure within the air film is greater than the ambient pressure.
This simplified description of the squeeze-film action leading to floating of a light, planar object suggests that only over the centrally positioned dimple the levitation can takes place and nowhere else. However, experimental observations suggest that something more complex is happening as the planar object levitates above the plate not only at the location of the central dimple but also all over the plate’s surface, although slightly less effectively. Therefore, a search for explanation accounting for experimentally observed facts was undertaken and its finding are presented below.
Experimental background
Main components of experimental set-up
Experimental set-up was designed and assembled for the specific aim to investigate the role of Poisson’s contraction in levitation mechanism of light objects.
The test rig is made of a mild steel and holds the thin plate clamped at both ends to a supporting structure. The plates used in experiments were made of aluminium with 1 and 1.9 mm thickness. The plates needed to be flat and smooth.
Figure 1 is a photograph of the experimental arrangements. The main components of the set-up are clearly visible and provide enough information concerning hardware used to investigate levitation due to Poisson’s contraction effect of a thin plate rigidly fixed at both lengthwise ends.
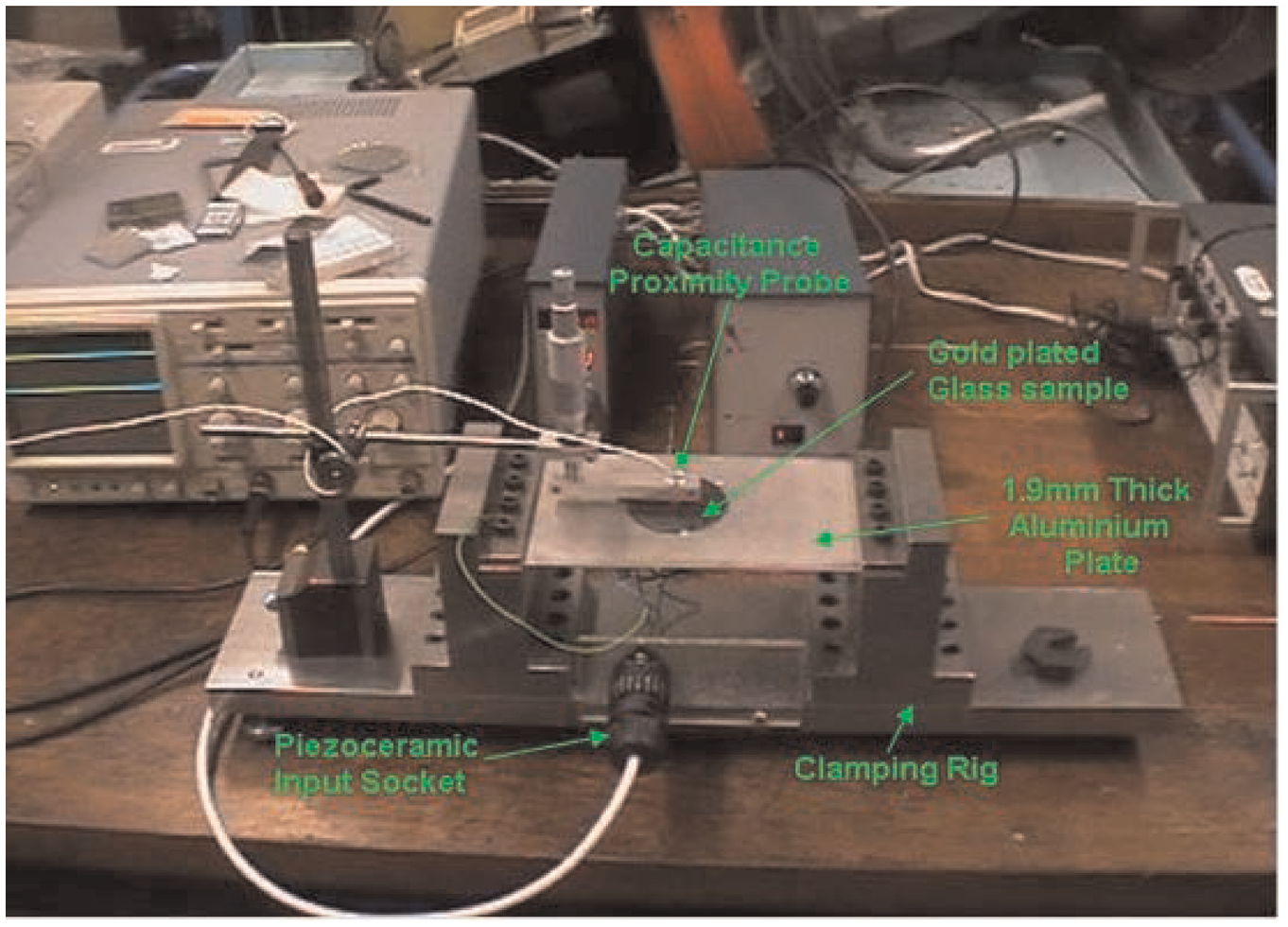
Photograph of the experimental test rig.
Electronic equipment of the rig, shown schematically in Figure 2, consisted of an 110 V transformer and a sine wave signal generator, operating in the frequency range 10–60 kHz. The 110 V transformer was required to drive the ultrasonic PZT amplifier and the PZT monitor.

Schematic showing electronic instruments attached to the rig.
The main objective of testing was to ascertain the height of levitation of a light object for a given frequency of dimple oscillation and the voltage of the current powering PZT. A high-fidelity contactless capacitance sensor was used to determine the actual levitation height for given parameters of an experiment.
Testing procedure
Before a test, the plate was thoroughly cleaned with a laboratory solvent. Afterward, the plate was firmly constrained in the test rig base. Next, the levitation object, in the form of a gold-plated glass sample (see Figure 1), was placed on the plate just above the location of PZTs. Dedicated power supply driving the PZT is set to required voltage that is Voff and Vamp. Signal generator is then adjusted to produce frequency of dimple oscillation set for a given experiment. Afterward, the non-contact distance probe is positioned above the levitating object to measure its floating height. However, as the floating object was moving in an uncontrolled way all over the plate, reason for that is given later, it was necessary to constrain its movement in order to keep it in the proximity of the contactless probe.
Summary of experimental results
Figure 3 shows the most important experimental results where levitation height of the floating object is a function of the object’s mass. 18 As expected, the levitation height is decreasing with the increase in the object’s mass. This figure gives an idea of the magnitude of load supporting capacity which the Poisson’s contraction effect is capable of creating. It also informs of the practical application potential of a device operating on the principle of squeeze-film mechanism generated by the Poisson’s phenomenon.
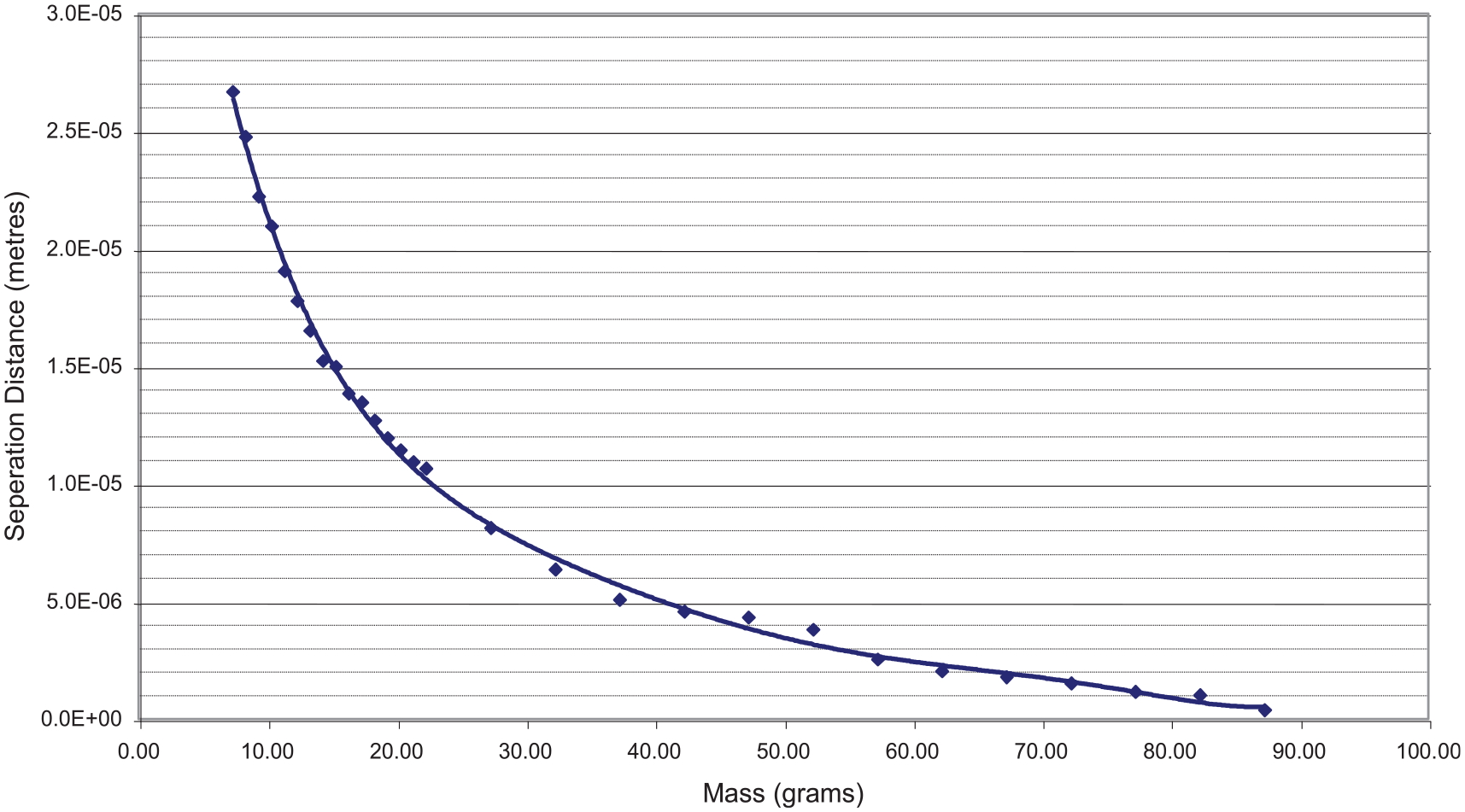
Experimentally determined load supporting capacity.
Also, during experimental testing, it was noted that the light object can levitate not only above the location of PZTs where initial dimple due to Poisson’s contraction is created but also nearly over the entire surface of the plate. To investigate this somewhat puzzling observation, the plate was covered with a fine powder which particles did not coagulate due to electrostatic attraction. Figures 4 shows experimentally observed pattern formed by the particles on the plate’s surface at frequency of PZTs oscillation equal to 7446 Hz.
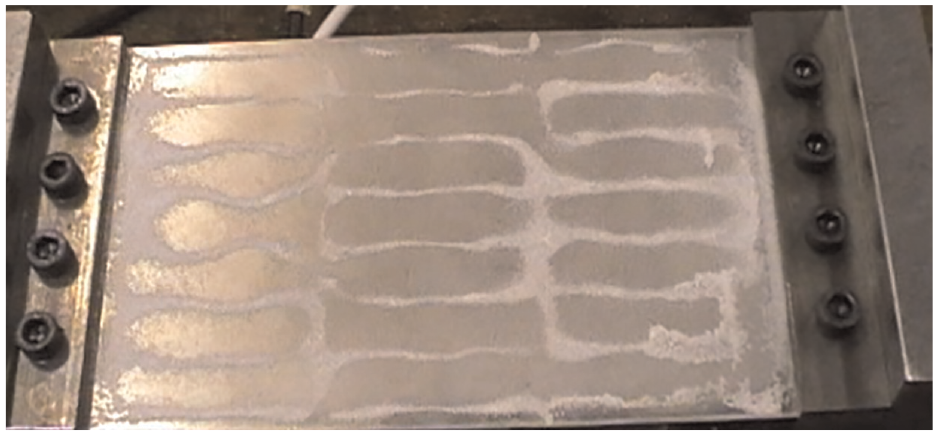
Photograph of the pattern formed by small particles on the surface of the plate.
Figure 5 is an image created by harmonic analysis of the plate under the action of PZTs at the frequency of 7437 Hz and the cyclic load with minimum of 5 N and maximum of 15 N. Similarity between the experimental observation and computer simulation is unmistakable and supports the argument developed later that cyclically repeated Poisson’s contraction is fuelling the spread of elastic deformations over the surface of the plate. The ridges and valeys seen in the above images correspond to a pattern of deformations created on the plate’s surface.

Deformation patterns of the plate resulting from harmonic analysis.
Results of computer simulation
Setup of simulation
The plate was made of aluminium and had dimensions 140 × 70 × 1 mm. Transient analysis was carried out using ANSYS. The plate was modelled as a 3D solid object made of aluminium with E = 68 GPa, Poisson’s ratio coefficient ν = 0.33, and density of 2600 kg/m3. Solid 185 elements were used, and size of the element was set to 1 mm. All degrees of freedom were applied to the shorter ends of the plate. Forces of cyclic nature and generated by the PZTs were applied to nodes as shown in Figure 9. The equation describing the change of force magnitude with time had the following form as required by ANSYS parameters.

The equation, when plotted using graph plotting facility available in ANSYS, produced cyclic load as shown in Figure 6.
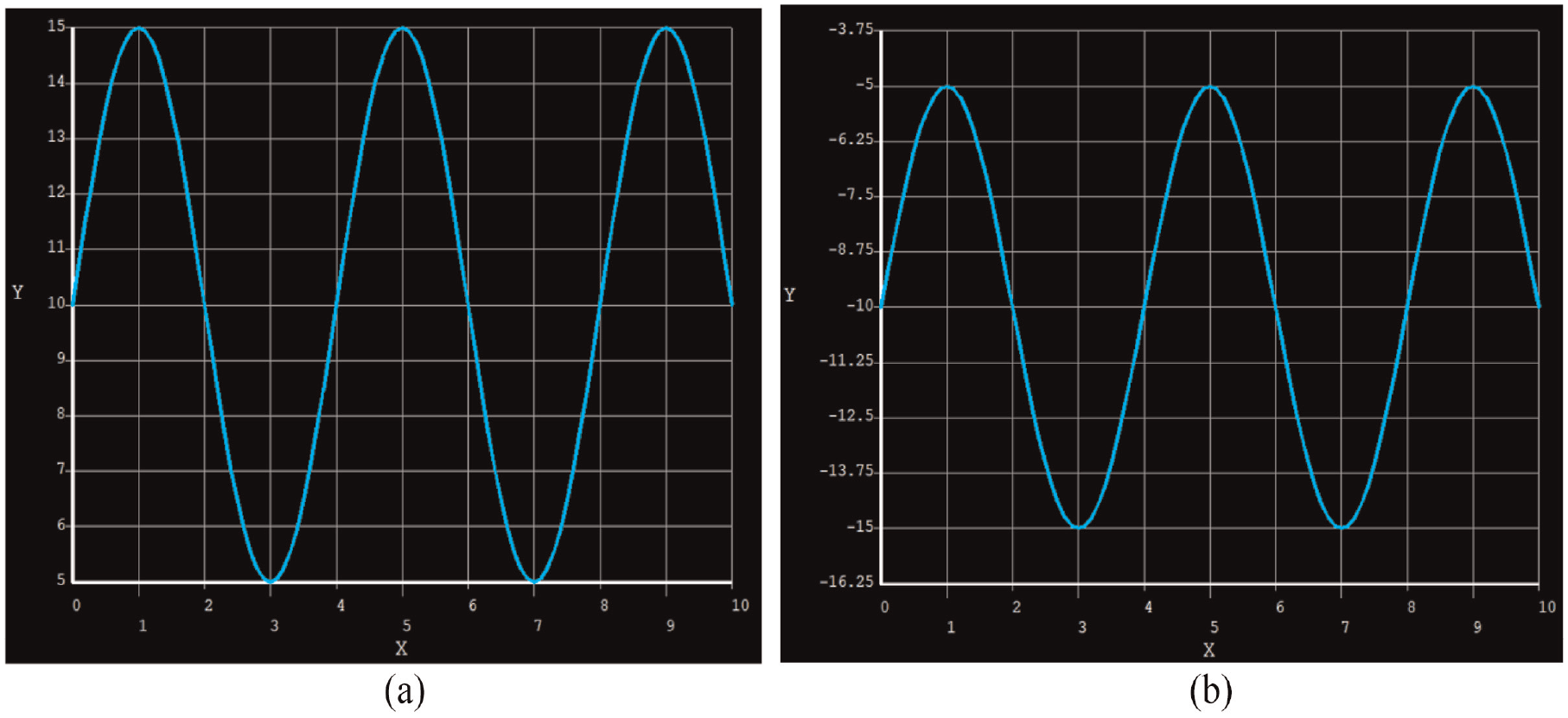
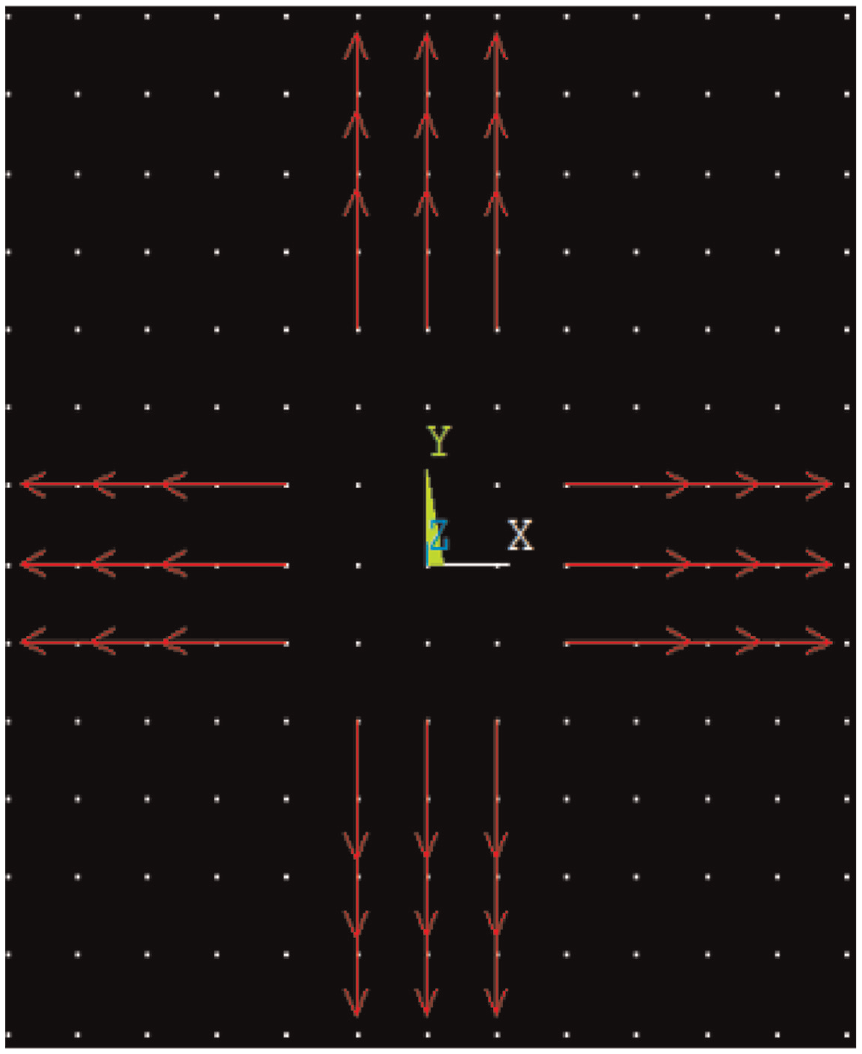
Sinusoidal fluctuation of the load generated by PZTs attached to the plate: (a) tensile loading in positive X and Y directions and (b) tensile loading in negative X and Y directions.
As can be gleaned from Figure 6, the mean load was equal to ±10 N and the amplitude load was ±5 N, resulting in the maximum load of 15 N and the minimum load of 5 N. Vertical axis denotes the load in [N] and horizontal axis indicates the number of load cycles shown in the graph. Figure 6(a) shows load applied to the positive X (to the right) and Y (upward) directions, while Figure 6(b) depicts load applied to negative X (to the left) and Y (downward) directions. As a result of that the plate was subjected to a uniaxial plain stress. Loads were applied to surface nodes located on the plate’s surface as shown in Figure 7.
Computer simulation image showing arrangement of loads created by PZTs and attached to surface nodes.
Results of simulation
As a result of the uniaxial plain stress induced in the plate by PZTs action, a single dimple is first created in the plate. Figure 8 shows this initial dimple resulting from Poisson’s contraction.

Initial dimple generated on the plate’s surface: (a) frontal view and (b) side view.
With the increase in time, this initial dimple is transformed into changing pattern of plate surface deformations. This is probably due to rapidly propagating, as an elastic wave, of the initial dimple across the plate’s surface. Figures 9 to 12 show the progress of transformation of the initial dimple into a pattern of deformations on the plate’s surface.

Transformation of the initial dimple after 0.0003 s: (a) isometric view and (b) frontal view.

Transformation of the initial dimple after 0.0005 s: (a) isometric view and (b) frontal view.

Transformation of the initial dimple after 0.0025 s: (a) isometric view and (b) frontal view.

Transformation of the initial dimple after 0.0047 s: (a) isometric view and (b) frontal view.
It is easy to observe from the above images takes from ANSYS transient analysis that the deformation introduced to the plate by the initial dimple is rapidly spreading over the plate’s surface.
Therefore, it is justified to state that the Poisson’s contraction is in a way a “prime mover” of the squeeze-film mechanism starting from a single, centrally located shallow dimple and ending with a pattern of elastic deformations of the plate.
Concluding remarks
Findings presented in this paper support the hypothesis that the Poisson’s contraction plays a central role in the levitation of a light object and is a “prime mover” of the squeeze-film mechanism. Therefore, it can be asserted that the squeeze-film action induced by Poisson’s contraction can be utilised to levitate light objects not only in the vicinity of the initial central dimple but over entire surface of the plate. This can be taken as an explanation of experimentally observed fact that a light object floats not only at the centre of the plate where the initial dimple is created but also at other location on the plate’s surface.
Footnotes
Acknowledgements
The paper is a result of research collaboration between Department of Mechanical and Aerospace Engineering, Brunel University London and Department of Mechanical Engineering, Tokyo University of Science. Authors gratefully acknowledge the support given by both universities.
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.